一些国外键合图的-bond-graph
SimulationX与AEMsim
分析的图形
台上实现了多学科领域的系统工程
的建模和仿真:机械,液压,热等物理领域。不同领域的模块之间可以直接进行物理连接。
TypeDesigner:基于最先进的多物理领仿真语言Modelica,最灵活建模工具,可以在用户指南的帮助
下轻松编写自已的算法或数学方程组。更多,更灵活,独特的参数概念、输入和变量。
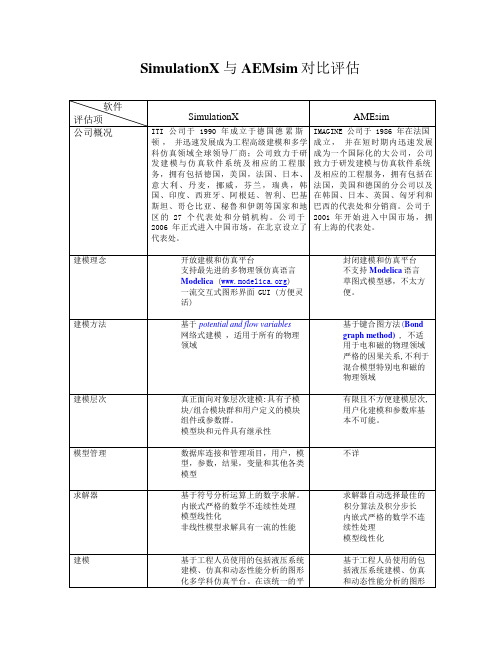
SimulationX与AEMsim对比评估
软件
评估项
SimulationX
AMEsim
公司概况
ITI公司于1990年成立于德国德累斯
顿,并迅速发展成为工程高级建模和多学科仿真领域全球领导厂商;公司致力于研发建模与仿真软件系统及相应的工程服
务,拥有包括德国,美国,法国、日本、意大利、丹麦,挪威,芬兰,瑞典,韩国、印度、西班牙、阿根廷、智利、巴基斯坦、哥仑比亚、秘鲁和伊朗等国家和地区的27个代表处和分销机构。公司于
2006年正式进入中国市场,在北京设立了代表处。
IMAGINE公司于1986年在法国
成立,并在短时期内迅速发展成为一个国际化的大公司,公司致力于研发建模与仿真软件系统
及相应的工程服务,拥有包括在法国,美国和德国的分公司以及在韩国、日本、英国、匈牙利和巴西的代表处和分销商。公司于
机构自由度_原动件和执行构件关系的一般问题研究

或两个以上的端口, 即一部分端口输入能量, 一部分
端口输出能量, 对机构的端口描述, 即是对其进行功
能描述或外部描述, 不涉及其内部结构. 一般地, 对
于一个有 n 个原动件(即能量或功率输入端口)和 m 个
en1+m2 1 = ⎡⎣e1 " ep
" en1
en+m1 +1 " eq
" en+m ⎤⎦T , (6)
in2 +m1 n1 + m2 =
⎡ ⎢ ⎢
in1
+1
#
1
" #
in1 +1 n1 #
⎢ ⎢
in 1
"
in n1
⎢ ⎢
in +1
1
"
in+1 n1
⎢# # #
in1 +1 n+m1 +1 #
" #
关键词 对偶 键合图 结型结构方程 原动件 执行构件 自由度
在机构理论中, 一般认为机构具有确定运动 规律的条件是机构的原动件数目等于机构自由 度[1,2]. 但在工程实践和理论研究中, 我们却见到许 多与之不符的情况, 如某巨型夹持机构的驱动轴(参 见图 1(a), 其机构自由度 w=1 而原动件数目为 3 个, 原动件数目>自由度, 即所谓的冗余驱动;又如广为 使用的差速器(参见图 2), 该机构自由度 w=2, 但只有 一个原动件, 由构件 2 输入, 即原动件数目<自由度, 称之为欠驱动. 类似实例我们还可举出很多.
