一种应用于运动车辆检测的背景更新方法
基于视频图像的车速检测方法分析
基于视频图像的车速检测方法分析摘要:行车速度检测在交通事故识别过程中非常重要。
以往的行车速度计算方式只可以测量车辆碰撞时的速度。
碰撞发生前,驾驶员采取制动措施降低车速,造成实测车速偏低,影响事故认定结果。
因此,本文主要研究基于视频图像的车速检测方法,能够准确地测量出碰撞前的车速,为交通事故识别提供依据。
关键词:视频图像;车速检测;方法1.基于视频的车速检测原理如今,伴随监控设备的大量运用,公路上安装了很多的监控设备,以此方便了交通管理。
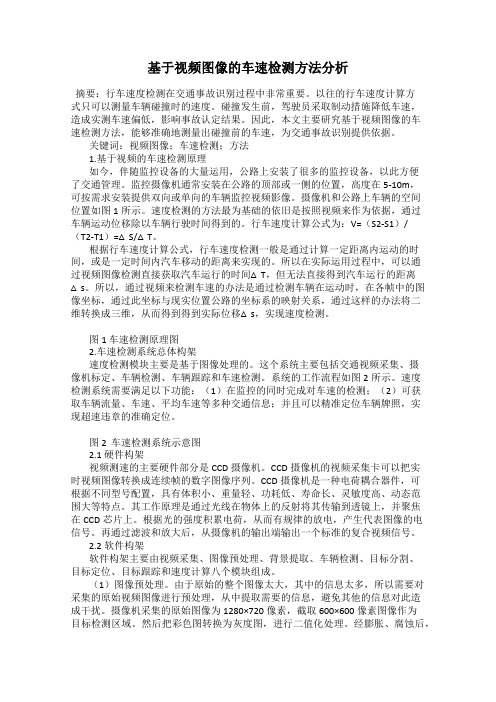
监控摄像机通常安装在公路的顶部或一侧的位置,高度在5-10m,可按需求安装提供双向或单向的车辆监控视频影像。
摄像机和公路上车辆的空间位置如图1所示。
速度检测的方法最为基础的依旧是按照视频来作为依据,通过车辆运动位移除以车辆行驶时间得到的。
行车速度计算公式为:V=(S2-S1)/(T2-T1)=△S/△T。
根据行车速度计算公式,行车速度检测一般是通过计算一定距离内运动的时间,或是一定时间内汽车移动的距离来实现的。
所以在实际运用过程中,可以通过视频图像检测直接获取汽车运行的时间△T,但无法直接得到汽车运行的距离△s。
所以,通过视频来检测车速的办法是通过检测车辆在运动时,在各帧中的图像坐标,通过此坐标与现实位置公路的坐标系的映射关系,通过这样的办法将二维转换成三维,从而得到得到实际位移△s,实现速度检测。
图1 车速检测原理图2.车速检测系统总体构架速度检测模块主要是基于图像处理的。
这个系统主要包括交通视频采集、摄像机标定、车辆检测、车辆跟踪和车速检测。
系统的工作流程如图2所示。
速度检测系统需要满足以下功能:(1)在监控的同时完成对车速的检测;(2)可获取车辆流量、车速、平均车速等多种交通信息;并且可以精准定位车辆牌照,实现超速违章的准确定位。
图2 车速检测系统示意图2.1 硬件构架视频测速的主要硬件部分是CCD摄像机。
CCD摄像机的视频采集卡可以把实时视频图像转换成连续帧的数字图像序列。
《2024年复杂背景下运动目标检测和识别关键技术研究》范文

《复杂背景下运动目标检测和识别关键技术研究》篇一一、引言在当今的科技发展浪潮中,运动目标检测与识别技术的研究已经成为计算机视觉领域的重要分支。
特别是在复杂背景下,如何有效地进行运动目标的检测与识别,已成为众多科研人员关注的焦点。
本文将深入探讨复杂背景下运动目标检测和识别的关键技术,并对其应用前景进行展望。
二、复杂背景下的运动目标检测1. 背景与挑战在复杂背景下,如城市交通监控、公共安全监控等场景中,运动目标的检测往往面临诸多挑战。
这些挑战包括背景的动态变化、光照变化、遮挡等。
这些因素都会对运动目标的检测造成干扰,从而影响其准确性和实时性。
2. 关键技术针对上述挑战,目前常用的运动目标检测技术包括基于背景减除的方法、基于光流的方法以及基于深度学习的方法等。
其中,基于深度学习的方法在复杂背景下的运动检测目标中表现出了显著的优势。
通过深度神经网络对图像进行特征提取和分类,可以有效地实现运动目标的准确检测。
三、运动目标识别技术1. 识别流程运动目标识别是在检测的基础上,对目标进行分类和识别。
其流程包括特征提取、分类器训练和目标识别等步骤。
在特征提取阶段,需要从图像中提取出能够反映目标特性的有效信息;在分类器训练阶段,需要利用大量样本对分类器进行训练,使其能够准确地对目标进行分类;在目标识别阶段,则需要利用已训练好的分类器对图像中的目标进行识别。
2. 关键技术在运动目标识别中,常用的技术包括基于深度学习的目标识别、基于机器学习的目标识别等。
其中,基于深度学习的目标识别技术在近年来得到了广泛的应用。
通过构建深度神经网络模型,可以有效地提取目标的特征信息,从而提高识别的准确性和效率。
