利用单元平均恒虚警检测器检测雷达信号
雷达恒虚警处理设计实现

雷达恒虚警处理设计实现许金玖;束琬;彭伟【摘要】雷达信号的恒虚警(CFAR)处理是雷达信号处理的重要内容之一,本文介绍了一种基于杂波轮廓图选择的双支路处理系统,该系统从实际使用效果来看,恒虚警效果好,工作稳定,可为其它同类雷达的恒虚警设计提供参考。
【期刊名称】《电子世界》【年(卷),期】2016(000)011【总页数】2页(P108-109)【关键词】杂波轮廓图;双支路;CFAR【作者】许金玖;束琬;彭伟【作者单位】中国人民解放军空军驻中国电科第38研究所军代室;中国人民解放军空军驻中国电科第38研究所军代室;中国人民解放军空军驻中国电科第38研究所军代室【正文语种】中文恒虚警处理是雷达信号处理的基本功能之一,过多的虚警数会导致点迹处理和终端计算机饱和,影响操纵员的观察,所以恒虚警处理是必不可少的。
恒虚警处理按其处理的环境来说,可分为两大类,即在噪声环境下的恒虚警处理和在杂波环境下的恒虚警处理,选择什么样的恒虚警处理器,取决于雷达杂波的幅度统计特征。
本文介绍目前比较常用并且实现起来相对简单的双支路处理,即与MTI相参处理支路相并行,设置另一条正常处理通道,这样可以减小相参支路不必要的损失,因为强杂波环境中所必须的滤波器抑制凹口以及快门限恒虚警率处理,在弱杂波或无杂波条件下势必会导致一定程度上的检测能力降低。
因此在无杂波清洁区采用基于幅度信息的正常处理,则能够保证信号尤其是弱信号的检测概率。
为了实现对正常处理和相参处理结果的选择,必须建立一个能够反映杂波有/无的杂波图,由于它只需要提供杂波的二分层(1/0)概略信息,因此得名杂波轮廓图。
例如数字“1”表示有杂波,用来控制选择相参支路的输出;数字“0”表示无杂波,可以控制选择正常支路的输出。
所以,杂波轮廓图又名杂波开关。
本文介绍基于杂波轮廓选择的双支路处理系统,结构如图1所示:其中正常处理包括对信号进行求模值和取对数处理,之后分别送给后续做快门限(CFAR)和慢门限处理(NCFAR),其选择受信号处理控制字控制;考虑到正常处理通道处理的为清洁区,剩余杂波较少,故只采用快图。
回波检测算法
回波检测算法
以下是几种常见的回波检测算法:
- 恒虚警检测器(CFAR):是一种广泛使用的自适应阈值检测算法,能够在不同的背景噪声下保持虚警率恒定。
常见的CFAR算法有:CA-CFAR(单元平均CFAR)、GO-CFAR(最大值保护CFAR)、SO-CFAR(序列排序CFAR)等。
- 能量检测法:该方法基于目标信号在时间或频率域具有较高能量的特点。
通过计算接收信号的能量并将其与预定阈值进行比较,以检测目标是否存在。
- 高阶统计量检测:这类方法利用高阶统计特性(如偏度、峰度等)来检测目标,因为目标信号和背景噪声的高阶统计特性通常有明显差异。
- 基于模型的检测:这种方法通过对信号进行建模来区分目标信号和背景噪声。
例如,在径向速度上应用多普勒滤波器可以检测出运动目标。
- 联合检测与估计(JDE):JDE方法将目标检测与参数估计相结合,可以在检测到目标的同时估计其参数,如速度、距离等。
- 空时自适应处理(STAP):STAP是一种在空域和时域上同时进行自适应滤波的方法,能够有效抑制杂波和干扰,提高目标检测性能。
- 机器学习和深度学习方法:近年来,基于机器学习和深度学习的方法在雷达目标检测领域取得了显著的进展。
例如,支持向量机(SVM)、随机森林(RF)、神经网络(NN)和卷积神经网络(CNN)等算法已成功应用于雷达信号处理。
这些算法可以单独使用,也可以结合使用以提高检测性能。
实际应用中,需要根据具体的雷达系统、场景和目标特性来选择合适的目标检测算法。
基于卷积构型的单元平均CFAR目标检测算法

基于卷积构型的单元平均CFAR目标检测算法李健;孙光才;邢孟道;章林【摘要】提出一种基于卷积构型的单元平均恒虚警率 (convolution based cell averaging constant false alarm rate, CCA-CFAR)快速检测算法.该算法首先根据背景杂波分布模型计算待检测合成孔径雷达 (synthetic aperture radar, SAR)图像统计量矩阵,然后对单元平均恒虚警率 (cell averaging constant false alarm rate, CA-CFAR)检测器构建卷积模型,利用卷积运算实现对背景杂波的矩估计,并求出详细的背景杂波分布函数,最后根据分布函数计算出每个像素的判定阈值,并对所有待检测像素是否为目标点进行判定.该检测算法复杂度低,运算效率高,能够快速实现SAR图像实时目标检测.仿真实验证明了该方法的有效性和工程实用价值.%A fast convolution based cell averaging constant false alarm rate (CCA-CFAR) detector based on convolution for target detection in synthetic aperture radar (SAR) images is proposed in this paper. As a first step, the statistic matrices of the SAR image are computed according to the background clutter distribution model. Then, a convolution model is built for the CA-CFAR detector to realize the moment estimation, and background clutter distribution function of all pixels can be obtained. Finally, the detect threshold for each pixel is calculated to determine whether the pixel is the target point. The algorithm has the advantages of low complexity and high computational efficiency, and can achieve SAR image real-time target detection. Experimental results demonstrate the effectiveness and usefulness of the proposed algorithm.