机械臂轨迹规划
机械臂运动轨迹自动生成原理

机械臂运动轨迹自动生成原理机械臂是一种高精度、高效率的工业自动化设备,广泛应用于制造业、物流仓储、医疗等领域。
随着人工智能和自动化技术的不断发展,机械臂的应用范围和功能也在不断扩大。
机械臂的核心功能之一是实现各种复杂运动轨迹的自动生成,这对于提高生产效率和精度具有重要意义。
在传统的机械臂系统中,通常需要通过编程或者手动控制来实现机械臂的运动控制。
这种方式存在着繁琐、低效的缺点,尤其是对于复杂的多轴运动控制更加困难。
因此,研究如何实现机械臂运动轨迹的自动生成成为了当前的热点问题之一。
机械臂运动轨迹的自动生成原理主要包括路径规划、轨迹规划和运动控制三个方面。
路径规划是指根据机械臂的起始姿态、目标姿态以及工作环境等因素,确定机械臂的运动路径,以保证机械臂在运动过程中不会与障碍物发生碰撞。
路径规划的关键技术包括碰撞检测、路径优化和运动规划等。
轨迹规划是指在确定了机械臂的运动路径之后,将路径离散化为一系列连续的运动轨迹点,以实现机械臂的平滑运动。
轨迹规划的关键技术包括速度规划、加速度规划和轨迹优化等。
通过合理的轨迹规划,可以使机械臂在运动过程中达到更高的运动精度和稳定性。
运动控制是指根据机械臂的轨迹规划信息,通过控制机械臂各个关节的运动,实现机械臂的精确控制。
运动控制的关键技术包括运动学建模、动力学建模和控制算法设计等。
通过运动控制,可以实现机械臂在运动过程中的快速响应和高精度控制。
为了实现机械臂运动轨迹的自动生成,需要综合考虑路径规划、轨迹规划和运动控制三个方面的技术,构建一个完整的系统。
首先,需要对机械臂系统进行建模和参数化,包括机械结构、关节运动范围和动力学性能等。
然后,根据实际应用需求确定机械臂的起始姿态和目标姿态,以及工作环境的信息。
接着,利用路径规划算法对机械臂的运动路径进行规划,并进行碰撞检测和路径优化,确保机械臂在运动过程中不会发生碰撞。
然后,通过轨迹规划算法将机械臂的运动路径离散化为一系列连续的轨迹点,实现机械臂的平滑运动。
探究双臂协作机器人的轨迹规划算法

探究双臂协作机器人的轨迹规划算法双臂协作机器人的轨迹规划算法随着人类社会的不断发展,机器人的应用范围也越来越广泛。
双臂协作机器人是机器人技术中的一个重要分支,它可以模拟人类双臂协作,实现更高效的生产和制造,帮助人类减轻繁重的体力劳动和危险操作。
而在双臂协作机器人中,轨迹规划算法是至关重要的一环,下面我们将探究双臂协作机器人的轨迹规划算法。
1. 双臂协作机器人的基本原理双臂协作机器人主要依靠两只机械臂协同工作来完成任务。
每只机械臂由多个关节和执行器组成,可以实现各种灵活的运动。
同时,双臂协作机器人通常还配备了视觉、力觉等多种传感器,用于感知周围环境和获取任务信息。
在实际应用中,双臂协作机器人可以完成诸如物料搬运、装配、焊接等多种任务,具有广泛的应用前景。
2. 双臂协作机器人轨迹规划的难点双臂协作机器人的轨迹规划算法需要解决的主要问题是如何确定两只机械臂的轨迹,使得它们能够协同完成任务且不会相互干扰。
这是一个非常复杂的问题,需要考虑到大量的因素,如机械臂的动力学和运动学特性、运动过程中碰撞检测和避免、任务的优化等等。
因此,双臂协作机器人轨迹规划算法的设计需要充分考虑这些因素,并综合运用数学、物理、计算机科学等多学科知识。
3. 双臂协作机器人轨迹规划算法的分类根据不同的实际应用需求,双臂协作机器人轨迹规划算法可以分为以下几类:(1)同步运动同步运动是指两只机械臂同时执行相同的轨迹,以完成任务。
这种方法比较简单,但运动效率较低,不适合一些复杂的任务。
(2)轮换运动轮换运动是指两只机械臂交替执行不同的任务,通过互相配合来完成整个任务。
这种方法的优点是可以提高机器人的工作效率,但需要严格的协调和调度,否则容易出现运动冲突或者时间浪费等问题。
(3)互补运动互补运动是指两只机械臂分别执行不同的任务,但互相协作,以完成整个任务。
