单片机课件 第三章
合集下载
CH3 MCS-51单片机指令系统-1 单片机优秀课件

邮箱!
2020/7/3
§3-3 寻址方式
寻址方式:寻找操作数存放单元的地址的方式。 1、立即寻址 1)定义
操作数在指令中直接给出,通常把出现在指令中的 操作数称之为立即数,因此就把这种寻址方式称之为 立即寻址。 2)举例
8位立即数操作:MOV A,#data 1620/7/3
MCS-51指令格式: [标号:] [操作码][第一操作数][,第二操作数][;注释]
LOOP: MOV A,#40H ;取参数
§3-2 指令格式
助记符举例:
MOV __ move
传送
XCH __ exchange
交换
ANL __ and logic
与逻辑运算
XRL __ exclusive or logic 异或运算
CH3 MCS-51单片机指令系统及汇编程序设计
内容提要: §3-1 指令系统简介 §3-2 指令格式 §3-3 寻址方式 §3-4 指令系统 §3-5 汇编语言程序设计 CH3 习题课
2020/7/3
2020/7/3
§3-2 指令格式
指令 = 操作码 + 操作数 操作码:表示了该指令所能执行的操作功能。 操作数:表示参加操作的数的本身或操作数所在的地址。
MUL __ multiply
乘法
RR __ rotate right
右循环
SJMP __ short jump
短跳转
RET __ return
子程序返回
§3-2 指令格式
操作数的表示形式: (1)无操作数或操作数隐藏在操作码中
如:NOP RET
(2)只有一个操作数 如:INC A DEC A
(3)有两个操作数 如:MOV A, #00H
2020/7/3
§3-3 寻址方式
寻址方式:寻找操作数存放单元的地址的方式。 1、立即寻址 1)定义
操作数在指令中直接给出,通常把出现在指令中的 操作数称之为立即数,因此就把这种寻址方式称之为 立即寻址。 2)举例
8位立即数操作:MOV A,#data 1620/7/3
MCS-51指令格式: [标号:] [操作码][第一操作数][,第二操作数][;注释]
LOOP: MOV A,#40H ;取参数
§3-2 指令格式
助记符举例:
MOV __ move
传送
XCH __ exchange
交换
ANL __ and logic
与逻辑运算
XRL __ exclusive or logic 异或运算
CH3 MCS-51单片机指令系统及汇编程序设计
内容提要: §3-1 指令系统简介 §3-2 指令格式 §3-3 寻址方式 §3-4 指令系统 §3-5 汇编语言程序设计 CH3 习题课
2020/7/3
2020/7/3
§3-2 指令格式
指令 = 操作码 + 操作数 操作码:表示了该指令所能执行的操作功能。 操作数:表示参加操作的数的本身或操作数所在的地址。
MUL __ multiply
乘法
RR __ rotate right
右循环
SJMP __ short jump
短跳转
RET __ return
子程序返回
§3-2 指令格式
操作数的表示形式: (1)无操作数或操作数隐藏在操作码中
如:NOP RET
(2)只有一个操作数 如:INC A DEC A
(3)有两个操作数 如:MOV A, #00H
第3章80C51系列单片机的硬件基础知识
21:52
9
图3-8 80C51单片机对外三总线构成
21:52 10
四个I/O端口P0、P1、P2、P3的作用总结: P2口负责输出高8位地址, P0口以分时方式承担输出低8位地址信息和数据输入/输出的 双重任务。 P3口则作为和外设沟通的控制线, P1口可随意用作I/O口。 51系列单片机的对外三总线总结: AB(地址总线): P2口负责高8位地址, P0口输出低8位地址。 DB(地址总线): P0口作为8位数据输入/输出口。 CB(地址总线): P3口作为和外设沟通的控制线。
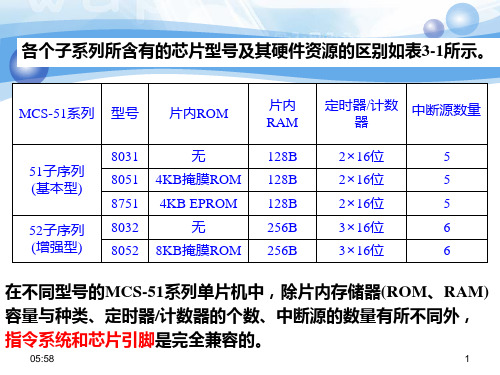
各个子系列所含有的芯片型号及其硬件资源的区别如表3-1所示。
片内 RAM 128B 128B 128B 256B 256B 定时器/计数 中断源数量 器 2×16位 2×16位 2×16位 3×16位 3×16位 5 5 5 6 6
MCS-51系列
型号 8031
片内ROM 无 4KB掩膜ROM 4KB EPROM 无 8KB掩膜ROM
51子序列 (基本型)
8051 8751 8032 8052
