方位角与象限角
图根平面控制测量重要知识点总结

图根平面控制测量重要知识点总结、图示图根平面控制测量一、控制测量的概念所谓控制测量,就是在测区范围内布设少数点,称为控制点,将控制点连成网状,称为控制网,用高精度的仪器和方法测定控制点的平面位置和高程,测定平面位置的工作称为平面控制测量,测定高程的工作称为高程测量,合称为控制测量。
图根平面控制测量的基本计算二、直线定向1、概念确定一条直线与标准方向线之间的北夹角关系的工作叫直线定向。
B2、方位角从标准方向线的北端起,顺时针转到某直线的水平角叫方位角,角值0°~360°。
通常用α表示。
3、标准方向1)真北方向即真子午线北端方向,可认为是北极星方向。
2)磁北方向即磁子午线北端方向,是罗盘指北针所指方向。
3)坐标北方向坐标纵轴北端方向,即央子午线方向。
4)三种方位角真方位角、磁方位角、坐标方位角。
4、三种方位角之间的关系1)真方位角与磁方位角之间的关系真北与磁北之间的夹角叫磁偏角,用δ表示,以真北为准,磁北偏向真北以东,称为东偏,δ取+号,反之取-号。
α真=α磁+δ B2)真方位角与坐标方位角之间的关系真北方向与坐标北(x轴)方向之间的夹角叫子午线收敛角,用γ表示,以真北为准, x轴方向偏向真北以东,γ为正,以西γ为负。
北半球,γ与y真北 Bɑ=ɑ+ϒ真A3)坐标方位角与磁方位角之间的关系α真=α+γα=α真-γ =α磁+δ-γ = α磁+(δ-γ)= α磁+ΔΔ叫磁坐偏角。
5、坐标方位角的特性 X同一直线上各点的坐标方位角相等。
NW NE 正反坐标方位角相差180°。
Y αBA =αAB ± 180° (大于180˚—;小于180˚+) SW SE 6、象限角从标准方向线的北端或南端起,顺时针或逆时针方向转到某直线的锐角叫象限角,用R 表示,应注明象限名称。
三、坐标正算、反算 1、坐标正算公式坐标增量: 坐标: 2、坐标反算计算公式四、方位角推算⎭⎬⎫=∆=∆AB AB AB AB AB AB D y D x ααsin cos ⎭⎬⎫∆+=∆+=AB A B AB A B y y y x x x ()()⎪⎪⎭⎪⎪⎬⎫-=-=-+-=--=AB A B AB A B A B A B AB AB AB ABy y x x y y x x D x x y y αααsin cos arctan21、左观测角与右观测角2、左观测角推算公式αBC =αAB +β左-180° αBC =αAB +β左±180°3、右观测角推算公式αBC =αAB - β右± 1804、总结:五、三角形边长计算公式︒±-+=180右左后前ββαα1、正弦公式编号:推算边a ,已知边b ,间隔边c ,角A 、B 、C 。
工程测量计算
h1
hAB h a b
水准测量手簿
日期 天气 仪器 地点 观测 记录
测站 Ⅰ Ⅱ Ⅲ
测点
BMA TP1 TP1
BMA
TP1 TP1 TP2 TP2 TP2 TP2 BB
水准尺读数 后视(a) 前视(b) 1467 1.467 1124 1.124 1385 1.385 1021 1.021 1869 1.869 0943 0.943
四、水准测量的实施
如下图所示,当欲测的高程点B距水准点A较远或高差较大时,安置一次仪器不 能测出A、B两点间的高差,就要分段和连续地进行测量工作。
1、踏勘选点建立标志; 2、拟定水准路线; 3、观测记录
a3 b2 b1
TP2
b3 B
Ⅲ
a2 a1
TP1
h3
hAB
Ⅱ
h2
Ⅰ
A
h1 a1 b1 h2 a 2 b2 h3 a 3 b3
往
593.391
返
593.400
往
491.360
返
497.301
•••
••• ••• ••• ••• ••• ••• ••• •••
11o3249
118.780 1.440 1.502 0.022 +118.740
11o3306
-118.829 1.491 1.400 0.022 -118.716