四、关键技术研究与应用前景1. 技术研究针对复杂背景下的运动目标检测与识别,未来的研究方向主要包括提高算法的鲁棒性、优化算法的实时性以及拓展算法的应用场景等。
具体而言,可以通过改进算法模型、优化参数设置、引入新的特征提取方法等方式来提高算法的鲁棒性和实时性;同时,也可以将该技术应用于更多领域,如智能交通、智能安防等。
《2024年交通场景下的车辆行人多目标检测与跟踪算法研究》范文
《交通场景下的车辆行人多目标检测与跟踪算法研究》篇一一、引言在现代化交通系统中,对于车辆行人多目标检测与跟踪的准确性以及效率,正变得愈发重要。
对于实现自动驾驶、交通流量分析以及事故预防等应用,多目标检测与跟踪技术发挥着至关重要的作用。
本文将深入探讨交通场景下的车辆行人多目标检测与跟踪算法的研究现状、方法和应用。
二、多目标检测与跟踪的背景和意义在复杂的交通场景中,对车辆和行人多目标进行检测和跟踪是计算机视觉领域的重要研究方向。
这种技术能够实时获取交通场景中的动态信息,为自动驾驶、智能交通系统等提供关键数据支持。
同时,通过多目标检测与跟踪技术,我们可以更好地理解交通流动态,预测可能的交通状况,以实现事故预防和交通优化。
三、多目标检测与跟踪算法研究现状目前,多目标检测与跟踪算法主要包括基于深度学习和传统计算机视觉的方法。
其中,基于深度学习的方法在处理复杂交通场景时表现出色。
例如,卷积神经网络(CNN)在特征提取和目标识别方面具有强大的能力,而循环神经网络(RNN)和长短期记忆网络(LSTM)等在序列数据处理中具有优势,可实现目标的持续跟踪。
四、车辆行人多目标检测算法研究车辆行人多目标检测是利用图像处理技术从交通场景中提取出车辆和行人等目标信息的过程。
常见的检测算法包括基于区域的方法、基于特征的方法以及基于深度学习的方法。
其中,基于深度学习的目标检测算法如Faster R-CNN、YOLO等在准确性和实时性方面表现出色。
这些算法能够自动学习目标的特征表示,从而实现对复杂交通场景中车辆和行人的准确检测。
五、车辆行人多目标跟踪算法研究多目标跟踪是在检测到目标的基础上,通过关联分析等方法实现对多个目标的持续跟踪。
常见的多目标跟踪算法包括基于滤波的方法、基于匹配的方法以及基于深度学习的方法。
其中,基于深度学习的方法通过学习目标的时空特征,实现更准确的跟踪。
同时,利用神经网络模型如Siamese网络等可以实现高效的在线学习和跟踪。
基于背景差分和均值漂移的闯红灯车辆视频自动检测系统

基于背景差分和均值漂移的闯红灯车辆视频自动检测系统李宗阳;熊显名【摘要】在视频序列中使用均值漂移算法进行运动目标跟踪是一种可行的办法,但这种方法需要手动指定初始跟踪目标,无法做到全自动跟踪.在十字路口这一静态背景下,通过缩小感兴趣区域,使用背景差分的方法,结合图像形态学处理,完成对运动车辆目标的自动获取,从而实现闯红灯目标的抓取.自动检测系统和人工检测的对比实验表明,该系统的正确检出率可达到95.4%以上.%10.3969/j.issn.1000-386x.2012.10.075【期刊名称】《计算机应用与软件》【年(卷),期】2012(000)010【总页数】4页(P283-286)【关键词】视频检测;多目标跟踪;均值漂移【作者】李宗阳;熊显名【作者单位】桂林电子科技大学电子工程学院广西桂林541004;桂林电子科技大学电子工程学院广西桂林541004【正文语种】中文【中图分类】TP3910 引言在交通违章行为中,闯红灯是最为常见并且比较容易判断的一种违章行为。
已有的较为成熟的方式是使用感应线圈、雷达、超声波等技术进行检测[1],而图像视频处理技术应用在闯红灯检测中仍存在一些问题,如行人、非机动车产生的干扰目标、天气变化产生的不规则噪声、光线变化引起的颜色变换等等。
相比传统检测技术,视频检测技术具有安装简单、维护方便、直观的违章行为信息等等。
直接通过监控视频进行违章行为的检测将成为今后发展的主流方向。