这种方法的优点是可以灵活地适应各种任务需求,但需要更加复杂的轨迹规划算法和协作策略。
4. 双臂协作机器人轨迹规划算法的优化为提高双臂协作机器人的效率,还可以采用一些优化方法来改进轨迹规划算法,例如:(1)机器学习采用机器学习方法,可以通过训练机器人的神经网络,使其具有更好的学习和适应能力。
机械臂运动学与路径规划研究
机械臂运动学与路径规划研究一、本文概述随着工业自动化的快速发展,机械臂作为重要的执行机构,在生产线上的应用越来越广泛。
机械臂的运动学和路径规划研究对于提高机械臂的工作效率、精度和稳定性具有重要意义。
本文旨在深入探讨机械臂的运动学原理,并在此基础上研究路径规划方法,以实现机械臂在复杂环境中的高效、准确操作。
文章首先将对机械臂的运动学基础进行介绍,包括机械臂的正向运动学和逆向运动学。
正向运动学主要研究已知机械臂关节参数时,末端执行器的位姿与关节角度之间的关系而逆向运动学则是已知末端执行器的位姿,求解出对应的关节角度。
在理解运动学原理的基础上,本文将进一步探讨机械臂的路径规划问题。
路径规划是指根据任务要求,为机械臂规划出一条从起始状态到目标状态的合理路径。
本文将介绍几种常用的路径规划方法,如基于关节空间的路径规划、基于笛卡尔空间的路径规划和基于优化算法的路径规划等。
同时,针对复杂环境中的路径规划问题,本文还将研究如何结合环境感知和决策技术,实现机械臂的智能路径规划。
通过本文的研究,旨在为机械臂的运动学和路径规划提供一套系统的理论框架和实践方法,为工业自动化领域的发展提供有益参考。
二、机械臂运动学基础机械臂运动学是研究机械臂运动规律的科学,主要关注机械臂的位置、速度和加速度等运动参数,而不涉及产生这些运动的力和力矩。
运动学分为正运动学和逆运动学两部分。
正运动学是根据已知的关节变量(如关节角度)来计算机械臂末端执行器的位置和姿态。
而逆运动学则是根据期望的末端执行器位置和姿态来求解所需的关节变量。
机械臂的运动可以通过多种坐标系来描述,其中最常见的是笛卡尔坐标系和关节坐标系。
笛卡尔坐标系以机械臂末端执行器的位置和方向为参数,直观易懂,但计算复杂。
关节坐标系则以每个关节的角度为参数,计算简单,但直观性较差。
对于机械臂的路径规划,运动学提供了基础。
路径规划是指确定机械臂从起始状态到目标状态的运动轨迹。
路径规划不仅要考虑运动的连续性和平滑性,还要考虑运动的可达性和避障性。
羽毛球机器人机械臂运动轨迹多目标规划

羽毛球机器人机械臂运动轨迹多目标规划应文杰;徐开;徐少平【摘要】In order to achieve the high-speed smooth movement to play the badminton continuously for the manipulator of badminton robot, this paper proposes a new multi-objective trajectory optimization model of manipulator. To begin with, the optimization establishes the pose expression of manipulator through successive coordinate transformation, according to D-H model. After that, it uses the Newton descent method to solve the disaggregation of inverse kinematics for the giv-en trajectory key points, then solves the optimal solution from the disaggregation of inverse kinematics by the shortest path