增速器设计
气动增速器工作原理

气动增速器工作原理今天咱们来唠唠气动增速器这个超有趣的小玩意儿的工作原理。
你可以把气动增速器想象成一个超级打气筒,不过它可不光是打气那么简单哦。
气动增速器呢,它主要是利用压缩空气来工作的。
压缩空气就像是一群被关在小笼子里的小怪兽,一个个都憋着劲儿呢。
当压缩空气进入到气动增速器里面的时候,就像是打开了小怪兽的笼子,它们开始撒欢儿啦。
这里面有一个很巧妙的结构,就像给小怪兽们准备了一条特别的跑道。
这个跑道可不是平平无奇的,它有着特殊的形状和设计。
压缩空气在这个跑道里跑的时候,就会被加速。
你看啊,空气本来是慢悠悠地进来,就像散步的小老头,但是经过这个特殊的跑道,一下子就变成了风驰电掣的赛车,速度蹭蹭往上涨。
气动增速器里面还有一些小部件,就像是赛道上的引导员。
它们会巧妙地引导着空气的流动方向,让空气按照最有利于加速的路线奔跑。
比如说,有的部件会把空气聚集起来,就像把分散的小怪兽们集合到一起,这样它们的力量就更大了,跑起来也就更快了。
而且呀,气动增速器的外壳也很重要呢。
它就像是一个保护罩,同时也像是一个声音的控制盒。
你想啊,如果小怪兽们撒欢儿跑的时候没有个约束,那声音得多大呀。
这个外壳就可以在一定程度上减少噪音,让气动增速器工作的时候不会像一群乱哄哄的小怪兽在吵闹,而是比较安静地在那里高效工作。
再说说它的输出端。
经过加速的空气在输出端就像是被训练好的超级战士,有着强大的能量。
这个能量可以用来驱动各种工具或者设备。
比如说,要是连接到一个小的气动工具上,就可以让这个工具像打了鸡血一样,工作得又快又好。
就像给一个小机器人注入了超强的动力,让它一下子变得超级能干。
气动增速器就像是一个充满魔法的小盒子,把普普通通的压缩空气变成了高速的能量源。
它的工作原理虽然听起来有点复杂,但是只要你想象成一群小怪兽在特殊的赛道上奔跑,是不是就觉得很有趣啦?它在很多工业场景里可是大功臣呢。
比如说在一些需要快速而精准操作的流水线上,气动增速器提供的高速动力可以让工具快速地完成任务,就像一个快手小工匠,不拖泥带水。
齿轮加速器原理

齿轮加速器原理
齿轮加速器(也称为增速器)的原理基于齿轮传动的基本定律,即两个相啮合齿轮的角速度与它们的齿数成反比。
简单来说:
1. 当一个小齿轮(具有较少齿数)与一个大齿轮(具有较多齿数)啮合时,小齿轮每转一圈,由于大齿轮的齿数更多,它转动的角度就相对较小,因此大齿轮转动的速度较慢,但提供的扭矩较大。
2. 相反,若一个大齿轮带动一个小齿轮,则小齿轮会以更快的速度旋转。
这是因为同样时间内,大齿轮传递过来的运动会使小齿轮上的每一个齿经过更多的行程,导致小齿轮转得更快,但是产生的扭矩相对较小。
所以,齿轮加速器就是利用这一原理,在动力系统中通过一组适当的齿轮组设计,使输入轴上的低速高扭矩运动经过加速齿轮组之后,在输出轴上得到较高的速度和较低的扭矩。
例如,在工业应用中,电机或其他动力源的低速转动可以通过加速齿轮箱转换为高速转动,常用于需要高速旋转但不需太大扭矩的场合,如某些机器设备或风力发电机的转子部分。
750kW双向双速齿轮增速箱设计
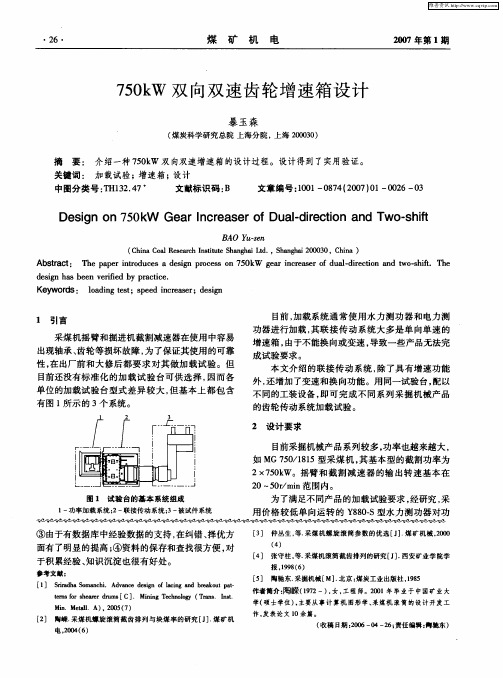
图 1 试验台的基本 系统组成
1 功率加载系统 ; 一 一 2 联接传动 系统 ; 一 3 被试件 系统
目前采掘机械产 品系列较多 , 功率也越来越大 , 如 M 5/85型采煤机 , G7 0 11 其基本型的截割功率为 2X 5 k 0 W。摇臂 和 截 割 减 速 器 的输 出转 速基 本 在 7 2 5 rmn范 围内 。 0~ 0/ i 为 了满 足不 同产 品的加 载试验 要求 , 经研 究 , 采 用价格较低单向运转 的 Y 8 . 80S型水力测功器对功
