高速磁浮列车分区运行控制系统的设计与实现
高速列车漂移控制系统设计研究

高速列车漂移控制系统设计研究一、引言高速列车已经成为现代快速交通的重要组成部分,其安全稳定性直接影响到人民群众的生命财产安全。
高速列车的漂移控制系统设计研究是现代交通领域的研究热点,本文将从控制系统的角度对高速列车的漂移控制系统进行设计研究。
二、高速列车漂移的原因高速列车漂移是由于列车行驶时受到的侧向风、弯曲道及环境等因素的作用,使得其出现偏离轨道的现象。
漂移严重的列车不仅会增加行车风险,还会导致更大的损失。
三、高速列车漂移控制系统的设计原理高速列车漂移控制系统的设计原理是基于列车的运动学和动力学特性而设计的。
该系统通过对车轮的转速、转向及悬架的调整,实现对列车漂移过程中的对轨制动、横向控制等多种模式的控制。
四、高速列车漂移控制系统的框架设计高速列车漂移控制系统的设计分为三层,分别是数据采集层、控制层和执行层。
1. 数据采集层数据采集层主要是通过安装在列车轮轴上的传感器采集车辆的转弯速度、横向加速度、采集车辆的位置数据,以及利用视频技术对车辆的运行状态进行实时监测和数据采集。
2. 控制层控制层主要是实现利用车辆运动学及环境预测模型,建立预测模型、轨迹规划和控制策略等多种控制策略,以便对列车多种漂移情况进行精确控制。
3. 执行层执行层主要是通过电子控制单元和电动悬挂控制器等相关设备,实现对车轮的转速、转向及悬架的调整,对车辆实时进行多模式控制。
五、高速列车漂移控制系统的实现方法高速列车漂移控制系统的实现方法主要以PID控制算法为基础。
其控制策略主要是基于列车漂移的历史数据,进行以往事件的预测分析,以实现对列车漂移多种情况的有效控制。
1. PID控制算法PID控制算法是实现高速列车漂移控制的重要手段之一,通过对输出信号进行加权和反馈控制,可以减轻车辆的漂移情况,提高车辆的稳定性及行驶安全性。
2. 模糊PID控制算法模糊PID控制算法是PID控制算法的一种改进算法,其思想是通过模糊控制原理对PID算法的增益和偏差进行模糊化处理,从而实现对车辆漂移情况的智能化控制。
上海磁浮示范运营线列车速度曲线监控功能分析
与传统 的பைடு நூலகம்道交通信号系统相 比, 磁浮列车运
行控制系统实现 了安全防护、 运行控制和运行监视 三大功能的高度集成 。它没有传统信号系统中区问 闭塞、 站内联锁、 机车信号等独立子系统 的区别 , 而
是把相关功能集成到了上述的 4 个部分中。 安全防护是指道 岔防护 、 进路 防护、 列车防护、
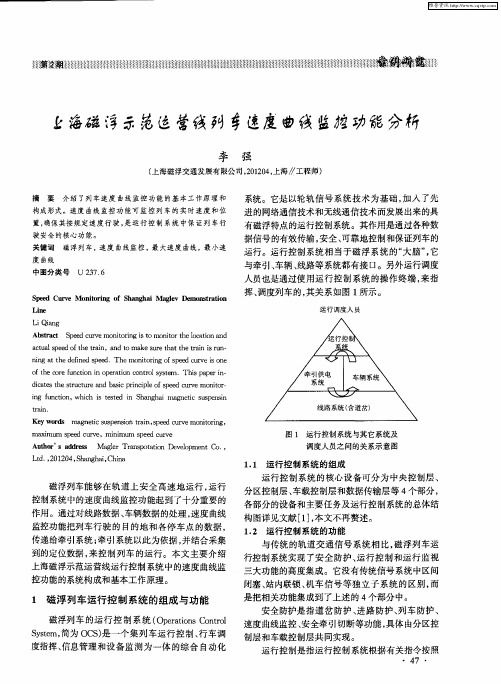
监控功能把列车行驶 的 目的地和各停 车点 的数据 , 传递给牵引系统 ; 牵引系统以此为依据 , 并结合采集 到的定位数据 , 来控制列车的运行 。本文主要介绍 上海磁浮示范运营线运行控制系统 中的速度曲线监 控功能的系统构成和基本工作原理 。
构图详见文献 []本文不再赘述 。 1,
s e d C r e M o i rn f S a g a a lv De n t a in p e u v n t i g o h n h i M ge mo s r t o o
Li ne
L Qa g i i n
Ab ta t S edcI emo i r gi t ntrtelc t na sr c p e u ̄ nti omo i h ai nd on s o o o
图 1 运行控 制系统与其它系统及 调度人 员之间的关系示意 图
Auh r S a d es M a lrTr so ain De e p n o. t o ’ d rs ge a p tt vl me tC , n o o L d ,01 0 S a g a, ia t . 2 2 4, h n h iChn
・