algorithm. Finally, to achieve the continuous smooth trajectory of manipulator, it uses the cubic spline interpolation to establish the function of motors'rotating angle, evolving in time, in accordance with the optimal solution. The results of experiments show that the new trajectory optimization model can effectively reduce energy consumption of motor, in-crease the turning efficiency, and ensure the response rate of manipulator sequentially.%为了实现羽毛球机器人机械臂高速连续平滑地击打羽毛球动作,提出了一种新的多目标机械臂运动轨迹优化模型.首先,该轨迹优化模型根据D-H运动学模型,通过坐标变换建立机械臂的位姿表达式.然后,采用牛顿下山法求出给定路径关键点的运动学逆解集,并基于最短路径算法从逆解集中求出最优解.最后,根据所求出最优解,采用三次样条插值建立电机转角函数,以实现机械臂的连续平滑运动.实验结果表明:新的轨迹优化模型能够有效地降低电机能耗和提高转动效率,从而保证了机械臂响应速度.【期刊名称】《计算机工程与应用》【年(卷),期】2017(053)003【总页数】8页(P258-265)【关键词】轨迹规划;D-H模型;牛顿下山法;最短路径算法;三次样条插值【作者】应文杰;徐开;徐少平【作者单位】南昌大学信息工程学院,南昌 330031;南昌大学信息工程学院,南昌330031;南昌大学信息工程学院,南昌 330031【正文语种】中文【中图分类】TP241YING Wenjie,XU Kai,XU Shaoping.Computer Engineering andApplications,2017,53(3):258-265.目前,针对羽毛球机器人的研究较少,而针对球类运动机器人的研究主要集中在足球、乒乓球、网球等运动上[1-4]。
基于改进的RRT^()-connect算法机械臂路径规划
随着时代的飞速发展,高度自主化的机器人在人类社会中的地位与作用越来越大。
而机械臂作为机器人的一个最主要操作部件,其运动规划问题,例如准确抓取物体,在运动中躲避障碍物等,是现在研究的热点,对其运动规划的不断深入研究是非常必要的。
机械臂的运动规划主要在高维空间中进行。
RRT (Rapidly-exploring Random Tree)算法[1]基于随机采样的规划方式,无需对构型空间的障碍物进行精确描述,同时不需要预处理,因此在高维空间被广为使用。
近些年人们对于RRT算法的研究很多,2000年Kuffner等提出RRT-connect算法[2],通过在起点与终点同时生成两棵随机树,加快了算法的收敛速度,但存在搜索路径步长较长的情况。
2002年Bruce等提出了ERRT(Extend RRT)算法[3]。
2006年Ferguson等提出DRRT (Dynamic RRT)算法[4]。
2011年Karaman和Frazzoli提出改进的RRT*算法[5],在继承传统RRT算法概率完备性的基础上,同时具备了渐进最优性,保证路径较优,但是会增加搜索时间。
2012年Islam等提出快速收敛的RRT*-smart算法[6],利用智能采样和路径优化来迫近最优解,但是路径采样点较少,使得路径棱角较大,不利于实际运用。
2013年Jordan等通过将RRT*算法进行双向搜索,提出B-RRT*算法[7],加快了搜索速度。
同年Salzman等提出在下界树LBT-RRT中连续插值的渐进优化算法[8]。