52子序列 (增强型)
在不同型号的MCS-51系列单片机中,除片内存储器(ROM、RAM) 容量与种类、定时器/计数器的个数、中断源的数量有所不同外, 指令系统和芯片引脚是完全兼容的。
21:52 1
80C51单片机引脚主要分为主电源引脚、外接晶体 引脚 、输入/输出引脚与控制引脚四类,以PDIP 封装的单片机为例,引脚介绍如下: 1. 主电源引脚(2条) 2. 外接晶体引脚(2条) 3. 输入/输出(I/O)引脚(32条) 4. 控制引脚(4条)
21:52
15
3. 并行输入/输出端口(I/O口)
80C51片内有4个8位的I/O接口:P0、P1、P2和P3,每个I/O接 口内部都有一个8位锁存器和一个8位驱动器,既可用作输出 口,也可用作输入口。 80C51单片机没有专门的I/O口操作指令,而是把I/O口当作寄 存器使用,通过传送指令实现数据的输入和输出操作。
《单片机原理及应用》ppt课件

• 可靠性:选用经过稳定测试、质量可靠的 外围设备。
外围设备配置原则与选型建议
常用外围设备类型
如键盘、显示器、打印机、A/D和D/A转换器等。
选型注意事项
关注设备的性能指标、接口类型、尺寸大小及价格等因素。
典型外围设备配置案例分析
案例一
基于单片机的温度监控系统
外围设备配置
温度传感器、A/D转换器、LCD 显示器等。
典型应用系统设计案例分析
智能家居控制系统
以单片机为核心,实现对家居 环境的监测和控制,如温度、
湿度、光照等。
工业自动化控制系统
通过单片机实现对工业设备的 自动化控制,提高生产效率和 产品质量。
物联网终端设备
将单片机作为物联网终端设备 的核心控制器,实现数据采集 、处理和传输等功能。
医疗电子设备
利用单片机实现医疗电子设备 的智能化和便携化,如血压计
子程序的定义、参数传递、局部 变量与全局变量的使用等。
典型汇编语言程序实例分析
逻辑运算程序
与、或、非等基本逻辑运算的 汇编实现。
控制转移程序
条件转移、无条件转移等控制 转移的汇编实现。
算术运算程序
加法、减法、乘法、除法等基 本算术运算的汇编实现。
数据传送程序
内存与寄存器之间、寄存器与 寄存器之间数据传送的汇编实 现。
如医疗监护仪、便携 式医疗设备等。
作为物联网终端设备 的核心控制器,实现 数据采集、传输和控 制等功能。
常见单片机类型及特点
8051系列
PIC系列
具有高性能、低功耗、易于编程和调试等 特点,广泛应用于工业控制和智能家居等 领域。
具有高性能、低功耗、丰富的外设接口和 强大的中断处理能力等特点,适用于各种 复杂的应用场景。
外围设备配置原则与选型建议
常用外围设备类型
如键盘、显示器、打印机、A/D和D/A转换器等。
选型注意事项
关注设备的性能指标、接口类型、尺寸大小及价格等因素。
典型外围设备配置案例分析
案例一
基于单片机的温度监控系统
外围设备配置
温度传感器、A/D转换器、LCD 显示器等。
典型应用系统设计案例分析
智能家居控制系统
以单片机为核心,实现对家居 环境的监测和控制,如温度、
湿度、光照等。
工业自动化控制系统
通过单片机实现对工业设备的 自动化控制,提高生产效率和 产品质量。
物联网终端设备
将单片机作为物联网终端设备 的核心控制器,实现数据采集 、处理和传输等功能。
医疗电子设备
利用单片机实现医疗电子设备 的智能化和便携化,如血压计
子程序的定义、参数传递、局部 变量与全局变量的使用等。
典型汇编语言程序实例分析
逻辑运算程序
与、或、非等基本逻辑运算的 汇编实现。
控制转移程序
条件转移、无条件转移等控制 转移的汇编实现。
算术运算程序
加法、减法、乘法、除法等基 本算术运算的汇编实现。
数据传送程序
内存与寄存器之间、寄存器与 寄存器之间数据传送的汇编实 现。
如医疗监护仪、便携 式医疗设备等。
作为物联网终端设备 的核心控制器,实现 数据采集、传输和控 制等功能。
常见单片机类型及特点
8051系列
PIC系列
具有高性能、低功耗、易于编程和调试等 特点,广泛应用于工业控制和智能家居等 领域。
具有高性能、低功耗、丰富的外设接口和 强大的中断处理能力等特点,适用于各种 复杂的应用场景。
51单片机超详细教程PPT(绝对值)