报 ,98 6 19 ( )
[ ] S r h m nh.A vned s n o l i d b aotpt 1 ra aS a ci d ac ei f a n a r k u a id o g c gn e - t n f er rm [ ] i n eho g Ta e s o s a rd s C .M n g Tcn l y( r r rh e u i o m.I t n . s
关键 词 : 加 载试 验 ;增速 箱 ; 计 设 中图分类 号 :H124 T 3 .7
De in o 5 k a n r a e fDu l i c i n a d T sg n 7 0 W Ge rI c e s ro a— r t n wo s i de o - hf t
[ ] 仲丛生 , 采煤机螺旋 滚筒 参数的优选 [ ] 煤 矿机械 , 0 3 等. J. 2 0 0
( 4)Biblioteka ③ 由于有数据库中经验数据的支持 , 在纠错 、 择优方 面有了明显的提高; ④资料的保存和查找很方便 , 对 于积累经验 、 知识沉淀也很有好处。
参考文献:
[ ] 张守柱 , 采煤机滚筒 截齿排列 的研究 [ ] 西安矿业学 院学 4 等. J.
增速传动方案

增速传动方案引言在机械传动中,增速传动方案是一种常用的方法,用于将输入轴的转速提升到输出轴所需的转速。
增速传动方案可以通过不同的机构来实现,例如齿轮传动、带传动和链传动等。
本文将介绍增速传动方案的基本原理、常用机构及其特点。
基本原理增速传动方案的基本原理是利用机械装置将输入轴的转速增加到输出轴所需的转速。
根据转动关系的不同,增速传动方案可以分为等速传动和变速传动。
等速传动等速传动是指输入轴和输出轴的转速保持不变,只是通过传动装置将转动力传递到输出轴。
常见的等速传动装置有齿轮传动、同步带传动和链传动等。
齿轮传动齿轮传动是一种常用的等速传动装置,通过齿轮的啮合来实现输入轴和输出轴之间的动力传递。
齿轮传动可以实现不同的增速比,通过使用不同大小的齿轮组合。
齿轮传动具有结构简单、转动平稳、转动效率高等特点,常用于需要较大转矩和可靠性的应用。
同步带传动同步带传动是一种通过齿形同步带将转动力传递到输出轴的传动装置。
同步带传动由齿形同步带、同步带轮和张紧装置组成。
同步带传动具有结构简单、传动效率高、运行平稳等特点,常用于需要较小转矩和较高速度的应用。
链传动链传动是一种利用链条将转动力传递到输出轴的传动装置。
链传动由链条、链轮和张紧装置组成。
链传动具有结构简单、承载能力大、容错能力强等特点,常用于需要较大转矩和可靠性的应用。
变速传动变速传动是指通过传动装置改变输入轴和输出轴之间的转速关系。
常见的变速传动装置有无级变速装置和变速齿轮箱等。
无级变速装置无级变速装置是一种能够连续调节输出轴转速的传动装置。
无级变速装置通过改变输入轴和输出轴之间的传动比来实现转速调节。
无级变速装置具有调节范围广、运行平稳等特点,常用于需要连续变速的应用。
变速齿轮箱变速齿轮箱是一种通过不同组合的齿轮来实现转速调节的传动装置。
变速齿轮箱可以通过切换不同的齿轮组合来改变输入轴和输出轴之间的传动比。
变速齿轮箱具有转速调节范围广、承载能力大等特点,常用于需要多档调速的应用。
加油车增速器优化设计方法

加油车增速器优化设计方法
王修强
【期刊名称】《专用汽车》
【年(卷),期】1992(000)003
【总页数】3页(P43-44,64)
【作者】王修强
【作者单位】无
【正文语种】中文
【中图分类】U469.61
【相关文献】