当前视频检测的主要方法有:相邻帧差法、背景差分法、光流场法[2-4]等。
其中相邻帧差法实现简单运算速度快,但在运动体内部容易产生空洞;背景差分法依赖于背景图像的可靠性;光流场法[5]计算复杂且耗时,不适于实时检测。
基于均值漂移的方法是运动目标跟踪的另外一个方向。
但是这种方法需要手动指定初始跟踪区域,无法做到全自动检测跟踪。
本系统在总结现有车辆视频检测技术的基础上,针对十字路口闯红灯这一特定场景下的特殊行为,通过系统操作确定感兴趣的监控区域ROI(Region of Interest),在ROI内进行背景差分获得运动目标,结合图像形态学的处理办法,去除行人及自行车等干扰目标,得到车辆运动目标的二值化图像。
运动的目标识别与跟踪简述

运动的目标识别与跟踪简述【摘要】运动的目标识别与跟踪在现代技术领域中扮演着重要角色,为智能系统和自动驾驶等领域提供了关键支持。
本文首先介绍了目标识别在运动中的重要性,随后详细讨论了运动目标识别技术和运动目标跟踪技术的原理和应用。
接着介绍了主流的运动目标跟踪算法,以及碰撞避免和路径规划的相关内容。
未来发展的趋势将更加注重算法优化和智能化技术的应用,成果的应用前景广阔,并为智能交通和智能机器人等领域提供更多可能性。
总结来看,运动的目标识别与跟踪已经成为现代科技领域中的关键技术,未来发展前景光明,将为智能技术的发展带来更多机遇和挑战。
【关键词】关键词:目标识别、目标跟踪、运动技术、算法、碰撞避免、路径规划、发展趋势、成果应用、总结。
1. 引言1.1 运动的目标识别与跟踪简述现如今,运动的目标识别与跟踪在人工智能和机器视觉领域扮演着至关重要的角色。
目标识别是指在图像或视频中准确地找到并标识出特定的目标,而目标跟踪则是指在不同帧的图像或视频中追踪这些目标的位置和运动轨迹。
这两项技术的结合可以使人们更好地理解和分析所观察的运动,同时也可以为各种领域带来更多的应用场景。
运动目标识别技术通常包括目标检测和目标分类两个步骤。
目标检测是指在图像中找到目标的位置并用矩形框标识出来,而目标分类则是将检测到的目标分为不同的类别。
在目标跟踪方面,主要有基于特征匹配、卡尔曼滤波、神经网络等方法。
随着深度学习和神经网络技术的不断发展,运动目标识别和跟踪的准确性和效率也在不断提升。
运动的目标识别与跟踪技术在日常生活和工业生产中具有广泛的应用前景,未来随着技术的不断进步和完善,相信这些技术将会在更多领域发挥重要作用。
2. 正文2.1 目标识别的重要性目标识别是运动目标跟踪过程中的第一步,其重要性不言而喻。
目标识别是保障跟踪系统准确性的基础,只有正确地识别出目标对象,才能做到后续的跟踪工作。
目标识别可以提高系统的效率,避免对非目标物体的追踪,节省计算资源和时间。
基于深度学习的车辆检测方法研究进展
基于深度学习的车辆检测方法研究进展摘要:随着智能交通系统和自动驾驶技术的快速发展,车辆检测成为了关键的研究领域。
传统的车辆检测方法在准确性和鲁棒性方面存在一定的局限性,而深度学习技术的出现为车辆检测带来了新的突破。
本文对基于深度学习的车辆检测方法的研究进展进行了综述,包括常用的深度学习模型、算法的改进以及面临的挑战和未来的发展方向。
关键词:深度学习;车辆检测;卷积神经网络;目标检测一、引言车辆检测是智能交通系统、自动驾驶和安全监控等领域的重要基础。
准确、快速地检测车辆对于交通管理、事故预防和自动驾驶的实现具有重要意义。
传统的车辆检测方法主要基于图像处理和计算机视觉技术,如边缘检测、模板匹配和特征提取等,但这些方法在复杂场景下的性能往往不够理想。
深度学习技术的发展为车辆检测提供了新的思路和方法,其能够自动学习图像特征,具有更高的准确性和鲁棒性。
二、常用的深度学习模型在车辆检测中的应用(一)卷积神经网络(CNN)CNN 是深度学习中最常用的模型之一,在车辆检测中得到了广泛的应用。
CNN 可以自动提取图像中的特征信息,对车辆的外观、形状和纹理等特征具有很强的学习能力。
