曲柄滑块机构的MATLAB仿真
基于MATLAB和ADAMS的叉车曲柄滑块式转向机构优化分析

4 结束语
龙源期刊网
对叉车曲柄滑块式转向机构进行了几何、运动分析,建立了相应的数学模型,使用 MATLAB 工具箱对机构进行了优化分析.根据 MATLAB 提供的优化尺寸数据,在 ADAMS 软 件中对其建模并进行了运动仿真分析,得到样机内、外轮转角关系,同时将内、外轮转角关系 在实际样机和理论情况下做对比.最终可知,通过 MATLAB 优化后的转向机构尺寸所建立的样 机,其内、外轮转角关系与理想状态下的内、外转角关系极为吻合,最大转角误差不超过 0.7°,满足工作需要.
3 转向机构模型验证分析
根据 MATLAB 优化后的机构尺寸,利用 ADAMS 软件[3]对转向机构进行几何体建模, 并施加约束副和驱动副,最终样机模型如下:
在样机模型上对内、外车轮转角分别创建测量函数,并利用 ADAMS/PostProcessor 绘制 出内、外轮转角的关系曲线,图 4 中横坐标为该机构的内轮转角,纵坐标为该机构的外轮转角.
龙源期刊网
龙源期刊网
摘要:曲柄滑块式转向机构是一种常见的转向机构,其作为叉车转向桥的核心机构对叉 车的转向功能具有至关重要的作用.本文通过对该机构空间运动分析、数学建模,确定出了该 机构外轮实际转角、理论转角之间的关系,将两者之间的最大偏差值的最小化作为优化目标, 利用 MATLAB 提供的优化算法,对该机构进行优化设计.根据优化所得尺寸参数,在 ADAMS 中建立相應的虚拟样机,对样机做了运动仿真分析,分析数据表明优化参数合理、准确.
低频率的直线行驶、高频率的转向是叉车作业主要特点,频繁的转向会造成叉车轮胎寿 命大大缩短,因此,对叉车转向机构进行优化设计分析具有深远的意义.
基于Matlab的多体动力学仿真实现
西南大学本科毕业论文(设计)
基于 Matlab 的多体动力学仿真实现
摘要:本文运用机械原理、理论力学和 MATLAB 运动学仿真的相关知识,对曲柄滑块机构进行 结构分析,拆分基本杆组,运用 MATLAB 的 Simulink 软件包编写各基本构件的函数模块,并 在 Simulink 中建立曲柄滑块的仿真模型,对曲柄滑块机构进行动力学仿真求解,并绘制出构 件 2 的角速度和角加速度,构件 3 速度、加速度,转动 A 副的水平方向力、垂直方向力,曲 柄上作用的力矩,曲柄上力矩作的功,以及滑块上作用的反力曲线。通过分析所绘制出的图 形,可以很好的帮助我们了解曲柄滑块机构在运行过程中各构件、转动副之间的受力情况。 关键词:MATLAB;Simulink;运动学仿真;曲柄滑块
1.2.1 打开 MATLAB..........................................................................................8 1.2.2 操作界面...............................................................................................9 1.2.3 帮助系统...............................................................................................9 1.2.4 MATLAB 常用工具箱...........................................................................10 1.3 认识 Simulink...............................................................................................11 1.3.1 功能..................................................................................................11 1.3.2 特点..................................................................................................12 2 仿真模拟..................................................................................................................12 2.1 模块函数的建立............................................................................................12 2.1.1 曲柄的 MATLAB 运动学仿真模块......................................................12 2.1.2 R-R-PⅡ级杆组基本杆组的 MATLAB 运动学仿真模块....................14 2.1.3 曲柄的 MATLAB 动力学仿真模块......................................................16 2.1.4 R-R-PⅡ级杆组基本杆组的 MATLAB 动力学仿真模块....................18 2.2 Simulink 仿真模型的建立..........................................................................21 2.2.1 曲柄滑块机构各参数分析.................................................................21 2.2.2 曲柄滑块机构各参数分析.................................................................22 2.3 开始仿真.......................................................................................................25 3 仿真结果..................................................................................................................25 参考文献......................................................................................................................27 致谢..............................................................................................................................28
偏置曲柄滑块机构的运动仿真与

e=0.15
=ve=03
,观
察
曲
线
,可
以
看
出
当
偏
心
距
最
大时,滑块 速 度 最 先 降 低 到 零,说 明 随 着 偏 心 距 的 增
加 ,机 构 的 速 度 波 动 变 大 。
图5为不同偏心距下滑块加速度随时间的变化规
律。当e=0,即对心机 构 时,加 速 度 曲 线 左 右 对 称,而
随 着 偏 心 距 的 增 大 ,逐 渐 出 现 了 左 右 不 对 称 的 现 象 ,这
机构中杆 AB 的 长 度 crank_length=400 mm,杆 BC 的长度 rod_length=1 200 mm,滑 块 的 长 度l= 100mm。 假 设 以 上 各 杆 均 为 截 面 直 径 Φ20 mm 的 圆 杆,在 Body模块中,需 要 输 入 刚 体 的 惯 性 张 量。 根 据 理 论 力 学 的 知 识 ,杆 件 的 惯 性 张 量 计 算 公 式 为 :
第 5 期 (总 第 174 期 ) 2012 年 10 月
机械工程与自动化 MECHANICAL ENGINEERING & AUTOMATION
文 章 编 号 :1672-6413(2012)05-0057-02
No.5 Oct.
