一些国外键合图的bondgraph
第5章蛋白质化学-蛋白质的三维结构ppt课件

具有独立三级结构的多肽链单位,称为亚基 或亚单位(subunit),亚基可以相同,亦可以不同。 四级结构的实质是亚基在空间排列的方式。
(二)亚基的缔合
血红蛋白(Hb)是四个亚基缔合而成,聚合动力:疏 水作用(主要),二硫键,离子键,氢键等。
纤维状蛋白质是结构蛋白,含大量的α-螺旋, β-折叠片,整个分子呈纤维状,广泛分布于脊椎和 无脊椎动物体内,起支架和保护作用。角蛋白来 源于外胚层细胞,包括皮肤以及皮肤的衍生物:发, 毛,鳞,羽,翮,甲,蹄,角,爪,啄等.角蛋白可分为α-角 蛋白和β- 角蛋白。
α-角蛋白,如毛发中主要蛋白质。β-角蛋白, 如丝心蛋白。
结构域间的裂缝,常是酶的活性部位,也是反应物的 出入口
三、蛋白质三级结构
(一).三级结构的特点 (二). 肌红蛋白(Mb)的构象 (三). 一级结构与三级结构的关系 (四).维持三级结构的作用力
(一)三级结构的特点
一条多肽链中所有原子在三维空间的整 体排 布,称为三级结构,是包括主、侧链在内的空间 排列。大多数蛋白质的三级结构为 球状或近似球 状。在三级结构中,大多数的亲水的R侧基分布 于球形结构的表面,而疏水的R侧基分布于球形 结构的内部,形成疏水的核心。
三级结构形成后,生物学活性必需基团靠近,形成活 性中心或部位,即蛋白质分子表面形成了某些发挥生物学 功能的特定区域。
(三) 一 级 结 构 与 三 级 结 构 的 关 系
四、寡聚蛋白的四级结构
(一)寡聚蛋白的概念 (二)亚基的聚合 (三)亚基的空间排布 (四)血红蛋白(Hb)的构象
(一) 寡聚蛋白的概念
主要的化学键 包括:疏水键、 离子键、氢键 和 范德华力等。
掘进机中间输送机液压系统的建模与仿真

中间输送机是掘进机的重要组成部分, 其性能决定了整机的输送能力。 采用液压驱动的中间输送机具 有体积小、 工作平稳等特点, 其液压系统的动态性能决定该机构工作质量与可靠性. 建立中间输送机液压 系统的数学模型并进行仿真是研究该系统动态特性的有效方法. 按功率键合图能有规则地导出相应的仿 真模型, 使所建立的仿真模型较其他方法更详尽, 与系统实际特征更相符, 从而可更全面、 更准确地揭示系 统的动态特性及其各部分的动态变化规律.本文基于功率键合图理论, 对掘进机输送机构的液压系统进行 了建模和仿真.
掘进机中间输送机工作.
2
系统的功率键合图
把系统看成相互作用的多个子系统, 它们之间在其相互联接的地 (通口)进行功率传递, 按系统中各
基金项 目 国家自 然科学基金资助项目(59774033) ; 辽宁省教育厅重大基础研究资助项目 (202182053) 作者简介 李晓豁( 1953 一) , 辽宁锦州人, 教授, 博士生导师,
摘要: 建立了掘进机中间输送机液压系统的功率键合图, 根据与其变量间的逻辑关系, 导出了系统的状态方程 利用所建立的数学模型, Simulink 环境下实现了其动态特性的仿真, 在 得到了液压马达进口 压力变化的过程.