功率键合图73页PPT

x11 v11 v12
v 2 q 2 q1 q 3 q 4 q 5 q 6
Sf
p2 R泄
p2 R节
p2 R阀
q8
111
Sf
( R泄
R节
R阀 ) p2
Av 12
状态变量表达式中变量包括:
储能元功率键上的因变量 P2
V12
F11
输入变量 Se Sf
阻性作用元 R泄 R节 R阀 R孔
利用功率键合图和MATLAB进行液压系统的 数字仿真,不仅可以对液压系统的动态特性进行 仿真分析,还可以通过改变仿真条件对液压系统 的工作过程进行仿真试验。
V12
1 I阀
P12
F11
1 C弹
x12
P2
1 C管
v2
第三步:应用键合图的规则及其变量间的逻辑关系,将 各状态变量的一阶导数(相当于原来的自变量) 推导成储能元功率键上的因变量及输入变量的代 数或函数关系。
P12F12F9 F10F11Ap8 Se F11 A(p6 p7)Se F11Ap2 AR孔q7
b.标注规则
决定功率键合图中功率键合图上两变量因果关系 的原则,是要便于建立起系统的数学模型-状态 方程,以及这种数学模型便于在计算机上求解。
各功率元的因果线标注请参考表1-2、表1-3。
表1-2
表1-3 功率键合图中常见的符号
三、建模与仿真
液压系统的仿真研究首先要建立系统的状态方程,功 率键合图是建模的有力工具。 从功率键合图推导状态方程的步骤: 1、与作用元有关; 2、与键合图中因果线的某些问题有关; 3、与系统中的时变非线性因素及某些软参量有关。
二、功率键合图的构成与符号 1、功率键(Power Bonds)
PLC毕设

摘要本装置是一种最为典型的机电一体化产品,是为职业院校、职业教育培训机构而研制的,适合机电一体化、电气自动化等相关专业的教学和培训。
本装置涵盖了机电一体化和电气自动化专业中所涉及的PLC控制、变频调速、步进调速、传感器检测、气动、机械结构安装与系统调试等内容。
为培养可持续发展的机电一体化高技能人才提供一个良好的平台.可编程控制器(Programmable Controller)简称PC或PLC。
它是一种新型通用的自动控制装置。
它将传统的继电器控制技术、计算机技术和通讯技术融为一体,专门为工业控制而设计,具有功能强、可靠性高、编程方便、体积小、重量轻等优点,因此在工业控制方面的应用极为广泛。
目前PLC技术、CAD/CAM技术和机器人技术已经发展成为现代工业自动化的三大支柱。
可编程控制器的出现开创了以微电子技术为核心的数字化电气控制技术的新局面。
关键词:光机电一体化 PLC控制传感器检测气动AbstractThe device is a typical mechatronics financial install mechanical components, pneumatic system, installation and commissioning, electrical installation and PLC control circuit programming, electrical and mechanical equipment installation and debugging, automatic control system installation and debugging in one, to meet the training teaching and competition needs.PLC (Programmable Controller) is2.4 装置基本配置 (6)referred to as PC or PLC. It is a new general-purpose automatic controlling device. It makes control technology, computer technology and communication technology a integration, which is specifically designed for industrial controlling. With strong functions, high reliability and convenient to program, small size, light weight, in the industrial control area it is extensively used. The current PLC technology, CAD / CAM technology and robot technology has developed into the three pillars of modern industrial automation. The emergence of programmable controllers creates a new situation in the digital electric control technology whose core is microelectronic technology.Key words: mechatronic PLC control sensor detection pneumatic目录第1章绪论1.1 课题来源北华航天工业学院机械电子工程教研室教师自拟课题。
高中化学必修二第一章 第三节化学键 课时1 离子键和共价键(共59张PPT)
•
下列有关离子化合物的说法正确的