偏置曲柄滑块机构的运动仿真与分析
韩 刚,龚 灯
(安徽国防科技职业学院 机械系,安徽 六安 237011)
收 稿 日 期 :2012-03-13; 修 回 日 期 :2012-05-25 作者简介:韩刚 (1983-),男,安徽巢湖人,助教,硕士,研究方向:精密加工与仿真。
· 58 ·
机 械 工 程 与 自 动 化 2012年第5期
曲柄滑块机构的优化设计及运动仿真学位论文
曲柄滑块机构的优化设计及运动仿真学位论文曲柄滑块机构的优化设计及运动仿真目录目录...............................................................1 摘要............................................................... 第1章绪论........................................................ 选题的目的及意义............................................. 优化设计方法的概述........................................... 国内外的研究现状............................................ 主要研究内容............................................ 第2章曲柄滑块机构的受力分析......................................曲柄滑块机构的分类...........................................曲柄滑块机构的动力学特性.....................................曲柄滑块机构中运动学特性..................................... 第3章偏置式曲柄滑块机构的优化设计................................ 优化软件的介绍.............................................. MATLAB的发展历程和影响...................................MATLAB 在机构设计中的应用................................. 机构优化设计实例分析........................................ 设计目标的建立...........................................根据设计要求,确定约束条件................................利用MATLAB进行优化设计.................................... 编制优化程序.............................................. 程序运行结果及处理........................................ 对优化结果进行验证和分析................................. 第4章偏置曲柄滑块机构的运动学建模与仿真.......................... 偏置曲柄滑块机构运动特性建模................................ 仿真环境简介............................................. 机构的运动学建模........................................ 运动学仿真的实现.......................................... 函数的编制及初始参数的设定............................... 构建Simulink仿真框图.................................... 对仿真结果进行分析...................................... 总结...............................................................〔Toolboxs〕组成虽然该软件的初衷并不是为控制系统设计的,但它提供了强大的矩阵处理和绘图功能,可靠灵活且方便,非常适合现代控制理论的计算机辅助设计。