O D
(2)下半测回
倒镜成盘右,逆时针依次观测A,D,C,B,A。
同理各测回间按1800/N的差值,来配置水平度盘。
B C
零方向 A O D
3.计算、记录
(1)半测回归零差: J2 ≤ 12 " ;J6 ≤ 18 " 。 (2)2C值(两倍照准误差): 2C=盘左读数-(盘右读数±180°)。 一测回内2C互差:J2≤18 " ;J6不作要求。
工程测量象限角名词解释

工程测量象限角名词解释
工程测量中,象限角是指在平面直角坐标系中,以x轴正方向为起点,逆时针旋转到某一线段与x轴正方向的夹角。
象限角一般被分为四个象限,即第一象限、第二象限、第三象限和第四象限。
第一象限是指角度落在0度到90度之间的象限,此时x轴和y轴的正方向都是正向。
第二象限是指角度落在90度到180度之间的象限,此时x轴的正方向为负向,y轴的正方向为正向。
第三象限是指角度落在180度到270度之间的象限,此时x轴和y轴的正方向都是负向。
第四象限是指角度落在270度到360度(或0度到-90度)之间的象限,此时x轴的正方向为正向,y轴的正方向为负向。
在工程测量中,象限角的概念可以用于描述和计算各种角度和方向,例如测量物体的方位角、测量线段的倾斜角度等。
通过确定所处的象限,可以更准确地描述和计算角度,提高测量的准确性和可靠性。
此外,象限角还可以应用于工程设计和建筑规划中,例如确定建筑物
的朝向、规划道路的走向等。
通过了解象限角的概念和计算方法,工程师和设计师可以更好地控制和调整设计方案,确保工程的合理性和安全性。
总之,象限角是工程测量中常用的概念,用于描述和计算角度和方向。
掌握象限角的概念和计算方法对于工程测量和设计是非常重要的。
建筑施工测量复习题

一、填空题1、测量的基本工作原则是(由整体到局部)(由控制到碎部)(由高级到低级)。
2、方位角是指(从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角)、(坐标纵轴x方向与地面直线间的顺时针水平夹角)为坐标方位角。
坐标方位角的方位是(0°~180°),而象限角的范围是(0°~90°),为了说明象限角的所在的象限,其角值前应加(方位)。
3、(地面点至大地水准面的铅垂线距离)为绝对高程,(地面点至假定水准面的铅垂线距离)为相对高程。
两个地面点之间的高程之差称为(高差)。
无论采用绝对高程还是相对高程,两点之间的高差(不变)。
4、水准测量的基本原理是利用水准仪(所提供的水平视线),测定地面两点之间的(高差),推算(高程)。
5、水准仪的粗略整平是指转动(基座脚螺旋)使圆水准器气泡居中;水准仪的精确整平是指转动(微倾螺旋)使水准管气泡居中。
6、水准测量的水准路线分为(闭合水准路线)、(符合水准路线)、(支线水准路线)。
7、使用微倾式水准仪的操作步骤是(粗平)、(瞄准)、(精平)、(读数)。
8、调解(物镜调焦)螺旋,清除视差。
1、(空间一点到两目标方向线在同一水平面上垂直投影间的夹角)称为水平角,(在同一竖直面内,一点到目标的方向线与水平仙间的夹角)称为竖直角。
竖直角为正时,称为(仰角),为负时称为(俯角)。
2、DJ6型光学经纬仪是由(照准部)、(水平度盘部)、(基座)3、经纬仪的使用是指对仪器进行(对中)、(整平)、(瞄准)、和(读数)四项操作步骤。
4、测量竖直角在竖盘读数前,应注意使(),目的是()。
5、经纬仪的竖直指标差是指(),竖盘指标差的计算公式为(x=[(L+R)-360°]÷2),也可以为(指示差)。
6、使用经纬仪的目的是(测量水平角度和竖直角度),对中的目的是(是经纬仪仪器中心线与地面点或标记位于同一铅垂线上)。
7、测回法适用于(观测由两个目标所构成的水平角),方向观测法适用于(在一个观测站观测三个以上的目标所构成的水平角)。
三种方位角之间的关系
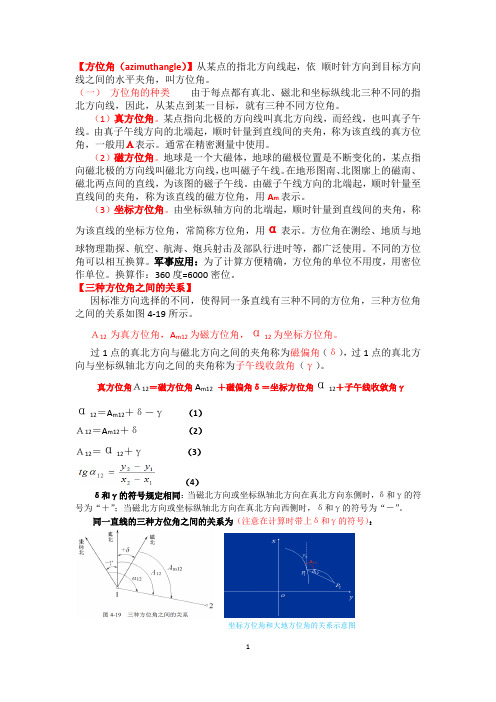