关键词: 掘进机; 中间输送机; 液压系统; 功率键合图; 动态仿真 中图分类号: TD 42
八
P9
q 12
图2 中间输送机液压系统的功率键合图 Fig.2 Power bond graph of the hydraulic system of middle conveyor on roadheader
3
系统数学模型
应用功率键合图的规则及其变量间的逻辑关系, 将各状态变量的一阶导数推导成储能元功率键上的 因变量及输人变量的代数式函数关系, 就可以很方便地导出系统的状态方程. 由 键合图模型得到的 8个状
SimulationX与AEMsim
分析的图形
台上实现了多学科领域的系统工程
的建模和仿真:机械,液压,热等物理领域。不同领域的模块之间可以直接进行物理连接。
TypeDesigner:基于最先进的多物理领仿真语言Modelica,最灵活建模工具,可以在用户指南的帮助
下轻松编写自已的算法或数学方程组。更多,更灵活,独特的参数概念、输入和变量。
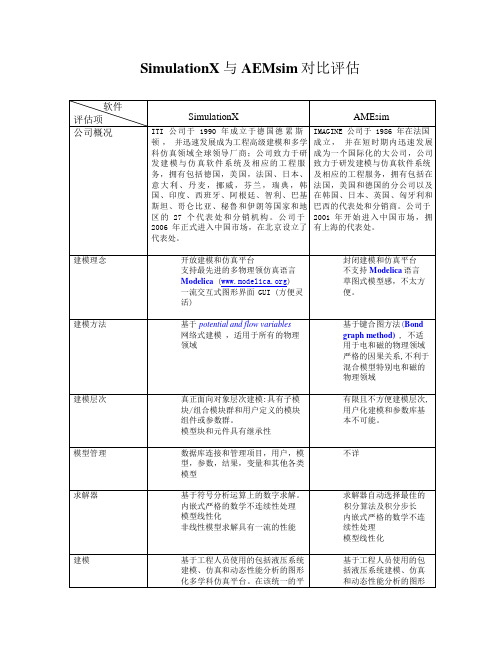
SimulationX与AEMsim对比评估
软件
评估项
SimulationX
AMEsim
公司概况
ITI公司于1990年成立于德国德累斯
顿,并迅速发展成为工程高级建模和多学科仿真领域全球领导厂商;公司致力于研发建模与仿真软件系统及相应的工程服
务,拥有包括德国,美国,法国、日本、意大利、丹麦,挪威,芬兰,瑞典,韩国、印度、西班牙、阿根廷、智利、巴基斯坦、哥仑比亚、秘鲁和伊朗等国家和地区的27个代表处和分销机构。公司于
2006年正式进入中国市场,在北京设立了代表处。
IMAGINE公司于1986年在法国
成立,并在短时期内迅速发展成为一个国际化的大公司,公司致力于研发建模与仿真软件系统
及相应的工程服务,拥有包括在法国,美国和德国的分公司以及在韩国、日本、英国、匈牙利和巴西的代表处和分销商。公司于
基于功率键合图的风力发电系统建模

基于功率键合图的风力发电系统建模郑海燕;解秀勋;么艳香【摘要】为了建立风力发电系统并网统一模型,表征风力发电系统的物理结构,以功率键合图建模理论为基础,建立风力发电系统的功率键合图全局模型.首先,简单介绍了功率键合图的状态变量、标准元件和功率键等基本概念.然后,建立风力发电系统的功率键合图全局模型,包括空气动力系统模型、机械传动系统模型、发电机模型、功率变换器模型和电网模型.最后,基于20-sim仿真平台,结合风力发电系统的实际参数,在假设风速输入下,验证该模型可如实描述风力发电系统的动态特性.在实际风速输入情况下,将模型的输出功率、转矩与实际风力发电系统输出功率、转矩进行对比,进一步验证了模型的正确性和适用性.【期刊名称】《广东电力》【年(卷),期】2018(031)009【总页数】6页(P77-82)【关键词】风力发电系统;功率键合图;模型;假设风速;实际风速;20-sim【作者】郑海燕;解秀勋;么艳香【作者单位】潍坊科技学院,山东寿光262700;石家庄科林电气股份有限公司,河北石家庄050200;中国农业大学,北京100083【正文语种】中文【中图分类】TN614化石能源的日益衰竭,促使人类高度关注太阳能、风能、地热能等可再生能源[1],以风力发电为代表的新能源发电正逐步成为重要的电力能源来源[2]。
目前,我国的风力发电正处在快速稳步发展阶段,风电在电力系统中的渗透率逐步升高[3-4]。
风力发电机结构复杂,风力发电系统涉及电磁、机械、液压等多个领域,是典型的多能域复杂系统[5-6]。
采用传统的数学建模方法建立风力发电系统模型,不仅不能直观地表示系统的物理结构,而且难以得到统一的全局模型。
功率键合图作为一种图论建模方法,不仅能够用统一的系统性方法建立多能域复杂系统的模型,而且能够表示系统的物理结构,使系统的分析更直观[7]。
国内外已有一些学者应用功率键合图理论建立风力发电系统模型,并进行了分析。
PLC毕设

摘要本装置是一种最为典型的机电一体化产品,是为职业院校、职业教育培训机构而研制的,适合机电一体化、电气自动化等相关专业的教学和培训。
本装置涵盖了机电一体化和电气自动化专业中所涉及的PLC控制、变频调速、步进调速、传感器检测、气动、机械结构安装与系统调试等内容。
为培养可持续发展的机电一体化高技能人才提供一个良好的平台.可编程控制器(Programmable Controller)简称PC或PLC。
它是一种新型通用的自动控制装置。
它将传统的继电器控制技术、计算机技术和通讯技术融为一体,专门为工业控制而设计,具有功能强、可靠性高、编程方便、体积小、重量轻等优点,因此在工业控制方面的应用极为广泛。
目前PLC技术、CAD/CAM技术和机器人技术已经发展成为现代工业自动化的三大支柱。
可编程控制器的出现开创了以微电子技术为核心的数字化电气控制技术的新局面。
