基于ARM7处理器LPC2119的USB-CAN转换器设计
基于ARM内核的LPC系列芯片技术文献及设计方案汇总
基于ARM内核的LPC系列芯片技术文献及设计方案汇
总
成像测井中基于ARM LPC1788 显示系统的设计
本设计以控制能力突出,外设接口丰富,运算速度快的ARM 芯片
LPC1788 作为控制、数据处理核心,使用了位于AHB 总线上能进行快速访问的多个GPIO 口以扩展定制的宽温液晶屏,对各种信息的显示明确、清晰、实时、稳定可靠,并能在恶劣的环境中正常工作。
基于LPC3250 的智能电子血压计设计
该多功能电子血压计,采用示波法进行测量,其原理是通过测量血液流动时对血管壁产生的振动,在袖带放气过程中,只要袖带内压强与血管压强相同,则振动最强。
其优点为:使用简易,可一人独自操作,测量值便于记录,体积轻巧便于携带。
基于LPC2119 的配电控制模块设计
配电控制模块是智能配电箱的控制单元,本文基于LPC2119 设计配电控制模块,嵌入式微处理器LPC2119 为控制核心,主要由CAN 收发器、LIN 收发器、输入接口、输出接口和电源模块等组成。
基于ARM 控制器LPC2294 的CAN/PCI 智能通信卡设计
本设计选用的ARM 控制器LPC2294 内部集成有四路CAN 控制器,不仅能担起主控制器的工作,同时还可作为CAN 网络的数据传输控制器,来与网络中的节点实现数据交换。
基于LPC2210 的网络化控制的智能温度传感器
本系统就是采用嵌入式微处理器作为核心,使用数字式的温度传感器作为采集单元。
系统设计中采用的是信息技术领域最新的B/S(Brower/Server,浏。
基于ARM和CAN息线的数据采集系统设计.
基于ARM和CAN息线的数据采集系统设计基于ARM和CAN息线的数据采集系统设计类别:模拟技术引言在工业生产的很多领域都需要对生产过程进行监控管理,因此以A/D转换器为核心的数据采集系统必不可少。
为了提高监控系统的准确性与可靠性,数据采集卡可选用∑一△型高分辨率的A/D转换器。
而控制器局域网(CAN)能有效支持具有高安全级的分布式实时控制,凭借其在噪声环境中的可靠性及其故障状态检测,以及从故障状态恢复的能力被广泛应用于工业控制等领域。
本文设计了一种关于CAN总线的双通道高精度采集系统,提高了工业控制中的信号采集处理以及传输抗干扰能力。
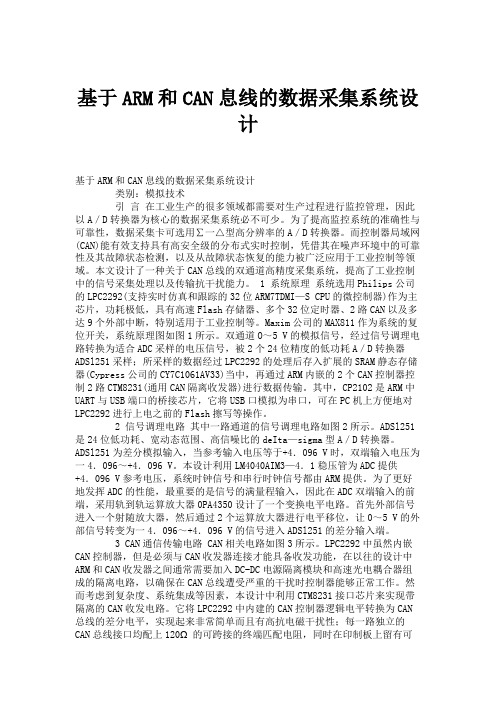
1 系统原理系统选用Philips公司的LPC2292(支持实时仿真和跟踪的32位ARM7TDMI—S CPU的微控制器)作为主芯片,功耗极低,具有高速Flash存储器、多个32位定时器、2路CAN以及多达9个外部中断,特别适用于工业控制等。
Maxim公司的MAX811作为系统的复位开关,系统原理图如图1所示。
双通道O~5 V的模拟信号,经过信号调理电路转换为适合ADC采样的电压信号,被2个24位精度的低功耗A/D转换器ADSl251采样;所采样的数据经过LPC2292的处理后存入扩展的SRAM静态存储器(Cypress公司的CY7C1061AV33)当中,再通过ARM内嵌的2个CAN控制器控制2路CTM8231(通用CAN隔离收发器)进行数据传输。