必须使必须使rstrst引脚持续引脚持续22微秒微秒高电平高电平外部时钟外部时钟12mhz12mhz10111213142827262524232221201918171615101112131428272625242322212019181716151011121314151617181920403938373635343332313029282726252424222110111213142827262524232221201918171615ram626410111213142827262524232221201918171615ram626480318751805189c51ramramromrom256b字节4k1程序存储器程序存储器程序存储器内部外部0000h0fffh4k0000hffffh64k0000h0fffh4k0000h0001h0002hpc0000h是程序执行的起始单元在这三个单元存放一条无条件转移指令中断5中断4中断3中断2中断10003h000bh0013h001bh0023h002bh外部中断0定时器0中断外部中断1定时器1中断串行口中断0fffh0ffehea1ea0程序存储器资源分布中断入口地址在单片机c语言程序设计中用户无需考虑程序的存放地址编译程序会在编译过程中按照上述规定自动安排程序的存放地址
00
3区
外部
FFH 80H 7FH (低128B) 00H (高128B) 专用 寄存器 内部 RAM 0000H
1FH 18H 17H 10H 0FH 08H 07H 00H
2区
工作寄存器区
1区 0区
数据存储器
内部RAM存储器
RAM位寻址区位地址表
单元地址 MSB
2FH 2EH 2DH 2CH 2BH 2AH 29H 28H 27H 26H 25H 24H 23H 22H 21H 20H 7F 77 6F 67 5F 57 4F 47 3F 37 2F 27 1F 17 0F 07 7E 76 6E 66 5E 56 4E 46 3E 36 2E 26 1E 16 0E 06 7D 75 6D 65 5D 55 4D 45 3D 35 2D 25 1D 15 0D 05
00
3区
外部
FFH 80H 7FH (低128B) 00H (高128B) 专用 寄存器 内部 RAM 0000H
1FH 18H 17H 10H 0FH 08H 07H 00H
2区
工作寄存器区
1区 0区
数据存储器
内部RAM存储器
RAM位寻址区位地址表
单元地址 MSB
2FH 2EH 2DH 2CH 2BH 2AH 29H 28H 27H 26H 25H 24H 23H 22H 21H 20H 7F 77 6F 67 5F 57 4F 47 3F 37 2F 27 1F 17 0F 07 7E 76 6E 66 5E 56 4E 46 3E 36 2E 26 1E 16 0E 06 7D 75 6D 65 5D 55 4D 45 3D 35 2D 25 1D 15 0D 05
计算机接口技术课件 第三章 MCS-51单片机汇编语言与程序设计基础
例2:编制一段程序,要求在端口线 :编制一段程序,要求在端口线P1.0,P1.1上分别产生周期为 , 上分别产生周期为 200us和400us的方波.设单片机的外接频率为 的方波. 和 的方波 设单片机的外接频率为12MHz. . 分析:利用定时器产生方波,将定时器设置成为工作方式 , 分析:利用定时器产生方波,将定时器设置成为工作方式3,将寄 存器T0定时 定时100us,T1定时 定时200us,达到定时时间后引起中断,在中 存器 定时 , 定时 ,达到定时时间后引起中断, 断服务程序中各自将P1.0和P1.1引脚取反. 引脚取反. 断服务程序中各自将 和 引脚取反 定时器预设值的设置: 定时器预设值的设置: 单片机的晶体振荡频率为12MHz,计时器的计时频率为1MHz,机 单片机的晶体振荡频率为 ,计时器的计时频率为 , 器周期为1us. 定时 定时100us,因此寄存器 需要计数 需要计数100次 器周期为 . T0定时 ,因此寄存器T0需要计数 次 ,其预 置值为64H+1=9CH. T1定时 定时200us,因此寄存器 需要计数 需要计数200次 置值为 . 定时 ,因此寄存器T1需要计数 次 其预置值为C8H+1=38H. ,其预置值为 . 定时器T0,T1的工作方式设置: 的工作方式设置: 定时器 的工作方式设置 T0采用工作方式 ,因此 采用工作方式3,因此TMOD寄存器的值设置为 寄存器的值设置为#22H. 采用工作方式 寄存器的值设置为 . 定时器T0,T1的控制设置: 的控制设置: 定时器 的控制设置 打开T0, ;要求TCON寄存器的值设置为 寄存器的值设置为#50H. 打开 ,T1;要求 寄存器的值设置为 .