关键词:光机电一体化 PLC控制传感器检测气动AbstractThe device is a typical mechatronics financial install mechanical components, pneumatic system, installation and commissioning, electrical installation and PLC control circuit programming, electrical and mechanical equipment installation and debugging, automatic control system installation and debugging in one, to meet the training teaching and competition needs.PLC (Programmable Controller) is2.4 装置基本配置 (6)referred to as PC or PLC. It is a new general-purpose automatic controlling device. It makes control technology, computer technology and communication technology a integration, which is specifically designed for industrial controlling. With strong functions, high reliability and convenient to program, small size, light weight, in the industrial control area it is extensively used. The current PLC technology, CAD / CAM technology and robot technology has developed into the three pillars of modern industrial automation. The emergence of programmable controllers creates a new situation in the digital electric control technology whose core is microelectronic technology.Key words: mechatronic PLC control sensor detection pneumatic目录第1章绪论1.1 课题来源北华航天工业学院机械电子工程教研室教师自拟课题。
人工智能之知识图谱

图表目录图1知识工程发展历程 (3)图2 Knowledge Graph知识图谱 (9)图3知识图谱细分领域学者选取流程图 (10)图4基于离散符号的知识表示与基于连续向量的知识表示 (11)图5知识表示与建模领域全球知名学者分布图 (13)图6知识表示与建模领域全球知名学者国家分布统计 (13)图7知识表示与建模领域中国知名学者分布图 (14)图8知识表示与建模领域各国知名学者迁徙图 (14)图9知识表示与建模领域全球知名学者h-index分布图 (15)图10知识获取领域全球知名学者分布图 (23)图11知识获取领域全球知名学者分布统计 (23)图12知识获取领域中国知名学者分布图 (23)图13知识获取领域各国知名学者迁徙图 (24)图14知识获取领域全球知名学者h-index分布图 (24)图15 语义集成的常见流程 (29)图16知识融合领域全球知名学者分布图 (31)图17知识融合领域全球知名学者分布统计 (31)图18知识融合领域中国知名学者分布图 (31)图19知识融合领域各国知名学者迁徙图 (32)图20知识融合领域全球知名学者h-index分布图 (32)图21知识查询与推理领域全球知名学者分布图 (39)图22知识查询与推理领域全球知名学者分布统计 (39)图23知识查询与推理领域中国知名学者分布图 (39)图24知识表示与推理领域各国知名学者迁徙图 (40)图25知识查询与推理领域全球知名学者h-index分布图 (40)图26知识应用领域全球知名学者分布图 (46)图27知识应用领域全球知名学者分布统计 (46)图28知识应用领域中国知名学者分布图 (47)图29知识应用领域各国知名学者迁徙图 (47)图30知识应用领域全球知名学者h-index分布图 (48)图31行业知识图谱应用 (68)图32电商图谱Schema (69)图33大英博物院语义搜索 (70)图34异常关联挖掘 (70)图35最终控制人分析 (71)图36企业社交图谱 (71)图37智能问答 (72)图38生物医疗 (72)图39知识图谱领域近期热度 (75)图40知识图谱领域全局热度 (75)表1知识图谱领域顶级学术会议列表 (10)表2 知识图谱引用量前十论文 (56)表3常识知识库型指示图 (67)摘要知识图谱(Knowledge Graph)是人工智能重要分支知识工程在大数据环境中的成功应用,知识图谱与大数据和深度学习一起,成为推动互联网和人工智能发展的核心驱动力之一。
键合图理论在三轴差动机构效率分析中的应用