曲柄滑块机构的运动仿真

曲柄滑块机构的运动仿真赵晶群2150820041曲柄滑块机构有对心曲柄滑块、偏置曲柄滑块和偏心轮机构三种,如图: 图1对心曲柄滑块机构对心曲柄滑块:滑块上转动副中心的移动方位线通过曲柄旋转中心。
对心曲柄滑块,其极位角为0,形成速比系数为1,滑块在往返中平均速度相等。
图2 偏置曲柄滑块机构偏置曲柄滑块:滑块上转动副中心的移动方位线不通过曲柄旋转中心。
其极位角不为0,具有急回特征,常被用来节省空回行程的时间,以提高劳动生产率。
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中。
活塞式发动机以滑块为主动件,把往复移动转换为不整周或整周的回转运动;压缩机、冲床以曲柄为主动件,把整周转动转换为往复移动。
偏置曲柄滑块机构的滑块具有急回特性,锯床就是利用这一特性来达到锯条的慢进和空程急回的目的。
当曲柄长度很小时,通常把曲柄滑块做成偏心轮,这样不仅增大了轴颈的尺寸,提高偏心轮的强度和刚度,而且当轴颈位于中部时,还可以安装整体样式连杆,使得结构简化。
偏心轮机构可以实现非线性传动关系,且传动平稳,结构紧凑,动力平衡性好。
图3 偏心轮机构曲柄滑块的运动仿真分为以下四个步骤:(1)建立曲柄滑块机构所需构件:机架、曲柄、连杆、滑块(2)装配(3)运动仿真(4)运动分析一、建立曲柄滑块机构所需构件1、机架启动Pro/E,新建文件:选“零件”/“实体”,文件名jijia-1,以front 平面为草绘平面。
确定打钩,对称拉伸,拉伸距离为5.1、机架绘制一个直径为5mm的圆,拉伸长度为140mm拉出两个圆柱凸台:绘制一个直径为5mm的圆,拉伸距离为3mm和一个直径为3mm的同心圆,拉伸距离为3mm2、曲柄新建零件,名称为qubing-2,拉伸草绘,拉伸距离为33、连杆新建零件,名称liangan-3. 拉伸草绘,只在一边画圆拉伸孔,再在另一边拉伸凸台。
凸台与R2.5同心,高度3。
4、滑块新建零件,名称huakuai-4. 对称拉伸,拉伸长度为10绘制一个直径为3mm的圆,拉伸距离为10二、零件的装配(1)进入装配模式(2)装入基础元件单击工具栏中的【装配】按钮,弹出【打开】对话框,选择“jijia-1”,单击打开按钮,弹出【元件放置】操控面板。
(完整word)用matlab分析曲柄摇杆机构
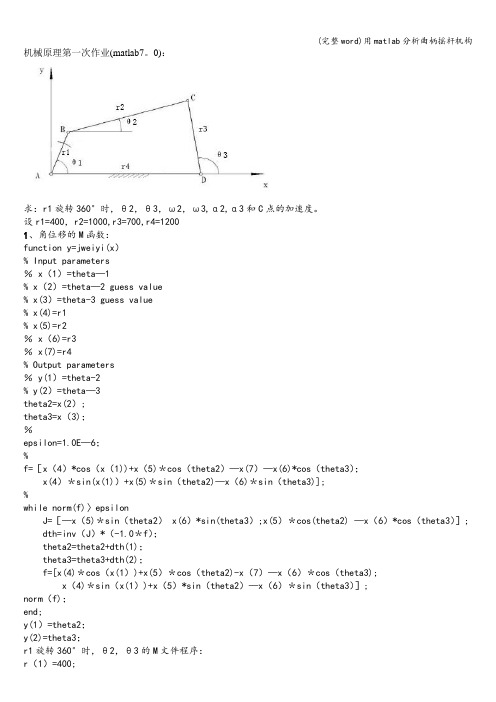
机械原理第一次作业(matlab7。
0):求:r1旋转360°时,θ2,θ3,ω2,ω3,α2,α3和C点的加速度。
设r1=400,r2=1000,r3=700,r4=12001、角位移的M函数:function y=jweiyi(x)% Input parameters% x(1)=theta—1% x(2)=theta—2 guess value% x(3)=theta-3 guess value% x(4)=r1% x(5)=r2% x(6)=r3% x(7)=r4% Output parameters% y(1)=theta-2% y(2)=theta—3theta2=x(2);theta3=x(3);%epsilon=1.0E—6;%f=[x(4)*cos(x(1))+x(5)*cos(theta2)—x(7)—x(6)*cos(theta3);x(4)*sin(x(1))+x(5)*sin(theta2)—x(6)*sin(theta3)];%while norm(f)〉epsilonJ=[—x(5)*sin(theta2) x(6)*sin(theta3);x(5)*cos(theta2) —x(6)*cos(theta3)]; dth=inv(J)*(-1.0*f);theta2=theta2+dth(1);theta3=theta3+dth(2);f=[x(4)*cos(x(1))+x(5)*cos(theta2)-x(7)—x(6)*cos(theta3);x(4)*sin(x(1))+x(5)*sin(theta2)—x(6)*sin(theta3)];norm(f);end;y(1)=theta2;y(2)=theta3;r1旋转360°时,θ2,θ3的M文件程序:r(1)=400;r(2)=1000;r(3)=700;r(4)=1200;dr=pi/180;th(1)=0;th(2)=44。