【期刊名称】《电波科学学报》【年(卷),期】2018(033)001【总页数】8页(P56-63)【关键词】合成孔径雷达(SAR);SAR图像;目标检测;CA-CFAR;矩估计【作者】李健;孙光才;邢孟道;章林【作者单位】西安电子科技大学雷达信号处理国家重点实验室, 西安 710071;西安电子科技大学信息感知技术协同创新中心, 西安 710071;西安电子科技大学雷达信号处理国家重点实验室, 西安 710071;西安电子科技大学信息感知技术协同创新中心, 西安 710071;西安电子科技大学雷达信号处理国家重点实验室, 西安 710071;西安电子科技大学信息感知技术协同创新中心, 西安 710071;西安电子科技大学雷达信号处理国家重点实验室, 西安 710071;西安电子科技大学信息感知技术协同创新中心, 西安 710071【正文语种】中文【中图分类】TN957引言目标检测作为合成孔径雷达(synthetic aperture radar, SAR)图像自动目标识别(automatic target recognition, ATR)的重要步骤,其检测性能和效率会影响SAR 成像质量[1-2],同时也决定着后续识别的精度和速度[3].恒虚警率(constant false alarm rate,CFAR)检测算法由于其稳定高效的特性,在SAR图像目标检测中受到了广泛应用[4-5].随着SAR向着高分辨宽测绘带发展[6-8],SAR图像数据量成倍地增加,如何快速有效、实时地检测目标显得尤为关键[9].大多数CFAR算法基于滑窗对SAR图像进行逐像素检测,图像中每个像素多次参与了滑窗计算,导致算法计算速度普遍不高[10-11].为了增加算法的实用性,迫切需要能够工程化应用的快速算法[12].文献[9]提出一种融合了快速预筛选和迭代计算方法的CFAR快速检测算法基本框架,提高了CFAR检测算法的执行效率;文献[13]提出一种基于G0分布的快速检测算法,利用全局阈值对整幅图像进行快速检测,但是在场景变化复杂时失配严重;文献[14]提出一种逐像素点迭代的优化方法,通过减小参考滑窗对SAR图像遍历时的重复计算量提高计算效率,但是该方法算法复杂度仍然较高.本文提出一种基于卷积构型的单元平均恒虚警率(convolution based cell averaging constant false alarm rate,CCA-CFAR)快速检测算法.该算法根据背景杂波分布模型计算待检测SAR图像统计量矩阵,通过对单元平均恒虚警率(cell averaging constant false alarm rate,CA-CFAR)检测器构建卷积模型,利用卷积计算实现传统CA-CFAR算法逐像素点滑窗估计背景杂波分布参数.该方法通过降低CA-CFAR算法的运算复杂度,减少目标检测时间,在精确得到背景杂波的分布模型参数估计的同时,快速实现SAR图像实时目标检测.本文的余下部分安排如下:第1节简单介绍了通用CA-CFAR算法的基本原理及存在的问题;第2节介绍了本文提出的CCA-CFAR算法;第3节分析了传统算法与本文算法的计算复杂度;第4节通过仿真实验验证了该算法的有效性.1 CA-CFAR检测算法及问题对于非复杂均匀场景而言,采用CA-CFAR检测器即可达到检测需求.CA-CFAR算法通过对图像中单个像素的能量与检测阈值比较来判定是否为检测目标,其自适应检测阈值根据背景杂波的分布函数和设定的虚警率计算得到.检测阈值T的计算公式为1-Pfa=p(x)dx.(1)式中:Pfa为虚警率; p(x)为背景杂波概率密度函数,不同的分布模型对应不同的背景杂波概率密度函数.而背景杂波分布模型由SAR图像场景的散射特性决定,根据均匀、非均匀、极不均匀等不同分布的SAR图像场景,学者们提出了正态分布、瑞利分布、韦布尔分布、G0分布、α稳态分布等对背景杂波进行理论建模[15-17].在确定背景杂波分布模型后,需要对分布函数的参数进行估计,目前主要的估计方法分为最大似然估计和矩估计方法.在实际应用中,通常采用计算相对简单的矩估计方法,该方法的具体思路为:当给定n个背景杂波数据,可以计算得到实际的m阶矩;在给定概率分布函数的条件下,结合m阶矩的理论值,则可得到如下一组方程:(2)式中:θ1,θ2,…,θm是分布函数中的待估计参数;xi为背景杂波数据.求解式(2)的方程组即可得到分布函数中的未知参数,从而获得该分布模型下的背景杂波概率密度函数p(x).再将p(x)代入式(1)能够求出该待检测像素的检测阈值.具体的CA-CFAR算法检测流程如图1所示,对SAR图像中一个像素点采用CA-CFAR检测器计算其所需的m阶矩,然后确定详细的背景杂波分布函数,并利用给定的恒虚警率,计算该待检测像素点的自适应检测阈值,再将该待检测像素与检测阈值进行比较,判定该像素点是否为目标点.完成一个像素点的检测后,滑动空心滑窗对下一个像素点进行阈值估计和检测,直到SAR图像中所有像素点全部完成检测.传统CA-CFAR算法估计m阶矩统计量[18]时通常采用空心滑窗逐像素点计算,如图2空心滑窗示意图所示,图中杂波数据窗大小为Pm×Pn,鉴于保护窗需要大于目标尺寸大小,保护窗大小设为Pp×Pq.则第i行第j列的待检测像素xij实际的m 阶矩为(3)根据式(3)逐像素点计算背景杂波的m阶矩时,相邻像素的背景杂波数据大量重复,因此在计算过程会涉及到大量的重复计算,导致算法运算效率不高.这严重影响了SAR图像的目标检测速度,限制了SAR图像的实时目标检测性能.图1 CA-CFAR检测算法流程图Fig.1 Flowchart of the CA-CFAR detection algorithm图2 空心滑窗示意图Fig.2 Schematic diagram of hollow sliding window 2 CCA-CFAR快速检测算法针对传统CA-CFAR检测算法计算背景杂波矩估计时,算法复杂度高且运算效率较低,本文提出一种CCA-CFAR快速检测算法.该算法首先根据背景杂波分布模型及式(2)中的待估计参数确定要计算的矩估计统计量,并得到需要计算的m阶矩估计的统计量矩阵:Um=Sm.(4)式中:S为SAR图像的能量矩阵,该SAR图像有r×l个像素.例如:经典双参数CFAR算法需要估计背景杂波能量的均值和方差,因此这里需要计算的矩估计统计量为背景杂波能量的一阶和二阶矩估计,则一阶和二阶矩估计的统计量矩阵分别为U1=S、U2=S2.