键合图理论在三轴差动机构效率分析中的应用李庆凯;唐德威;姜生元;邓宗全【摘要】To carry out the analysis and calculation of the transmission efficiency of tri-axial differential mechanism better, the theory of bond graph is applied to the analysis of power flow of the tri-axial differential mechanism utilizing the characteristic of power fluxion of bond graph. According to the transmission relationship and method of absolute speed, the bond graph model of the tus of the internal power flow of the tri-axial differential mechanism restricted by speed is established. The stamechanism, as well as the power flow of the conversion mechanism of the differentials, is got by simulation. The result of the simulation shows that the tri-axial differential mechanism belongs to the power conflux mechanism, and there is no circulated power and no possibility of self-locking. Based on the result of power flow, the transmission torque is analyzed, and the efficiency can be computed easily. This method is more systematic than the traditional method, and is convenient to be solved by computer.%为了更好地对三轴差动机构的传动效率进行分析计算,利用键合图功率流动的特点,将键合图理论应用到三轴差动机构功率流的分析中.根据三轴差动机构的传动关系,采用绝对速度法,建立其在速度约束下的键合图模型,并进行相应的仿真计算,得到三轴差动机构在不同速度约束下的内部功率流以及各差速器转换机构的功率流情况.仿真结果表明:三轴差动机构属于功率汇流型机构,无循环功率存在,不存在自锁的可能性.以得到的功率流情况为基础,进行三轴差动机构的力矩传递特性分析以及传动效率的计算.该方法比传统方法更具系统性,便于使用计算机求解.【期刊名称】《哈尔滨工业大学学报》【年(卷),期】2011(043)011【总页数】5页(P44-48)【关键词】三轴差动机构;键合图;轮系;功率流;效率【作者】李庆凯;唐德威;姜生元;邓宗全【作者单位】哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001【正文语种】中文【中图分类】TP24当轮式管道机器人通过弯管时,由于各驱动轮走过的实际弧长不同,某些驱动轮成为事实上的制动轮而使机器人产生运动干涉,从而降低了机器人的有效拖动力和加剧了传动部件的磨损.为解决这一问题,将三轴差动机构应用于轮式管道机器人中,各驱动轮可通过三轴差动机构根据管道形状自动调节其转速,有效地解决了轮式管道机器人通过弯管时的产生的运动干涉问题[1].由于三轴差动机构的传动关系较为复杂,其机械效率是评估该机构能否在工程实际中应用的一项重要指标,需要从理论上对该机构进行效率的分析.而轮系的功率流情况是进行效率分析的基础.目前对轮系进行功率流分析时,一般采用离散法对轮系的功率流进行判别[2-3],但此方法在应用上,需要以人工方式判断功率传递的方向,判别过程较为繁琐,容易发生错误,不适用于较为复杂的轮系的功率流分析.键合图(Bond Graph)理论是20世纪60年代初由美国的H.M.Paynter教授所提出的系统动力学建模统一化方法[4],经多年的研究及发展[5-10],已得到了实际应用[11-12].本文利用键合图功率流动的特点,将键合图理论应用到三轴差动机构功率流的分析中,以得到的三轴差动机构的功率流情况为基础,对三轴差动机构的力矩传递特性进行分析及效率计算.1 三轴差动机构原理简介三轴差动机构是一个3自由度机构,由空间分布的4个普通圆锥齿轮差速器按一定关系组成,其传动原理如图1所示.右侧3个称为主差速器Ⅰ、Ⅱ、Ⅲ,左侧一个称为分动器Ⅳ,其中主差速器Ⅲ通过惰轮ID与分动器Ⅳ系杆轴H4的直齿轮相啮合.由主输入齿轮A0输入主运动ωA0,由3个差速器的系杆轴H1、H2 和H3 输出运动ωH1、ωH2、ωH3.图1 三轴差动机构原理图[1]该机构具有由1个输入运动获得3路差动输出运动的功能,且当输入转速一定时,3个输出轴的转速比决定于外部环境的几何约束关系,有在不考虑功率损失的前提下,三轴差动机构3个输出轴的输出转矩相等且为输入转矩的三分之二,即2 三轴差动机构的键合图模型2.1 主差速器的键合图模型的建立主差速器Ⅰ、Ⅱ、Ⅲ及分动器Ⅳ形式一致,均属于2K-H行星轮系,以主差速器Ⅰ为例进行键合图模型建立过程的说明.