基于MATLAB曲柄滑块机构的运动学分析
基于MATLAB曲柄滑块机构的运动学分析张欣悦;李连豪;王涛【期刊名称】《农机使用与维修》【年(卷),期】2012(000)004【摘要】MATLAB Motion Simulation is a technology to analysis mechamcal motion parameters oevel- oped with the help of computer technology and MATLAB software technology platform. Formerly thecalcu- late of analytical method based on C language and VB language, their instructs tedious, sentences struc- ture is complex, then MATLAB program language is easier to manipulate. In this paper a slider - crank mechanism as an example, analysed it by means of MATLAB Motion Simulation, Through its visual func- tion tried to express slider- crank mechanismg motion parameters in a picture way.%MATLAB运动仿真技术是借助计算机技术和MATLAB软件技术平台发展起来的一种分析机械运动参数的技术。
以往解析法的计算主要依靠V语言或VB语言,这些语言指令繁琐,语句结构复杂,而MATLAB程序语言简洁更易操作。
因此,本文就是以曲柄滑块机构为例,借助MATLAB运动仿真技术对其进行分析,试图通过其可视化功能将曲柄滑块机构的运动参数用图像的方式表达出来。
基于Matlab的曲柄滑块机构的设计方法
。 8。 ] m 1( -n 一 一 (-) 构原动件 曲柄转角范围 [ =咖。~( +10 ) 划 i ×s( s 咖一 n 耋 盯2 2 i , r r
( z Rs (T )+E 2 L 一( i 1 一 n ) )/ +风 ) )/. 1 2
分 10等 份. 0 () 5
将机 构原 动 件 曲柄转 角 范 围 [ =q b o~( 。+
10 ) 划 分 Ⅳ等 分 , 建立 目标 函数 关 系式 : 8。 ] 则 mi ( n 、= f
mi( 兰日( ) ( ) ) : 1 ( )一 ) ) i ( ( 一 ) 2 n 日 ( ) t
基 于 Malb的 曲柄 滑 块 机 构 的 设计 方 法 t a
何 文德 , 王 充 , 张 丽 , 赖丽莉
( 四川化工职业技术 学院 ,四川 泸州 6 60 ) 4 0 5
摘 要 : 对 现代机 构 复 杂运动 状 态设计要 求 , 针 以机 构 常规设 计 方法 为基础 , 立 曲柄 滑块 机 构 的数 建 学模 型 , 用 Maa 学计算 软件 , 运 tb数 l 进行 优化 设计 .
第1 8卷
第 4期
兰州工业高等专科学 校学 报
J u a fL n h u P ltc ncColg o r lo a z o oye h i n l e e
Vo .1 No 4 1 8 . Au . 01 g2 1
21 0 1年 8月
文 章 编 号 :0 9— 2 9 2 1 )4— 0 5— 3 10 2 6 (0 1 0 0 5 0
动 按 函数 H( )= ×"s 一 ) 出 , , 0 i ( 输 / n t
I l
动设 计要 求 , 高 机 构 设 计 的工 作 效 率 和 改 善 机 提 构 的特 性 . 本文 提 出运 用 Maa 学 计算 软 件 , tb数 l 按 现代 机构 运 动 设 计 要 求 , 立 曲柄 滑 块 机 构 的数 建
第6章 Matlab平面连杆机构的动力学分析
§6-1 曲柄的动力学仿真模块
由运动学知识可推得:
Re i Re A rcii cos i 2 rcii2 cos i s Im i Im A rcii sin i 2 rcii2 sin i s