47 ・
维普资讯
璐; 聩盛 :涠 . : ; 患 交 鼹 { :
一
:
:
我国几种典型列车运行控制系统的比较与展望
我国几种典型列车运行控制系统的比较与展望摘要为了更好地研究国内轨道交通列车运行控制系统的技术发展趋势,从几种不同应用领域的轨道交通方式出发,对比分析其列控系统的结构和功能。
首先分析了几种典型列控系统的发展现状,不同的应用场景对列控系统的需求不一,也由此产生了不同风格的列控系统。
然后阐述了我国城市轨道交通、高速铁路和高速磁浮列控系统的技术路线,进而分析这三种列控系统的系统架构和功能特点,从列车的速度等级、牵引制动方式、车地传输方式、列车定位方式、速度防护方式等方面对列控系统进行对比分析。
研究结果表明,虽然城轨交通、高速铁路和高速磁浮的技术特征有较大差异,但三种列控系统的设计理念并无本质差异,在实际应用中可相互学习借鉴。
一、列车运行控制系统的发展现状轨道交通作为我国交通体系中的重要分支,在方便人们出行的同时极大地带动了经济的发展。
1.1 铁路列车运行控制系统的发展我国铁路列控系统的起步较晚,且存在信号制式不统一等特点。
自上世纪九十年代以后,传统列控系统得到迅速发展。
列车安全防护系统发展到超速防护阶段,列控铁路系统逐步向信息化和自动化方向迈进[1]。
2002年初,我国参考了欧洲ETCS 标准,制定了中国列车运行控制系统CTCS技术标准。
CTCS的提出改变了以车站联锁和自动闭塞为核心的传统铁路列车控制系统的理念和方法,是中国高速列车运行控制系统的里程碑[2]。
1.2 城市轨道交通列车运行控制系统的发展20 世纪90年代以前,我国城市轨道交通主要采用固定闭塞方式,一般按照出口速度控制方式防护列车运行安全。
20世纪90年代以后,我国逐渐开始发展准移动闭塞制式,形成目标-距离速度控制曲线。
21世纪以后,追踪间隔更小的移动闭塞系统被广泛应用,移动闭塞的制动终点为前方车辆的尾部,并留有一定的余量,大大缩小了最小行车间隔[3]。
1.3 高速磁浮列车运行控制系统的发展1935年,德国工程师赫尔曼·肯尔利用电子管放大器成功地在实验室完成了悬浮210kg重物的实验。
上海磁浮运控系统对列车状态的安全控制和管理
a d s ft r tc in o h r i . Th s p p r i to u e h n a ey p e t f t e tan o o i a e nrd cs t e o f rt c n iu a in a d ma a e e t o h s s se ih d r t g o n ng m n f t i y t m wh c ie l c y f n t n o h r i ’ t ts n d ds u s s h w O r aie t e u ci n t e tan S sau ,a i s e o t e l h o c z tan’ a e y c n r l d p o e t n t r u h t i s se . r i Ss f t to r t i h o g h s y t o n a c o m
Ke ywo d me lvt i ,o e a inc n r l y t ,s f t r — rs ge r n p rt o t se a o o s m aeyp o t t n,t i t t sc n r l c o e i a r n sa u t o o
OG 在 进行 列 车运 行 控制 和保 障 安全 运 行 时 , S 采用 了 自动 闭塞 的方 式 , 即在 列 车上 安 装 有 车载 控 制系统 ( 为 VC ) 简 S ;同时地 面上依 照 系统 设定 的原 则 将线 路分 为若 干 闭塞 分 区 , 分 区配 备 有 分 区控 各 制系 统 ( 简为 Dc ) s 。车载 和地 面分 区控 制 系统 中 的