2015年Qureshi等提出在B-RRT*算法中插入智能函数提高搜索速度的IB-RRT*算法[9]。
同年Klemm等结合RRT*的渐进最优和RRT-connect的双向搜基于改进的RRT*-connect算法机械臂路径规划刘建宇,范平清上海工程技术大学机械与汽车工程学院,上海201620摘要:基于双向渐进最优的RRT*-connect算法,对高维的机械臂运动规划进行分析,从而使规划过程中的搜索路径更短,效率更高。
机械手臂的轨迹规划与控制策略研究

机械手臂的轨迹规划与控制策略研究引言机械手臂是一种重要的工业机器人,广泛应用于生产制造、物流搬运、医疗服务等领域。
在机械手臂的操作过程中,轨迹规划和控制策略起着至关重要的作用。
本文将对机械手臂的轨迹规划和控制策略进行研究和分析,探讨其应用和发展前景。
一、机械手臂的轨迹规划1.机械手臂轨迹规划的重要性机械手臂的轨迹规划是指确定机械手臂在操作过程中的运动路径,包括位置、速度和加速度等方面的规划。
合理的轨迹规划可以确保机械手臂的稳定性、高效性和安全性,提高工作精度和效率。
2.常用的机械手臂轨迹规划方法目前,常用的机械手臂轨迹规划方法主要包括插补法和优化法。
插补法是将机械手臂的运动轨迹分段线性插补,常见的插补方法有线性插值法、圆弧插值法和样条插值法。
线性插值法简单直观,但对于复杂轨迹有一定的局限性;圆弧插值法适用于弯曲轨迹的规划,但对于非光滑曲线的插补效果较差;样条插值法能够更好地平滑轨迹,但计算复杂度高。
优化法是通过数学建模和优化算法求解最佳轨迹规划问题。
其中,最优控制和遗传算法是常用的优化方法。
最优控制方法通过最小化或最大化性能指标,寻找最佳控制信号,使机械手臂的运动轨迹最优。
遗传算法则通过模拟生物进化的过程,对机械手臂的轨迹进行优化。
3.机械手臂轨迹规划中存在的挑战机械手臂轨迹规划中存在着多样性和复杂性的挑战。
首先,机械手臂所处的工作环境多种多样,规划的轨迹需要适应不同的工作空间和约束条件。
其次,机械手臂的运动是非线性和多自由度的,轨迹规划需要克服非线性和高维度的问题。
此外,机械手臂的轨迹规划需要在保持稳定和安全的前提下,同时满足高效和灵活的要求。
二、机械手臂的控制策略1.机械手臂控制的基本概念机械手臂的控制策略是指通过对机械手臂的控制信号进行调节和优化,实现对机械手臂运动的准确控制。
机械手臂控制策略主要包括位置控制、速度控制和力控制等。
位置控制是指通过控制机械手臂的位置信号,使机械手臂在指定的目标位置与期望轨迹上运动。
基于时间-平滑性多目标的机械臂轨迹规划

基于时间-平滑性多目标的机械臂轨迹规划Time-jerk optimal trajectory planning for manipulators杨忠瑞,杨昌明,刘 渝,郑克峰,杜承宗YANG Zhong-rui, YANG Chang-ming, LIU Yu, ZHENG Ke-feng, DU Cheng-zong(西华大学 机械工程学院,成都 610039)摘 要:针对机械臂工作效率及工作中产生振动、磨损的问题,利用5次非均匀B样条曲线(nURBS),在关节空间中建立曲线端点的一阶导数与二阶导数均可指定的时间-位置曲线,通过引入nSGA-II(non-dominated Sorting Genetic Algorithm II)优化算法以运行效率最优与振动冲击最小为优化目标对机械臂运行轨迹进行优化,得到Pareto最优解。
对6R机械臂的仿真结果表明,由5次非均匀B样条曲线构造的轨迹提高了运行效率并减小了机械臂在运动过程中产生的振动与冲击,使得机械臂获得更优的工作性能。
关键词:机械臂;轨迹规划;多目标优化;5次非均匀B样条曲线中图分类号:TH249 文献标识码:A 文章编号:1009-0134(2021)04-0074-05收稿日期:2019-11-06基金项目:四川省科技计划项目(2019YFG0341)作者简介:杨忠瑞(1993 -),男,硕士研究生,研究方向为机械优化设计与神经网络。