§6-1 曲柄的动力学仿真模块
1.曲柄的动力学矩阵表达式 曲柄AB复向量的模 ri 为常数、幅角 i 为变量。 质心到转动副A的距离为 rci ,质量为 mi ,绕质心的转动惯量为 Ji , 作用于质心上的外力为 Fxi 和 Fyi 、 外力矩为M i ,曲柄与机架联接, 转动副A的约束反力为 RxA 和 RyA , 驱动力矩为 M 1 。
由理论力学可得:
RxA RxB Fxi mi Re i s
RyA RyB Fyi mi g mi Im i s
M1 M i RxArci sin i RyArci cos i RxB ri rci sin i RyB ri rci cos i J ii
§6-2 RRR II级杆组的动力学仿真模块
2.RRR II级杆组动力学分析M函数
g=9.8; %重力加速度 ri=1; rj=07; %两杆的长度 rci=0.5;rcj=0.35; %质心到铰链B的距离 %质心到铰链D的距离 mi=3; mj=2.2; %两杆的质量 Ji=0.25;Jj=0.09;%两杆的转动惯量 ReddD=0;ImddD=0; Fxi=0;Fyi=0;Mi=O; %i杆的外力和外力矩 a=zeros(6); a(1,1)=1;a(1,3)=1; a(2,2)=1; a(2,4)=1; a(3,1)=rci*sin(x(1)); a(3,2)=-rci*cos(x(1)); a(3,3)=-(ri-rci)*sin(x(1)); a(3,4)=(ri-rci)*cos(x(1)); a(4,3)=-1; a(4,5)=1; a(5,4)=-1; a(5,6)=1; a(6,3)=(rj-rcj)*sin(x(2)); a(6,4)=-(rj-rcj)*cos(x(2)); a(6,5)=rcj*sin(x(2)); a(6,6)=-rcj*cos(x(2));
Matlab在偏置曲柄滑块机构运动分析中的应用
由柄转角奄, I . 图 2 连杆和滑块 的位移 曲线
[i 三+l 。 一。 ] Lc o1 1s [ (o 2 ]on t 缈. I 7 2 2s P s c n  ̄ : ̄ v , , :2 s O ¥  ̄ ! ]
置 曲柄 滑 块 机 构 的滑 块 和连 杆 的运动 特 性进 行
图 1偏置 曲柄滑块机构
以曲柄 固定 铰链 中心 。 为坐 标 原点 ,建立 直 角坐标 系 ,取 封 闭环 OA C B O,矢量 方程 为 :
+, ,= +E ( ) 1
了 分析 ,进而 更加 生动 、清晰 地表 示 出各构 件 的 位移 、速 度和 加速 度 与 曲柄转 角之 间的 关系 , 使
电大 理 工 21 0 2年 6月
SI y f cec n n i eigaR VU td S i e dE gn r t T . l o n a e n
第 2期
总第 2 1 5 期
Mta a lb在偏置 曲柄滑块机构运动分析 中的应用
苗君 明
辽宁装备制造职业技术学院 ( 沈阳 106 ) 11 1
搞
要 偏 置曲柄滑块机构具有急回特性 ,广泛的应 用的机械传动领域 ,以迭到提供 工作效率 的 目
的. 由于滑块 的运动速度 不是 匀速运少振动 冲击奠定理论基础 . 关键词 偏置 曲柄滑块机构 运动分析 MA L B TA
图4 连杆和滑块 的加速度 图
3 结论 通 过构 建 偏 置 曲柄 滑 块机 构 合 理 的 数 学模
型 ,运用 Mal t b语言对 其运 动进 行 分析 ,十 分 a 简 洁地 得 到 了各 个 构件 的运 动 曲线 以及 滑块 的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第26卷第3期 太原科技大学学报 Vo1.26 No.3 2005年9月 JOURNAL OF TAIYUAN UNIVERSITY OF SCIENCE AND TECHNOLOGY Sep.2005
文章编号:1673—2057(2005)03—0172—04 曲柄滑块机构的MATLAB仿真
陈德为 (福州大学机械工程及自动化学院,福州350002)
摘要:研究了基于MATLAB(Simulink)的曲柄滑块机构仿真。内容包括曲柄滑块 机构中连杆的角速度仿真,滑块的位移、速度以及加速度仿真。 关键词:曲柄滑块机构;MATLAB(Simulink)仿真 中图分类号:THI3 文献标识码:A
