牛头刨床执行机构及部件设计
机械原理第十二章课后答案

第12章其他常用机构12-1棘轮机构除常用来实现间歇运动的功能外,还常用来实现什么功能?答:棘轮机构除了常用的间歇运动功能外,还能实现制动、进给、转位、分度、趙越运动等功能。
12-2某牛头刨床送进丝杠的导程为6mm,要求设计一棘轮机构,使每次送进呈可在0.2〜之间作有 级调整(共6级)。
设棘轮机构的棘爪由一曲柄摇杆机构的摇杆来推动,试绘出机构运动简图,并作必姜的计算 和说明。
解:牛头刨床送进机构的运动简图如图12-1所示,牛头刨床的横向进给是通过齿轮1、2,曲衲摇杆机构2、 3、4,練轮机构4、5、7来使与棘轮固连的丝杠6作间歇转动,从而使牛头刨床工作台实现横向间接进给。
通过 改变曲柄长度刃的大小可以改变进给的大小。
当棘爪7处于图示状态时,棘轮5沿逆时针方向作间歇进给运 动。
若将棘爪7拔出绕自身轴线转180°后再放下•由于棘爪工作面的改变.棘轮将改为沿顺时针方向间接进给。
G=^X360° = 12°O棘轮的齿数为360° 360° “0 12°设牛头刨床横向进给的初始位置如图12-1 (a)所示,则曲柄摇杆机构0。
2皿的极限位置为初始位置左右 转0/2,其中0为摇杆的摆角,极限位置如图12-1 (b)所示。
半-次进给量为0.2mm 时,帀为虽短,即得棘轮最小转角.2久 2穴 rac0 =〒仏二石".2 = 72。
每次送进量的调整方法:① 采用隐蔽棘轮罩来实现送进駅的调格:② 通过改变棘爪摆角來实现送进就的调整。
当一次进给虽为\.2tnm 时 即得棘轮最人转角当进给最为0.2/n/n 时,棘轮每次转过的角度为=—x0.2 = 6图(a)中所示,三个楝爪尖在練轮齿圈上的位置相互磅个齿風图(b)中所示,三个棘爪尖在練轮齿圈上的位買相互差I个齿距。
(a) (b)图12-212-4当电钟电压不足时,为什么步进式电钟的秒针只在原地震荡,而不能作整周回转?答:如图12-3所示为用于电钟的棘轮机构。
机械设计 第1章 平面机构及其运动简图

第一章平面机构及其运动简图案例导入:通过硬纸片是否钉在桌面上及常见的推拉门、活页等例子,引入自由度、铰链、铰接、约束条件和运动副、运动链、机构等概念,介绍运动副的分类;以牛头刨床为例子导入运动简图,介绍用简单的符号和图形表示机器的组成和传动原理。
第一节平面运动副一、平面运动构件的自由度平面机构是指组成机构的各个构件均平行于同一固定平面运动。
组成平面机构的构件称为平面运动构件。
两个构件用不同的方式联接起来,显然会得到不同形式的相对运动,如转动或移动。
为便于进一步分析两构件之间的相对运动关系,引入自由度和约束的概念。
如图1-1所示,假设有一个构件2,当它尚未与其它构件联接之前,我们称之为自由构件,它可以产生3个独立运动,即沿x方向的移动、沿y方向的移动以及绕任意点A的转动,构件的这种独立运动称为自由度。
可见,作平面运动的构件有3个自由度。
如果我们将硬纸片(构件2)用钉子钉在桌面(构件1)上,硬纸片就无法作独立的沿x或y方向的运动,只能绕钉子转动。
这种两构件只能作相对转动的联接称为铰接。
对构件某一个独立运动的限制称为约束条件,每加一个约束条件构件就失去一个自由度。
图1-1 自由构件二、运动副的概念机构是具有确定相对运动的若干构件组成的,组成机构的构件必然相互约束,相邻两构件之间必定以一定的方式联接起来并实现确定的相对运动。
这种两个构件之间的可动联接称为运动副。
例如两个构件铰接成运动副后,两构件就只能绕轴在同一平面内作相对转动,称为转动副,见图1-2a)、b)所示。
又如图1-2d)所示,一根四棱柱体1穿入另一构件2大小合适的方孔内,两构件就只能沿轴线X作相对移动,称之为移动副;图1-2c)所示为车床刀架与导轨构成的移动副。
我们日常所见的门窗活叶、折叠椅等均为转动副,推拉门、导轨式抽屉等为移动副。
图1-2 平面低副三、运动副的分类两构件只能在同一平面作相对运动的运动副称为平面运动副。
构成运动副的点、线或面称为运动副元素,根据运动副元素的不同,平面运动副可分为低副和高副。
机械原理与机械设计 (上册) 第4版 第1章 机械的组成、分类与发展

间歇运动机构
变速回转 往复摆动 往复移动 间歇运动
连杆机构
特定轨迹
别控各是制部随控装分着制置的2理0的运世论作动纪的用。后发是半展控叶和制以计机来算器现机代在科工学业技上术的的应发用展,,机特器
的组成更复杂了。
传 感 器
发出指 驱动装置
令调节
传动装置
传
执行装置
感
器