Au h r s a d e s Op r t n D p rme f t o ’ d r s ea i e at nto o
《高速铁路概论》——08-高速铁路前沿技术

由于磁悬浮系统是以电磁力完成悬浮、导向和驱动功能的,断电后磁悬浮的安全保 障措施,尤其是列车停电后的制动问题仍然是要解决的问题。其高速稳定性和可靠性还 需很长时间的运行考验。 常导磁悬浮技术的悬浮高度较低,因此对线路的平整度、路 基下沉量及道岔结构方面的要求较超导技术更高。 超导磁悬浮技术由于悬浮能耗较常 导技术更大,冷却系统重,强磁场对人体与环境都有影响。
7.1 认识磁浮铁路
磁浮铁路是近几十年发展起来的 一种新型轨道交通运输工具,与传统 的轮轨铁路相比,它具有能耗低、速 度高、安全性高、噪声小、维修少等 优点,因而得到了广泛关注。
7.1.1 磁浮铁路的基本原理
磁浮铁路的核心是磁浮系统。磁浮系统是利 用异性相吸、同性相斥的电磁感应原理,以直线 电机驱动列车的。列车运行时,车体悬浮或吸浮 于导轨上方,并与导轨保持一定间隙。因磁浮列 车运行时不与导轨接触,没有轮轨摩擦,因此不 受黏着条件限制。
高架线路的横断面常采用的形式有U形、T形和倒T形。
ቤተ መጻሕፍቲ ባይዱ
(a)U形
(b)T形 磁悬浮铁路高架线路的横断面
(c)倒T形
7.1.2 磁浮铁路的基本设备
高铁论坛
请同学们观察上图,思考:磁浮铁路高 架线路常采用的横断面形式U形、T形和倒T 形有什么不同?
7.1.2 磁浮铁路的基本设备
1.磁浮铁路线路
2)磁浮铁路高架线路的构造
7.1.1 磁浮铁路的基本原理
(a)EMS型磁悬浮车示意简图 (b)EDS型磁悬浮车示意简图 EMS型和EDS型磁悬浮车对比图
1—前导磁铁;2—导向与制动轨;3—磁悬浮与推进电磁铁;4—前导轮; 5—磁悬浮磁铁;6—支撑轮;7—推进磁铁;8—超导磁铁
根据电磁吸引力和电磁排斥力的基本 原理,目前国际上磁浮列车有两个发展方 向:一个是以德国为代表的常导吸引型磁 浮系统(EMS型,也称电磁悬浮型),如 图(a)所示;另一个是以日本为代表的 超导排斥型磁浮系统(EDS型,也称电动 悬浮型),如图(b)所示。
基于CDMA1X的磁浮列车悬浮导向系统远程监控的设计与实现
Jn 2 t。0 7 a . 0h 2 0
◆研 究开 发 ・
基 于 C MA 1 的磁浮 列车悬浮导 向系统 D X 远 程监控 的设计 与实现
赵春 霞, 余龙华
( 国防科技大学 磁 悬浮技术研究 中心, 南 长沙 湖 40 7 ) 10 3
摘
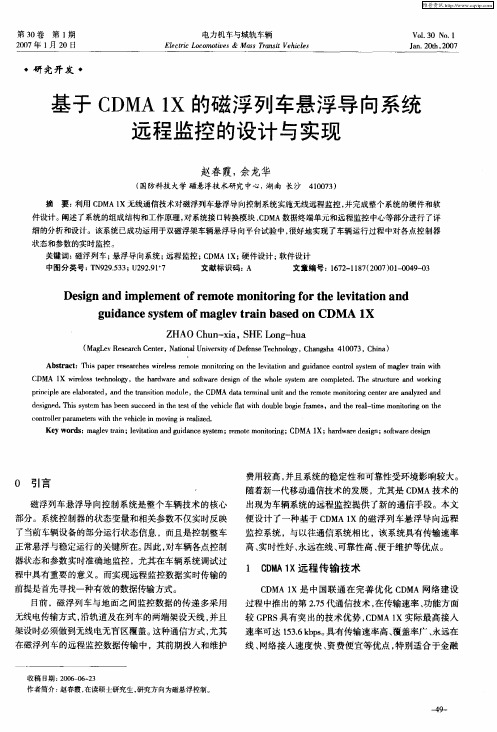
要: 利用 C M D A1 线通信技术对磁浮列车悬浮导 向控制 系统 实施无线 远程 监控 , 成整个系统 的硬件和软 X无 并完
0 引言
磁浮列车 悬浮导 向控 制系统是 整个 车辆 技术 的核心
费用较高 , 系统的稳定性 和可靠性受 环境影 响较 大。 并且
随着新一代移动通信技术 的发展 ,尤其是 C MA技术 的 D
出现为车辆 系统的远程监控 提供 了新 的通信手段 。本 文
便设计 了一种 基 于 C MA 1 D X的磁 浮列车悬 浮导 向远 程
d sg e . hssse h s e ns c e di h s ftev hcef t t o beb gef me ,a dtera—i ntr go h ein d T i ytm a e u c e tet t e il a h d u l o i r s n e l t b n e o h l wi a h memo i i nte on c nrl rp rmeesw t ev hcei vn e l e . o t l aa tr i t e il moigi rai d oe h h n s z Ke r s ywo d :ma lvtan;e i t na dg ia c y tm ; e t ntr g CDMA 1 ge i lvt i ud n esse rmoemo i i ; r ao n on X;h r w r e i ;sf aed sg ad aed sg n ot r ein w