【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。
(一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。
(1)真方位角。
某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。
由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。
通常在精密测量中使用。
(2)磁方位角。
地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。
在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。
由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。
(3)坐标方位角。
由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。
方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。
不同的方位角可以相互换算。
军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。
换算作:360度=6000密位。
【三种方位角之间的关系】因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角之间的关系如图4-19所示。
A12 为真方位角,A m12为磁方位角,α12为坐标方位角。
过1点的真北方向与磁北方向之间的夹角称为磁偏角(δ),过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角(γ)。
真方位角A12=磁方位角A m12+磁偏角δ=坐标方位角α12+子午线收敛角γα12=A m12+δ-γ(1)A12=A m12+δ(2)A12=α12+γ(3)(4)δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。
同一直线的三种方位角之间的关系为(注意在计算时带上δ和γ的符号):坐标方位角和大地方位角的关系示意图上式中:γ为平面子午线收敛角,当站点在中央子午线西侧时γ为负,在东侧时为正;δ为Gauss投影的方向改化[1]。
直线定向及方位角测量

正 反 180
0
图形:正反方位角关系图及例题
1.正反方位角 X AB B AB BA
A Y
四、象限角
定义:从基本方向北端或南端量至直线的锐角 范围:0°~90° X a
Ⅳ
象限 象限角和坐标方位角 I I
Ⅱ
R a Y a
a=R a=180 °- R a=180 °+ R a=360 °- R
98 24
D
求 已知 180 右
B
90 06
90 18
BC AB 180 右
15106 180 9018 24048
81 12
C
CD BC 180 右
24048 180 8112 360 33936
δ
N N磁
γ
X
P B Y
S磁
S
磁偏角(magnetic declination)δ ——地面上同一点的真、 磁子午线方向不重合,其夹角称为磁偏角。磁子午线方向 在真子午线方向东侧,称为东偏,δ 为正。反之称为西偏, δ 为负。
子午线收敛角(mapping angle)γ ——当轴子午线方向在真 子午线方向以东,称为东偏,γ 为正。反之称为西偏,γ 为负。可见在中央子午线上,真子午线与轴子午线重合, 其他地区不重合,两者的夹角即为γ 。
Ⅲ Ⅳ
R
Ⅲ
R
Ⅱ
五、坐标方位角的计算
1、正反方位角 2、左右角 左角:水平角位于推算方向的左侧。记β 右角:水平角位于推算方向的右侧。记β
