一种七自由度机械臂的研制
基于BP神经网络的冗余机械臂逆运动学分析

i
c
a
lSc
i
enc
eandEng
i
ne
e
r
i
ng Hua
zhong Un
i
ve
r
s
i
t
f
yo
o.
Sc
i
enc
eandTe
chno
l
ogy,Wuhan,430074
me
s
Ab
s
t
r
a
c
t:
Gene
r
a
l7 DOFr
edundan
t man
i
l
a
t
o
r
si
nve
r
s
ek
i
nema
t
i
c
ss
o
l
余机械臂能实 现 避 障 [1],具 有 容 错 [2]和 关 节 力 矩
[
3]
形角的概念,将冗余机械臂的前三个关节、第四个
等功能,但 冗 余 特 性 使 其 逆 运 动 学 解 法 过
关节、后三个关节分别类比于人体的肩关节、肘关
于繁杂,限制 了 冗 余 机 械 臂 的 应 用.机 械 臂 运 动
节和腕关节,通过 建 立 臂 形 角 的 约 束 来 参 数 化 求
t
hodha
se
f
f
i
c
i
enc
i
r
e
c
i
s
i
on,
yandh
ghp
七自由度冗余机械臂逆运动学求解方法主要
:
0 引言
:/
/
k
机械臂力位置混合控制方法研究

机械臂力位置混合控制方法研究本文主要研究了机械臂力位置混合控制方法,通过结合力和位置两种控制方式,实现了机械臂的高精度和稳定性控制。
本文首先介绍了混合控制方法的基本原理和优点,然后详细阐述了实验过程和结果。
总结了研究成果和不足之处,并提出了未来的研究方向。
随着机器人技术的不断发展,机械臂在工业和医疗等领域的应用越来越广泛。
为了实现机械臂的高精度和稳定性控制,研究者们不断探索新的控制方法。
混合控制方法是一种将力和位置两种控制方式相结合的控制方法,具有提高控制精度、减小振动和降低能耗等优点。
本文主要研究了机械臂力位置混合控制方法,并对其进行了实验验证。
混合控制方法是一种将力和位置两种控制方式相结合的控制方法。
该方法通过同时控制机械臂的位置和力度,实现了机械臂的高精度和稳定性控制。
混合控制方法的原理是,通过传感器实时检测机械臂的位置和力度,将实际值与目标值进行比较,根据误差信号控制机械臂的位置和力度。
为了验证混合控制方法的有效性,本文设计了一系列实验。
实验材料包括一台六自由度机械臂、一个力传感器和一个位置传感器。
实验过程中,首先通过位置传感器实时检测机械臂的位置,然后通过力传感器检测机械臂的力度,将实际值与目标值进行比较,根据误差信号控制机械臂的位置和力度。
通过实验验证,本文发现混合控制方法具有以下优点:提高控制精度:由于同时控制机械臂的位置和力度,可以减小位置和力度之间的误差,提高控制精度。
减小振动:通过实时调整机械臂的位置和力度,可以减小机械臂受到的冲击,从而减小振动。
降低能耗:通过优化机械臂的位置和力度,可以减小机械臂的功耗,从而降低能耗。
本文研究了机械臂力位置混合控制方法,通过结合力和位置两种控制方式,实现了机械臂的高精度和稳定性控制。
实验结果表明,混合控制方法具有提高控制精度、减小振动和降低能耗等优点。
但是,该方法仍然存在一些不足之处,例如对硬件设备和算法的要求较高,需要进一步研究和改进。
本文的研究成果为机械臂力位置混合控制方法的应用提供了有益的参考。
苹果采摘机械设计 (1)

毕业设计(论文)苹果采摘机械设计Design of apple picking machine学生姓名彭靖文学生专业机械电子工程3班学生年级14级指导教师李永阳广东科技学院教务处制目录摘要 (2)Abstract (3)1绪论 (5)1.1课题研究背景及来源 (5)1.2 国内外研究进展 (6)1.2.1 国外研究进展 (7)1.2.2 国内研究进展 (11)1.3 研究内容及意义 (13)2机构的总体方案设计 (15)2.1 机构工作的基本原理 (15)3机构的机械结构设计 (18)3.1 机构的剪夹器传动类型选择 (18)3.2 机构的剪夹器设计 (18)3.2.1剪夹器工作过程分析 (18)3.2.2剪夹器原理设计 (19)3.2.3曲柄摇杆的设计 (20)3.2,4原位置返回设计 (21)3.3 机构的手机连接无线摄像头 (23)3.4机构的电机选择 (25)3.4.1负载电机选型 (25)3.5 机构的开关设计 (26)4结论和展望 (28)4.1结论 (28)4.2主要创新点 (28)参考文献 (29)致谢 (30)摘要鲜果和加工制品是苹果消费市场的主要产品,鲜果的比例目前高达百分之九十,而加工制品仅仅占百分之十左右,为了保证苹果的品质,我国就苹果产业来说目前的重中之重是适时采摘。
采摘工作的日益繁重与劳动力的极度缺乏使得适时采摘现在变得越来越难,而现在苹果采摘是苹果生产中耗时费力的环节之一,需投入非常多的劳动力,我国农业目前无论是机械化还是智能化水平都较低,所以就目前而言,研制一款简单经济的、可以提高采摘效率的机构就显得尤为重要,是具有很重要的战略意义的。