高速磁浮列车分区运行控制系统可靠性提高方法研究
20 11年 1 1月
铁
道
学
报
Vo. 3 No 1 13 .1
No mb 2 1 ve er O1
J OURNAL OF THE CHI NA RAI W AY OCI L S ETY
文章 编 号 : 0 18 6 ( 0 1 l - 0 8 0 1 0 — 3 0 2 1 ) 10 5 —5
me h d wa r v d Atl s ,t e m e h d wa p l d i h e e t a ie p r t n c n r l y t m ,a d t e r — t o sp o e . a t h t o sa p i n t e d c n r l d o e a i o to s e e z o s n h e l b l y o h i h s e d ma lv t a n o e a i n c n r l y t m si r v d e f in l ,wh c s f l o n 一 i i t ft eh g — p e g e r i p r t o t o s e wa mp o e fi e ty a i o s c ih i u eu 3 s t
r a ie h u c in o p r to o ma d a d s f t r t c i n f r h g — p e a l v t a n . On t e b ss o e l s t e f n t fo e a i n c m z o n n a ey p o e t o i h s e d m ge r is o h a i f t e e p re c fd v l p n h x e i n e o e e o i g,d b g i g a d r n i g t e e g n e i g p o o y e o h e e t a ie p r to e u g n n u n n h n i e rn r t t p f t e d c n r l d o e a i n z
磁浮列车无线通信系统中空间分集合并模块的设计与实现
第4 卷 第 6 7 期 20 0 7年 1 2月
奶 讥 技
1ee 0 ' c mmu ia jn En i e rn l nc t gn e g 0 i
Vo . No 6 147 . De . 0 7 c2 0
文章 编 号 :0 1 8 3 2 0 )6— 14— 4 10 — 9 X(0 7 0 0 3 0
Ab ta t C mmu iain c a n lc a a trsis a d r c ii g d v r i o i a o c e o e d — sr c : o n c t h n e h r ce t n e e vn ie t c mb n t n s h me fr t o o i c s y i h me t ge e il i ls o s c ma lv v hc e w r e s c mmu i ain s se a e a a y e .T e dv r i d l e in s h me i e n c t y t m n lz d o r h ie t mo u e d sg c e sy
e au t n vlao i
现场试 验结果 进 行 了分析 。
1 引 言