+一+一+”+”+一+”+一+一+”+一+”+一+一+一+ 曲柄滑块机构是单缸四冲程发动机的关键机 构。对曲柄滑块机构进行运动学仿真意义重大,通 过仿真可以揭示曲柄滑块机构连杆、滑块的运动规 律。文献[1]运用平面曲柄滑块机构函数综合的混 沌方法编写了MATLAB程序,对平面曲柄滑块机构 的函数综合问题进行研究,得出了Jocobi矩阵的通 用表达式,找到了实现最大精确点时该问题的全部 解,为实际的平面曲柄滑块机构的设计提供了多种 选择方案;文献[2]在对饲草压捆机压缩机构进行 动态仿真的同时,研究了压缩机构内部的曲柄滑块 机构;文献[3]应用MATLAB(Simulink)软件对人造 板工业中多层热压机的重要装置之一的杠杆式同 时闭合机构进行了研究,对该机构外框部分以滑块 为主动件的曲柄滑块机构进行了运动学仿真;文献 [4]应用MATLAB对自动售货机的送出机构进行优 化设计。本文以MATLAB和Simulink为研究平台, 在系统地建立曲柄滑块机构数学模型的基础上,进 行了计算机仿真。主要研究曲柄以匀角速度和匀 角加速度旋转两种情况下,曲柄滑块机构中连杆的 旋转角速度的变化规律以及滑块的位移、速度、加 速度的变化规律。仿真结果应用曲线的形式形象 地表达曲柄滑块机构各部位的运动规律。
1 1曲柄滑块机构运动学方程 J
1.1 曲柄滑块机构的机构组成 曲柄滑块机构的向量图如图1所示。曲柄z 的 长度为z (z。=30ram),旋转角位移为0 ,旋转角速 度为 ,旋转角加速度为 ;连杆z 的长度为z (z =120mm),旋转角位移为0 ,旋转角速度为cc, ;滑
块m的位移量为0,速度为f0,加速度为z。。 02
0 图1 曲柄滑块机构的向量图 Fig.1 The vector chart of brace slip block organization 1.2 曲柄滑块机构的速度方程 根据曲柄滑块机构的向量图,把曲柄滑块机构 的向量按x和Y坐标轴方向分解可以得出:
收稿日期:2005-01-09 作者简介:陈德为(1962一),男,副教授,在职博士生,研究领域:机电控制。
维普资讯 http://www.cqvip.com 第26卷第3期 陈德为:曲柄滑块机构的MATLAB仿真 l73 ZlCOS01+2cos02=0 Zl sin0l+2sin02=0 式(1)、(2)对时间求导,并注意到 。: 。 得: Zl l sin0l一2to2sin02=l0 Ii lcosOl+2to2cosO2=0 写成如下矩阵的形式得:
[一/2 s in。0 2 ][ ]=[一 l。I (.o
。I s in
。 l
这就是曲柄滑块机构的速度方程。
(1) (2) 和0,=
(3) (4)
1 (5) J
1.3 曲柄滑块机构的加速度方程 式(3)、(4)对时间再次求导,并注意到:0。= l、0: 2和 l= l、 2= 2得: zl lsin0l—zl6 2lc0s l—z2Ot2sin02+一z26 22
c0s =如
’ (6) flOtlcos0l—fl 6 sin9l+f2 2cosO2+一f26 sin92=0
(7) 写成如下矩阵形式得:
12sin伽02 ㈣=
(1la lsin0 2 _+2 2cosO ](8) 【 zl l l—zl sin l—z2 sin 2 J
这就是曲柄滑块机构的加速度方程。 2‘曲柄滑块机构的匀角速度运动学仿 真 -9]
2.1 匀角速度输入时曲柄滑块机构的Simulink仿 真模型
曲柄连杆机构曲柄以 .=188.5 rad/s作匀角 速度运动(这是除草机单缸发动机的正常工作速 度),主要研究在这一输入作用下的曲柄连杆机构 连杆的运动角速度变化规律以及滑块的位移、速度 的变化规律。应用MATLAB算法建立计算曲柄滑 块机构的速度方程(5)的MATLAB函数模块slip— J 7 blockspeed(该模块in:∞l、0l、02;out:∞2、u t0)。应
U‘ 用该MATLAB Function模块建立了Simulink仿真模
型如图2所示。仿真初始条件:0。:0 rad、0 =0 rad、z0=150 mm(仿真模型符号对应:alphal— .; omegal一( l;omega2一( 2;thetal一0l;theta2—02; 以下同)。