其中,CP2102是ARM中UART与USB端口的桥接芯片,它将USB口模拟为串口,可在PC机上方便地对LPC2292进行上电之前的Flash擦写等操作。
2 信号调理电路其中一路通道的信号调理电路如图2所示。
ADSl251是24位低功耗、宽动态范围、高信噪比的deIta—sigma型A/D转换器。
ADSl251为差分模拟输入,当参考输入电压等于+4.096 V时,双端输入电压为一4.096~+4.096 V。
本设计利用LM4040AIM3—4.1稳压管为ADC提供+4.096 V参考电压,系统时钟信号和串行时钟信号都由ARM提供。
基于ARM的便携式 CAN总线测试仪的设计
5科技创新导报S T y I2007N O.35Sci e nc e a nd Tec hno l o gy I nn ov at i on H e r al d学术论坛科技创新导报CAN总线测试仪,它把以太网和现场总线连接起来,实现了以太网(监控层)与CAN总线网(生产测控层)之间的连接,使得上下层数据能方便地通信。
C A N总线测试仪,通过它实现PC机对C AN总线生产测控设备监控、对C AN总线设备上的信息进行分析。
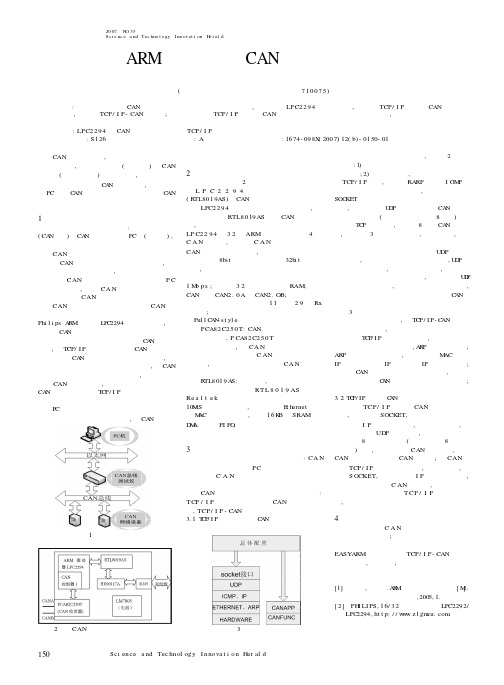
1系统结构系统总体结构分为三部分:现场测控网络(CA N网络)、CA N总线测试仪、PC机(监控机),如图1所示。
CAN总线是一个设备互连总线型控制网络。
在CAN总线上可以挂接多个设备节点,各设备间可以自主相互通信,实现复杂网络控制系统。
但CAN设备数据信息无法直接到达P C进行数据分析,要想CA N设备数据信息进入监控机需通过CAN总线测试仪。
CAN总线测试仪由通信处理器、CAN总线控制器和以太网控制器三部分组成。
其中以Phi l i ps A R M系列的L P C2294为核心处理器,它实现了CA N控制网络与以太网之间的协议转换。
以太网信息管理层的控制指令发送到C A N总线测试仪,将T CP/I P协议数据转换为CA N协议形式数据发送至CA N控制网络中的指定设备节点,完成监控层对现场设备层的控制。
同样地,当CAN网络上的设备数据要传输到监控层时,可将数据发送到CAN总线测试仪,再通过协议转换程序将CA N协议数据封装成T C P/I P协议数据发送至以太网上的监控计算机。
P C机上的信息处理程序是一个根据用户的具体要求而设计的用户层应用软件,为CA N总线设备提供数据处理工作。
2硬件设计硬件结构如图2所示。
主要的组成部分包括L P C2294微处理器、网络控制器(R TL8019AS)、CAN收发器等。
LPC2294微处理器是主要的控制部分,实现对网络芯片RTL8019AS以及CAN器件的控制,并进行两者之间的协议转换和通讯。
LPC2119调试说明
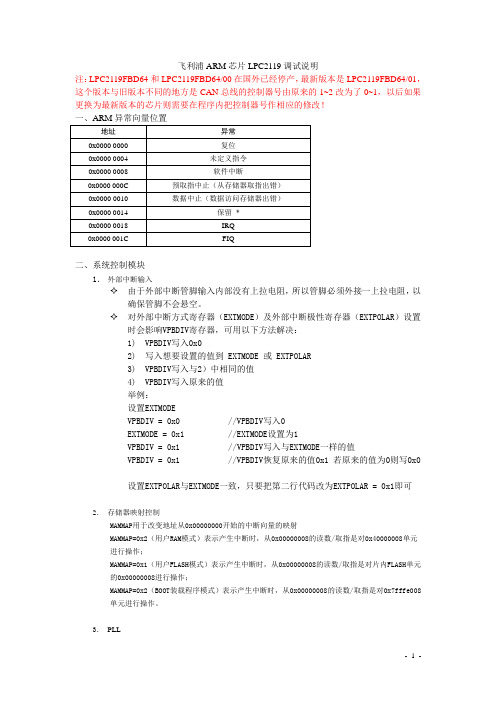