如图1所示,主差速器Ⅰ有系杆轴H1、行星轮C1、中心轮A1和B1这4个基本构件,其转速分别为ωH1、ωC1、ωA1和ωB1,则其转速关系为由式(3)得到两个相对速度(ωA1-ωH1)和(ωB1-ωH1),结合4个绝对速度ωH1、ωC1、ωA1和ωB1,可按绝对速度法建立主差速器Ⅰ的键合图模型.1)对4个构件的绝对速度和2个相对速度建立相应的1结;2)在相应的1结之间键间TF元和0结,用以建立相关速度之间的关系,并根据速度之间的关系标注功率流向;3)将模拟转动惯量的惯性元件键接在相应的1结上;4)对建立的键合图模型标注合适的因果关系.在不考虑传动功率损失的前提下,建立的主差速器Ⅰ的键合图模型如图2所示,图中IH1、IA1、IB1、IC1为 4 个基本构件的转动惯量,TH1、TA1、TB1为 3 个绝对速度ωH1、ωA1、ωB1为对应的势变量,变换器TF1=TF2=1.图2 主差速器Ⅰ的键合图模型从式(4)可知主差速器Ⅰ的键合图模型满足差速器的基本关系.主差速器Ⅱ、Ⅲ与分动器Ⅳ的键合图模型与主差速器Ⅰ的键合图模型形式一致,只是惯性元件的参数不同而已.从图2可以得到主差速器Ⅰ的静态关系为2.2 三轴差动机构键合图模型的建立根据图1所示的三轴差动机构的传动原理,在主差速器Ⅰ、Ⅱ、Ⅲ与分动器Ⅳ之间键入相应的变换器TF、惯性元件I及容性元件C,将这4个基本单元相连接;当管道机器人在弯管内匀速运行时,驱动轮的速度受到管道环境的约束,因此在系杆轴 H1、H2、H3 处添加相应的流源 Sf1、Sf2、Sf3作为速度约束;动力由输入齿轮A0提供,因而在输入端添加一个势源Se0作为动力输入源;由于3个主差速器的功能形式一致,因此只需对主差速器Ⅰ进行单独标号,建立的三轴差动机构的键合图模型如图3所示.经验证该键合图的静态关系满足式(1)和(2).同时为便于仿真计算,将三轴差动机构的键合图用虚线划分为3个主差速器、分动器以及动力输入5个模块.图3 三轴差动机构的键合图模型图3中IID为惰轮ID的转动惯量;IA0为主输入齿轮A0的转动惯量;IH4、IC4、IA4和IB4分别为分动器Ⅳ的系杆轴H4、行星轮C4、中心轮A4和B4的转动惯量,相应位置的主差速器Ⅱ、Ⅲ的惯性元件与主差速器Ⅰ的惯性元件一一对应.容性元件 CH1、CH2、CH3、CH4 为系杆轴 H1、H2、H3、H4 扭转刚度的倒数;在建立键合图模型时,有时为了顺利地实现因果关系的划分,在不影响系统原理的前提下,可在相应的图元之间添加一个0结和刚度很大的容性元件C0,从而改变相应键的因果关系,如主差速器Ⅰ中与键16、21及另外两个主差速器对应键相连接的容性元件;由于齿轮之间的啮合刚度较大,因此可忽略其柔度并将其作为刚性传动考虑.3 键合图模型的仿真3.1 键合仿真模型的建立键合图模型可以很方便地转换为控制工程领域中用来表示信号流的方块图,而方块图可以使用现有控制工程理论求解且可利用Simulink进行仿真计算.根据图3中划分的各个模块,建立相应的方块图,并将各模块相连利用Simulink进行仿真计算,如图4所示.由于建立的键合图模型考虑了扭转刚度,因此该仿真模型属于刚性系统,采用ode23tb的积分方法进行求解.通过改变速度输入源Sf1、Sf2和Sf3之间的大小关系进行仿真,即可得到三轴差动机构在不同工况下的功率流情况.图4 三轴差动机构的Simulink仿真模型从三轴差动机构键合图建立及求解的过程可以看出,只要已知任意复杂轮系的传动关系,就可以建立该轮系的键合图模型进行仿真计算,而且模型的参数修改较为方便.3.2 三轴差动机构的功率流由于从键合图可以得到任一所关心的变量以及键合图各构件之间功率传递的特点,可以通过键合图模型的求解对主差速器与分动器之间的功率流向,以及各单元转换机构的功率流向进行判别.以主差速器Ⅰ与分动器的连接键18为例,当e18·f18>0时,功率由主差速器Ⅰ流向分动器;当e18·f18<0时,功率由分动器Ⅳ流向主差速器Ⅰ;当e18·f18=0时,由主差速器Ⅰ与分动器之间无功率流动.另外需要对主差速器及分动器的转换机构的功率流向进行判别.以主差速器Ⅰ为例进行说明,当TH1·(ωA1-ωH1)>0时,在转换机构中功率由中心轮A1流向中心轮B1;当TH1·(ωA1-ωH1)<0时,在转换机构中功率由中心轮B1流向中心轮A1;当TH1·(ωA1-ωH1)=0时,转换机构中无功率流动,即主差速器Ⅰ不差动.由于主差速器Ⅰ、Ⅱ形式和分动器间的传动路线一致,因此系杆转速ωH1和ωH2地位相同,当3个输出转速不全相等且不等于输入转速的一半时,可将速度输入分为以下几种情况:1)ωH1≥ ωH2>0.5ωA0>ωH3,2)ωH1>0.5ωA0>ωH2≥ ωH3,3)ωH1≥ ωH3>0.5ωA0>ωH2,4)ωH1>0.5ωA0>ωH3≥ ωH2,5)ωH3≥ ωH1>0.5ωA0>ωH2,6)ωH3>0.5ωA0>ωH1≥ ωH2.通过仿真可得各种速度约束下三轴差动机构的功率流情况,如图5所示.