图2 曲柄匀角速运动时Simulink仿真模型 Fig.2 Simulink simulation model of the brace homogeneous angle speed sport 2.2 匀角速度输入时曲柄滑块机构的Simulink仿 真曲线分析
曲柄连杆机构的曲柄以 。=188.5 rad/s作匀 角速度运动时(对应图2的仿真模型),连杆的运动 角速度 (omega_2)的仿真曲线如图3(a)所示。 滑块m的位移仿真曲线如图3(b)所示,速度仿真 曲线如图3(c)所示。
(a) (b) (c) 图3 匀角速度运动时曲柄连杆机构的Simulink仿真曲线 Fig·3 Brace bindiny mechanism simulink simulation curve of the homogeneus angle speed sport
维普资讯 http://www.cqvip.com 174 太原科技大学学报 2005正 从仿真曲线可以看出,当曲柄以 .=188.5 rad/s作匀角速度运动时,连杆的角速度 : 48 rad/s(图3(a)所示);滑块m的位移变化范围是90 mm一150 mm(图3(b)所示);滑块m的速度变化范 围大约是±0.6×10 mm/s(图3(C)所示)。而且 它们在0.07 S内变化了2个周期。 3 曲柄滑块机构的匀角加速度运动学 仿真 3.1 匀角加速度输入时曲柄滑块机构的Simulink 仿真模型 曲柄连杆机构的曲柄以Ot。=8 rad/s。作匀角加 速度运动。研究在这一输入作用下的曲柄连杆机构 连杆的运动角速度变化规律以及滑块的位移、加速 图4 曲柄匀角加速运动时的仿真模型 Fig.4 Simulation model of the brace homogeneous angle acceleration sport l0 5 0 5 1O 度的变化规律。应用图4曲柄匀角加速运动时的仿 真模型MATLAB算法建立计算曲柄滑块机构的加 速度方程(8)的MATLAB函数模块slipblock—acce1. A21 eration(该模块in: l、 I、 2、0l、02;out: 2、
0 )。应用该MATLAB Function模块建立的Simulink
仿真模型如图4所示。仿真初始条件:0.=0,=0 rad、Zo=150 mm、lo=0 mm/s、 l 2=0 rad/s。
3.2匀角加速度输入时曲柄滑块机构Simulink仿 真曲线分析
曲柄连杆机构的曲柄以Ot.=8 rad/s 作匀角加 速度运动时(对应图4的仿真模型),连杆的运动 角速度 :的仿真曲线如图5(n)所示。滑块m 的位移仿真曲线如图5(b)所示,加速度仿真曲线如 图5(c)所示。 从仿真曲线可以看出,当曲柄以Ot.=8 rad/s。(仿真初始条件:0。=0 =0 rad、fn=150 mm、 l= 2=0 rad/s、,0=0 mm/s。)作匀角加速 度运动时,连杆的 :从0开始按图5(n)规律变化 增加,大约4秒时其绝对值达到7 rad/s;滑块m的 位移范围也是90 ini'l1.150 mm,只是位移变化先慢后 快(图5(b)所示);滑块m的加速度按图5(c)的规 律变化增加,大约4秒时其绝对值达到3.6×104 mm/s
(a) (b) (c) 图5 匀角加速运动时曲柄连杆机构的Simulink仿真曲线 Fig.5 Brace bindiny mechanism simulink simulation curve of the homogeneous angle acceleration sport
4利用匀角加速度输入Simulink仿真 模型进行曲柄滑块机构在匀角速度作 用下的仿真 一
应用图4所示的“曲柄匀角加速运动时的仿真 模型”对曲柄滑块机构在匀角速度作用下进行仿
真,需要对图4作一局部调整,令图4中的MATLAB Function模块的第一个输入alphal(Ot.)为0,第二个 输人omegal( .)等于188.5 rad/s,得到如图6所 示的新模型。应用新模型进行仿真,得到仿真曲线 如图7所示,其中图7(a)、图7(b)分别表示匀角速 度运动时曲柄连杆机构连杆的角速度 和滑块位 移Z。的仿真曲线波形,这与图3(b)、图3(n)波形完
维普资讯 http://www.cqvip.com