伺服电 机的运 动
都是实现运动形式的变换。 它们都属于连杆机构。
凸轮机构、齿轮机构和棘轮机构实现 的运动转换与连杆机构不同,构件之 间的连接形式也不同,构件的形状也 不同。
因此,可给出机构的如下定 义: 机构: 人为实物的组合体, 具有确定的机械运动, 可以用来传递和转换运动。
机器:
人为实物的组合体, 具有确定的机械运动, 可以用来转换能量、
驱动装置
传动装置
执行装置
将原动机的运动和动力传递给执行装置, 并实现运动速度和运动形式的转换。
运动速度的转换
运动形式的转换
运动速度的转换
传动装置解决原动机速度和执行装置速度不匹配的问题。
一般的普通交流电动机速度是固定的。
一般机器执行部分速度低于原动机的转速, 需要减速。
鼠笼式 交流电动机的
同步转速 (r/min)
返回
机器中的几个基本概念
什
么
机构
是
在认知机器的实践中,我们已经初步认识了
机 构
几种机构:
呢
?
连杆机构、凸轮机构、
棘轮机构、螺旋机构、齿轮机构
内燃机
连杆机构 活塞的往复移动
曲轴的转动
牛头刨床
圆盘的转动
连杆机构
滑枕的往复移动
RPR-RPP

RPR-RPP六杆机构的动力学仿真作者:伍英来源:《科技创新导报》2011年第29期摘要:为了研究RPR-RPP六杆机构的工作过程,便于RPR-RPP六杆机构的设计、改进和使用,在ADAMS中建立了RPR-RPP六杆机构的三维工作模型,对ADAMS中模型的各部分进行了设置,对RPR-RPP六杆机构工作过程进行了仿真分析,对RPR-RPP六杆机构结构参数进行了优化研究。
关键词:RPR-RPP六杆机构三维建模仿真中图分类号:TH122 文献标识码: A 文章编号:1674-098X(2011)10(b)-0000-00牛头刨床是一种常见的金属切削机床,RPR-RPP六杆机构应用于牛头刨床的执行机构,实现将回转运动转变为直线往复运动的重要功能,RPR-RPP六杆机构对牛头刨床的工作性能起着非常关键作用;随着计算机技术的发展,在机构设计中计算机辅助设计得到了迅猛发展,特别为其建模仿真提供了极大的方便[1],以往的文献对其作了许多分析和研究[2-7];为了对RPR-RPP六杆机构的优化设计打下基础,有必要分析RPR-RPP六杆机构的结构和工作原理,建立RPR-RPP六杆机构虚拟样机,并对其工作过程进行仿真和优化;为对其进一步深入研究提供了基础。
1 RPR-RPP六杆机构的结构及工作机理牛头刨床实现刨头切削运动的六杆机构是一个关键机构,RPR-RPP六杆机构结构简图如图1所示。
由曲杆1、滑块2、摆动导杆3、滑块4、执行构件5、机架6等组成。
曲杆1、滑块2、摆动导杆3构成摆动导杆机构,由曲柄1作为原动件做圆周运动,带动滑块2作圆周运动;滑块2沿摆动导杆3滑动,带动摆动导杆3左右摆动;摆动导杆3带动滑块4左右摆动;滑块4在执行构件5上作上下滑动,带动执行构件5左右移动。
执行构件5左行时,刨刀进行切削,称工作行程;执行构件5右行时,刨刀不工作,称空行程。
通过ADAMS仿真及优化,为提高牛头刨床的工作质量提供了新的设计思路和方法。
牛头刨床刨刀的往复运动机构

机械原理课程设计令狐采学计算说明书课题名称:牛头刨床刨刀的往复运动机构姓名:院别:工学院学号:专业:机械设计制造及其自动化班级:机设1201指导教师:2014年6月7日工学院课程设计评审表目录一.设计任务书 (4)1.1 设计题目 (4)1.2 牛头刨床简介 (4)1.3 牛头刨床工作原理 (4)1.4 设计要求及设计参数 (6)1.5 设计任务 (7)二.导杆机构的设计及运动分析 (8)2.1 机构运动简图 (8)2.2 机构运动速度多边形 (9)2.3 机构运动加速度多边形 (11)三.导杆机构动态静力分析 (14)3.1 静态图 (14)3.2 惯性力及惯性力偶矩 (14)3.3 杆组拆分及用力多边形和力矩平衡求各运动反力和曲柄平衡力 (15)心得与体会 (21)参考文献 (22)一、设计任务书1.1 设计题目:牛头刨床刨刀的往复运动机构1.2 牛头刨床简介:牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批牛头刨床外形图量生产。
为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。
刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。