高速磁悬浮列车控制指挥系统需要实时与列车 交换重要的伺服及定位信息 , 任何超过 1 s 5m 的传 输 中断都会破坏列车的伺服稳定并带来安全隐患, 因此车地无线通信系统必须在干扰及衰落信道环境 中实现可靠的实时数据传输。 目前 , 为了解决信道 衰落问题 , 除了信道编码外 , 已有多种抗衰落技术。
・
1 34 ・
维普资讯
以分集最为有效 。本文简要分析了车地通信系统的 信道环境 , 给出了磁浮列车车地无线通信系统 中多 天线分集方案及分集合并模块的设计与实现 , 并对
HST的工作原理
HST的工作原理HST(高速列车)是一种新型的高速铁路交通工具,它采用磁浮技术和线性电机驱动系统,具有较高的运行速度和运行效率。
下面将详细介绍HST的工作原理。
1. 磁浮技术:HST采用磁悬浮技术,通过磁力使列车浮起,减少与轨道的接触摩擦,从而降低能量损耗和噪音。
磁浮系统由列车底部的磁体和轨道上的电磁线圈组成。
当电流通过轨道上的电磁线圈时,会产生磁场,与列车底部的磁体相互作用,使列车悬浮在轨道上。
2. 线性电机驱动系统:HST采用线性电机驱动系统,通过电磁力驱动列车前进。
线性电机由列车底部的电磁线圈和轨道上的磁体组成。
当电流通过列车底部的电磁线圈时,会产生磁场,与轨道上的磁体相互作用,产生电磁力推动列车行驶。
3. 控制系统:HST的控制系统起着关键作用,确保列车的安全和平稳运行。
控制系统由多个传感器、计算机和控制器组成。
传感器用于监测列车的位置、速度、加速度等参数,将数据传输给计算机。
计算机根据传感器的数据,通过控制器调整电流和磁场的强度,实现列车的悬浮和驱动。
4. 能源供应:HST的能源供应主要依靠电力系统。
轨道上安装有供电线路,列车通过接触轨道上的供电线路获取电能。
电能经过整流和变频等装置转换成适合列车使用的电流和频率,供给磁浮系统和线性电机驱动系统。
5. 安全系统:HST的安全系统包括列车控制、通信和监测系统。
列车控制系统通过控制列车的速度、加速度和制动等参数,确保列车在安全范围内运行。
通信系统用于列车与控制中心、信号系统和其他列车之间的信息交流。
监测系统用于实时监测列车的状态和轨道的安全性,及时发现和处理问题。
总结:HST的工作原理是通过磁浮技术和线性电机驱动系统实现列车的悬浮和驱动。
磁浮技术减少了与轨道的接触摩擦,提高了运行效率;线性电机驱动系统通过电磁力推动列车前进,实现高速运行。
控制系统、能源供应和安全系统保证了列车的安全和平稳运行。
HST作为一种新型的高速铁路交通工具,具有重要的意义,将为人们的出行提供更加快速、舒适和可靠的选择。
中国高速磁悬浮列车的工作原理
中国高速磁悬浮列车的工作原理08型车辆。
1987年,建成埃姆斯兰试验线31.5公里,最高运行速度达450公里/小时,运行里程累计已超过60万公里。
上海磁浮列车示范线采用的是德国技术,列车运行时,与轨道完全不接触。
它没有轮子和传动机构,列车的悬浮、导从驱动和制动都是利用电磁力来实现的。
悬浮电磁铁将车辆往上吸住线路;导向电磁铁保证列车沿线路两侧的定位。
电磁控制系统保证磁浮列车与轨道间约10mm的间隙、列车通过长定子同步直线电机来驱动和制动,直线电机的原理可以从旋转电机引申出来,即将旋转电机定子剖开再展直,安装在线路两侧的下面、直线电机定子线圈中的电流产生一个运动磁场。
在这个运动磁场的作用下,磁浮列车往前运运行。
在实际运营中,转弯、路障成了关乎安全的重大问题。
整条上海磁浮线路需要转弯的地方有三处,其中设计的最大转弯曲线半径达到8000米,用肉眼看几乎是一条直线,因此在转弯中乘客没有丝毫的不适,最小半径也达到1300米,即使是高速行驶中的转弯,乘客也同样感觉平稳舒适。
在磁浮轨道全线两边50米范围内,还装有目前国际上最先进的隔离装置,人为在轨道上制造障碍几无可能。