是( )
• A.离子化合物一定易溶于水
• B.离子化合物由非金属元素和金属元素共
同组成
• C.熔融状态下能够导电的物质,一定是离
子化合物
• D.离子化合物在晶体状态下有离子存在,
但不导电
【解析】 离子化合物不一定易溶于水,如 AgCl、BaSO4等;离子化合物不一定由非金 属元素和金属元素共同组成,如NH4Cl等铵 盐全部由非金属元素组成;熔融状态能导电 的物质,不一定是离子化合物,如金属单质; 离子化合物由阴、阳离子构成,在晶体状态 下,离子不能自由移动,故不能导电。
• 【答案】 D
• 4.氯化钠是日常生活中人们常用的调味品。 在下列事实中,可以证明NaCl中一定存在离 子键的是( )
• (3)证明某化合物一定存在离子键的方法是看在熔融 状态下能否导电。
• 3.离子化合物
• (1)定义:由离子键构成的化合物叫做离子化 合物。
• (2)构成微粒:阴离子、阳离子。
• (3)主要物理性质:熔、沸点较高,硬度较大。
• (4)导电性:固态时不导电,溶于水或受热熔 化后导电。
• (5)溶解性:大多数离子化合物易溶于水,难 溶于汽油、苯、四氯化碳等有机溶剂。
子化合物 • C.离子化合物一定能导电 • D.只有在活泼金属元素和活泼非金属元素
化合时,才能形成离子键
• 【解析】 正确理解离子键和离子化合物的 内涵和外延才能解答本题。
• A项,离子键是指阴、阳离子间的静电作用, 包括引力和斥力二者的平衡;B项,离子键 形成的只能是离子化合物;C项,离子化合 物在熔融状态或水溶液里才能导电,D项NH 与活泼非金属元素之间也可形成离子键。
液压仿真软件的现状及发展趋势

液压仿真软件的现状及发展趋势王勇亮;卢颖;赵振鹏;孙方义【摘要】@@%随着液压仿真技术的发展,国内外出现了许多液压仿真软件,为该领域的技术人员提供了帮助.该文比较详细地介绍了多款国内外有着广泛影响的液压仿真软件的发展过程、功能和特点,并在此基础上阐述了液压仿真软件的发展趋势.【期刊名称】《液压与气动》【年(卷),期】2012(000)008【总页数】4页(P1-4)【关键词】液压仿真技术;计算机仿真;软件【作者】王勇亮;卢颖;赵振鹏;孙方义【作者单位】空军航空大学军事仿真技术研究所,吉林长春130022;空军航空大学军事仿真技术研究所,吉林长春130022;空军航空大学军事仿真技术研究所,吉林长春130022;空军航空大学军事仿真技术研究所,吉林长春130022【正文语种】中文【中图分类】TH1371 引言对液压元件或系统利用计算机进行仿真的研究和应用已有30多年的历史,随着流体力学、现代控制理论、算法理论、可靠性理论等相关学科的发展,特别是计算机技术的突飞猛进,液压仿真技术也日益成熟,越来越成为液压系统设计人员的有力工具,相应的仿真软件也相继出现。
目前,国内外主要有AMESim、Hopsan、ADAMS/Hydraulics、 EASY5、 Matlab/simulink、SIMUL-ZD、Dshplus、FluidSIM、automation studio、20-sim、HyPneu等11种液压仿真软件,本文对其中常用的液压仿真软件的特点和功能进行介绍,为从事液压传动与控制技术工作的工程技术人员提供帮助。
ADAMS、Matlab等软件相关文献介绍的较多,本文省略。
2 国内外液压仿真软件简介2.1 AMESim法国IMAGINE公司于1995年推出基于键合图的液压/机械系统建模、仿真及动力学分析软件,即AMESim,全称为 Advanced Environment for Performing Simulations of Engineering Systems(高级工程系统仿真建模环境),该软件包含IMAGINE技术,为项目设计、系统分析、工程应用提供了强有力的工具。
轮轨接触力学

轮轨接触力学Southwest Jiaotong University轮轨接触动力学报告—关于轮轨接触动力学的思考年级: 2021 级专业:载运工具应用工程姓名:刘新龙学号: 13217021关于轮轨接触动力学的思考提高机车运行速度和加大牵引能力是当今世界铁路开展的趋势, 而到达这一目的就必须深入轮轨关系的理论研究, 改善机车的粘着利用水平。
轮轨关系那么是机车车辆、轨道系统中最根本、最复杂的一个问题, 是特殊的、典型的三维滚动摩擦接触问题。
接触理论始于1882年,由H. Hertz发表的经典论文?论弹性固体的接触?。
他提出了椭圆接触面的假设, 把三维接触问题简化为弹性无限半空间问题。
Hertz的研究成果为接触理论奠定了坚实的根底,但Hertz理论仅局限于无摩擦外表及理想弹性固体, 对于轮轨这样复杂的三维滚动接触问题显然是不能准确求解的。
近几十年来, 国内外在轮轨滚动接触问题的理论研究和实验研究方面都取得了很大进展, 但随着铁路技术的不断提高, 使用解析解法解决轮轨关系问题的局限性也愈加突出。
在高速和重载的要求下, 轮轨的波磨问题、疲劳损伤问题变得更加严重, 而这些问题的产生都与轮轨间作用力有着直接的关系。
因此, 在现有轮轨滚动接触理论的根底上, 使用有限元方法以精确模拟轮轨的几何形状及其相互接触关系, 将是今后解决轮轨关系问题的主要途径。
不断增长的运输量, 要求铁路必须在保证平安的前提下, 增加货物列车的重量, 提高客运列车的速度和运行品质。
因此, 新型机车车辆的设计、制造和线路的建设与维护, 都迫切需要预知轮轨之间的动力作用特性。
而现在人类已经能够准确地模拟一个飞行体在宇宙空间的运动并进行精确控制, 但却不能精确摸拟铁路轮轨的相互作用。