前进方向
左 右
正 反 1800
O
B
D
A
C
E
3、坐标方位角的计算公式
(整理)第七章 定向测量1
第七章定向测量第一节直线定向在数学上,两点确定一条直线,而在测量学中,还要研究直线定向,所谓直线定向,就是确定一条直线与标准方向之间的角度关系。
“北”被视为基准方向或基本方向,在测量学中所说的“北”通常是指三北方向,即:真北、磁北和坐标北。
一、三北方向1.真北方向真子午线是经过地面某点的真子午面与地球表面的交线,真子午线北端所指的方向就是真北方向,或者说真子午线的切线北方向为真北方向。
由于所有的真子午线的北端指的是共同的点(北极),所以,地面各点的真北方向是互不平行的。
真北方向的确定,一般用天文测量方法或陀螺经纬仪测量方法测定。
2.磁北方向罗盘的磁针静止时所指的方向称为磁子午线方向,其中指向北极的方向为磁北方向。
磁北的方向一般用罗盘来确定。
3.坐标北方向我国采用的是高斯平面直角坐标系,用3°带或6°带的中央子午线作为坐标纵轴,因此在该带内的直线定向,可以用该带的坐标纵轴方向作为基准方向,坐标纵线北端所指的方向为坐标北方向。
与真北方向不同的是,地面各点的坐标北方向是互相平行的。
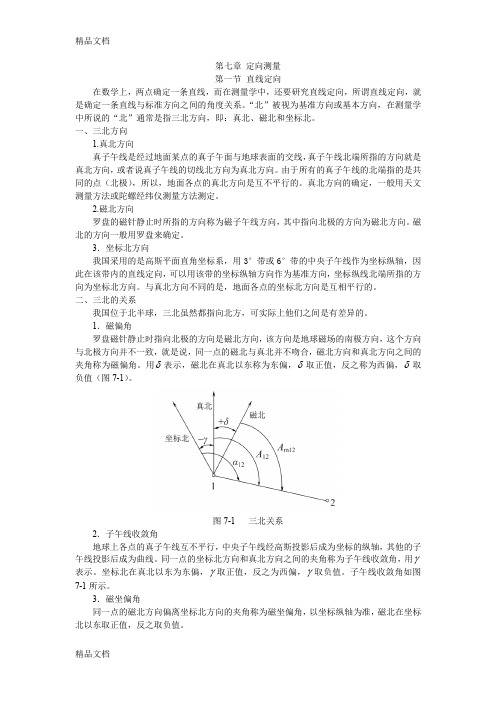
二、三北的关系我国位于北半球,三北虽然都指向北方,可实际上他们之间是有差异的。
1.磁偏角罗盘磁针静止时指向北极的方向是磁北方向,该方向是地球磁场的南极方向,这个方向与北极方向并不一致,就是说,同一点的磁北与真北并不吻合,磁北方向和真北方向之间的夹角称为磁偏角。
用δ表示,磁北在真北以东称为东偏,δ取正值,反之称为西偏,δ取负值(图7-1)。
图7-1 三北关系2.子午线收敛角地球上各点的真子午线互不平行,中央子午线经高斯投影后成为坐标的纵轴,其他的子午线投影后成为曲线。
同一点的坐标北方向和真北方向之间的夹角称为子午线收敛角,用γ表示。
坐标北在真北以东为东偏,γ取正值,反之为西偏,γ取负值。
子午线收敛角如图7-1所示。
3.磁坐偏角同一点的磁北方向偏离坐标北方向的夹角称为磁坐偏角,以坐标纵轴为准,磁北在坐标北以东取正值,反之取负值。
矿山测量学--第六章 直线定向
真方位角A与坐标方位角α之间的关系,如图6.5所示,可用下式进行换算 A12 = α12 + γ
(三)坐标方位角与磁方位角的关系
若已知某点的磁偏差δ与子午线收敛角γ,则
坐标方位角α与磁方位角Am之间的换算式为 α = Am + δ - γ
3、 正、反坐标方位角
如图6.6,直线AB的点A是起点,点B是终点;通过起点A的坐标纵
前进方向
x x
α12 1
2 β2
α23
β3 3
x
4
α34
由图中分析可知:
x
前进方向
x
α23 2 α12 α21 β2 3 β3
x
4 α34
1
α32
23 21 2 12 180 2 34 32 3 23 180 3
α45=α34+180°-β4
= -10° <0° (- 10°+360°) 350°
如图6.7,B、A为已知点,AB边的坐标方位角αAB 为已知,通过连测求得A-B边与A-1边的连接角为β′, 测出了各点的右(或左)角βA、β1、β2和β3,现在要 推算A-1、1-2、2-3和3-A边的坐标方位角。所谓右 (或左)角是指位于以编号顺序为前进方向的右(或左) 边的角度。
象限 名称 由方位角α 求象限角R 由象限角R求方位角α Ⅰ 北东(NE) R=α α =R Ⅱ 南东(SE) R=180°-α α =180°-R Ⅲ 南西(SW) R=α -180° α =180°+R Ⅳ 北西(NW) R=360°-α α =360°-R
思考题
1 为什么要进行直线定向?怎样确定直线方向? 2 何谓方位角与象限角? 3 何谓子午线收敛角和磁偏角?已知某地的磁偏角为-5°15′, 直线AB的磁方位角为134°10′,试求AB直线的真方位角。 4 已知α AB =50°10′,R CD =S30°15′W, 试求RAB和α CD。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