本课题旨在设计一款简单、方便、经济的苹果采摘机构,主要研究的内容包括以下几个方面:(1)首先运用人机工程学的所学内容来设计适合成年人使用机构的尺寸以及机构零部件的选型。
(2)本设计运用了步进电机实现半自动化的控制升降以及控制采摘的工作,涉及材料力学以及机械原理的所学内容,后续会有验证。
7自由度机械臂底座计算
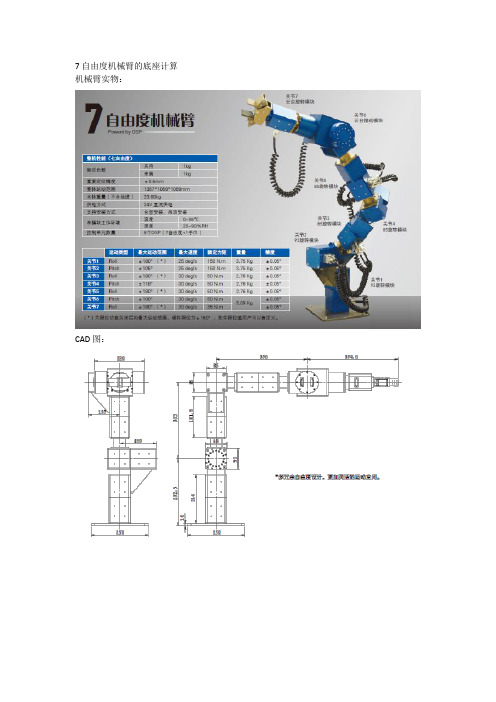
7自由度机械臂的底座计算机械臂实物:CAD图:重心简化模型:最大伸展状态下最大扭矩时负重{关节2作为输出力矩最大的旋转关节,额定力矩150N*M,力矩tol和负载m函数:G=mg=1KG*10N/kg(9.8N/kg)=10N(9.8N)Tol= 65mm*3.5kg*10N/kg*0.001m/mm+311*2.7/100+675*10/100+m*858/100= 78.1720+m*8.58<150 :仅考虑关节2不全面m<8.3716 (最大扭矩安全系数一般安全系数可取1.05)但是关节1会受到同等大小的力矩,产生的对应剪切力矩,轴向上剪切力的估计值3500N+} 当额定载荷1kg时,同样算法的估计值78.1720+1*8.58)*1000/42.5约2000N(3关节末端10kg,6关节末端2kg,随着的末端力臂的增长,负载减少)最大伸展半径为857.6,额定载荷1kg,得到此临界条件下,底座半径x与底座质量M的关系:质量M=-((x-65)*3.5+(x-311)*2.7+(x-675)*10+7.5*x+(x-858)*1)/x底座半径在100至200间时:工作空间所需高度与人机工程学共同决定底座高度参考402机械臂参数:末端伸展长度70cm~80cm,底座尺寸,与机械臂相连处45*40,与地面通过螺栓连接,尺寸(45+9*2)*(40+9*2),底座半径最小处29.机械臂高度:1.2m~1.3m,底座高度22+,但是有木地板,提升了水平地面的高度。
情况1:最低(掉电?直流供电?有断电保护功能,有软硬件限位功能):293-395-396=-498;减少地面干涉对工作空间干涉,同时也是地面夹取最大高度最高:333+293+396+395=1417情况2:333+293=626,关节4最大高度333+293+396= 1022,关节4最大高度满足需求:能从地面拿物件,常用工作空间在合适的位置上(站着使用的工作表面的最舒适高度是低于人的肘部高度7.6cm,约1m)。
多自由度机械臂的脑电、眼电脑机控制系统的制作方法

本技术提供了多自由度机械臂的脑电、眼电脑机控制系统,涉及脑机接口的技术领域。
包括:启闭指令采集模块,采集非脑信号并输出启闭指令;分类信号采集模块,采集脑信号后输出分类信号;取消指令采集模块,采集非脑信号并输出取消指令;刺激模块,输出刺激信号;启闭指令接收模块,接收启闭指令并控制刺激模块的启闭;分类信号接收模块,接收分类信号并输出动作信号,同时刺激模块对分类信号包含的信息进行显示;取消指令接收模块,接收取消指令以拦截动作信号;还包括接收动作信号的动作信号接收模块和用于完成相应动作的机械臂。
本技术通过特征明显的眨眼动作来控制刺激信号的输出启闭以及动作信号的拦截取消,提高了脑机交流的准确率。
技术要求1.多自由度机械臂的脑电、眼电脑机控制系统,其特征在于,包括:主机单元(1),包括启闭指令采集模块(11),用于采集非脑信号并输出启闭指令;分类信号采集模块(12),用于采集脑信号后对其进行分类并输出分类信号;取消指令采集模块(13),用于采集非脑信号并输出取消指令;刺激单元(2),包括刺激模块(24),用于对外输出刺激信号;启闭指令接收模块(21),用于接收所述启闭指令并控制所述刺激模块(24)的输出启闭;分类信号接收模块(22),用于接收所述分类信号并输出动作信号,同时由所述刺激模块(24)对所述分类信号包含的信息进行显示;取消指令接收模块(23),用于接收所述取消指令以拦截动作信号,当未采集到非脑信号时不拦截动作信号,当采集到非脑信号时拦截动作信号;外部设备(3),包括动作信号接收模块(31)和机械臂(32),所述动作信号接收模块(31)用于接收所述动作信号并控制所述机械臂(32)完成相应动作。
2.根据权利要求1所述的多自由度机械臂的脑电、眼电脑机控制系统,其特征在于,所述非脑信号为眼电信号,所述启闭指令和所述取消指令分别对应不同的眼电信号,其中,所述启闭指令对应多次连续眨眼的动作,所述取消指令对应单次单眼眨眼的动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ofed m T e ecietes u tr ei ad rs a do i b i t b i nt ik aa ees f re o .h nd sr t cua d s s n ad, nt s a s o ul o el r m t . b h r l n g t n h s d h np r
【 摘
要】 冗余度机器人相比较非冗余度机 器人具有消除不可避免的奇异位形、躲避任务空间障