传统的逐像素点统计矩估计量如式(3)所示,每个像素的m阶矩估计通过计算其杂波数据窗内的统计量矩阵数据的平均值得到,该过程可以看作SAR 图像统计量矩阵与空心滑窗函数相卷积.这里根据CA-CFAR检测器原理构建上述等效的卷积模型,则相较于传统方法需要计算每个像素点的m阶矩估计,该方法能够直接得到整个SAR图像所有像素点的背景杂波m阶矩估计:式中,w(Pm,Pn)=(6)根据卷积定理,两个函数在空间域中的卷积等于其求傅里叶变换后的乘积的逆傅里叶变换.这里对SAR图像统计量矩阵和空心滑窗权矩阵作二维傅里叶变换,将其变换到二维频域进行矩阵相乘得(7)式中,UF(r,l)、wF(Pm,Pn)分别为SAR图像统计量矩阵和空心滑窗权矩阵做二维傅里叶变换后的二维频域矩阵.对式(7)右边相乘得到的矩阵再做二维逆傅里叶变换,从而得到整个SAR图像所有像素点的背景杂波m阶矩估计,即(8)在得到所有像素的矩估计统计量后,可以根据式(2)求出分布函数中的未知参数,从而确定详细的背景杂波分布函数.最后,根据式(1)计算所有像素点的检测阈值T(x).再比较每个像素点能量值与检测阈值的大小,判断该像素是否为目标点,具体的判断表达式如下:(9)图3给出了本文CCA-CFAR快速检测算法的具体流程图,该算法完整的实现步骤如下:1)确定虚警率,根据背景杂波分布模型确定需要统计的背景杂波矩估计量,计算待检测SAR图像统计量矩阵;并根据数据窗和保护窗的大小,计算空心滑窗权矩阵.2)对SAR图像统计量矩阵和空心滑窗权矩阵补零,做二维傅里叶变换到二维频域,完成矩阵相乘后再逆傅里叶变换得到SAR图像所有像素的背景杂波矩估计统计量,并求出详细的分布模型函数.3)根据给定的虚警率以及背景杂波分布函数,计算SAR图像所有像素的自适应检测阈值.4)比较每一个待检测像素点能量值与检测阈值,判定该像素点是否为目标点,直至完成整幅SAR图像所有像素的目标检测.图3 CCA-CFAR检测算法流程图Fig.3 Flowchart of the CCA-CFAR detection algorithm3 算法复杂度分析为了证明本文所提出的CCA-CFAR快速检测算法具有更低的算法复杂度,这里对经典的双参数CFAR算法、文献[14]方法和本文算法的详细步骤进行了分析.本文算法的步骤1)、步骤3)及步骤4)与文献[14]方法及传统CA-CFAR算法具有相同的算法复杂度,这里不再对比分析.而本文算法节省的计算量来自于利用卷积计算实现传统CA-CFAR算法逐像素点滑窗统计背景杂波矩估计量,因此这里主要对比分析步骤2)(即图3虚线框中步骤)与文献[14]方法及传统CA-CFAR算法相区别的计算量.本文CCA-CFAR算法步骤2)具体分为以下四步:① 确定需要统计的背景杂波矩估计量,计算待检测SAR图像统计量矩阵,并对SAR图像统计量矩阵和空心滑窗权矩阵进行补零;② 对补零后的矩阵做二维傅里叶变换;③ 二维频域SAR图像统计量矩阵与空心滑窗权矩阵相乘;④ 对相乘后得到的矩阵做二维逆傅里叶变换.这里为了方便对比三种算法的计算量,统一规定SAR图像具有r×l个像素,滑窗大小为Pm×Pn,保护窗大小为Pp×Pq,其中r=l.上述四个步骤具体的计算量为:第一步需要统计背景杂波能量的一阶矩和二阶矩,求出统计量矩阵并对SAR图像统计量矩阵和空心滑窗权矩阵进行补零,上述操作的计算量较小,可以忽略不计;第二步需要对补零后的矩阵做二维傅里叶变换,N点一维信号傅里叶变换需要Nlb N次加法和 N次乘法,则二维傅里叶变换所需要的计算量为2N2lb N次加法和N2lb N次乘法,两个统计量矩阵做二维傅里叶变换的计算量为4N2lb N次加法和2N2lb N次乘法;第三步二维矩阵相乘的计算量为2N2次乘法;第四步二维逆傅里叶变换需要的计算量为4N2lb N次加法和2N2lb N次乘法.综合上述四个步骤,则总共需要的计算量为8N2lb N次加法和4N2lb N+2N2次乘法,假设加法和乘法的计算量相同,则总的计算量为N2(12lb N+2),其中N=r+max(Pm,Pn)-1.通过步骤2)能够得到整个SAR图像所有像素的背景杂波矩估计统计量,而后续处理步骤与传统CA-CFAR算法及文献[14]算法大致相同,这里不再赘述.传统CA-CFAR算法统计一个像素点的背景杂波一阶矩和二阶矩需要的计算量为2(PmPn-PpPq)次加法和2次乘法,则r×l个像素需要的计算量为2(PmPn-PpPq+1)r2.文献[14]方法采用了一种逐像素点迭代的优化方法,减小了参考滑窗对SAR图像遍历时的重复计算量,此方法需要的计算量大致为4(min(Pm,Pn)+min(Pp,Pq))r2.综合上述计算结果,三种算法所需的计算量如表1所示.表1 目标检测算法计算量结果Tab.1 Computation of the target detection algorithms检测方法总计算量CA-CFAR算法2(PmPn-PpPq+1)r2文献[14]方法4(min(Pm,Pn)+min(Pp,Pq))r2本文方法N2(12lbN+2)根据表1所示,文献[14]方法计算量与传统CA-CFAR算法计算量之比为(10)本文CCA-CFAR快速检测算法计算量与传统CA-CFAR算法计算量之比为(11)从式(10)可以看出,文献[14]方法采用的逐像素点迭代优化减少了重复计算量,其总计算量小于传统CA-CFAR方法计算量,能够达到提高CA-CFAR算法检测速度的目的;对比式(11),本文算法利用卷积计算对传统CA-CFAR算法的重复计算进行了优化,能够更好地提高运算效率,提升算法的目标检测速度.具体的检测速率提升倍数需要根据SAR图像、背景杂波数据窗以及保护窗的尺寸决定.下面仿真实验给出了具体性能分析.4 仿真实验为了验证本文提出的CCA-CFAR快速检测算法,这里采用机载多通道SAR杂波对消后的动目标粗聚焦图像进行目标检测仿真实验.测试数据图像大小为1 024×1 024点.分别采用传统CA-CFAR算法、文献[14]方法和本文算法检测图像中的动目标.仿真实验中采用空心滑窗方式统计背景杂波特性,考虑到SAR图像分辨率和图像中动目标尺寸,这里设置保护窗的大小为81×81,背景数据窗的大小为101×101,虚警率Pfa设为1×10-3.图4为实测数据动目标检测结果,其中,图(a)为采用传统CA-CFAR算法的检测结果图,图(b)为采用文献[14]方法的检测结果图,图(c)为采用本文算法的检测结果图.