例如,VGG、ResNet 和 Inception 等经典的 CNN 模型在车辆检测任务中取得了较好的效果。
通过对大量的车辆图像进行训练,这些模型可以学习到不同类型车辆的特征,从而实现对车辆的准确检测和分类。
(二)区域卷积神经网络(R-CNN)R-CNN 是基于 CNN 的一种改进型车辆检测方法,它将车辆检测问题转化为一个目标分割问题。
首先,通过选择性搜索等方法生成大量的候选区域,然后将这些候选区域输入到 CNN 中进行特征提取,最后使用分类器对每个候选区域进行分类,判断其是否为车辆。
R-CNN 系列算法包括 R-CNN、Fast R-CNN 和 Faster R-CNN 等,它们在检测精度和速度方面不断进行改进,成为了车辆检测领域的重要算法。
城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究共3篇
城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究共3篇城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究1在自动驾驶技术的浪潮下,越来越多的汽车制造公司正在投入巨额资金进行研发,以获得市场竞争的优势。
而城市环境下的自动驾驶车辆正是该领域中的一个关键问题。
基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法的研究得到了越来越多的关注。
本文将就这个话题进行详细的阐述。
首先,城市环境下的自动驾驶车辆需要具备多目标检测及跟踪的能力,以保证其行驶安全。
在城市繁忙的路段和复杂的地形条件下,自动驾驶车辆需要高精度地探测前方所有的车辆、行人和障碍物等,以便根据这些信息做出适当的行动。
同时,自动驾驶车辆还需要能够实现跟踪目标物体的功能,以确保车辆的路径规划和控制的准确性。
其次,基于三维激光雷达的技术是实现这种多目标检测及跟踪的一种有效方式。
三维激光雷达能够获取具有高精度的点云数据,可以实现对目标物体的三维位置、形状和运动状态的准确检测和跟踪。
此外,三维激光雷达还可以获取一系列的地面特征信息,如路况和道路重建等,在城市环境下自动驾驶车辆的行驶过程中起到至关重要的作用。
第三,基于三维激光雷达的多目标检测及跟踪算法是实现城市环境下自动驾驶车辆的一个关键环节。
对于一个自动驾驶车辆而言,如何在复杂的城市环境下,高效地检测和跟踪多个目标物体是一个具有挑战性的任务。
在这个任务中,有很多复杂的因素需要考虑,如多个目标物体之间的交叉轨迹、不同目标物体之间的尺度差异和位置变化等。
为了解决这些问题,研究人员提出了许多基于三维激光雷达的多目标检测及跟踪算法。
其中一些算法使用了深度学习技术,如卷积神经网络和目标检测网络,以实现更高精度的检测和跟踪。
同时,一些算法采用了模型预测方法,通过建立模型,来对目标物体的运动状态进行预测。
这些算法在提高自动驾驶车辆检测和跟踪精度的同时,也提高了车辆的控制效率和安全性。
最后,需要注意的是,基于三维激光雷达的多目标检测及跟踪算法仍然存在一些问题和挑战。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前景 区域采 用逐 渐修正法进行更新 。但是逐渐修 正法 中的 J
值带有猜测性 ,当一 段时间内运动车辆 区域的灰度值 均大 干 或小于相对应 的前帧背景 区域灰度值时 ,背景更新会 出现 很大的误 差。因此 ,提 出一种在分块思想的基础上引入滤波 和逐 渐修 正的改进背景更新方法。
图 1 圈像 分块效 果 ) 图 2 小块边缘 4个区域划分图
基 金项 目:国家 自然科 学基金 资助项 目(17 0 9 6 0 5 1)
依次计算 当前帧中每个小 方块 4个区域的均值和方差 , 并与前 帧背景 中对应位 置 区域的均值 和方差 相 比较 ,如果 4 个区中至少有一个 区包含前景 区域 ,就认定此小 方块 为前