可见轮——轨关系及车辆——线路相互作用仍然是铁道车辆动力学的中心课题。
机车车辆或者列车与铁道线路是一个整体系统在这个系统中, 它们相互关联, 相互作用。
因此在研究机车车辆动力学性能时不能简单地视线路为外激干扰。
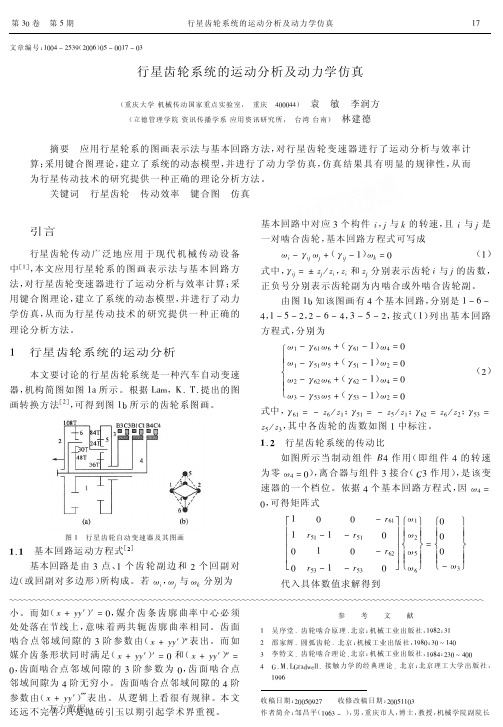
行星齿轮系统的运动分析及动力学仿真
! & " !’#,$ ) 因 为 ’ 为 原 动 件, $ ’!" , " !’#,$ + )+ 取 $ % & !, 则 行星传动特性参数 * % ’ % , + ! ’$ * - #, (() ( "! % & ( *" ’" ’
图’
・
系统的健合图模型
!’ $( $’ " !’ % & , % , $( !" ") " , " !" ( ( "" % $ "!" % & $ !!!#, % # *" ’" ’ + !,) ! 式中," !" % ! % " % 。 !" + ! +)
!
行星齿轮系统的运动分析
本文要讨论的行星齿轮系统是一种汽车自动变速
器, 机构简图如图 !+ 所示。根据 ,+-,. / 0 / 提出的图
[%] 画转换方法 , 可得到图 !1 所示的齿轮系图画。
式中, ")! 3 $ % ) & % ! ; "&! 3 $ % & & % ! ; ")% 3 % ) & % % ; "&’ 3 其中各齿轮的齿数如图 ! 中标注。 %& & %’ , ! !" 行星齿轮系统的传动比 如图所示当 制 动 组 件 ’ # 作 用 (即 组 件 # 的 转 速 为零 !# 3 ") , 离合器与组件 ’ 接合 ( ( ’ 作 用) , 是该变 速器的一个档位。依据 # 个基本回路方程式, 因 !# 3 可得矩阵式 ", ! ! " " " ) &! $ ! ! ) &’ $ ! " $ ) &! " $ ) &’ $ ) )! !! " " !% " 3 $ ) )% !& " $ ! ’ " !)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
R : Bmot
C :1/ ksh
u
Moteur
1
DC
Arbre
2
Pignon +
F
Piston
P
Cylindre +
-Penv
i
1
2
crémaill
V
Q
Orifice
Q0
13
Moteur DC arbre
Orifice
Pignon
Cylindre Piston
Crémaillère
u i
Représentation graphique des transferts de puissance Langage unifié pour tous les domaines physiques (analogie) Modèle BG d’un système :
entre le schéma physique et les modèles mathématiques visualisation de la causalité Hypothèse : paramètres localisés
de puissance)
m
f1 = f2 =...= fn ai ei = 0
e1 = m . e2 f2 = m . f1
même vitesse, débit vol, courant, …
levier, poulies embrayages, transfo elect. transducteur
volume nombre de moles
entropie
6
Introduction Principes et langage Applications Conclusion
Eléments du langage bond graph
• 3 éléments passifs (reçoivent la puissance) – R : dissipation d’énergie – C , I : stockage d’énergie
Enseignéde façon récurrente àECLille, INSA Lyon, INSA Toulouse, Sup Elec Rennes,
ENSAM Paris,…
Des conférentes d’initiation dans de nombreuses écoles d’ingénieurs
• arrivée en Europe : fin des 70s – Pays-Bas (Twente Univ.) – France (Alsthom)
R.Rosenberg H. Paynter D. Karnopp D. Margolis
International Conference on Bond Graph Modelling Phoenix, Arizona, Janvier 2001
4
Introduction Principes et langage Applications Conclusion
Moteur DC Arbre
Orifice
Pignon
Piston Crémaillère
Cylindre
bond graph àmots
u Moteur DC
i
1 1
Arbre
déplacement angle
charge
Hydraulique Chimique
Thermodynamique
pression