通过对比可以看出,传统CA-CFAR算法、文献[14]算法和本文算法都能够检测出图像中的动目标,且检测结果显示三种方法对动目标的检测数都为898,具有相同的目标检测性能.基于本文算法是针对CA-CFAR检测器构建卷积模型改进后的快速算法,则该算法检测器性能在均匀杂波背景下是最优的, 适用于不同分布模型下采用CA-CFAR检测器的检测算法.(a) CA-CFAR算法(b)文献[14]算法(a) CA-CFAR algorithm (b) Algorithm of literature [14](c) 本文算法(c) The proposed algorithm图4 实测数据动目标检测结果Fig.4 Moving target detection results using measured data通过上述实验可知,本文CCA-CFAR快速检测算法具有传统CA-CFAR算法相同的目标检测精度,而该算法的改进主要体现在检测速度上的提升,检测速度直接决定了目标检测算法的实用性和工程应用性,因此这里更关注该算法在目标检测速度上的性能.为了说明本文CCA-CFAR快速检测算法在检测速度上的提升,这里采用Sandia实验室的MiniSAR地面场景高分辨SAR图像数据进行目标检测仿真实验,该图像分辨率为0.1 m×0.1 m,如图5(a)所示,截取的实测SAR图像像素数为1 000×1 200点.从图中可以看出,场景右侧是一个停车场,目标为多种类型的民用车辆,车辆大小约为2 m×4 m.大部分车辆目标集中在场景右侧,场景左侧为房屋和树木,其他部分为地面.实验中,分别采用双参数CA-CFAR算法、文献[14]方法和本文算法检测图像中的目标.考虑到目标像素会干扰检测结果,实验中采用空心滑窗方式估计背景杂波统计量,并根据SAR图像分辨率和图像中目标尺寸,设置保护窗的大小为41×41,背景数据窗的大小为71×71,虚警率Pfa设为1×10-4.(a) 实测SAR图像(a) The original SAR image(b) 双参数CA-CFAR算法检测结果(b) Two-parameter CA-CFAR algorithm(c) 文献[14]方法检测结果(c) Algorithm of literature [14](d) 本文算法检测结果(d) The proposed algorithm图5 MiniSAR实测数据目标检测结果Fig.5 Target detection results with MiniSAR dataMiniSAR实测数据目标检测结果如图5(为体现各方法的检测结果对比,并没有对检测结果进行聚类),其中,图5 (a)为原始实测数据SAR图像,图5 (b)为采用双参数CA-CFAR算法的检测结果图,图5 (c)为采用文献[14]方法的检测结果图,图5 (d)为采用本文算法的检测结果图.通过对比可以看出,在场景的右侧低能量均匀地面场景区域,双参数CA-CFAR算法、文献[14]算法和本文算法具有较好的目标检测效果;在场景的左侧高能量杂波场景区域(房屋和森林),三种方法检测虚警都较高,说明了CA-CFAR类检测器在异质性杂波环境下检测性能会下降,该问题可通过采用其他类检测器进行精检测得到解决,具体针对异质性杂波环境下的目标检测算法还需进一步研究.根据目标检测结果,双参数CA-CFAR算法、文献[14]算法和本文算法对目标的检测像素数分别为2 626、2 562、2 552,其中检测出的目标像素数差异来源于边缘像素点,这三种方法都能够检测出图像中的车辆目标,因此能够认为这三种方法具有相同的检测性能.将仿真参数代入式(10)与式(11)可得,相较于双参数CA-CFAR算法,文献[14]方法可以提高检测速度约12倍,本文方法可以提高检测速度约60倍.实验结果如下,双参数CA-CFAR算法检测用时105.32s,文献[14]算法用时7.51 s,本文算法用时0.93 s(仿真环境:MATLAB2016a,CPU I7 3.4 GHz,4 GB RAM).实验结果与理论值基本相同,说明了本文算法在目标检测性能与传统CA-CFAR算法相同的情况下,提高了算法运算效率,大大缩短了目标检测时间.为了进一步说明本文算法的快速检测性能,这里对不同数据大小的SAR图像进行目标检测仿真实验.仿真中分别对256×256点、512×512点、1 024×1 024点、2 048×2 048点、4 096×4 096点、8 192×8 192点的SAR图像进行目标检测.图6给出了完成目标检测所需的时间,鉴于检测时间呈几何级增长,此处采用对数时间作为时间刻度.从图中可以看出,本文算法对于256×256点、512×512点、1 024×1 024点及2 048×2 048点SAR图像能够数秒内得到检测结果,对于4 096×4 096点和8 192×8 192点的多像素数SAR图像也能够实现数十秒内获得检测结果.在此仿真实验参数下,文献[14]方法相比双参数CA-CFAR方法所需的检测时间减小了一个数量级,而本文方法相比文献[14]方法所需检测时间又减小了近一个数量级,具有最快的检测速度和最优的检测效率.综上所述,本文方法通过降低算法复杂度大大降低了目标检测时间,提高了目标检测速度,能够快速实现SAR图像实时目标检测.图6 不同像素数SAR图像目标检测所用时间Fig. 6 Target detection time of SAR images with different pixels5 结论本文提出了一种CCA-CFAR快速检测算法,该算法首先根据背景杂波分布模型计算待检测SAR图像统计量矩阵,然后对CA-CFAR检测器构建卷积模型,利用卷积运算实现传统CA-CFAR算法逐像素点滑窗计算背景杂波矩估计统计量,并确定详细的背景杂波分布函数.最后根据分布函数计算出每个像素的检测阈值,并对所有待检测像素是否为目标点进行判定.该方法降低了CA-CFAR检测算法的算法复杂度,可用于图像目标快速预检测,且适用于不同分布模型下所有采用CA-CFAR检测器的目标检测算法.参考文献[1] LI X S, XING M D, XIA X G, et al. Simultaneous stationary scene imaging and ground moving target indication for high-resolution wide-swath SAR system[J]. IEEE transactions on geoscience and remote sensing, 2016, 54(7): 4224-4239.