1.一种控制器与滤波器的协调优化设计方法 [J], 王启志;王晓霞;王永初
2.观测器与控制器的协调次优化设计方法 [J], 王永初;王启志
3.航空器加油车地井栓应急拉绳过热原因分析及改善措施 [J], 徐雅涵;李富龙
4.航空器加油车地井栓应急拉绳过热原因分析及改善措施 [J], 徐雅涵;李富龙
5.风速增速器以及带有风速增速器的风力机 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
硬件加速器的设计与实现

硬件加速器的设计与实现随着现代科技的发展,大量的数据处理和计算任务需要在极短的时间内完成,传统的通用计算机往往无法满足要求。
为了提高计算速度和效率,硬件加速器逐渐成为解决方案。
一些应用领域,如人工智能、物联网、图像处理等,都需要硬件加速器来提高数据处理和计算能力。
本文将介绍硬件加速器的概念、优势和设计实现。
一、硬件加速器概念硬件加速器是一种能大幅度提升数据处理和计算速度的特殊硬件。
它能够承担一部分特定的任务,如信号处理、加密和解密、图像处理、机器学习、人工智能等,以及一些科学计算和模拟。
相比传统的通用计算机,硬件加速器能够显著提高执行效率,减少系统响应时间,降低处理负载。
硬件加速器的设计旨在充分利用硬件并行性,以高效完成特定的计算任务。
二、硬件加速器的优势1. 高性能和高效性能硬件加速器能够充分利用硬件资源,以高效方式执行特定的计算任务。
相比CPU,GPU和FPGA,硬件加速器拥有更高的并行性和更快的计算速度。
因此,硬件加速器能够在短时间内处理大量数据,提供更高的计算性能。
2. 可编程性和灵活性硬件加速器具有良好的可编程性和灵活性。
根据应用需求和计算任务,硬件加速器的功能和适应性都可以进行定制化。
同时,硬件加速器还可以根据最新的技术进展进行更新和升级。
3. 节约成本硬件加速器也能够在一定程度上节约成本。
相比于传统的通用计算机,硬件加速器能够更好地完成特定的计算任务,同时还能提供更高的性能。
这样可以大大节约成本,提高计算效率。
三、硬件加速器的设计实现硬件加速器是由硬件和软件两个部分组成的。
硬件包括处理器、存储器、中断控制器、I/O控制器、时钟、信号发生器等。
软件包括硬件描述语言、编译器、操作系统、应用程序等。
硬件加速器的设计实现基于三个关键设计参数:性能、功耗和面积。
性能代表着硬件加速器能够执行的计算任务和数据处理能力。
功耗代表着硬件加速器需要的能量和能源消耗。
面积代表着硬件加速器的物理尺寸和芯片面积。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章兆瓦级风力发电系统增速器设计 传动装置是大多数机器的主要组成部分。传动件及传动装置设计是否合理、制造和装配质量是否符合要求,将成为决定产品质量的关键。传动可以分为机械传动、流体传动和电传动三类。而机械传动按其工作原理分为啮合传动与摩擦传动,具体分为链传动、带传动、齿轮传动、蜗杆传动四类。根据风力发电机组传动特点和工作环境要求,一般均选择齿轮传动。 齿轮传动是机械传动中最重要、应用最广泛的一种传动形式。其主要优点是:具有瞬时传动比恒定、可靠性高、寿命长、结构紧凑。齿轮传动分为开式、半开式和闭式三种传动方式。由于风力发电机工作环境恶劣,一般采用闭式传动以满足润滑要求。 增速器是指安装在原动机与工作机之间独立的闭式传动装置,用于增加转速应相应减小转矩。增速器是风力发电机组的重要组成部分,它承担了调速、改变运动形式、动力和运动的传递和分配等功能。考虑到风力发电机要求传动比大、结构紧凑、效率高等特点,本文采用两级行星齿轮传动加一级平行轴斜齿轮传动的结构形式。