b o k r e aaey u d td l c saes p r t l p a e Teபைடு நூலகம்tr s ls d mo s r t h twh n t e me h d i p le o mo i g v hil ee t n h c u a y i m p o e y s e u t e n ta e t a e h t o s a p id t v n e ce d t c i ,t e a c r c s i r v d b o a o t i e p r e t n i ee c e c l o i r v d si h l . b u n ec n dt n a m f in y a s mp o e lg t i y
新模 型是对 背景和前景 区域分别进行更新 , 这种 方法简单 , 但是当背景变化较快或者突变 时,背景 的更新效果不理想。 为了兼顾更新 效果和时效性 ,本文采用一种选择性背景更新 方法并对其进行 改进 。
信息不能很好排除。
2 基于滤波和逐渐修正 的选择性 背景更新方法 . 2
第3 8卷 第 4期
\ -8 bl3
・
计
算
机
工
程
21 0 2年 2月
Fe r a y 01 b u r 2 2
NO. 4
Co pu e g n e i m trEn i e rng
人工智 能 及识 别技 术 ・
一
文章编号:1 0 _2(1) —07— 2 文献标识码: 0 —3 8 02 4_ 4 0 4 2 0 1 A
作者简介 : 甘
玲(94 ) 女 , 16 - , 教授 , 主研方向 : 图像处理与分析 , Em i qdx@16 o — al yp l 2. r :c cn
计算机语言 ,编译系统 ;潘小 雷 , 士研究生 硕
收稿 日期 :2 1 0—6 01 82 -
景区域 ,否则认定此小方块是背景 区域 。背景区域小块用 当前帧相对应 区域小块进行更新 ,而前景 区域小块用前帧背 景相对应区域小块进行 更新 。但是没有考虑 当前帧前景 区域 对应的背景区域细微 的变化 ,以至于块与块之 间的衔接不够 自然 ,同时没有把背景 更新 的速 度考虑进来 ,导致一些 干扰
最 后对前景 区域和背景区域分别进行 更新 ,主要步骤如下 :
Sel用多帧平均法初始化 背景 B 。 t p 1 Se 2将 B 和第 2帧 ,分成区域小 块, tp 1 2 并计算各 区域小
块 的均 值 和 方 差 。
Se 3将 B 和笫 2帧 ,相对应 的区域小块边缘 4个 区的 tp 1 2 均值 和方差 分别相减 ,差值均在 限制阈值之 内的为对应的背
a n ii t re e c swe k Th s t eb o k b s d s l c i e b c g o nd u dae me h d i o nd t a t. e f r n ei a u , h l c — a e e e t a k r u p t t o sc mb n d wi e fl rn t o n r du l he n v i e t t t i g me h d a d t g a a l h h i e he y c re to t o r e o r fe h t e b c g o n . e c r e tfa n h r v o so e a e d vi e n o s l b o k . o r c i n me h d i O d rt e r s h a k r u d Th u n r me a d t e p e i u n r i d d i t ma l l c s Ac o d n o t e m e n n c r i g t h a