图中三轴差动机构的基本构件用“●”来表示,主差速器及分动器分别由4个“●”组成一个单元,图中实线表示构件之间的功率传递,虚线表示主差速器及分动器的转换机构中功率的流动情况,箭头表示功率的流动方向.其中工况2)和4)的功率流一致,3)和5)的功率流一致.另外,当ωH2>ωH1时,分动器转换机构中功率由A4流向B4;当ωH2=ωH1时,分动器转换机构中无功率流动.当3个输出转速有1个转速等于输入转速的一半时,该转速对应的主差速器与分动器间无功率流动;当3个输出转速相等时,分动器无功率输入,即分动器不工作,相当于机器人在直管中运行.通过对三轴差动机构不同速度约束下的功率流情况进行分析,根据的得出的功率流图,可知该机构属于功率汇流型,无循环功率存在,不存在自锁的可能性.4 效率计算在得到三轴差动机构各差速器间的功率流向及各差速器转换机构的功率流向后,便可进行三轴差动机构的力矩特性分析,从而对三轴差动机构的效率进行计算.由于受篇幅限制,只对图5(a)的功率流情况进行效率分析.图5 不同速度约束下的三轴差动机构的功率流图对动力输入齿轮A0进行受力分析,可得式中:TA0为主输入齿轮A0的输入力矩;T'Ai为差速器内部对中心齿轮Ai的作用力矩,其中i=1,2,3;TAi为差速器外部对中心齿轮Ai的作用力矩,其中i=1,2,3,且=-TAi;i0为初级传动比,i0=-1;η0为单对直齿轮的传动效率.对3个主差速器及分动器有力矩平衡关系为式中:TAi为差速器外部对中心齿轮Ai的作用力矩;TBi为差速器外部对中心齿轮Bi 的作用力矩;THi为差速器外部对系杆Hi的作用力矩,其中i=1,2,3,4.根据功率流图5(a),可得主差速器与分动器间的力矩传递关系式中:iA4-B1、iB4-B2、iB3-H4 为差速器间齿轮的传动比,其中 iA4-B1=iB4-B2= - 1,iB3-H4=2.根据主差速器与分动器转换机构的功率流向,得式中:为主差速器与分动器转化机构的传动比,且=-1;ηH为主差速器与分动器转化机构的传动效率.联立式(5)~(8)可得三轴差动机构输出力矩与输入力矩的关系从式(9)可以得出三轴差动机构的输出力矩近似相等,约为输入力矩的2/3.当ωH1≥ωH2>0.5ωA0>ωH3,假设3个输出轴的速比关系为ωH1∶ωH2∶ωH3=1∶λ1∶λ2,联立式(1)可得3个输出轴的转速从式(10)可以看出,三轴差动机构的效率与输出转速的速比、转换机构的传动效率和单对直齿轮的传动效率有关.因此三轴差动机构的效率为5 结论1)将键合图理论成功应用于复杂轮系的功率流分析,该理论可作为复杂轮系功率流分析的一种新的方法,比传统方法更具系统性,便于使用计算机进行求解.2)利用绝对速度法建立了三轴差动机构的键合图模型,并根据相应的转换规则对该模型进行了仿真求解.3)通过仿真可以得到三轴差动机构在不同速度约束下的内部功率流,以及主差速器和分动器转换机构的功率流情况,得出了三轴差动机构属于功率汇流型机构的结论.4)在求得三轴差动机构功率流的基础上,对该机构的力矩传递特性进行了分析,并对三轴差动机构进行了效率计算,为其推广和应用奠定了基础.参考文献:[1]唐德威,李庆凯,梁涛,等.三轴差动式管道机器人机械自适应驱动技术[J].机械工程学报,2008,44(9):128-133.[2]王述彦.行星轮系效率及自锁分析[J].机械科学与技术,2000,19(1):60 -63.[3]卢存光,段钦华.2K-H型行星轮系的功率流、效率与自锁[J].机械设计与研究,2007,23(4):39-40.[4]PAYNTER H M.Analysis and design of engineeringsystem[M].Cambridges:MIT Press,1961.[5]KARNOPP D C,MARGOLIS D L,ROSENBERG R C.System Dynamics:A Unified Approach[M].New York:Wiley,1990.[6]ROSENBERG R C.Reflections on engineering systems andbondgraphs[J].ASME,Journal of Dynamic Systems,Measurement,and Control,1993,115(2):242 -251.[7]JENNY M D,MARISOL D,CLAUDE B,et al.A survey of bondgraphs:theory,applications and programs[J].Journal of the Franklin Institute,1991,328:565-606.[8]BORUTZKY W,DAUPHIN-TANGUY G,THOMA J U.Advanced in bondgraph modelling:theory,software,applications[J].Mathematics and Computers in Simulation,1995,39:465-475.[9]THOMA J U.Simulation By Bondgraphs[M].New York:Springer,1990.[10]THOMA J U.Thermofluid systems by multi-bondgraphs[J].J Franklin Inst,1992,329:999 -1009.[11]王艾伦,钟掘.模态分析的一种新方法——键合图法[J].振动工程学报,2003,16(4):463-467.[12]王艾伦,刘云.复杂机电系统动力学相似分析的键合图法[J].机械工程学报,2010,46(1):74-78.。