定义存储区域的大小. 6. DS —定义存储区域的大小. 定义存储区域的大小 例: ORG 0350H DS 3
第三章 AVR系列单片机快速上手

图3.3.1
图3.3.2
3.4 程序文件的编译、连接 程序文件的编译、 节中的项目, 接3.3节中的项目,点击快捷菜单中的 进行 节中的项目 代码的编译,编译结果如图3.4.1所示,由于项 所示, 代码的编译,编译结果如图 所示 目的源文件中没有实质性的代码, 目的源文件中没有实质性的代码,所以编译的 结果是 。尽管如此,项目会生成一个 尽管如此, 下载代码文件 ,将这个文件下载到单 片机中就完成了整个开发的基本过程。 片机中就完成了整个开发的基本过程。
3.2.2 ICCAVR软件的安装 软件的安装 (1)系统要求 系统要求 此软件支持的操作系统: 此软件支持的操作系统: Windows98\ME\2000\XP\2003 (2)ICCAVR编译软件的安装: 编译软件的安装: 编译软件的安装 找到安装文件iccvar6.31A.exe,按正常程序安 天的试用版, 装即可完成45天的试用版,软件的注册请参编译软件的运行 编译软件的运行 1.点击Windows的开始按钮中的“程序选项中的 “ImageCraft Development Tools”选项中的 “ICC AVR”选项 。 2.安装的软件是45的试用版,在菜单栏中点击 HELP—REGISTER—OK,弹出如图3.2.1所示 的LICENSE窗口,根据自己机器的硬件编码如 “10 38 FE AC C2 3B AB”,通过邮件获取 “unlock code”如“03 9B 64 C1 0B E0 66 15 A1 ……”并填入,然后点击LSENCE按钮,即 完成注册.如图3.2.2. 从启ICC软件,即可正常使 用
(6)在“Device Configuration”下拉框中选择 CPU的型号,在此选择“ATMega16”,其他 选项都按默认值.,点击OK。 (7)点击 图标创建一个新的源文件,输入信 息,点击保存 。 (8)在项目管理部分“Files”点击右键选择 “Add File(s)”,将刚刚保存的Hello_AVR.c添 加如工程 (9)在项目管理部分“Files”点击右键选择 “Add File(s)”,将刚刚保存的Hello_AVR.c添 加如工程,如图3.3.2所示。 这样一个ICCAVR工程就创建完毕了
第三章 MSP430F149通用数字端口
PxOUT 寄存器每一位是相应引脚配置为通用 O 输出时的输出值。
0 PxOUT.0
PxOUT.x=0,输出低电平
PxOUT.x=1,输出高电平
例:
P2DIR |=BIT0+BIT2+BIT4;//将 P2.0/P2.2/P2.4 设置为输出
P2OUT |=BIT0+BIT2+BIT4;//P2.0/P2.2/P2.4 输出高电平
P6DIR |=BIT0;//P6.0 设置为输出 P6OUT |=BIT0;//P6.0 输出高电平关闭 LED 灯
P1IES &=~BIT0;//P1.0 中断上升沿触发 P1IFG &=~BIT0;//清除 P1.0 中断标志 P1IE |=BIT0;//允许 P1.0 中断 _EINT();//开放系统中断 while(1) {
P6OUT ^=(BIT0+BIT2+BIT4+BIT6);//P6.0/2/4/6 端口 LED 闪烁 for(i=0;i<50000;i++);//延时 } }
应用二:软件定时,使 P6.0 输出方波使 LED 灯闪烁。程序如下:
#include <msp430x14x.h> void main( void ) {
PxIFG.x=0,没有中断发生
PxIFG.x=1,有中断发生
注意:写 PxOUT.x、PxDIR.x 将导致相应标志位 PxIFG.x 置位;I/O 脚上的中断事件
必须保持 1.5 倍 MCLK 周期以上才能保证中断被识别并使相应标志位置位。
(7)中断触发沿选择寄存器 PxIES(x=1,2)
7 PxIES.7
应用三:在 P3.0 上产生方波,将 P3.0 与 P1.0 相连,P1.0 接收中断,在中断程序中
03.7 第三章 - 单片机指令系统(算术运算类指令ADD,ADDC,SUBB,MUL,DIV,INC,DEC,DA)
Cy AC F0 RS1 RS0 OV
-
P
▪ RS1,RS0:工作寄存器选择标志位
RS1
0 0 1 1
RS0
0 1 0 1
寄存器
组0 组1 组2 组3
3.7.1 程序状态寄存器PSW
❖ 举例:
▪ 计算11101011B + 10111000B 后PSW各标志位值?