同时,为了防止磁悬浮列车高速运行时对行驶在高架道路上的机动车产生影响,将在高架道路的内侧栏杆处安装防眩板。
由于磁浮列车在行驶中是处于不接触轨道的悬浮状态,列车在起动和停止行驶的一刹那,乘客会感觉到车身有些许提升与下降。
不过,乘客大可不必为此担心,因为精心制造的磁浮线路轨道梁确保了列车下落时的安全“软着陆”。
轨道梁既是承载列车的承重结构,又是浮起列车运行的导向结构,制造精度极高,梁体的最终测试与调整均是在恒温车间进行的,正因此,它能确保列车在浮、落状态下乘客的安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高技术通讯2007年9月第l7卷第9期 高速磁浮列车分区运行控制系统的设计与实现① 徐洪泽②郑伟 刘湘黔岳强仲维锋 (北京交通大学交通与工业控制系统研究所北京100044)
摘要 分析了高速磁浮列车分区运行控制系统的功能及安全需求,提出了一种分区运 行控制系统功能分解方案并确定了各子系统的接Iz/关系,基于自主研制的3取2安全计 算机研制了高速磁浮列车分区运行控制系统工程样机。该工程样机系统由分区控制及安 全防护计算机子系统,牵引供电安全控制子系统,分区道岔安全控制子系统组成。集成调 试结果表明,该样机有效实现了高速磁浮列车的运行指挥及安全防护功能。 关键词 高速磁浮列车,运行指挥安全防护,运行控制系统,分区,工程样机
0 引言 高速磁浮列车系统由车辆系统、线路系统、列车 牵引及供电系统以及运行控制系统等四部分组成。 运行控制系统把其他三个系统连接起来 J,实现对 高速磁浮列车系统的运行指挥控制及安全防护功 能。运行控制系统是保证磁浮列车高效、安全运行 必不可少的系统,其安全性能直接影响到磁浮列车 系统的安全性及可用性。尽管德国在上海建成了时 速430公里的高速磁浮列车示范运营线,但是高速 磁浮列车运行控制系统技术的研究工作还比较滞 后,仍处在初级实用阶段【1,2-4],2006年德国高速磁 浮列车实验线撞车事故充分说明了这一点。本文在 研究了德国高速磁浮列车运行控制系统体系结构、 功能与安全需求的基础上,提出了一种高速磁浮列 车分区运行控制系统功能分解方案,基于自主研制 的3取2安全计算机,研制了分区运行控制系统的 工程样机,并参与了集成调试,取得了满意的试验效 果,为我国高速磁浮列车核心技术国产化奠定了坚 实基础。 1 分区运行控制系统的需求分析 系统需求分析分两个方面:一是系统的功能需 求分析,二是系统的可靠性及安全性需求分析。 1.1分区运行控制系统的功能需求分析 德国高速磁浮列车运行控制系统采用了三层结 构:位于控制中心的中央运行控制系统,位于牵引变 电站和轨道旁的分区运行控制系统,位于列车上的 车载运行控制系统。这三个系统之间分别通过运行 控制核心网、联锁总线及38GHz车地无线通信网络 实现数据传输…1。 分区运行控制系统是高速磁浮列车系统的核心 中枢,完成列车驾驶控制、列车控制与防护、列车位 置监控、进路及道岔控制与防护、列车速度监控和牵 引供电安全切断等功能,具体内容如下: (1)接受中央运行控制系统的各项操作指令,并 实时反馈给中央运行控制系统有关列车、线路、道岔 等系统的各类状态信息,配合中央运行控制系统实 现操作及表示功能。 (2)与车载运行控制系统配合实现列车的悬浮 降落控制、车门控制及定位测速等功能,同时实现列 车的安全防护功能。 (3)指挥牵引控制系统转换工作状态,使其按照 允许的速度范围向指定的目标车站牵引列车,同时, 实现防护功能。 (4)实时监控道岔的状态,根据需要指挥道岔系 统转换道岔的位置,同时实现道岔的安全防护功能。 (5)实时监控道岔、线路的状态及列车的位置信 息,实现进路的控制与安全防护功能。 (6)实时监督列车的运行速度,当列车的速度超 出规定范围,控制牵引供电系统切断牵引系统的供 电电源,并与车载运行控制系统配合确保列车不超 过规定的速度,在规定的停车点安全停车。 (7)实时监控运行控制系统自身的状态,一旦发