0 引言机械臂广泛应用于焊接、堆垛等多种作业场合。
机械臂的轨迹规划是根据作业任务的要求,计算出预期的位移、速度和加速度等与时间有关的运动参数。
良好的轨迹规划能保证机械臂末端执行件更好的执行给定轨迹,完成工作任务。
但传统的轨迹规划通常只针对单目标进行优化:若为提高机械臂的工作效率,则将时间最短作为优化目标[1];若希望机械臂运行轨迹平滑[2,3],则将加加速度的的累加值最小化作为优化目标。
文献[4]构建三次样条曲线,通过改变系数的方式使启停时的速度与加速度得到保证,使用SQP 算法优化机械臂运行轨迹,采用加权的方法将不同的目标函数统一成单目标优化问题,但三次样条曲线无法对曲线做局部修改,且SQP 算法相较于启发式算法,对于复杂问题的计算能力有限。
机械臂控制器 机械臂运动控制与轨迹规划方法介绍

机械臂控制器机械臂运动控制与轨迹规划方法介绍机械臂控制器机械臂运动控制与轨迹规划方法介绍机械臂作为一种重要的自动化设备,广泛应用于工业生产线、仓储物流等领域。
机械臂的运动控制和轨迹规划是保证机械臂正常工作和高效运行的关键。
在本文中,我将介绍机械臂控制器的基本原理和常用的机械臂运动控制与轨迹规划方法。
一、机械臂控制器的基本原理机械臂控制器是实现机械臂运动控制的关键设备,其基本原理如下:1. 传感器数据采集:机械臂控制器通过内置传感器或外接传感器获取机械臂的位置、速度和力等数据。
2. 数据处理与分析:控制器对传感器采集到的数据进行处理和分析,得出机械臂当前位置及状态。
3. 控制命令生成:基于机械臂的当前状态,控制器生成相应的控制指令,包括力/位置/速度等。
4. 控制信号输出:控制器将生成的控制指令转化为电信号输出给机械臂执行机构。
5. 反馈控制:机械臂执行机构通过传感器反馈实际执行情况给控制器,以实现闭环控制和误差校正。
二、机械臂运动控制方法机械臂运动控制方法常见的有以下几种:1. 位置控制:通过控制机械臂的关节位置,实现精确的运动控制。
位置控制适用于需要机械臂准确到达目标位置的场景,如精密装配、焊接等。
2. 力控制:通过控制机械臂的力传感器,实现对执行器施加的力的控制。
力控制适用于需要机械臂对外界力做出动态响应的场景,如物料搬运、协作操作等。
3. 轨迹控制:通过控制机械臂的关节位置或末端执行器的位姿,实现沿预定轨迹运动。
轨迹控制适用于需要机械臂按照特定轨迹完成任务的场景,如拾取放置、喷涂等。
三、机械臂轨迹规划方法机械臂的轨迹规划方法决定了机械臂在特定任务中的运动轨迹。
1. 离散点插补:将机械臂的预定轨迹划分为多个点,通过插值计算相邻点之间的中间点,实现机械臂的平滑运动。
2. 连续路径规划:基于数学模型和运动学计算,实现对机械臂路径的连续规划和优化。
常用的连续路径规划方法包括样条曲线插值、最优化算法等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
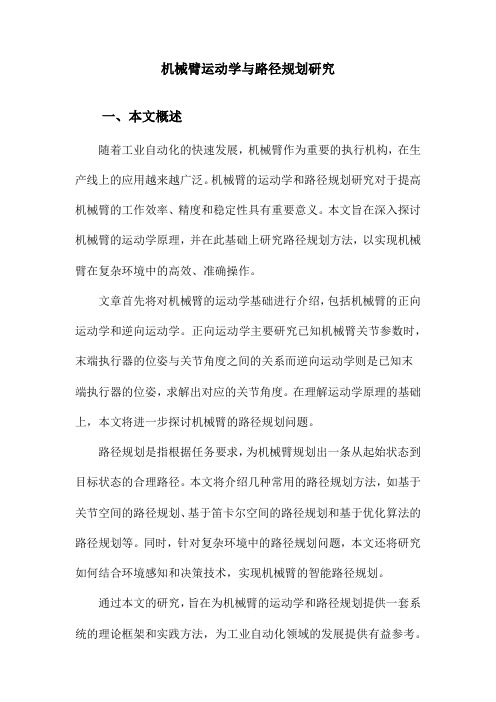
位姿1分析(由最初始状态到折叠状态,图中粉色线表示)1、运动学正解,求齐次变换矩阵(Matlab 编程)syms a1a2a3b1b2b3%各关节变量变化量a1=—28*pi/180; a2=28*pi/180; a3=0*pi/180;%各z轴间夹角b1=0;b2=0;b3=-pi/2;%求齐次变换矩阵由公式1iiT-= [ cos(a) -sin(a) 0 c ;sin(a)*cos(b) cos(a)*cos(b) -sin(b) -d*sin(b);sin(a)*sin(b) cos(a)*sin(b) cos(b) d*cos(b);0 0 0 1 ] 03T=01T*12T*23T=2*33由此可求出各其次变换矩阵T=[ 0.8829 0.4695 0 01-0.4695 0.8829 0 00 