碍、 克服关节运动极限等优点。介绍设计 了一种新型的七 自由度机械臂 , 其结构设计是在 6 R机械臂的 基础上增加一个 自由度 , 是一种典型的冗余度机械臂。阐述了该机械臂的结构设计标准, 并在此基础上 构建各连杆坐标 系, 计算 了主要部件 的转动惯量并据此选择 了电机和谐波减速器, 最后在有限元分析 软件 A S S中对关键部件进行 了有限元分析。仿真结果表明, NY 所设计的部件性能达到设计要求。
( c ol f c a i l n ie r ga dA tm t n S a g a U i r t,h n h i 0 0 2 C i ) h o o h nc g ei n uo ai ,h n h i nv sy S a g a 2 0 7 , hn S Me aE n n o ei a
Th e in o e e — e r e r d n a tma i ua o e d sg fa s v n — g e e u d n n p lt r d
S A a — n C I e,H N Z n  ̄u 1 I o g H O Y n mig, U 1 A e g n, n Z 2 LR
w rsaetnrd cs okp . t ue c Ii o a聊 t eo ee- e e rd natoo niua rw i ido t i y vn dg eo eu d bt p fs r f n r ma p lo.hc iakn y — t hs f p
c lr du d n npul o ;t tu t r ld sg s b s d o he 6R n i l o n wh c d e e a e n a tma i a r issr c u a e in i a e n t t ma pu a ro i h we a d a d g e t r
t tert i a iet. ia ytekyc m o e t aeaaye yte o w eA S ST es uai — o h o o l n ra Fn l h e o p n ns l zdb h f a N Y . i l o r t a n i l n r s tr h m t ne sh h w ta te t n s o eds n dc m o e t m e teds q i m ns u s o t h i es t ei e o p n ns e th ei r ur e t s h sf f h f g n g e e .
第 1 0期 21 年 l 01 0月
文 章 编 号 :0 13 9 (0 1 1— 15 0 10 — 9 7 2 1 )0 0 1- 3
机 械 设 计 与 制 造
Ma h ne y De i n c i r sg & Ma fc u e nu a t r 15 1
一
种七 自由度机械臂 的研制
关键词 : 自由度 机械臂 ; 七 冗余度 ; 限元分析 有
【 bt c】 otn gm r dg e of eo a e a ae edd iie y o t d n A s at C n i n o er s f r dmt nt s s c nee,ts a frh r u- r ai e e e h h tk p s ee
Tertin et ema o p nnsaec cle , em t n eue eslc dacrig h oaoa i rao t i cm oet r a ua dt o r drd cr e t codn t l n if h n l t h oa r a ee
d t n iua rt a o bt lsa doec m i uai dh sm r f xbem v m n dbge n ma p it vi o s ce v ro es g l t a a oel il oe e t i r a !o o d a n n ryn e n a g
邵艳呜 - 崔 泽 1 韩增军 李 戎 。 , 2 ( 上海大学 机 电工 程与 自动化 学院 , 海 2 0 7 ) , 上 0 0 2 (哈尔滨工 业大学 机 器人技术 与 系统 国家重点 实验室 , z 哈尔滨 10 0 ) 5 0 1
(上海大 众汽车有 限公司 规划部 , 3 上海 2 10 ) 0 80
( t eK yL b rt yo o oi n ytm, ri s tt o eh o g , ri 5 0 1 C ia 2 a e a oao f b t sadSs St r R c e HabnI tue f cn l yHabn10 0 , hn ) ni T o
( h n h i okw g nA tm t eC . t ,l nn e at e tS a g a 2 1 0 , hn ) a g a V ls ae uo oi o, d Pa igD p r n,h n h i 0 8 0 C ia S v L n m