①863计划(20o4 540)资助项目。 ②男,1.9.66譬生,博士,教授;研究方向:轨道交通运行控制;联系人,E-mail:hzxu@bjtu.edu.ca (收稿日期:20o7-03-05)
958·--—— 徐洪泽等:高速磁浮列车分区运行控制系统的设计与实现 现危及行车安全的状况,单独或与车载系统配合控 制列车在规定的停车点安全停车。 (8)与相邻的分区运行控制系统配合,实现列车 的分区交接及安全防护功能。 1.2分区运行控制系统的可靠性安全性需求分析 运行控制系统是保障列车及乘客安全的最后防 线。前面给出了分区运行控制系统应实现的功能, 对于轨道交通运行控制系统来说,这些功能是远远 不够的,根据轨道交通运行控制系统的技术规范要 求,分区运行控制系统还应具有如下特性-5 J: (1)高可靠性。一方面,系统软硬件出现故障的 概率要极小,另一方面,即使系统中的某些部件或软 件模块发生故障,系统功能受到影响的概率要极小, 应满足轨道交通系统的技术规范指标要求。 (2)功能安全性。即在系统的硬件没有发生任 何故障,系统的软件及数据没有受到外界干扰的情 况下,系统功能应正常且不会产生危及行车安全的 结果。 (3)故障.安全l生。即不论系统硬件发生任何故 障,系统软件及数据受到任何干扰,以及故障后系统 是否能正常工作,磁浮列车系统发生危险的概率要 极小,应满足轨道交通系统的技术规范指标要求。 2 分区运行控制系统设计 2.1德国高速磁浮列车分区运行控制系统分析 如图1所示,德国高速磁浮列车分区运行控制 系统主要由分区控制计算机、分区安全计算机、分区 牵引切断、分区道岔模块等子系统组成。其中,分区 控制计算机子系统为双机热备份的非安全计算机系 统,其他子系统都是以西门子公司研制的以3取2 安全计算机为基本构件的系统,安全计算机系统之 间由西门子公司研制的联锁总线连接。 在系统功能及安全需求分析的基础上,并借鉴 以往轮轨交通信号系统的经验,不难看出,德国的分 区运行控制系统存在许多需要改进的地方: (1)基于非安全计算机构建的分区控制计算机。 由系统功能及安全需求分析可知,分区运行控制系 统与安全密切相关,德国的分区控制计算机是分区 安全计算机的输出机构,如果分区控制计算机运算 错误并导致错误输出,会导致牵引系统误动作。分 区安全计算机不能约束分区控制计算机输出错误动 作,只能事后防护,因此,分区运行控制系统所有子 系统和子模块都应由安全计算机构成,以提高系统 的安全性。 (2)德国的分区运行控制系统中,分区内的安全 计算机子系统间的安全信息交换及分区间的众多分 区安全计算机的安全信息交换,都借助同一个安全 信息传输网(联锁总线),这样分区内及分区间大量 不相关的信息在同一个网上传输,既没有必要,也增 加了网络系统的负担,更影响信息传输的可靠性及 安全性。
图1德国分区运行控制系统及其接口框图 2.2分区运行控制系统功能分解方案 根据分区运行控制系统功能需求,并借鉴德国 系统的经验,本文研制的分区运行控制系统的结构 如图2所示。系统由分区控制及安全防护计算机、 牵引供电安全控制系统、分区道岔安全控制系统组 成。 分区控制及安全防护计算机系统为分区运行控 制系统的核心,实现全部磁浮列车系统的运行指挥 控制及安全管理与防护功能。 道岔安全控制系统和牵引供电安全控制系统是 分区控制及安全防护计算机系统的安全执行机构。 其中:道岔安全控制系统实时监控道岔的状态,根据 需要指挥道岔系统转换道岔的位置,同时协助分区 控制及安全防护计算机实现道岔的安全防护;牵引 供电安全控制系统配合分区控制及安全防护计算机 系统实现牵引系统的供电电源控制。