b7 b6
b3
1110 1011
+ 、1、0、1 1、 、1 0 0 0
PSW.3 RS0
PSW.2 OV
PSW.1 -
PSW.0 P
结果:C=1 AC=1 OV=1 P=0
3.7.1 程序状态寄存器PSW
PSW.7 PSW.6 PSW.5 PSW.4 PSW.3 PSW.2 PSW.1 PSW.0
Cy AC F0 RS1 RS0 OV
-
P
▪ Cy:进位标志位C
加减运算后,b7位有进或借位时,则Cy = 1,反之则Cy = 0
1 1010 0011
Cy
A
A = A3H Cy = 1 AC = 1 OV = 0 P =0
3.7.1 程序状态寄存器PSW
❖ 练习:
▪ 计算10111011B + 111011B 后PSW各标志位值? ▪ 计算9BH + C9H 后PSW各标志位值? ▪ 计算25 + 21 后PSW各标志位值?
功能:A = (A)+ 源操作数的值 + Cy
3.7.2 加法指令(ADD、ADDC、INC)
❖ 举例
▪ 已知 A = 0C3H,(R0)= 0AAH,Cy = 1执行 ADDC A,R0后,A = ,标志位Cy ,AC ,OV ,P
第3章MCS-51单片机的中断系统
某人看书执行主程序日常事务电话铃响中断信号int0中断请求暂停看书暂停执行主程序中断响应书中作记号当前pc入栈保护断点电话谈话执行io程序中断服务继续看书返回主程序中断返回执行主程序主程序继续执行主程序断点中断请求中断响应执行中断处理程序中断返回中断与转子的区别中断是随机的转子事先编程决定断点
3.3 MCS-51的中断系统 的中断系统
4、中断响应过程 、 关中断:屏蔽其它中断请求信号。 关中断:屏蔽其它中断请求信号。 保护断点:将断点地址压入堆栈保存,即当前 值入栈 值入栈。 保护断点:将断点地址压入堆栈保存,即当前PC值入栈。 寻找中断源:中断服务程序入口地址送 ,转入中断服务。 寻找中断源:中断服务程序入口地址送PC,转入中断服务。 保护现场:将中断服务程序使用的所有寄存器内容入栈。 保护现场:将中断服务程序使用的所有寄存器内容入栈。 中断处理:执行中断源所要求的程序段。 中断处理:执行中断源所要求的程序段。 恢复现场:恢复被使用寄存器的原有内容。 恢复现场:恢复被使用寄存器的原有内容。 开中断:允许接受其它中断请求信号。 开中断:允许接受其它中断请求信号。 中断返回:执行 指令, 中断返回:执行RETI指令,栈顶内容 指令 栈顶内容→PC,程序跳转回断点。 ,程序跳转回断点。
当前PC入栈 书中作记号 当前 入栈
主程序 执行主程序 中断请求 断点 继续执行主程序 中断返回 执行中断 处理程序 中断响应
中断与转子的区别 中断是随机的, 中断是随机的,转子事先编程决定
3.3.1 中断的定义 2、几个术语 、 主程序:原来正常运行的程序称为主程序。 主程序:原来正常运行的程序称为主程序。 断点: 主程序被断开的位置(或地址)称为“断点” 断点 主程序被断开的位置(或地址)称为“断点”。 中断源:引起中断的原因,或发出中断申请的来源。 中断源 引起中断的原因,或发出中断申请的来源。 引起中断的原因 中断请求:中断源要求服务的请求称为“中断请求” 中断请求 中断源要求服务的请求称为“中断请求” 。 中断源要求服务的请求称为 中断响应: 终止当前执行的程序, 中断响应:CPU终止当前执行的程序,去执行相应中断源 终止当前执行的程序 的中断请求。 的中断请求。 中断服务或中断处理程序: 中断服务或中断处理程序: “中断”之后所执行的相应的处理程序。 中断”之后所执行的相应的处理程序。 中断系统:能够实现中断处理功能的部件。 中断系统:能够实现中断处理功能的部件。
3.3 MCS-51的中断系统 的中断系统