飞利浦ARM芯片LPC2119调试说明注:LPC2119FBD64和LPC2119FBD64/00在国外已经停产,最新版本是LPC2119FBD64/01,这个版本与旧版本不同的地方是CAN总线的控制器号由原来的1~2改为了0~1,以后如果更换为最新版本的芯片则需要在程序内把控制器号作相应的修改!二、系统控制模块1.外部中断输入✧由于外部中断管脚输入内部没有上拉电阻,所以管脚必须外接一上拉电阻,以确保管脚不会悬空。
✧对外部中断方式寄存器(EXTMODE)及外部中断极性寄存器(EXTPOLAR)设置时会影响VPBDIV寄存器,可用以下方法解决:1)VPBDIV写入0x02)写入想要设置的值到 EXTMODE 或 EXTPOLAR3)VPBDIV写入与2)中相同的值4)VPBDIV写入原来的值举例:设置EXTMODEVPBDIV = 0x0 //VPBDIV写入0EXTMODE = 0x1 //EXTMODE设置为1VPBDIV = 0x1 //VPBDIV写入与EXTMODE一样的值VPBDIV = 0x1 //VPBDIV恢复原来的值0x1 若原来的值为0则写0x0设置EXTPOLAR与EXTMODE一致,只要把第二行代码改为EXTPOLAR = 0x1即可2.存储器映射控制MAMMAP用于改变地址从0x00000000开始的中断向量的映射MAMMAP=0x2(用户RAM模式)表示产生中断时,从0x00000008的读数/取指是对0x40000008单元进行操作;MAMMAP=0x1(用户FLASH模式)表示产生中断时,从0x00000008的读数/取指是对片内FLASH单元的0x00000008进行操作;MAMMAP=0x2(BOOT装载程序模式)表示产生中断时,从0x00000008的读数/取指是对0x7fffe008单元进行操作。
3.PLLPLL频率计算方法Fosc:晶振频率;Fcco:PLL电流控制震荡器的频率;Fcclk:PLL输出频率(即CPU的时钟频率)M:PLLCFG寄存器中MSEL位的倍频器值;P:PLLCFG寄存器中PSEL位的分频器值。
基于CAN总线焊接车间环境实时监控系统的设计
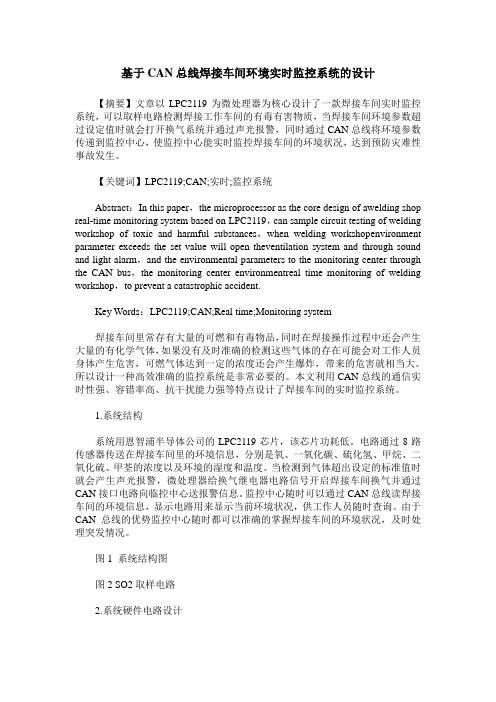
基于CAN总线焊接车间环境实时监控系统的设计【摘要】文章以LPC2119为微处理器为核心设计了一款焊接车间实时监控系统,可以取样电路检测焊接工作车间的有毒有害物质,当焊接车间环境参数超过设定值时就会打开换气系统并通过声光报警,同时通过CAN总线将环境参数传递到监控中心,使监控中心能实时监控焊接车间的环境状况,达到预防灾难性事故发生。
【关键词】LPC2119;CAN;实时;监控系统Abstract:In this paper,the microprocessor as the core design of awelding shop real-time monitoring system based on LPC2119,can sample circuit testing of welding workshop of toxic and harmful substances,when welding