2.1传动方案的确定 目前,国内外生产的风力发电机齿轮箱可分为平行轴圆柱齿轮箱、行星齿轮箱以及平行轴与行星轮系混合式齿轮箱几类;按照传动的级数分为单级和多级齿轮箱;按照传动的布置形式可以分为展开式、分流式和同轴式以及混合式。 现在市场上功率为10KW的增速箱一般采用采用NGW型行星传动,由行星架输入,太阳轮输出,主要特点是:(1)行星架和太阳轮的浮动设计,结构简单,较好的实现了均载; (2)采用行星架作为输入轴,符合风力发电机受力大、转矩大的特点。缺点是:功率太小,经济效益差,资源利用率低。 500KW以上的风电增速箱由于功率大,大转矩的特点,通常采用功率分流的行星传动。常见结构有:两级平行轴加一级行星和一级平行轴加两级级行星传动两种形式。本文采用的是平行轴与行星轮系混合式齿轮箱。
传动方式简图 2.1.1增速器基本设计要求及设计步骤 增速器齿轮箱的主要设计要求如表2.1所示。 表2.1原始设计要求 额定功率 1500KW 增速比 52~72 输出转速 1400~1600 r/min 输入转速 24~35r/min 分度圆压力角 20° 模数 15~25 最大齿轮直径 1450mm
增速器设计步骤: (1)根据传动装置的使用要求及工作特点确定传动形式为行星齿轮传动。 (2)确定行星传动的结构形式和选择传动方案。 (3)根据选定的电机的输入速度和经过减速机构减速后的输出速度,确定出这个减速机构的传动比范围。 输入速度:24.78rpm 增速机构增速后的输出速度: 1544.1 rpm i=1544.1/24.78=62.3127 根据减速装置的用途和工作特点,行星传动的结构形式确定为:单级2K-H(NGW型)行
星传动机构。确保其稳定性,行星轮数目为3,其传动比范围为: BaHi=2.1~13.7。由此,初分配行星传动机构中行星轮级数。 根据工作条件需要,行星轮与转动电机之间需要留出足够的位置便于安放电机,并使机构结构紧凑,安装方便,电机与行星轮之间采用斜齿圆柱齿轮连接。行星轮机构初定为2级,每级传动比分配情况如下:
第一级: BaHi=5.2
第二级: BaHi=5.7 2.1.2传动方案及运动原理图 目前,国内生产的增速箱主要采用2K-H ( KGW)型行星传动,行星架为输入端,太阳轮为输入端。其具有如下优点: (1)行星架采用焊接结构,工艺简单,重量较轻。 (2)动力由行星轮系系杆输入,刚性好,符合风力发电机受力大、转矩大的特点。 (3)高速级和低速级分别采用行星架浮动和太阳轮浮动,简化了结构,使得结构更加的紧凑,均载效果好。 缺点:功率太小,不适合大型风力发电场;蓄能装置负担较大。 考虑到兆瓦级风力发电机大功率,结构紧凑、高可靠性等特点,结合中国船级社风力发电机组规范,本文采用的传动形式如图2.2. 增速器传动结构分为三级,前两级为行星轮系,第一级行星架为输入端,由第一级太阳轮传递至第二级行星架,由第二级太阳轮输出;第三级采用斜齿轮平行轴轮系传动,直接与电机相联。此传动方案具有如下优点: (1)低速级为行星传动,效率高,体积小,重量轻,结构简单,传递功率范围大,成功实现了功率分流,轴向尺寸小,采用行星轮浮动,均载效果好,实现了大传动比; (2)高速级为平行轴圆柱斜齿轮传动,合理分配了传动比,实现了平稳输出,降低了振动。 2.2增速器整机设计 2.2.1第一级行星轮系传动设计及校核其装配条件 (1)计算齿轮基本参数 根据初定条件:
baHa
w
iZCn 即 5.23aZC
尽可能取质数,aZ=15 则C=27 15.2bbaHaZiZ 计算bZ: bZ163bwaaaHCnZZi 计算cZ: 1242cbaZZZ 初选: 24cZ 预计啮合角'ac及 'cb: 1bcacZZjZZ