新 的优劣直接影响背景差分法的效果。 目前常 用的背景更新 方法有基于高斯分布 的背景更新模型、基于 卡尔曼滤波 的背 景 更新模 型、选择性背景更新模型等 。基于 高斯 分布 的背景 更新 模型初始化速度慢 ,时效性差 ;基于卡尔曼滤波 的背 景更新模型需要一幅不含车辆的初始背景 ;选择性 背景 更
[ src ]T ebokb sdslciebc go n p aemeh de isw an se a n aua bt entebo ka dteajcn lc Abtat h lc—ae e t ak ru du dt to xs ek essh tts n trl ew e lc n dae t ok e v t t iiu h h b
2 常用选择性背景更新方法
2 基于分块思想的选择性背景更新方法 . 1 首先将图像划分为 Mx N个小块 , 如图 1 所示。 然后将各
小块边缘划分为 4个 区域 ,如图 2所示 。
3 改进的背景更新方法
首先利用分块 思想将 图像分成 区域小块 ,然后根据 当前 帧与前帧背景相对应 区域小块 的均值和方差 , 确立前景区域、 背景 区域及前景 区域小块对应的背景区域小块 的变化 大小 ,
DoI 1 . 6/is. 0 —4 82 1.40 6 : 03 9jsn1 03 2 .0 20 .5 9 . 0
1 概述
运动车辆的检测和实时跟踪是智能交通系统 中的核心 内 容和关键技术 。在运用背景差 分法检测运动车辆 时,由于光 线和环境 的变化 ,因此需要对 背景进 行实时更新…。背景更
中图分类号:T311 P9・ 4
种应 用于运动 车辆检测 的背景 更新 方法
甘 玲 ,潘 小雷
( 重庆 邮电大学计算机科学与技术学院 ,重庆 4 0 6 ) 0 0 5
摘
要 :基于分块思想的选择性背景更新方法存在块与块之间衔接 不 自 、抗干扰性弱等不足 。为此 , 出一种引入滤波和逐渐修正的背 然 提
[ ywo d ]b cgo n p a ; l kae ; lr g ga ul orcin b cgo n brcin mo igv hc eet n Ke r s ak ru du dt bo a ft i ;rd al cr t ; ak ru ds t t ; vn e ild t i e c r i en y e o u a o e co
a d v r a c ft e c r e tb c g o n i i e tbl h d t a e f r g o n l c s b c gr u d bl c s T c g o n l c sa h o e r u d n a i n e o h u r n a k r u d, t s sa i e h t h o e r u d b o k , a k o n o k . heba k r u d b o k nd t e f r g o n s t
Ba kg o c r und Upda eM e ho t t d App id n M o i hil t c i n le i v ngVe c eDe e to
GAN n . AN a -e Li g P Xi o li ( o l eo o ue c n e n e h oo y C o g igUnv r t o o t a dT l o C l g f mp tr i c d c n lg , h n qn ie s y f ss n ee mmu i t n , o g ig4 0 6 , h n ) e C Se a T i P c nc i s Ch n qn 0 0 5 C ia ao
景更新 方法 。利用分块思想将图像分成区域小块 ,根据均值和 方差确 立前景 区域 、背景 区域及其变化大小 ,对 前景区域和背景区域分别进
行更新 。实验 结果证 明,应 用该方法进行运动车辆检测 ,其检测正确率能提高 9 %左右 ,时问效率也稍有提高 。 关健 诃 :背景更新 ;块区域;滤波 ;逐渐修正 ;背景差分 ;运动车辆检测