959·--—— 高技术通讯20ff7年9月第17卷第9期 广…一’一’一…一’一’一。I i中央运行控制系统i
II II II II II Il I 一 1.一…一…一‘’…一…一…一’一
i 有线通信罔及其管理系统
:分区运行1分区控制及安l : 去相邻分区 控制系统I全防护计算机广_1
I圜Ii 岔系统i j全控制系统l l I全控制系统 =.二.二二.二._二.L=.-二 二 二 二:二:二: I一…一…一… …一…一…一’I
牵引控 制系统
牵引供 电系统
图2新型分区运行控制系统及其接口框图 2.3分区运行控制系统的接口关系分析与设计 如图2所示,分区运行控制系统是高速磁浮列 车的中枢,其对内、对外的联系紧密,接口关系复杂。 2.3.1分区运行控制系统设备间的接口分析与设 计 (I)分区内运行控制系统设备间的接口 如图2所示,分区内部的分区安全及控制计算 机系统与其安全执行机构道岔安全控制系统和牵引 供电安全控制系统通过分区内部的安全信息总线相 连,实现分区内各种控制命令及状态信息传输。 (2)分区间的接口 采用独立于分区内部的安全信息总线,实现多 分区间的分区控制及安全防护计算机间列车及进路 等安全信息的分区交接。 2.3.2分区运行控制系统对外接口的分析与设计 分区运行控制系统有两类对外接口,一是与运 行控制系统内部的中央及车载运行控制系统的接 口,二是与牵引控制、牵引供电及道岔系统的接口。 (1)与中央运行控制系统的接口 分区控制及安全防护计算机通过以太网与中央 运行控制系统连接,接收中央运行控制系统的操作 命令,并实时反馈各种状态信息给中央运行控制系 统。 (2)与车载运行控制系统的接口 分区控制及安全防护计算机通过标准RS232接 口与车地无线通信网相连,实现与车载运行控制系 统间控制命令及状态信息等的传输。 960一
(3)与牵引控制系统的接口 分区控制及安全防护计算机通过以太网与牵引 控制系统相连,传输牵引控制命令及牵引数据等,并 接收牵引系统的反馈信息。 (4)与牵引供电系统的接口 牵引供电安全控制系统通过开关量输入输出接 口与牵引供电系统相连,实现监测及控制牵引系统 的供电状态。 (5)与道岔系统的接口 道岔安全控制系统通过开关量输入输出接口及 标准RS422接口与道岔系统相连,实现对道岔系统 的监测、控制及防护。 2.4系统的可靠性及安全性设计 根据轨道交通运行控制系统技术要求,分区运 行控制系统工程样机必须满足高可靠、功能安全及 故障一安全的设计要求,因此,本文研制的分区运行 控制系统的各子系统的工程样机都以3取2安全计 算机为基本构件,且各子系统的通信信道及开关量 输入输出通道、各子系统的每个部件、环节及模块都 按照“故障一安全”技术原则设计_5_5。 分区运行控制系统的各子系统工程样机软件的 每个部件、环节及模块以及软件研制过程都符合“故 障一安全”设计原则。 为提高系统的可靠性,各子系统的通信信道及 开关量输入输出通道,都采用两倍以上冗余设计。
3 分区运行控制系统工程样机研制 参照轮轨交通信号系统的技术标准,充分考虑 高速磁浮列车系统的技术特点,并根据分区运行控 制系统的设计方案,分别研制分区控制及安全防护 计算机系统、道岔安全控制系统及牵引供电安全控 制系统工程样机的软硬件。 3.1工程样机硬件系统研制 由系统设计方案可知,本文研制的分区运行控 制系统的3个子系统都以自主研制的JT31型3取2 安全计算机为基本构件,且每个通道以及每个部件、 环节和模块都按照“故障一安全”技术原则设计。 为提高系统的可靠性,各子系统的通信信道及 开关量输入输出通道,都采用两倍以上冗余设计。 另外,JT31型3取2安全计算机采用主频 400MHz的低功耗嵌入式的CPU,系统更简洁,功能 更强,可靠性更高。可以运行DOS、Linux及Vxworks 等操作系统。