1.3 牛头刨床工作原理:牛头刨床是一种刨削式加工平面的机床,图1所示为较常见的一种机械运动的牛头刨床。
电动机经皮带传动和两对齿轮传动,带动曲柄2和曲柄相固结的凸轮转动,由曲柄2驱动导杆2-3-4-5-6,最后带动刨头和刨刀作往复运动。
当刨头右行时,刨刀进行切削,称为工作行程。
当刨头左行时,刨刀不切削,称为空回行程。
当刨头在工作行程时,为减少电动机容量和提高切削质量,要求刨削速度较低,且接近于匀速切削。
在空回行程中,为节约时间和提高生产效率,采用了具有急回运动特性的导杆机构。
牛头刨床主运动机构的运动学分析方法研究
ADAMS 进行运动学、动力学分析,来测试和评估牛头刨床工
作过程中的性能[1]。通过采用虚拟样机技术,可以短周期、低成
本地完成传统物理样机开发模式所必需的全部过程,因此,对
牛头刨床虚拟样机的研究具有重要的实际意义。
将在 UG 中装配好的
摆动导杆+偏置曲柄滑块
机 构 导 出 为 Parasolid 文
(Shenzhen CIMC-TianDa Airport Support Co. Ltd., Shenzhen 518000, China)
揖摘 要铱通过分析牛头刨床的工作特点,确定其主运动机构的设计方案,运用 UG 软件建模装配,导入 ADAMS 进行分析,并与运
用 MATLAB 得出的理论分析结果比较,分析两者之间的不同,从而对牛头刨床主运动机构的设计与改进提供一定的帮助。
obtained by MATLAB, the differences between the two are analyzed, so as to provide some help for the design and improvement of the main
motion mechanism of the shaper. 揖关键词铱牛头刨床;摆动导杆 + 偏置曲柄滑块;ADAMS;MATLAB
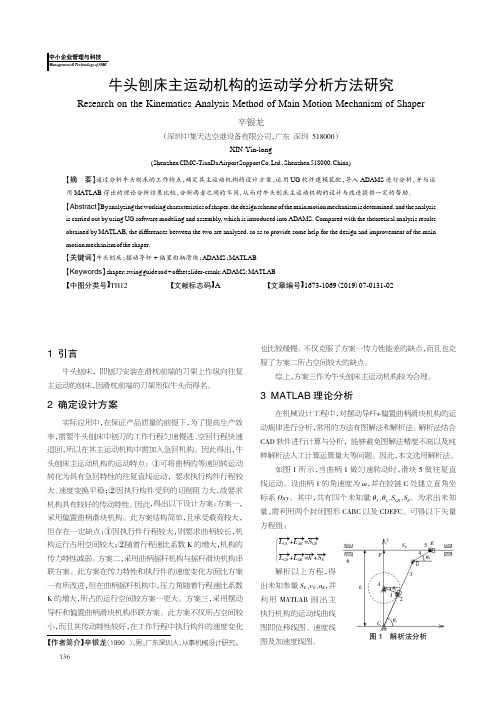
方程组:
嗓 LCA +LAB =SCB
LCD +LDE =h +SE
6
解析以上 方 程,得
出未知参量 SE、vE、aE,并
h
利 用 MATLAB 画 出 主
y F
SE
5E
4 兹4
3 A
兹1 1
2
执行机构的运动线曲线 图即位移线图、速度线 图及加速度线图。
机械设计基础I 牛头刨床 说明书
机械设计基础I课程设计说明书设计题目:牛头刨床传动机构设计及其运动分析延陵学院班级06机Y3学号06123127设计者张小丹指导教师黄秀琴2009年2月设计目录1.机构运动简图及原始数据和要求 (3)2.设计过程及主要计算结果 (4)3.计算原程序及注释 (4)4.程序运行结果及图表分析 (6)5.运行结果的图表分析 (7)6.图解法检验 (8)7.小结 (9)8.参考文献 (10)(1)机构运动简图及原始数据和要求:牛头刨床传动机构示意图:原始数据:(2)设计过程及主要计算结果:由K=(180°+θ)/(180°-θ)=1.65 得:θ=180°·(K-1)/(K+1)=44.15°由α=(180°-θ)/2=67.92°及cosα= O2A/O2O3 得:O2A=131.54㎜由sin(90°-α)=0.5H/O3B 得:O3B=665.20㎜又由机构分析得S=-Lo3b*sin(j2)w1=2*PI*n1/(60)w2=w1*z1/z2w3=Lo2a*w2*cos(j1-j2)/Lo3aV=-w3*Lo3b*cos(j2)Va=-Lo2a*w2*sin(j1-j2)aj=-(2*Va*w3+Lo2a*w2*w2*sin(j1-j2))/Lo3aat=Lo3b*aj*cos(j2)an=Lo3b*w3*w3*sin(j2)a=an-at可得出机构刨刀滑枕位移s速度v及加速度a。
(3)计算原程序及注释:#include <math.h>#include <stdio.h>#define PI 3.1415926int i;floatn1=230,m=6,z1=15,z2=55,L1=176,H=500,K=1.65,L2=360,Lo23=350,Lo3b=665.20,Lo2a=131.54 ;/*定义参数*/float j1,j2,tanj2,S,Lo2a,Lo3b,Lo3a,w1,w2,w3,V,Va,aj,at,an,a;/*定义变量(这里设O3A与Y轴夹角为角1,O3A与Y轴夹角为角2)*/PRINT(float j1){ FILE *fp;fp=fopen("d:\\NTB5.txt","a");tanj2=(Lo2a*sin(j1))/(Lo23+Lo2a*cos(j1));j2=atan(tanj2); /*求解角2*/Lo3a=sqrt((Lo23+Lo2a*cos(j1))*(Lo23+Lo2a*cos(j1))+(Lo2a*sin(j1))*(Lo2a*sin(j1)));S=-Lo3b*sin(j2);w1=2*PI*n1/(60);w2=w1*z1/z2;w3=Lo2a*w2*cos(j1-j2)/Lo3a; /*求解O1.O2.O3角速度*/V=-w3*Lo3b*cos(j2); /*求解刨刀速度*/Va=-Lo2a*w2*sin(j1-j2); /*滑块A的法向速度*/aj=-(2*Va*w3+Lo2a*w2*w2*sin(j1-j2))/Lo3a; /*滑块A的法向加速度*/at=Lo3b*aj*cos(j2); /*滑块B的切向加速度*/an=Lo3b*w3*w3*sin(j2); /*滑块B的法向加速度*/a=an-at; /*刨刀的加速度*/printf("%2d%12.3f%16.3f%16.3f%16.3f\n",i,j1/PI*180,S,V,a);fprintf(fp,"%2d%12.3f%18.3f%18.3f%18.3f\n",i,j1/PI*180,S,V,a);fclose(fp);}main(){ FILE *fp;if((fp=fopen("d:\\NTB5.txt","w+"))==NULL)exit(0);printf(" NO:\t j1\t\t S\t\t V\t\t a\n\n");for(j1=0,i=1;j1<=2*PI;j1=j1+(10*PI/180),i++) /*随角1变化定义循环*/{ PRINT(j1);if(i%20==0)system("pause");}fclose(fp);system("pause");}(4)程序运行结果及图表分析:系列角度位移 (mm) 速度(mm/s) 加速度(mm/s2)1 0.000 -0.000 -1193.611 0.0002 10.00 -31.649 -1186.250 554.7743 20.000 -62.906 -1164.052 1118.3854 30.000 -93.372 -1126.651 1700.9965 40.000 -122.636 -1073.379 2315.6086 50.000 -150.262 -1003.161 2979.9417 60.000 -175.780 -914.367 3718.9078 70.000 -198.666 -804.569 4567.8339 80.000 -218.318 -670.223 5576.40110 90.000 -234.020 -506.229 6812.47911 100.00 -244.894 -305.427 8362.83612 110.000 -249.840 -58.197 10322.22013 120.000 -247.470 247.287 12750.26814 130.000 -236.077 622.807 15555.74415 140.000 -213.705 1073.216 18256.81816 150.000 -178.519 1581.651 19648.85917 160.000 -129.655 2088.243 17756.87318 170.000 -68.554 2480.597 10913.57619 180.000 -0.000 2631.014 0.02620 190.000 68.554 2480.598 -10913.53421 200.000 129.655 2088.246 -17756.85522 210.000 178.519 1581.653 -19648.86323 220.000 213.705 1073.218 -18256.82824 230.000 236.077 622.808 -15555.75325 240.000 247.470 247.288 -12750.27626 250.000 249.840 -58.196 -10322.22627 260.000 244.894 -305.427 -8362.84128 270.000 234.020 -506.229 -6812.48329 280.000 218.318 -670.223 -5576.40430 290.000 198.666 -804.568 -4567.83631 300.000 175.780 -914.366 -3718.91032 310.000 150.262 -1003.161 -2979.94433 320.000 122.636 -1073.379 -2315.61034 330.000 93.373 -1126.651 -1700.99835 340.000 62.906 -1164.052 -1118.38736 350.000 31.649 -1186.250 -554.77637 360.000 0.000 -1193.611 -0.002 (5)运行结果的图表分析:(6)图解法检验:取3个位置分别为α1=0°,90°, 40°,分别用图解法求位移,速度,加速度,如图,经检验,所得结果与上述结果在允许误差范围内一致,故结果正确。
任务1-1 牛头刨床传动机构运动简图测绘ppt课件
拓展学习 【小组活动】
讨论:机构具有确定的相对运动的条件
【教师指导】
由前述可知,只有主动件才能独立运动,从动件是不能独立运动 的。通常每个主动件只有一个独立运动,因此机构具有确定的相 对运动的条件是:机构自由度F>0,且F等于主动件的数目。
主动件的数目不等于机构自由度数,会产生什么结果呢? (参见右图。)
图a)为主动件数小于机构自由度的例子。由于主动件只有一 个,而机构自由度F=3×4-2×5=2,所以,当只给定主动件的位 置角时,从动件2、3、4的位置不能确定(有多解)。因此,当主动 件匀速转动时,从动件2、3、4将随机乱动。
图b)为主动件数大于机构自由度的情形。显然,除非将构件 2拉断,否则不可能同时满足主动件1、3的给定运动。
4、原动件与输出构件之间采用多组完全相同的运动链。
项目一 牛头刨床机械传动系统分析 任务1-1 牛头刨床传动机构运动简图测绘
例
复
2
5
3局
1
4
7
8
虚
6
8
F=3n-2PL-PH =3 7-2 9 -1 =2
项目一 牛头刨床机械传动系统分析 任务1-1 牛头刨床传动机构运动简图测绘
【小组讨论】 1、计算牛头刨床带传动机构的自由度
项目一 牛头刨床机械传动系统分析 任务1-1 牛头刨床传动机构运动简图测绘
三、平面机构的自由度
自由度构件所具独立运动的个数(确定构件位置所需 独立坐标数)。
一个完全自由的平面运动构件具有三个自由度。
y
y
x
x
项目一 牛头刨床机械传动系统分析 任务1-1 牛头刨床传动机构运动简图测绘
机械设计第10章机械传动系统及其传动比
机械设计第10章机械传动系统及其传动比机械传动系统及其传动比案例导入:在实际的机械工程中,为了满足各种不同的工作需要,仅仅使用一对齿轮是不够的。
本章通过带式输送机、牛头刨床、汽车变速箱和差速器、自动进刀读数装置、滚齿机行星轮系等例子,介绍轮系的概念、分类、传动比的分析计算方法。
第一节定轴轮系的传动比计算在实际应用的机械中,为了满足各种需要,例如需要较大的传动比或作远距离传动等,常采用一系列互相啮合的齿轮来组成传动装置。
这种由一系列齿轮组成的传动装置称为齿轮系统,简称轮系。
一、轮系的分类轮系有两种基本类型:(1)定轴轮系。
如图10-1所示,在轮系运转时各齿轮几何轴线都是固定不变的,这种轮系称为定轴轮系。
(2)行星轮系。
如图10-2所示,在轮系运转时至少有一个齿轮的几何轴线绕另一几何轴线转动,这种轮系称为行星轮系。
图10-1 定轴轮系二、轮系的传动比1.轮系的传动比轮系中,输入轴(轮)与输出轴(轮)的转速或角速度之比,称为轮系的传动比,通常用i表示。
因为角速度或转速是矢量,所以,计算轮系传动比时,不仅要计算它的大小,而且还要确定输出轴(轮)的转动方向。
2.定轴轮系传动比的计算根据轮系传动比的定义,一对圆柱齿轮的传动比为nzi12 1 2 n2z1式中:“±”为输出轮的转动方向符号,图10-2行星轮系第十章机械传动系统及其传动比当输入轮和输出轮的转动方向相同时取“+”号、相反时取“-”号。
如图10-1a) 所示的一对外啮合直齿圆柱齿轮传动,两齿轮旋转方向相反,其传动比规定为负值,表示为:i=n1=n2z2 z1如图10-1b)所示为一对内啮合直齿圆柱齿轮传动,两齿轮的旋转方向相同,其传动比规定为正值,表示为:n1z2 i= =n2z1如图10-3所示的定轴轮系,齿轮1为输入轮,齿轮4为输出轮。
应该注意到齿轮2和2'是固定在同一根轴上的,即有n2=n2′。