workshopenvironment parameter exceeds the set value will open theventilation system and through sound and light alarm,and the environmental parameters to the monitoring center through the CAN bus,the monitoring center environmentreal time monitoring of welding workshop,to prevent a catastrophic accident.Key Words:LPC2119;CAN;Real time;Monitoring system焊接车间里常存有大量的可燃和有毒物品,同时在焊接操作过程中还会产生大量的有化学气体,如果没有及时准确的检测这些气体的存在可能会对工作人员身体产生危害,可燃气体达到一定的浓度还会产生爆炸,带来的危害就相当大。
基于ARM的自主式移动机器人设计
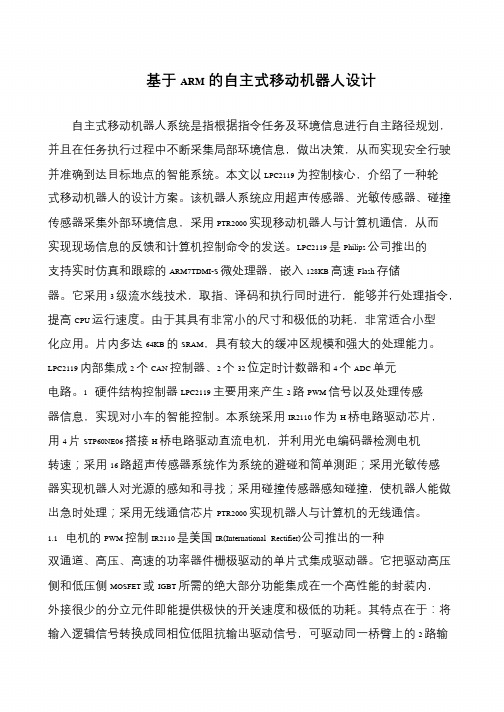
基于ARM的自主式移动机器人设计自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。
本文以LPC2119 为控制核心,介绍了一种轮式移动机器人的设计方案。
该机器人系统应用超声传感器、光敏传感器、碰撞传感器采集外部环境信息,采用PTR2000 实现移动机器人与计算机通信,从而实现现场信息的反馈和计算机控制命令的发送。
LPC2119 是Philips 公司推出的支持实时仿真和跟踪的ARM7TDMI-S 微处理器,嵌入128KB 高速Flash 存储器。
它采用3 级流水线技术,取指、译码和执行同时进行,能够并行处理指令,提高CPU 运行速度。
由于其具有非常小的尺寸和极低的功耗,非常适合小型化应用。
片内多达64KB 的SRAM,具有较大的缓冲区规模和强大的处理能力。
LPC2119 内部集成2 个CAN 控制器、2 个32 位定时计数器和4 个ADC 单元电路。
1 硬件结构控制器LPC2119 主要用来产生2 路PWM 信号以及处理传感器信息,实现对小车的智能控制。
本系统采用IR2110 作为H 桥电路驱动芯片,用4 片STP60NE06 搭接H 桥电路驱动直流电机,并利用光电编码器检测电机转速;采用16 路超声传感器系统作为系统的避碰和简单测距;采用光敏传感器实现机器人对光源的感知和寻找;采用碰撞传感器感知碰撞,使机器人能做出急时处理;采用无线通信芯片PTR2000 实现机器人与计算机的无线通信。
1.1 电机的PWM 控制IR2110 是美国IR(International Rectifier)公司推出的一种双通道、高压、高速的功率器件栅极驱动的单片式集成驱动器。
它把驱动高压侧和低压侧MOSFET 或IGBT 所需的绝大部分功能集成在一个高性能的封装内,外接很少的分立元件即能提供极快的开关速度和极低的功耗。
基于LPC2292的嵌入式Ethernet-CAN转换器