1 / 6
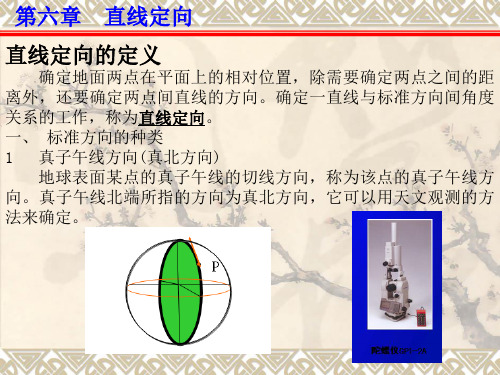
直线定向
确定地面上两点之间的相对位置,除了需要测定两点之间的水平距离外,
还需确定两点所连直线的方向。一条直线的方向,是根据某一标准方向来确定
的。确定直线与标准方向之间的关系,称为直线定向。
一、标准方向
1.真子午线方向
通过地球表面某点的真子午线的切线方向,称为该点的真子午线方向。真
子午线方向可用天文测量方法测定。
2.磁子午线方向
磁子午线方向是在地球磁场作用下,磁针在某点自由静止时其轴线所指的
方向。磁子午线方向可用罗盘仪测定。
3.坐标纵轴方向
在高斯平面直角坐标系中,坐标纵轴线方向就是地面点所在投影带的中央
子午线方向。在同一投影带,各点的坐标纵轴线方向是彼此平行的。
二、方位角
测量工作中,常采用方位角表示直线的方向。从直线起点的标准方向北端
起,顺时针方向量至该直线的水平夹角,称为该直线的方位角。方位角取值围
是0˚~360˚。因标准方向有真子午线方向、磁子午线方向和坐标纵轴方向之分,
对应的方位角分别称为真方位角(用A表示)、磁方位角(用Am表示)和坐标
方位角(用α表示)。
三、三种方位角之间的关系
.
2 / 6
因标准方向选择的不同,使得一条直线有不同的方位角,如图4-19所示。
过1点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。过1点的真
北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。
δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,
δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ
的符号为“-”。同一直线的三种方位角之间的关系为:
(4-14);
(4-15);
(4-16)
四、坐标方位角的推算
1.正、反坐标方位角
.
3 / 6
如图4-20所示,以A为起点、B为终点的直线AB的坐标方位角α
ΑB
,称为
直线AB的坐标方位角。而直线BA的坐标方位角αBA,称为直线AB的反坐标
方位角。由图4-20中可以看出正、反坐标方位角间的关系为:
(4-17)
2.坐标方位角的推算
在实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标
方位角的直线连测后,推算出各直线的坐标方位角。如图4-21所示,已知直线
12的坐标方位角α12,观测了水平角β2和β3,要求推算直线23和直线34的坐
标方位角。
.
4 / 6
由图4-21可以看出:
因β2在推算路线前进方向的右侧,该转折角称为右角;β3在左侧,称为左
角。从而可归纳出推算坐标方位角的一般公式为:
(4-18)
(4-19)
计算中,如果α前>360˚,应自动减去360°;如果α前<0˚,则自动加上360˚。
五、象限角
1.象限角
.
5 / 6
由
坐标纵轴的北端或南端起,沿顺时针或逆时针方向量至直线的锐角,
称为该直线的象限角,用R表示,其角值围为0˚~90˚。如图4-22所示,直线
01、02、03和04的象限角分别为北东R01、南东R02、南西R03和北西R04。
2.坐标方位角与象限角的换算关系
由图4-23可以看出坐标方位角与象限角的换算关系:
在第Ⅰ象限,R=α在第Ⅱ象限,R=180°-α
在第Ⅲ象限,R=α-180°在第Ⅳ象限,R=360°-α
.
6 / 6
不同象限坐标增量的符号
坐标方位角与其所在象限 之符号 之符号
(第一象限)
+ +
(第二象限)
- +
(第三象限)
- -
(第四象限
+ -