此轮系的传图10-3定轴轮系传动比的计算动比i14可写为:nnn ni14 1 123 i12i2 3i***** z2z3z4 312上式表明,定轴轮系的总传动比等于各对啮合齿轮传动比的连乘积,其大小等于各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比,即m从1轮到k轮之间所有从动轮齿数n的连乘积i1k 1 1 (10-1) nk从1轮到k轮之间所有从主轮齿数的连乘积式中:m为平行轴外啮合圆柱齿轮的对数,用于确定全部由圆柱齿轮组成的定轴轮系中输出轮的转向。
机械原理-课程设计.插床机构设计
设计任务书1.1设计题目插床机构设计1.2 插床简介定义:金属切削机床,用来加工键槽。
加工时工作台上的工件做纵向、横向或旋转运动,插刀做上下往复运动,切削工件。
介绍:利用插刀的竖直往复运动插削键槽和型孔的直线运动机床。
插床与刨床一样,也是使用单刃刀具(插刀)来切削工件,但刨床是卧式布局,插床是立式布局。
插床的生产率和精度都较低,多用于单件或小批量生产中加工内孔键槽或花键孔,也可以加工平面、方孔或多边形孔等,在批量生产中常被铣床或拉床代替。
普通插床的滑枕带着刀架沿立柱的导轨作上下往复运动,装有工件的工作台可利用上下滑座作纵向、横向和回转进给运动。
键槽插床的工作台与床身联成一体,从床身穿过工件孔向上伸出的刀杆带着插刀边做上下往复运动,边做断续的进给运动,工件安装不像普通插床那样受到立柱的限制,故多用于加工大型零件(如螺旋桨等)孔中的键槽。
工作原理:插床实际是一种立式刨床,在结构原理上与牛头刨床同属一类。
插刀随滑枕在垂直方向上的直线往复运动是主运动,工件沿纵向横向及圆周三个方向分别所作的间歇运动是进给运动。
插床的主参数是最大插削长度。
插床是用于加工中小尺寸垂直方向的平面或直槽的金属切削机床,多用于单件或小批量生产。
图1 插床示意图图5 从动件运动规律线图图6 凸轮轮廓曲线与刀具中心轨迹图7 凸轮理论廓线与滚子包络线设 计 计 算 与 说 明主 要 结 果8.插床导杆机构的综合及运动分析 曲柄转速147/n rad s = 曲柄长度72AB L mm = 插刀行程140H mm = 行程速度比系数 1.7K =连杆与导杆之比/0.60DE CD L L = 力臂120d mm = 工作阻力7500F N = 导杆3的质量326m kg =导杆3的转动惯量23 1.3S J kgm = 滑块5的质量545m kg =147/n rad s =72AB L mm =140H mm =1.7K =/0.60DE CD L L =120d mm =7500F N =326m kg =23 1.3S J kgm =545m kg =8.1 插床导杆机构的综合1、计算极位夹角 ,曲柄角速度1ω,曲柄角加速度1ε118046.6671K K θ-=︒=+112 4.922/60n rad s πω==210.00/rad s ε=2、求导杆长度CD L ,连杆长度DE L ,中心距AC L 根据插床机构结构示意图,由几何条件可得176.7322sin2CD H L mm θ==因为/0.60DE CD L L =,0.6106.039DE CD L L mm =⨯=181.782sin2AB AC L L mm θ==3、求弓形高b ,导路距离e L14.4542tan2CD H b L mm θ=-=351.2872e AC CD bL L L mm =+-=46.667θ= 1 4.922/rad s ω= 210.00/rad s ε=176.732CD L mm =106.039DE L mm = 181.782AC L mm =14.454b mm =351.287e L mm =3.9083.908。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
牛头刨床执行机构及部件设计本文先介绍了牛头刨床的工作原理,在满足运动协调的条件下,设计了刨床机构系统的运动尺寸,然后运用PRO/E软件对牛头刨床主要结构进行三维实体建模并装配,并通过该软件对牛头刨床机构的运动协调性进行仿真,进一步得出滑枕的位移、速度、和加速度随时间的变化曲线,从而验证牛头刨床机构系统运动尺寸的合理性。
其次,根据MATLAB软件对刨床主运动仿真得出的受力分析结果,对部分杆件进行强度计算校核。
牛头刨床是最早应用在生产实际中的金属切削机床之一。
机床的技术水平直接影响到它所加工零件的产品质量。