基于LPC2292的嵌入式Ethernet-CAN转换器
王钦玉;马维华
【期刊名称】《南京航空航天大学学报》
【年(卷),期】2007(039)005
【摘要】为了在不改变原有网络结构的情况下,将现场总线控制系统改造为以太网分布式控制系统,作者研发了基于ARM体系结构的LPC2292嵌入式微控制器和RTL8019AS以太网控制器的低成本嵌入式Ethernet-CAN转换器.LPC2292采用嵌入式TCP/IP协议栈通过RTL8019AS与以太网中的设备进行通信,利用
LPC2292集成的CAN控制器与CAN总线上的终端进行通信.在通信过程
中,LPC2292进行TCP/IP协议和CAN协议之间的转换,该转换器很好地完成了两种网络之间的协议转换和数据通信.
【总页数】5页(P607-611)
【作者】王钦玉;马维华
【作者单位】南京航空航天大学信息科学与技术学院,南京,210016;南京航空航天大学信息科学与技术学院,南京,210016
【正文语种】中文
【中图分类】TN915.05
【相关文献】
1.基于Cortex-M3的Ethernet-CAN总线转换器 [J], 朱文杰;王广龙;高凤岐;乔中涛
2.基于LPC2292的Ethemet-CAN转换器的设计与实现 [J], 缪建晔;曹永华
3.一种基于W77E58的EtherNet-CAN转换器 [J], 李国洪;武壮;孙燕;王景芹;陈明霞
4.基于FPGA的嵌入式Ethernet-CAN通信转换卡设计 [J], 王方方;易灵芝;陈海燕;陆启湘
5.基于LPC2292的隔爆兼本安型矿用多协议转换器的研制 [J], 朱成杰;王瑞平;欧阳名三;高俊岭
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM的CAN-以太网转换器的设计
基于ARM的CAN-以太网转换器的设计
索明何;邢海霞
【期刊名称】《科技信息》
【年(卷),期】2008(000)018
【摘要】介绍了基于ARM的嵌入式CAN--以太网转换器设计方案,通过该转换器可以实现CAN总线与以太网的互联满足企业管控一体化的需求.
【总页数】2页(P79,81)
【作者】索明何;邢海霞
【作者单位】东华理工大学,江西,抚州,344000;淮安信息职业技术学院,江苏,淮安,223003
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于ARM的CAN-以太网互联系统的设计 [J], 王海燕;朱天扬;束海燕;张承鸿
2.基于PIC单片机的CAN-以太网协议转换器的设计 [J], 苏义鑫;王军;何力;罗佳佳
3.基于LPC2292的CAN-以太网网关的设计 [J], 饶运涛
4.基于ARM的串口/以太网协议转换器设计 [J], 刘辉;张艳;王潜平
5.基于DSP的以太网-RS422通信转换器的设计与实现 [J], 王庆贺; 吴超; 唐顺晨; 田少华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM的CAN总线智能节点的设计.