基于键合图及Simulink的换管机回转液压系统动态仿真分析_王丹

收稿日期:2009-11-06;修订日期:2010-01-03基金项目:陕西省自然科学基金项目(2007E 218);陕西省教育厅自然科学专项(09J K559).作者简介:王丹(1984-),女,西安建筑科技大学硕士研究生。
基于键合图及S imu link 的换管机回转液压系统动态仿真分析王 丹1,原思聪1,王晓瑜1,李志远2(1 西安建筑科技大学机电工程学院,陕西 西安 710055;2 重庆宜康实业有限公司,重庆 401147)摘 要:采用功率键合图法,建立了地下管线液压换管机回转液压系统的数学模型;依据数学模型,运用动态仿真工具S i m u link 建立液压系统的仿真模型。
仿真结果反映了液压马达入口压力和输入流量随时间的变化情况,为分析系统的动态特性提供了依据。
关键词:功率键合图;液压系统;数学模型;S i m u li nk中图分类号:TH 137,T P391 9 文献标识码:A 文章编号:1001-196X (2010)01-0015-03Dyna m ic si m ulation analysis of the sle w ing hydraulic syste m ofpipeline replace m entm achines based on bond graph and Si m ulinkWANG D an 1,YUAN S -i cong 1,WANG X iao -yu 1,L I Zh-i yuan2(1 Schoo l o fM echanical and E lectr i ca l Eng i neer i ng ,X i an U ni v ers it y o f A rch itecture and T echnology ,X i an 710055,Ch i na ;2 Chongq i ng Y ikang Indutr ial Co .,L td .,Chongqi ng 401147,Ch i na)Ab stract :The m at hema ti ca l model of t he sle w i ng hydrau lic syste m of pipe line replacem ent machines tha t i s used to rep l ace underg round p i peli nes has been establi shed w ith the pow er bond graph me t hod ,and the si m u l a -ti on model of the hydrau lic syste m by usi ng the dyna m i c si m ulati on tool S i m u li nk has been bu ilt based on m athe -m ati ca lm ode ls .Si m ulati on results refl ec ted the change o f t he i nlet pressure and input flow o f t he hydrauli c mo -t o r w it h ti m e ,and prov ided a favorab l e basis f o r the analysis o f the dynam ic character istics o f the syste m.K ey words :po w er bond g raph ;hydraulic syste m;m a t he m atical mode;l s i m u li nk1 引言研究液压系统的动态特性需要考虑其非线性因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ENSAM Paris,…
Des conférentes d’initiation dans de nombreuses écoles d’ingénieurs
De nombreuses formations continues et séminaires pour ingénieurs
2
Introduction Principes et langage Applications Conclusion
Déplacement
q fdt
vitesse vitesse angulaire
courant
moment moment angulaire
flux magnétique
déplacement angle
charge
Hydraulique Chimique
Thermodynamique
pression
Moteur DC Arbre