[2] BAUMGARTNER S V, KRIEGER G. Simultaneous high-resolution wide-swath SAR imaging and ground moving target indication: processing approaches and system concepts[J]. IEEE journal of selected topics in applied earth observations and remote sensing, 2015, 8(11): 5015-5029. [3] 宋文青,王英华,刘宏伟. 高分辨SAR图像自动区域筛选目标检测算法[J]. 电子与信息学报,2016,38(05):1017-1025.SONG W Q, WANG Y H, LIU H W. An automatic block-to-block censoring target detector for high resolution SAR image[J]. Journal of electronics & information technology, 2016, 38(05): 1017-1025. (in Chinese)[4] 李庆忠, 李瑞芹, 黎明, 等. 基于时频分析的高频地波雷达目标检测算法[J]. 电波科学学报,2015,30(5):943-950.LI Q Z, LI R Q, LI M, et al. A target detection algorithm of HFSWR based on time-frequency analysis[J]. Chinese journal of radio science, 2015, 30(5): 943-950. (in Chinese)[5] YANG X L, WEN G J, MA C H, et al. CFAR detection of moving range-spread target in white Gaussian noise ssing waveform contrast[J]. IEEE Geoscience and remote sensing letters, 2016, 13(2): 282-286.[6] WIESBECK W, SIT L, YOUNIS M, et al. Radar 2020: the future of radar systems[C]//2015 IEEE International geoscience and remote sensing symposium, Milan, 2015: 188-191.[7] BISCEGLIE M D, GALDI C. CFAR detection of extended objects in high-resolution SAR images[J]. IEEE transactions on geoscience and remote sensing, 2005, 43(4): 833-843.[8] YU W Y, WANG Y H, LIU H W, et al. Superpixel-based CFAR target detection for high-resolution SAR images[J]. IEEE Geoscience and remote sensing letters, 2016, 13(5): 730-734.[9] 赵明波, 何峻, 付强. SAR图像CFAR检测的快速算法综述[J]. 自动化学报, 2012, 38(12): 1885-1895.ZHAO M B, HE J, FU Q. Survey on fast CFAR detection algorithms for SARimage targets[J]. Acta automatica sinica, 2012, 38(12): 1885-1895. (in Chinese)[10] 高贵, 周蝶飞, 蒋咏梅, 等. SAR图像目标检测研究综述[J]. 信号处理, 2008,24(6): 971-981.GAO G, ZHOU D F, JIANG Y M, et al. Study on target detection in SAR image: a survey[J]. Signal processing, 2008, 24(6): 971-981. (in Chinese) [11] AALO V A, PEPPAS K P, EFTHYMOGLOU G. Performance of CA-CFAR detectors in nonhomogeneous positive alpha-stable clutter[J]. IEEE transactions on aerospace and electronic systems, 2015, 51(3): 2027-2038.[12] 任磊, 陈辉, 陈建文, 等. 基于DSP的二维CFAR检测快速实现[J]. 系统工程与电子技术, 2009, 31(7): 1627-1631.REN L, CHEN H, CHEN J W, et al. Implementation of two-dimensional CFAR detection based on DSP[J]. Systems engineering and electronics, 2009,31(7): 1627-1631. (in Chinese)[13] 贺志国, 周晓光, 陆军, 等. 一种基于G0分布的SAR图像快速CFAR检测方法[J]. 国防科技大学学报, 2009, 31(1):47-51. (in Chinese)HE Z G, ZHOU X G, LU J, et al. A fast CFAR detection algorithm based on the G0 distribution for SAR images[J]. Journal of National University of Defense Technology, 2009, 31(1):47-51. (in Chinese)[14] GAO G, LIU L, ZHAO L J, et al. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images[J]. IEEE transactions on geoscience and remote sensing, 2009, 47(6): 1685-1697.[15] ANASTASSOPOULOS V, LAMPROPOULOS G A. Optimal CFARdetection in Weibull clutter[J]. IEEE Transactions on aerospace and electronic systems, 1995, 31(1): 52-64.[16] LIAO M S, WANG C C, WANG Y, et al. Using SAR images to detect ships from sea clutter[J]. IEEE Geoscience and remote sensing letters, 2008, 5(2): 194-198.[17] FRERY A C, MULLER H J, YANASSE C C F, et al. A model for extremely heterogeneous clutter[J]. IEEE transactions on geoscience and remote sensing, 1997, 35(3): 648-659.[18] GALUSHKO V G. Analysis of the CA CFAR algorithm as applied to detection of stationary Gaussian signals against a normal noise background[C]//2016 International Kharkiv symposium on physics and engineering of microwaves. Kharkiv, 2016: 1-3.。
恒虚警问题研究

长 春 工 业 大 学 学 报( 自然 科 学 版 )
c h u n Un i v e r s i t v o f Te c h n o l o g y( Na t u r a l S c i e n c e E d i t i o n )
n e i g h b o r i n g c e l l a v e r a g i n g CFAR ( CA— CF AR) .W e p u t f o r wa r d a n i mp r o v e d CFAR a l g o r i t h m . Th e
d e t e c t i on p e r f o r ma n c e s o f t h e f i v e pr o c e s s or s a r e c o mp a r e d wi t h c o mpu t e r s i mul a t i o n,a nd t h e r e s u l t s s ho w t ha t t he l o g a r i t hmi c m e a n f a l s e a l a r m c i r c ui t s DA HENG e l e c t i on i s o pt i ma l u nd e r t he c o m pl i c a t e d c l u t t e r e nv i r o nme nt s whi l e t he o t he r s h a v e t he i r o wn a d v a nt a ge s . Key wor d s:CFAR ( Cons t a nt Fa l s e Al a r m Ra t e );c l u t t e r;CFAR p r oc e s s i n g t e c hn ol og y;de t e c t l os s .
雷达信号处理技术及仿真

雷达信号处理技术及仿真任新涛;张宏伟;田蛟;潘刚【摘要】The process of radar signal processing was simulated by Matlab software, from which the simulation graph can make us have a visualized understanding on the process of radar signal processing, and reflect the convenience and quickness of Matlab software in radar signal processing and simulation. In addition, the current status, shortages and development trend of current radar constant false alarm rate (CFAR) detection technology are elaborated. Through improving simulated annealing (SA) , an optimal threshold constant false alarm rate detection algorithm which can effectively select detection threshold in the process of constant false alarm rate detection is put forward. The constant false alarm rate detection performance of the radar system can be improved, and a certain reference value on the development of constant false alarm rate can be gained.%在此借助Matlab软件对雷达信号处理过程进行仿真,从仿真图形直观地理解雷达信号处理过程,也体现了Matlab软件在雷达信号处理仿真中的方便、快捷等优点.另外,对当今雷达恒虚警检测技术的现状、不足及其发展动态进行了论述,并通过改进模拟退火算法,提出了一种最优门限恒虚警检测算法.该算法能够在恒虚警检测过程中有效地选取检测门限,提高了雷达系统的恒虚警检测性能,对恒虚警发展具有一定的参考价值.【期刊名称】《现代电子技术》【年(卷),期】2012(035)003【总页数】4页(P8-10,14)【关键词】Matlab;雷达信号处理;恒虚警;模拟退火;门限【作者】任新涛;张宏伟;田蛟;潘刚【作者单位】军械工程学院研究生管理大队学员三队,河北石家庄050003;军械工程学院研究生管理大队学员三队,河北石家庄050003;军械工程学院光学与电子工程系,河北石家庄050003;军械工程学院光学与电子工程系,河北石家庄050003【正文语种】中文【中图分类】TN95-34现今雷达系统所处的电磁环境日益复杂,相应出现的目标检测方法也越来越多。