基于ARM的CAN总线智能节点的设计基于ARM的CAN总线智能节点的设计类别:模拟技术CAN(ControllerAreaNetwork)即控制器局域网,CAN总线是国际上应用最广泛的现场总线之一。
它最早是由德国Bosch公司推出的,CAN通信协议是一种用于汽车内部测量与执行部件之间的数据通信协议。
作为一种技术先进、可靠性高、功能完善、成本合理的远程网络通讯控制方式,CAN总线已被广泛应用于各个自动化控制系统中。
例如,在汽车电子、自动控制、智能大厦、电力系统、安防监控等各领域中,CAN总线具有不可比拟的优越性。
本设计给出CAN总线节点方案。
它采用内置多路CAN总线控制器的LPC2294作为主控制器,使得该节点体积小、功耗低、抗干扰性好,因而特别适用于汽车、工业控制以及医疗系统和容错维护总线中。
1硬件设计1.1LPC2294的特点 ARM7系列具有ARM7TDMI内核的32位嵌入式微处理器是目前应用很广的嵌入式RISC处理器。
该系列芯片体积小、功耗低、成本低,高性能与灵活性相结合,有较多的寄存器,提供了扩充的增强的固定长的16/32位双指令集。
用16位的Thumb指令可以节省高达35%的空间。
另外它还实行流水线作业,提供嵌入式ICE2RT逻辑,支持片上断点和调试点支持,具有先进的软件开发和调试环境。
本设计选用的LPC2294是PHILIPS公司新推出的一款功能强大的超低功耗的具有ARM7TDMI内核的32位微控制器。
144脚封装、两个32位定时器、八路10位ADC、四路CAN通道和PWM通道以及多达九个的外部中断,内部嵌入256K字节高速Flash存储器和16K字节静态RAM,包含76(使用了外部存储器)~112(单片)个GPIO口。
如此丰富的片上资源完全可以满足一般的工业控制的需要,同时还可以减少系统硬件设计的复杂度。
另外,LPC2294支持JTAG实时仿真和跟踪、128位宽度的存储器接口和独特的加速结构,使32位代码能够在高达60MHz的操作频率下运行。
基于ARM的CAN——以太网转换器的设计
11 入 式 计 算 机 模 块 该 模 块 是 转 换 器 的 硬 件 核 心 。 本 设 计 采 .嵌 用 L C 2 2A M 微 处 理 器 ,其 内部 集 成 了 2路 C P 2 9 R AN控 制 器 。 内 嵌
进行访 问。由于 R L09 T 8 1AS的 工作 电 压 是 5 而 L C 22的 I 电 传 输 。 V. P 2 9 / O ( ) AN 应 用 层 协 议 设 计 由 于 一 帧 C 2C AN 报 文 的 数 据 量 很 小 压 是 33 通 常 在 两 者 之 间 的 数 据 总 线 和 中 断信 号 线 上 串接 4 01的 . V。 71 (eiAN 最 多 只 有 1 Pl C 3个 字 节 ) ,如 果 让 以 太 网 每 次 都 只 传 输 一 帧 保护电阻。 C N 报 文 , 明 显 使 以太 网 的通 信 效 率 降 低 。但 有 时 又 不 得 不 考 虑 到 A 很 1 AN 接 口模 块 由 于 L C 2 2微 处 理 器 内 部 已 经 集 成 了 .C 3 P 29 控 制 信 息 量 的特 点 , 只 能 浪 费 以 太 网 网 资 源 。 了灵 活 处 理 , 里 充 也 为 这 C AN控 制 器 .因 此 只需 外 接 C N 收 发 器 即 可 构 成 智 能 C N 节 点 与 A A A 9位 I 号 进 行 分 配 , 定 C N应 用 层 D 制 A C N 总 线 相 连 。 为 了增 强 C N 节 点 的抗 干 扰 能 力 , 以在 C N控 制 分 利 用 C N 报 文 仲裁 域 中 的 2 A A 可 A
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM7处理器LPC2119的USB-CAN 转换器设计作者:高敏来源:《现代电子技术》2010年第22期摘要:叙述一种使用ARM7处理器实现USB接口与CAN总线的方案,通过其可以在PC实现对CAN总线上设备的监控。
系统的主控制器为NXP公司的ARM处理器LPC2119,内部集成两路独立的CAN控制器。
USB接口采用沁恒电子的CH375。
描述了USB-CAN通信接口工作的基本原理及CAN总线与USB之间的硬件接口电路。
同时,分析了固件编程及使用通用I/O模拟并口读写时序方法。