4、中断响应过程 、 关中断:屏蔽其它中断请求信号。 关中断:屏蔽其它中断请求信号。 保护断点:将断点地址压入堆栈保存,即当前 值入栈 值入栈。 保护断点:将断点地址压入堆栈保存,即当前PC值入栈。 寻找中断源:中断服务程序入口地址送 ,转入中断服务。 寻找中断源:中断服务程序入口地址送PC,转入中断服务。 保护现场:将中断服务程序使用的所有寄存器内容入栈。 保护现场:将中断服务程序使用的所有寄存器内容入栈。 中断处理:执行中断源所要求的程序段。 中断处理:执行中断源所要求的程序段。 恢复现场:恢复被使用寄存器的原有内容。 恢复现场:恢复被使用寄存器的原有内容。 开中断:允许接受其它中断请求信号。 开中断:允许接受其它中断请求信号。 中断返回:执行 指令, 中断返回:执行RETI指令,栈顶内容 指令 栈顶内容→PC,程序跳转回断点。 ,程序跳转回断点。
当前PC入栈 书中作记号 当前 入栈
主程序 执行主程序 中断请求 断点 继续执行主程序 中断返回 执行中断 处理程序 中断响应
中断与转子的区别 中断是随机的, 中断是随机的,转子事先编程决定
3.3.1 中断的定义 2、几个术语 、 主程序:原来正常运行的程序称为主程序。 主程序:原来正常运行的程序称为主程序。 断点: 主程序被断开的位置(或地址)称为“断点” 断点 主程序被断开的位置(或地址)称为“断点”。 中断源:引起中断的原因,或发出中断申请的来源。 中断源 引起中断的原因,或发出中断申请的来源。 引起中断的原因 中断请求:中断源要求服务的请求称为“中断请求” 中断请求 中断源要求服务的请求称为“中断请求” 。 中断源要求服务的请求称为 中断响应: 终止当前执行的程序, 中断响应:CPU终止当前执行的程序,去执行相应中断源 终止当前执行的程序 的中断请求。 的中断请求。 中断服务或中断处理程序: 中断服务或中断处理程序: “中断”之后所执行的相应的处理程序。 中断”之后所执行的相应的处理程序。 中断系统:能够实现中断处理功能的部件。 中断系统:能够实现中断处理功能的部件。
课件all
MCS-51的内部数据存储器(RAM)单元共有 128个,字节地址为00H~7FH。 地址为00H~1FH的32个 单元是4个通用工作寄存器区, 每个区含8个8位寄存器,编 号为R0~R7。
地址为20H~2FH的16个 单元可进行共128位的位寻址, 这些单元构成了1位处理机的 存储器空间。
特殊功能寄存器(SFR)
MCS-5l与键盘、显示器、打印机
的接口设计
第十四章 MCS-51程序设计及实用子程序
第一章
单片微型计算机概述
单片机的定义 单片机的分类
单片机的历史
单片机的发展趋势
单片机的特点
单片机的应用范围
定义:(目前还没有一个明确的定义)
普遍认为单片机是在一块硅片上集成了中央 处理器(CPU),存储器(RAM,ROM,EPROM)
4.可以很方便地实现多机和分布式控制。
单片机的应用范围 :
1.工业方面:各种测控系统,数据采集系统,工业 机器人,智能化仪器,机、电一体化产品。 图片实例 2.智能仪器仪表方面:单片机应用在智能仪器、仪表 方面,不仅使传统的仪器仪表发生根本的变革,也给传统 的仪器、仪表行业改造带来了曙光。
智能仪器
1.数据存储器(RAM):片内为128个字节(单元), 片外最多可外扩至64K字节。 2 . 程 序 存 储 器 (ROM/EPROM) : 8031 无 此 部 件 ; 8051为4K ROM;8751则为4K EPROM。片外最多 可外扩至64K字节。 3.中断系统:具有5个中断源,2级中断优先权。 4.定时器/计数器:2个16位的定时器/计数器, 具有四种工作方式。 5.串行口:1个全双工的串行口,具有四种工作 方式。
6.P1口、P2口、P3口、P0口:为4个并行8 位I/O口。 7.特殊功能寄存器(SFR):共有21个,用 于对片内各功能模块进行管理、控制、 监视。实际上是一些控制寄存器和状态 寄存器,是一个特殊功能的RAM区。 8.微处理器(CPU):为8位的CPU,且内含 一个1位CPU(位处理器),不仅可处理字 节数据,还可以进行位变量的处理。