制造业是一个国家的现代化的源动力,是一个国家经济的支柱,是一个国家实现工业化之本,而评价一个国家制造业的高低,首先取决于工作母机的加工质量,也就是说机床的技术水平直接影响到制造业。
刨床因其结构简单,造价低廉,相对其他机床来说,其加工平面的效率很高,所以一直到现在其在工厂的加工应用很广泛。
近年来随着电子技术的发展,牛头刨床迎来了新时代,各种类型的刨床相继研发出来,其类型主要由机械牛头刨床,液压牛头刨床,数控牛头刨床,等。
每种类型的牛头刨床都有其自身的特点和加工优势,但与国外同种类型的的牛头刨床相比,我国的牛头刨床的技术水平在某些方面仍然很有限,其加工精度与和效率与国外的机床相比还有一定的差距,很多核心技术还没有完全国产化。
在提高技术方面,我国的科研人员还需奋起直追,要走很长的路。
通过对传统牛头刨床基础机构的研究,加深了对刨床运动机构的运动特性和力学特性的理解,从而为研究高精度的牛头刨床打下基础。
1.国外的研究状况牛头刨床在国外应用比较早,所以研究也更深入。
随着计算机技术的发展使得数控技术蓬勃发展,数控刨床完全靠程序控制,调整时只需改变程序即可,无需人的参与,因此适应性更强,加工范围更广,生产效率更高。
国外各种数控刨床的类型非常齐全,加工精度高,因此广泛应用于各种柔性自动化生产线中。
2.我国的研究状况我国最早的牛头刨床是60年代从苏联引进的,随着工业加工技术的发展,传统机械牛头刨床加工出零件的精度,已远远不能满足产品在装配精度和产量上的要求,近年来我国牛头刨床的研究形势喜人,硕果累累,不同类型的刨床相继研发出来,数控伺服系统也应用其中。
例如双向数控曲面刨床,它既不像牛头刨床,由不像传统的龙门刨床,工作时刀具在双向往复的切削曲面零件,这种刨床彻底颠覆了我们对传统刨床的认识,开创了刨床的新时代。
但是和国外同种类型的刨床相比,我国的刨床在稳定性、效率和加工精度方面还有欠缺。
因此,应用新兴的先进技术改造在线设备,优化结构设计势在必行。
通过查阅资料及在实训中心参观现有的刨床,确定了牛头刨床的工作原理为:滑枕带动刨头作往复直线切削运动,和工作台做间歇直线进给运动来实现平面的切削加工。
工作台的间歇送进运动与刨头的往复切削运动必须协调配合,工作台的送进应在刀具非切削时间内进行,其余时间保持不动。
牛头刨床主要由床身、滑枕、刀架、工作台、和横梁等部分组成。
其中床身用来支撑和连接刨床的各个部件,滑枕在其顶面的导轨上作往复直线运动,横梁在其侧面的竖直导轨上作升降运动。
床身内部装的变速机构用来改变滑枕的往复运动的速度,摆杆机构则是通过改变曲柄的长短来改变滑枕的行程长度。
滑枕主要的作用是用来带动刨刀作直线往复运动(即主运动)。
滑枕前端装有刀架,内部装有丝杠螺母传动装置,可用来改变刨刀相对工件的往复行程位置。
刀架的作用是夹持刀具,,同时带动刨刀作进给运动。
刨刀安装在刀架上,在回程时,刨刀可绕A轴自由上抬,减少了刀具和工件的摩擦。
工作台用来安装工件,其台面上的T型槽可穿入螺栓来装夹工件或夹具,工作台可随横梁在床身的垂直导轨上作上下调整,同时也可在横梁的水平导轨上作水平方向移动和间歇的进给运动。
根据要求及给出的数据参数确定牛头刨床六连杆机构的基本尺寸数据,由于执行机构有协调性运动关系,设计出从运动四连杆的尺寸及形状,且要满足其强度要求,应用Pro/E软件中的仿真模块对其进行三维建模和仿真,根据仿真结果修改相应的尺寸,优化结构设计,直至满足要求。
第1章确定执行机构主从运动尺寸1.1 确定六连杆机构的尺寸牛头刨床六杆机构的运动数学模型如下图1。
1所示,其中曲柄1位原动件,动力提供经由齿轮减速机构传递过来,各连杆的结构尺寸的确定如下:图1.1六杆机构简图由已知条件 n1=60 str/min H=650 K=1.7 Fr=9000N 得:极为夹角θ=180(k-1/(k+1)=46.7°sin(θ=820㎜由公式知导杆长度CDL=H/2)2/取 AC L /CD L =0.6则 AC L =492㎜曲柄L AB L 在极限位置时 AB L /AC L =)2/(θSIN则 AB L =195㎜连杆DE L 与滑枕夹角去25° 得DE L =H/2)25(︒COS =360㎜又由三角函数知CE L =890㎜1.2 确定执行机构运动循环图设摆杆L CD 在右极限位置时,曲柄AB L 开始转动,其转角为0°,且逆时针位正。