Orifice
Pignon
Piston Crémaillère
Cylindre
bond graph àmots
u Moteur DC
i
1 1
Arbre
2 2
Pignon +
Crémail.
F V
Piston
P Cylindre
+
Penv
Q Orifice Q0
Électrique
Plan
• Introduction • Principes et langage bond graph • Exemples d’applications industrielles • Conclusion
1
Introduction Principes et langage Applications Conclusion
Principes de base de la modélisation bond graph
Représentation graphique des transferts de puissance Langage unifié pour tous les domaines physiques (analogie) Modèle BG d’un système :
pompe générateur de courant
Apport de puissance
Elément Symbole Loi générique Exemples
Comportement Energétique
Se Eléments
actifs Sf
Eléments Passifs
e indep de f f indep de e
gravité, générateur de tension
R.Rosenberg H. Paynter D. Karnopp D. Margolis
International Conference on Bond Graph Modelling Phoenix, Arizona, Janvier 2001
Enseignéde façon récurrente àECLille, INSA Lyon, INSA Toulouse, Sup Elec Rennes,
• 4 éléments de jonction (conservatifs de puissance) – 0, 1, TF, GY
6
Introduction Principes et langage Applications Conclusion
Eléments actifs et passifs
potentiel chimique température
débit volumique flux molaire
flux d’entropie
moment de pression
volume nombre de moles
entropie
5
Introduction Principes et langage Applications Conclusion
Introduction
• Père des bond graphs : Henry Paynter (MIT Boston) 1er ouvrage : 1961 («birthday »: 25 avril 1955)
• arrivée en Europe : fin des 70s – Pays-Bas (Twente Univ.) – France (Alsthom)
Variables généห้องสมุดไป่ตู้alisées
Variables de puissance
Variables d’énergie
Domaine
Mécanique Translation
Rotation
Electrique
Effort e
force couple
tension
Flux f
Moment
p edt
✓ entre le schéma physique et les modèles mathématiques ✓ visualisation de la causalité Hypothèse : paramètres localisés
3
Introduction Principes et langage Applications Conclusion
Eléments du langage bond graph
• 3 éléments passifs (reçoivent la puissance) – R : dissipation d’énergie – C , I : stockage d’énergie
• 2 éléments actifs (fournissent de la puissance) – Se , Sf : source d’effort , source de flux
Mécanique
Mécanique
Mécanique
Pneumatique
+Mécanique
rotation
rotation+
rotation+
rotation
Translation
Pneumatique
4
Introduction Principes et langage Applications Conclusion