选'20ac '20cb (2)校验行星轮齿装配条件: 1)同心条件 为了保证中心轮和行星架轴线重合,各对啮合齿轮间的中心距必须相等。 而对于角度变位传动,应为
''coscos
acbc
tactbc
ZZZZ
2)装配条件 由于各行星轮必须均布于中心齿轮之间。为此,各齿轮齿数与行星轮个数wn必须满足装配条件,否则,会出现行星齿轮无法装配的情况。 单排2K-H行星传动的装配条件为:两中心轮的齿数之和应为行星轮数目的
整数倍,即 27acwZZCn整数 3)邻接条件 保证相邻两行星轮的齿顶不相碰
即 '1802sinacwadn 根据以上条件,初选模数为18mm,按照技术要求查阅相关手册,确定第一级行星轮系参数如表2.2 表2.2 第一级行星轮系参数 齿数 模数 变位系数 齿顶圆 齿根圆 分度圆 螺旋角
第一级 中心轮 15 18 0.35 318.6 237.6 270 0 行星轮 24 18 -0.35 455.4 374.4 432 0 内齿圈 63 18 -0.35 1149.975 1220.4 1134 0
2.2.2第二级行星轮系传动设计及校核其装配条件 (1)计算齿轮基本参数 根据初定条件 baHa
w
iZCn 即 5.73aZC
尽可能取质数取20aZ 则 38C 15.7bbaHaZiZ 计算bZ: bZ192bwaaaHCnZZi 计算cZ: 1362cbaZZZ 初选: 36cZ 预计啮合角'ac及 'cb: 1bcacZZjZZ
选'20ac '20cb (2)校验行星轮齿装配条件: 1)同心条件 为了保证中心轮和行星架轴线重合,各对啮合齿轮间的中心距必须相等。 而对于角度变位传动,应为
''coscos
acbc
tactbc
ZZZZ
2)装配条件 由于各行星轮必须均布于中心齿轮之间。为此,各齿轮齿数与行星轮个数wn必须满足装配条件,否则,会出现行星齿轮无法装配的情况。 单排2K-H行星传动的装配条件为:两中心轮的齿数之和应为行星轮数目的
整数倍,即 38acwZZCn整数 3)邻接条件 保证相邻两行星轮的齿顶不相碰
即 '1802sinacwadn
齿高变动系数 y: 0yxy 齿顶圆直径acd: *222accacdmZhxy 14362120.3520
522.2mm '1802sin678.96acwadn
满足邻接条件 根据以上条件,初选模数为14mm,按照技术要求查阅相关手册,确定第二级行星轮系具体参数如表2.3 . 表2.3 第二级行星轮系具体参数 齿数 模数 变位系数 齿顶圆 齿根圆 分度圆 螺旋角
第一级 中心轮 20 14 0.35 317.8 254.8 280 0 行星轮 36 14 -0.35 522.2 4592 504 0 内齿圈 92 14 0.35 1230.45 1285.2 1260 0
2.2.3第三级平行轴圆柱斜齿轮设计 齿数分配如下:
170Z 233Z
具体参数如表2.4 . 表2.4第三级平行轴斜齿轮参数 齿数 模数 变位系数 齿顶圆 齿根圆 分度圆 螺旋角
第三级 斜齿轮一 70 5.5 0 412.49 387.74 401.50 '"122310
(右)
斜齿轮二 33 5.5 0 200.50 175.75 189.50 '"122310
(左)
端面模数: 0'"/cos5.5/cos1223105.6311rnmm 分度圆直径: 1401.50d 2189.50d 标准中心距: 290a
2.2.4行星齿轮具体结构的确定 (1)太阳轮的结构 为便于轴与齿轮之间的连接,本文将太阳轮制成齿轮轴的形式,并利用鼓形渐开线花键实现与上一级行星架的连接,可使中心轮在一定范围内轻微摆动,实现均载。如图2.3.