雷达信号处理的算法优化研究

雷达信号处理的算法优化研究雷达作为一种重要的探测和监测工具,在军事、航空航天、气象、交通等领域发挥着关键作用。
而雷达信号处理是从接收到的雷达回波中提取有用信息的关键环节,其算法的优劣直接影响到雷达系统的性能。
随着技术的不断发展,对雷达信号处理算法的优化成为了一个重要的研究方向。
一、雷达信号处理的基本原理雷达通过发射电磁波并接收目标反射的回波来获取目标的信息。
接收到的回波信号包含了目标的距离、速度、方向、形状等特征,但这些信息往往被噪声和干扰所掩盖。
雷达信号处理的任务就是通过一系列的算法对回波信号进行滤波、检测、参数估计等操作,以提取出有用的目标信息。
在雷达信号处理中,常用的算法包括脉冲压缩、动目标检测(MTD)、恒虚警检测(CFAR)等。
脉冲压缩用于提高距离分辨率,MTD 用于检测运动目标,CFAR 则用于在复杂的杂波环境中保持恒定的虚警概率。
二、现有雷达信号处理算法存在的问题尽管现有的雷达信号处理算法在一定程度上能够满足实际应用的需求,但仍然存在一些不足之处。
首先,计算复杂度较高。
一些复杂的算法在处理大量数据时需要消耗大量的计算资源和时间,这在实时性要求较高的应用场景中可能会导致性能下降。
其次,对复杂环境的适应性不足。
在实际应用中,雷达往往面临着多径传播、杂波干扰、目标遮挡等复杂情况,现有的算法在处理这些复杂环境时可能会出现误判或漏判。
再者,算法的精度和分辨率还有提升的空间。
对于一些对精度要求较高的应用,如精确制导、气象预报等,现有的算法可能无法满足需求。
三、雷达信号处理算法优化的目标和思路算法优化的目标主要包括提高处理速度、增强适应性、提高精度和分辨率等。
为了实现这些目标,可以从以下几个方面入手。
(一)算法改进对现有的算法进行改进是一种常见的优化思路。
例如,通过优化脉冲压缩算法的编码方式,可以在不增加计算复杂度的前提下提高距离分辨率;对 MTD 算法中的滤波器设计进行优化,可以增强对运动目标的检测能力。
cfar检测原理

cfar检测原理CFAR(Constant False Alarm Rate,恒定虚警率)检测是一种用于雷达信号处理的算法,其目的是在不知道目标信号统计特性的情况下,自适应地检测雷达回波信号中的目标。
CFAR检测算法可以在背景噪声变化的情况下始终保持一个恒定的虚警率,因此在雷达信号处理中被广泛使用。
CFAR检测方法的核心思想是:先对雷达接收信号进行预处理,通过计算背景噪声的统计特性,获得一个适当的阈值值。
在此基础上,将阈值与接收到的信号进行比较,如果信号超过阈值,则被判定为目标信号。
CFAR检测算法的关键是如何确定阈值。
CFAR检测算法中常用的阈值确定方法有两种:一种是基于固定数量的参考背景噪声的方法,另一种是基于可调整的参考背景噪声的方法。
基于固定数量的参考背景噪声的方法中,首先需要选择一个参考窗口,该参考窗口中的背景噪声被认为是与待检测目标无关的信号。
通过在参考窗口中选取一定数量的背景噪声,则可以计算出一个固定的阈值。
然后将该阈值应用到整个雷达接收信号中,以检测其中的目标信号。
基于可调整的参考背景噪声的方法中,算法会根据信号的统计特性自适应地调整阈值。
具体来说,首先需要选取一个参考窗口,然后计算该窗口中信号的均值和方差。
然后,根据选择的虚警率,可以计算出一个调整因子。
最后,通过将调整因子乘以信号均值和方差,得到一个适当的阈值。
该方法可以更加准确地检测目标信号,但是计算量较大,所以使用较少。
总的来说,CFAR检测算法是一种自适应的雷达信号处理方法,其优点是能够在不知道目标信号统计特性的情况下,自适应地检测雷达回波信号中的目标。
其主要应用领域包括航空航天、无人机、车载雷达、雷达导航等。
基于FPGA的自适应恒虚警检测器研究

总第170期2008年第8期 舰船电子工程S hi p E lectronic Engineering V ol .28N o .8 95 基于FPGA 的自适应恒虚警检测器研究3杨大磊1) 陈 玺1) 赵润山2) 陈湘凭1)(武汉数字工程研究所1) 武汉 430074)(武汉军械士官学校2) 武汉 430075)摘 要 雷达目标检测系统中,由于回波中的杂波与噪声严重影响着系统的检测性能,为在一定的虚警率下提高系统的检测概率,提出一种基于删除单元平均恒虚警(CFA R,const ant fa lse alarm rate )检测器的多分层判决门限方法。
并由此原理设计出自适应CFA R 检测器,与传统的恒虚警检测器相比,明显地改善了系统的适应性和检测性能。
关键词 雷达目标检测;恒虚警;门限中图分类号 TN 95Research on Self -adap tive CF AR Checker B ased on FPGAY ang D alei 1) C hen X i 1) Zhao Ru nsh an 2) Ch en X iangp ing1)(W uhan D igita l Enginee ring Institut e 1),W uhan 430074)(W uhan O rdnance N.C.O.A cade m y of PL A 2),W uhan 430075)A b s tra c t In the rada r ta rget checking system,because the c l uster and noise in the echoes can se riously affec t the checking pe rfor m ance of the syste m ,t his pape r proposes a judg m ent threshold m e thod based on the de leted unit m ean