0 1.0000 00 0 0 1.0000]1T= [ 0.8829 -0.4695 0 245.000020.4695 0.8829 0 00 0 1.0000 00 0 0 1.0000]2T=[ 1.0000 0 0 030 0.0000 1.0000 204.00000 -1.0000 0.0000 0.00000 0 0 1.0000]T=[ 1.0000 0 0 216.3222 30 0.0000 1.0000 88.97950 -1.0000 0.0000 0.00000 0 0 1.0000]T= [ 1.0000 0 0 216.3222; 20 1.0000 0 -115.0205;0 0 1.0000 0;0 0 0 1.0000]1T=[ 0.8829 -0.0000 -0.4695 149.2278;30.4695 0.0000 0.8829 180.1213;0 -1.0000 0.0000 0.0000;0 0 0 1.0000]2、求雅克比矩阵由公式:z1 =[T10(1,3);T10(2,3);T10(3,3)];z2 =[T20(1,3);T20(2,3);T20(3,3)];z3 =[T30(1,3);T30(2,3);T30(3,3)];p1=[T31(1,4);T31(2,4);T31(3,4)];p2=[T32(1,4);T32(2,4);T32(3,4)];r1=[T10(1,1) T10(1,2) T10(1,3);T10(2,1) T10(2,2) T10(2,3);T10(3,1) T10(3,2) T10(3,3)];p11=cross(z1,r1*p1);p22=cross(z2,r2*p2);j=[p11(1,1) p22(1,1)p11(2,1) p22(2,1)p11(3,1) p22(3,1)z1(1,1) z2(1,1)z1(2,1) z2(2,1)z1(3,1) z2(3,1) ]J=[ -88.9795 -204.0000216.3222 00 00 00 01.0000 1.0000]3、运动学反解由程序:x=216.3222;y=88.9795;f1=x-T30(1,4);f2=y-T30(2,4);[a1,a2]=solve(f1,f2,a1,a2);a11=vpa(a1/pi*180,6);a22=vpa(a2/pi*180,6);可得出:a11= -28.000172.7177a22= 27.9999152.0004、操作速度分析syms q1q2v1v2v=[v1;v2;0;0;0;0];q=[q1;q2];je=j*q;f3=v(1,1)-je(1,1);f4=v(2,1)-je(2,1);[q1,q2]=solve(f3,f4,q1,q2)q11=vpa(q1,3);q22=vpa(q2,3);可得结果为:q11=0.462e-2*v2q22=-0.490e-2*v1-.202e-2*v2 5、各关节轨迹规划Matlab程序:% v(t)=diff(f(t),t)=a1+2*a2*t+3*a3*t^2 轨迹上的关节速度% a(t)=diff(f(t),t,2)=2*a2+6*a3*t 轨迹上的关节加速度% 由在起始点和终止点的关节速度要求,规定% v(0)=0 v(tf)=0,分别得出a1=a0=0%运动时间tf设为3s,关节角1终值为bf,初值为0syms a2a3tf t;bf=-28*pi/180;a1=0;a0=0;tf=3;f(tf)=a0+a1*tf+a2*tf^2+a3*tf^3-bf ;v(tf)=a1+2*a2*tf+3*a3*tf^2 ;[a2,a3]=solve(f(tf),v(tf),a2,a3)%绘制关节角随时间的变化的三次曲线t=0:0.01:tf;f3=a0+a1*t+a2*t.^2+a3*t.