关键词:CAN总线; USB; LPC2119; CH375中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2010)22-0142-03Design of USB-CAN Converter Based on LPC2119 of ARM7 ProcessorGAO Min(Department of Applied Electronics, Jiangsu Nantong Commercial Vocational College, Nantong 226007, China)Abstract: A scheme of using ARM7 processor to realize the USB interface and CAN bus is introduced, which can monitor the devices of CAN bus on PC. The system's main controller is ARM processor LPC2119 produced by NXP, which integrated two independent CAN controllers. USB interface circuit adopts QinHeng Electronics CH375. The basic principles about the USB-CAN communication interface and the hardware interface circuit between CAN and USB are described. At the same time, the method of the firmware programming and the use of general-purpose I/O port to simulate parallel read /write timing are analyzed.Keywords: CAN Bus; USB; LPC2119; CH3750 引言控制器局域网(controller area network,CAN)是世纪年代德国BOSCH公司为现代汽车应用而推出的一种多主机局部网,由于CAN总线具有可靠性高、功能完善、成本合理、实时性等优点,CAN总线早已不再局限于汽车行业,而被广泛应用于各个自动化控制系统中,例如汽车电子、工业控制、智能大厦、安防监控、环境控制等。
目前CAN总线是国际上应用最广泛的现场总线之一[1-2]。
通用串行总线(universal serial bus,USB)作为一种协议规范,是以Intel为首的7家计算机及通信产业厂商公司于1994年11月共同提出,其除具有使用方便(即插即用)、功耗低、数据传输率高等优点外,还具有软硬件支持广泛、功耗低、硬件结构标准化和总线拓扑结构完备等特点。
目前在以计算机为上位机的应用领域,都首选USB口作为计算机与外设的接口[3]。
为了更好的将USB的通用性和CAN的专业性结合起来,通过计算机的USB接口接入CAN 专业网络,实现系统控制的便利性和应用的高效性,本文讲述了一种基于ARM7处理器实现USB接口与CAN总线的实例,通过其可以在PC实现对CAN总线上设备的监控。
1 硬件系统设计1.1 处理器简介及其外围电路设计主控制器选用NXP公司的ARM7核处理器LPC2119。
LPC2119是基于一个支持实时仿真和跟踪的16/32位ARM7TDMI-STM CPU,并带有128 KB嵌入的高速FLASH存储器。
128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行。
对代码规模有严格控制的应用可使用16位Thumb模式将代码规模降低超过30%,而性能的损失却很小。
实行流水线作业,提供Embedded ICE逻辑,支持片上断点和调试点,具有先进的软件开发和调试环境。
LPC2119具有非常小的64脚封装、极低的功耗、多个位定时器、4路10位ADC、2路CAN、PWM通道、多个串行接口,包括2个16C550工业标准UART、高速I2C接口(400 kHz)和2个SPI接口,46个GPIO以及多达9个外部中断,特别适用于汽车、工业控制应用以及医疗系统和容错维护总线[4]。
LPC2119内部集成2个CAN控制器,每一个CAN控制器都与独立CAN控制器SJA1000有着相似的寄存器结构。
它的主要特性有:单个总线上的数据传输速率高达1 Mb/s;32位寄存器和RAM访问;兼容CAN2.0B,ISO11898-1规范;全局验收滤波器可以识别所有的11位和29位标识符;验收滤波器为选择的标准标识符提供Full CAN-style自动接收。
图1所示为LPC2119外围电路,为保证可靠复位,采用外部复位电路STM809[5]。
图1 LPC2119外围电路1.2 USB接口电路设计USB接口采用沁恒电子的CH375。
CH375 是一个总线的通用接口芯片,支持USB-HOST主机方式和USB-DEVICE/SLAVE 设备方式。
在本地端,CH375 具有8 位数据总线和读、写、片选控制线以及中断输出,可以方便地挂接到单片机/DSP/MCU/MPU等控制器的系统总线上。