由运动协调关系知:滑枕在工作行程时即曲柄AB L 在(0°-226.7°)内转动时,工作台静止,当滑枕回程时,工作台必须在曲柄AB L 在(226.7°-360°)内转动时完成进给,设工作台在240°时开始进给,刀具在切削前后各有一段约0.05H 的空刀距离,其运动循环图如图1.2。
图1.2 机构运动循环图1.3棘轮机构的设计进给棘轮的齿数Z 可根据工作台的最小进给量min 2f 和所选择的丝杠导程予以确定,取丝杠导程P=6㎜ 又min 2f =0.3㎜ max 2f =1.8㎜则棘轮齿数 Z=P/min 2f =20进给机构中曲柄摇杆机构的摆角ϕ可以根据工作台的最大进给量确定,棘轮所拨过的最多齿数 Z'=max 2f /min 2f =6则摆杆摆角 ϕ=360°/20*z'=108°选取棘轮的模数 m =2则棘轮外径 D 棘=m*z=801.4 确定曲柄摇杆机构的尺寸由运动循环图1.2可知,主轴曲柄在(0º~240º)转动时工作台不动,主轴曲柄在(240º~360º)转动时,工作台移动,即曲柄摇杆机构在(240º~360º)时急回,则其极位夹角θ'=240º-180º=60º,行程速比系数 K'='180'180θθ-︒+︒=2。
显然摇杆长度应大于棘轮半径,即L C 'D '>D 棘/2取摇杆 L C 'D '=250㎜又因摆杆L CD 在左极限位置时2/H =325㎜,所以主从机构的两主轴不应距离太近,取L =470㎜。
根据急回运动的要求设计从运动四杆机构,利用机构在极限位置时的几何关系作图1.3,其中图中A 、C 是图1.1六杆机构中的一部分。
根据摇杆长度LC 'D'及摆角ϕ作出摇杆的两极位1C 'D '及 2C 'D ',分别作C 'M ⊥1C '2C '和∠1C '2C 'P=90º-θ'=30°,1C 'M 与2C 'N 交于点P ;作△P 1C '2C '的外接圆,在圆上任意一点A '都满足 ∠1C 'A '2C '=60°,连接A A ',取L A A '=280㎜,再连接直线2C 'A '与1C 'A ',故铰链A '的位置已确定。
由几何关系知:L A'2C'=L B'C'+L A'B'=471.91㎜L A'1C'=L B'C'-L A'B'=220.54㎜求得四连杆的结构尺寸为:L A'D'=228㎜L C'D'=250㎜L B'C'=343㎜L A'B'' =125㎜且 L A'B'+L B'C'<L C'D'+L B'C'满足杆长条件。
图1.3曲柄摇杆的极限位置图第2章 执行部分主传动轴的设计及校核2.1 轴设计的简介轴的设计主要包括结构设计和工作能力校核两方面的内容。
轴的结构设计首先要考虑到轴上零件的安装、定位,还需考虑轴的材料和制造工艺,合理地确定轴的结构形式和尺寸。
如果轴的结构设计不合理,不仅会增加轴上零件安装定位的难度,还会对整个组件的工作能力造成影响,从而会降低轴和轴上安装定位零件的寿命,增加成本,使机床的整体性价比降低。
轴的工作能力的校核,是指对轴进行强度、刚度和震动稳定性等方面的计算。
大多数情况下轴的工作能力取决于轴的强度,这时只需进行轴的强度计算,以防断裂和塑性变形,对于高速旋转的轴,不仅需要进行强度校核,还需考虑其工作时震动的稳定性,进行震动稳定性校核,以防发生共振。
2.2 设计前的数据准备2.2.1 计算传动主轴的功率P 、转速n 和转矩T根据牛头刨床刨头每分钟的往复次数为n 1=60str/min 可知,n=n 1=60r/min又根据前面减速机构的传动方案设计、电动机的选择得出传到执行主轴的功率为P=2.323kW 于是 T=9550000n P =9550000*60323.2N .㎜≈369744N .㎜2.2.2 求作用在齿轮上的力已知低速级圆柱斜齿轮的分度圆直径为d 2=mZ 2=4*131=524mm 则F t =22d T =1411 N Fr=F tβαcos tan n =1411*︒︒686.13cos 20tan =529 N Fa=F t tan β=1411*tan13.686°=345 N2.2.3 初步确定轴的最小直径及长度选取轴的材料为45钢,调质处理。
由查手册取A 0=112,于是得d min =A 03np =112*360323.2=37.9㎜ 当轴截面上开有键槽时,为了抵消键槽对轴的强度的削弱,应根据键槽的个数适当增加轴径。
查得相关规定得知:有两个键槽时,应增大10%~15%。
此轴有两个键槽,取 d Ⅰ-Ⅱ=44㎜应为此处安装斜大圆柱齿轮,取该段长度L Ⅰ-Ⅱ=56㎜2.3 轴的结构设计2.3.1 拟定轴上零件的装配方案根据轴上零件装配定位的要求作出走的装配图如下:。