^3plot(t,f3)gridxlabel('时间t/s')ylabel('关节变量值/°')title('位姿1时关节角1轨迹规划曲线')subplot(1,3,2)v=a1+2*a2*t+3*a3*t.^2plot(t,v)gridxlabel('时间t/s')ylabel('关节角1的关节速度°/s ')title('位姿1时关节角1速度轨迹曲线')subplot(1,3,3)a=2*a2+6*a3*tplot(t,a)gridxlabel('时间t/s')ylabel('关节角1的加速度°/s^2 ')title('位姿1时关节角1加速度轨迹曲线')关节角1三次多项式差值曲线:关节角初值为0°,终值为-28°。
Figure.1关节角2三次多项式差值曲线:关节角初值为-90°,终值为28°。
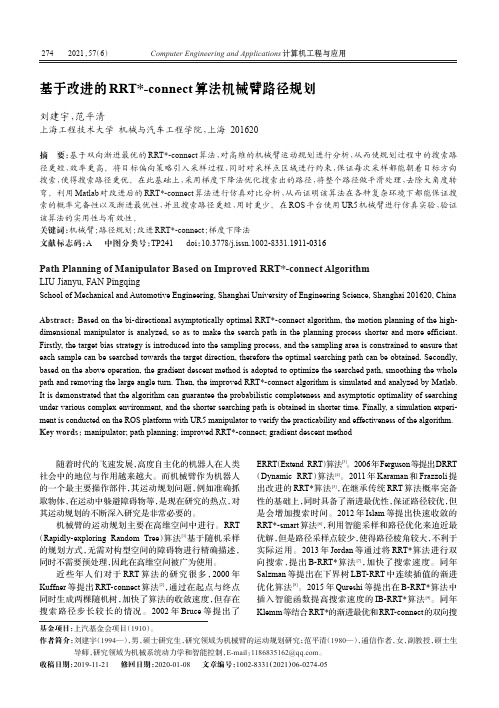
Figure.2二、位姿2分析(由折叠状态到抓球状态,以折叠状态为初始位姿,图中蓝色线表示)a1=—28*pi/180;a2=(-62)*pi/180; a3=0*pi/180;%各z轴间夹角b1=0;b2=0;b3=-pi/2;%求齐次变换矩阵1T=[ 0.8829 0.4695 0 0 -0.4695 0.8829 0 00 0 1.0000 00 0 0 1.0000] 12T=[0.4695 0.8829 0 245.0000 -0.8829 0.4695 0 00 0 1.0000 00 0 0 1.0000]23T=[ 1.0000 0 0 00 0.0000 1.0000 204.00000 -1.0000 0.0000 0.00000 0 0 1.0000]3T=[ 0.0000 0.0000 1.0000 420.3222 -1.0000 0.0000 0.0000 -115.02050 -1.0000 0.0000 0.00000 0 0 1.0000]2T= [0.0000 1.0000 0 216.3222 -1.0000 0.0000 0 -115.02050 0 1.0000 00 0 0 1.0000]13T=[0.4695 0.0000 0.8829 425.1213 -0.8829 0.0000 0.4695 95.77220 -1.0000 0.0000 0.00000 0 0 1.0000]2、求雅克比矩阵由上述可求出位姿2时的雅克比可求的雅克比矩阵为:J= [ 115.0205 -0.0000420.3222 204.00000 00 0求前述的齐次变换矩阵3,可得,X=420.3222, Y=-115.0205当a1,a2为变量时,求出03T的表达式x=420.3222;y=—115.0205;f1=x-T30(1,4);f2=y-T30(2,4);[a1,a2]=solve(f1,f2,a1,a2)a11=vpa(a1/pi*180,6)a22=vpa(a2/pi*180,6)求出结果为a11 = -2.60843-28.0001a22 = -118.000-61.9997其中(-28.001,-61.9997)为最优解4、操作速度分析设末端执行器的速度为v=[v1;v2;0;0;0;0],需要根据v的内容来求解关节的速度q=[q1;q2] Matlab程序syms q1 q2 q3 q4 q5 q6 v1 v2 v3 w1 w2 w3v=[v1;v2;0;0;0;0]q=[q1;q2]j=J*qf3=v(1,1)-j (1,1)f4=v(2,1)-j (2,1)[q1,q2]=solve(f3,f4,q1,q2)q11=vpa(q1,3)q22=vpa(q2,3)得到的结果为q1=0 .869e-2*v1q2 = 0.490e-2*v2-.179e-1*v15、各关节轨迹规划关节角1三次多项式差值曲线:关节角初值为-28°,终值为-28°。
Figure.3关节角2三次多项式差值曲线:关节角初值为28°,终值为-62°。
Figure.4。