CH375提供了串行通信方式,通过串行输入、串行输出和中断输出与单片机/DSP/MCU/MPU 等相连接。
图2所示为CH375的接口电路[6]。
1.3 CAN总线接口电路设计CAN总线收发器采用82C250,并选用6N137作隔离,LPC2119的TD和RD引脚不是直接与82C250的TX、RX引脚相连,而是通过高速光耦6N137与82C250相连,这样可增强CAN总线节点的抗干扰能力,从而实现总线各节点间电气隔离。
高速光耦6N137用于保护LPC2119内部CAN总线控制器,该光耦两侧采用5 V的DC-DC电源,可使器件的VCC与VCCl完全隔离,提高系统的抗干扰能力以及节点的稳定性和安全性。
图3所示为LPC2119与CAN驱动器82C250的连接电路。
DC-DC电源模块采用B0505LS-2W,电路在图4中所示[7-8]。
图2 CH375的接口电路1.4 系统电源设计整个电路的电源由USB供电,由于LPC2119的IO电路电源要求为3.3 V,内核电路电源要求为在本应用中采用两片低压差线性温压器(LDO)1117为系统供电,如图4所示。
图3 CAN驱动器82C250的连接电路图4 DC-DC隔离电源1.5 系统PCB设计整个系统的PCB采用双面板方式设计,大小为100×120,布局及外形如图5所示。
2 固件设计本系统软件设计时采用μVision3 IDE, μVision3 IDE是一个窗口化的软件开发平台,它集成了功能强大的编辑器、工程管理器以及各种编译工具(包括C编译器、宏汇编器、链接/装载器和16进制文件转换器),通过ULINK仿真调试。
程序框架采用传统的前后台方式。
CAN控制器驱动程序包括4部分内容:CAN控制器的初始化、报文的接收、报文的发送和总线异常处理。
由于LPC2119没有开发内部读写总线,本设计在对CH375操作时使用通用I/O模拟并口读写时序,其端口定义方式如下:#defineD7_D0(uint32)(0xFF#defineCH375_CS(uint32)(1#defineCH375_A0(uint32)(1#defineCH375_WR(uint32)(1#defineCH375_RD (uint32)(1#defineCH375_RST(uint32)(1#defineCH375_INT(uint32)(1程序在使用通用I/O模拟并口读写时序对CH375的基本操作包括CPU端口初始化、向CH375写命令、向CH375写数据、从CH375读数据,其实现过程包含:初始化voidCH375_PORT_INIT( );向CH375写命令 void xWriteCH375Cmd(uint8 mCmd);向CH375写数据void xWriteCH375Data(uint8 mData);从CH375读数据uint8 xReadCH375Data(void)等4个基本函数[9-10]。
图5 PCB布局及外形3 结语本系统设计采用内置CAN控制器的LPC2119作为主控制器,CH375作为USB接口芯片,实现USB-CAN转换器,论述了LPC2119的外围电路、CAN总线驱动电路以及LPC2119与CH375之间的接口连接,并在软件给出LPC2119使用通用I/O模拟并口读写时序的方法,对LPC2119,CH375及CAN总线的实际应用具有一定的参考价值。
参考文献[1]饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2003.[2]李正军.现场总线与工业以太网及其应用系统设计[M].北京:人民邮电出版社,2006.[3]李英伟,王成儒,练秋生.USB2.0原理与工程开发版北京:国防工业出版社,2007.[4]Philips Semiconductors. LPC2119/2129/2194/2292/2294 user manual [EB/OL].[2004-05-03]..[5]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005.[6]南京沁恒电子有限公司.CH375中文说明[EB OL].[2007-08-13]..[7]Toshiba Semiconductor.6N137 IRED & PHOTO IC 数据手册[EB/OL].[1998-02-27]..[8]Philips Semiconductors. PCA82C250 CAN controller interface datasheet [EB/OL].[2000-01-13]..[9]Keil Company. LPC21XX_INSIDERSGUIDE.ZIP [CP/OL].[2005-03-21]..[10]南京沁恒电子有限公司.CH372评估板说明及相关例子程序[CP/OL].[2005-03-21]..。