constant false alarm ra t e checker,w hich has ca rried out the quantization correcti on seg m ent -by -seg m ent,in orde r to i m prove the checking proba 2bility of the syst em under ce rtain false a lar m rate.A nd the self -adapti ve CFA R checke r has been desi gned according to t his prin 2ciple,w hich has evidentl y i mp roved the adaptability and checking pe rfor m ance of the syste m ,co mpa red t o the traditiona l constant fa l se ala r m rate checker .Ke y w o rd s radar targe t check,constant false alarm rate,threshold C l a s s N um be r TN 951 引言雷达自动检测处理的目的是在感兴趣的辨识单元中自动检测目标回波,提供目标报告。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用单元平均恒虚警检测器检测雷达信号
摘要:恒虚警方法就是采用自适应门限代替固定门限,而且此自适应门限能随着被检测点的背景噪声、杂波和干扰的大小自适应地调整。
在杂波背景下,由于信号是非同态的,有时还是时变的,所以采用单元平均恒虚警检测器检测雷达信号。
关键字:雷达信号检测恒虚警概率检测概率
0 引言
在现代雷达信号处理中,为了提高雷达的性能,首先需要提高检测器输入端的信噪比及信干比,其措施是降低接收机的噪声系数,采用各种抑制杂波和抗干扰的措施等。
但是即使采用了上述方法,检测器输入端还会有噪声、杂波和干扰的剩余分量。
由于接收机内部噪声电平因模拟器件的影响而缓慢时变,杂波和干扰剩余也是时变的,且在空间非均匀分布,所以仍需要采用各种恒虚警方法来保证雷达信号检测具有恒虚警特性。
杂波在空间的分布是非同态的,有些还是时变的,不同区间的杂波强度也有大的区别。
因而杂波背景下的恒虚警检测器与噪声背景下的恒虚警检测器有着明显的差别,其杂波的平均值只能通过被检测点的邻近单元计算得到。
所以采用单元平均恒虚警检测器。
1 恒虚警检测的概述
目前常用的雷达信号的恒虚警处理分为两大类,即噪声环境的恒虚警处理和杂波环境的恒虚警处理。
噪声环境的恒虚警处理适用于热噪声环境。
杂波环境的恒虚警处理既适用于热噪声环境,也适用于杂波干扰环境。
由于杂波环境的恒虚警处理存在恒虚警损失,所以目前的雷达信号恒虚警处理一般都有两种处理方式,根据干扰性质自动转换。
横虚警率处理器主要有两个性能指标:(1)恒虚警率性能,表明了恒虚警率处理器在相应的环境中实际所能达到的恒虚警率情况;(2)恒虚警率损失,雷达信号经过恒虚警率处理后,为了达到原信号的检测能力所需的信噪比的增加量。
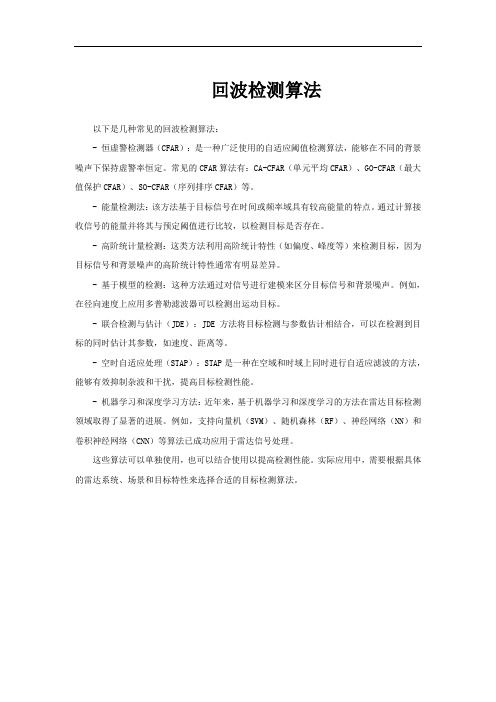
2 单元平均恒虚警检测器的原理
将输入信号i x 送到由()21L +个延迟单元构成的延迟线上,检测单元D 的两侧各L 个单元为参考单元。
将所有参考单元中的x 值求和后再除以2L 就可以得
到被检测单元处杂波背景的均值估计ˆμ。
检测门限0ˆU K μ=,当调整门限乘子K 的大小时,可以改变门限0U 的大小,从而控制了虚警率的大小。
原理图如下:
被检测单元xd
图2.1 单元平均恒虚警检测器
3 单元平均恒虚警检测器的性能分析
如图2.1所示,2L 个参考单元构成了计算均值估计ˆμ
用的数据窗,在每次雷达发射脉冲后,接收的所有回波数据将从这个数据窗依次滑过,由于参考单元
数目有限,均值估计ˆμ会有一定起伏。
参考单元数越少,均值估计ˆμ
的起伏越大。
为了保持同样的虚警率,必须适当提高门限(调整K 值)。
但门限值的提高将降低发现概率,所以需要增加信噪比以保持指定的发现概率。
此时为了达到指定的恒虚警要求就需要额外增加信噪比,即恒虚警损失。
恒虚警损失的计算步骤是根据参考单元的数目M 和指定的恒虚警率f P ,求得发现概率与输入信噪比的关系,就可计算得到恒虚警损失。
恒虚警损失以符号
CFAR L 表示,其定义为
()
()
,f d
CFAR P P R N L R =
∞ (3.1)
式中,()R N 表示在一定f P 、d P 下,参考单元数目为N 时所需的信噪比;()
R ∞
表示在同样的f P 、d P ,参考单元N →∞的情况,所需的信噪比。
恒虚警损失不但与参考单元数有关,还与检测前的脉冲积累数N 和目标起伏情况有关。
表3-1中列出了高斯杂波背景下目标无起伏、目标起伏为斯伟林情况1和斯伟林情况2三种情况下的恒虚警损失。
由表3-1可见,参考单元数值越大,恒虚警损失就越小;脉冲积累数越大,恒虚警损失也就越小。
当脉冲积累数大于10以后,只要参考单元数值大于3,恒虚警损失就可以降到2dB 以下。
而且脉冲积累数受限于雷达波束内可能接收到的回波脉冲数。
但参考单元数值也不能太大,因为杂波在空间分布是同态的,即使同一种杂波在不同距离和方位上也有所不同,参考单元数值太大,会使均值估计难以适应杂波在空间的非同态分布的变化。
表3-1 6
10f P -=时,CA-CFAR 检测器的恒虚警损失CFAR L
4 结论
从对恒虚警检测器的性能分析中,可以知道恒虚警损失在雷达信号检测中是非常重要的。
同一f P 、d P 下,参考单元数、积累脉冲数不同,恒虚警损失不同。
L也很小,可以忽略,而认为无恒虚警损失。
此即使M=1,当N超过100时,
CFAR
外积累能降低恒虚警损失。
这是由于积累起到了平均的作用,可以降低干扰幅度的起伏,使虚警概率的起伏变小。
并且积累数目M越大,损失越小。
5 参考文献
[1] 赵树杰.信号检测与估计理论.西安:西安电子科技大学出版社,2001.
[2] 景占荣,羊彦.信号检测与估计.北京:化学工业出版社.2004.
[3] 吴顺君,梅晓春.雷达信号处理和数据处理技术.北京:电子工业出版
社.2008.
[4] 丁鹭飞,耿富录.雷达原理.第三版. 西安:西安电子科技大学出版社,2002.。