potentiel chimique température
débit volumique flux molaire
flux d’entropie
moment de pression
moteur,
GY
e1 = r . f2
capteur àeffet
r
e2 = r . f1
Hall
transducteur
9
Moteur DC arbre
Orifice
Pignon
Cylindre Piston
Se : u
Crémaillère
I : Lr
I : J mot
I : mcrem
C : Ccyl R : Rorif
Pneumatique
5
Introduction Principes et langage Applications Conclusion
Variables généralisées
Variables de puissance
Variables d’énergie
Domaine
Mécanique Translation
Eléments de Jonction
Elément
Symbole Loi générique Exemples
e1 = e2 =...= en
même force,
pression,
0
ai fi = 0
tension, …
Eléments de
Jonction
1
(conservative
TF
restriction hydraulique
Dissipation d’énergie (chaleur)
ressort, réservoir
stockage d’énergie
C C ( e, q ) = 0
condensateur élasticité,
(potentielle, électrique)
59651 Villeneuve d’Ascq Cedex, France E-mail : gdt@ec-lille.fr
1
Plan
• Introduction • Principes et langage bond graph • Exemples d’applications industrielles • Conclusion
Rotation
Electrique
Effort e
force couple
tension
Flux
Moment
Déplacement
f
p edt
q fdt
vitesse vitesse angulaire
courant
moment moment angulaire
flux magnétique
12
Moteur DC arbre
Orifice
Pignon
Cylindre Piston
I : LA
u
1
i
R : RA
Crémaillère
I : J mot
I : mcrem
C : Ccyl
R : Rorif
GY
1
1
0
2
2
Fm
1
TF
F
1
P
TF
0
P
Penv
1
1
2
: rp
V
V Ap
Q0
actifs Sf
Eléments Passifs
e indep de f f indep de e
gravité, générateur de tension
pompe générateur de courant
Apport de puissance
R R ( e, f ) = 0 damping, friction, résistance électrique
1
GY
1
1
2 0
2 1
Fm
TF
F
1
TF
P
0
1
ir
:k
1
2
: rp
V
: Ap
P
Q0
Se : - Penv
R : Rr
mcc
R : Bmot C :1/ ksh
arbre pignon + crémaillère piston cylindre+orifice 10
Introduction Principes et langage Applications Conclusion
compressibilité
stockage d’énergie
I I ( p, f ) = 0
masse, inertie, bobine
(cinétique,
magnétique)
8
Introduction Principes et langage Applications Conclusion
Jonction 0 :
i4 iL
uR2 uC u4 uC iC i4 iR2
Se : E
I:L C:C
2
5
1
0
1
4
3
6
R : R1 R: R2
* Lois des éléments
uR1 R1.iR1 iR2 1 R2 .uR2
iL 1 L uL dt uC 1 C iC dt
Causalité
• visualisation, au sens schéma - bloc, des relations – de cause àeffet – entrée - sortie – donnée – inconnue
• un des avantages majeurs de la technique bond graph – pour écrire systématiquement les équations – pour détecter des incohérences dans les équations – pour parcourir le bond graph comme un graphe • chemin causal, boucle causale