卫星编队
编队飞行卫星高精度自主相对定轨研究
实 现环绕星相对轨道的 自主确定 , 最后结 合模拟 的轨道数 据和 量测数 据进 行了仿真和分析 , 真结 果表 明定轨精 度 比使用 C 仿 — w 方程提高一个数量级 , 明了这种 导航方案 的有效性 。 说
线, 在许多应用领域体现 出明显 的优 势。
卫星编队飞行相对轨道 自主确定作为实现 队形保持 和控制 的前提 , 是编 队任务必须解决 的关键技术 之一 , 已有学者在此方 面做 了大量的工作 , 主要有利用 G S的半 自主导航方 案 J 以 P , 及基于类 G S P 技术 j 、 于星 间相对位 置 测量 的 自主 导航方 ቤተ መጻሕፍቲ ባይዱ基 J 案 J 。但 是 目前 , 编队 飞行 自主相 对 定轨 中 , 在 对卫 星相 对 运 动的描述 形式 一 般 为 CW 方 程 , 仅 适用 于 中 心星 轨道 为 圆 — 它 形 、 间距远远小于 中心 星轨道半 径且 忽略各种 摄动影 响 的情 星 况 , 以由于模型 的误差 , 所 导致定轨结果不准确 。本研究利用相 对位 置和相对 速度与 轨道 根数差 的关 系 , 根据 文献 [ ] 出 的 7得 相对运动方程解析 表达 式来描述 卫星 编队相 对运动 , 此方 程 可 以方便地 引入摄动影 响 , 适用于 中心卫 星是椭 圆轨道 的编 队 也
●
p ru b t n I trs tl t itn e me s r me t s w l a re tt n me s r me tae c o e so s ra in if r a in a d t e e r a i . ne — ae i d s c a u e n e l s o in ai a u e n r h s n a b e v t n o t o le a a o o m t , n h o r lt e o btsae s i t n i a h e e h o 【 n e tn e a ma l rd sg . u r a i lt n i u tae h t e p e eai r i t ts e t v ma i s c iv d t r u h a x e d d K o g l n f t e in A n mei l smuai l srt st a r — i e c o l h t
基于卫星编队InSAR系统误差源分析
干涉合成孔径雷达 IS R技术是在合成孔径 三角测 量 , 要 两 个 天 线 ( A )在 垂 直 于 雷达 nA 需 A 、 雷达 S R技术 基 础 上 发展 并 逐 渐 成 熟 起来 的 一 平台运动的方 向上分开放 置以形成基线 , A 基线两 种新 的主动 微波 成像 技术 , 一 般 S R功能 的延 端 与地 面被 观测 点 P 构成 三 角 形 。n A 在实 施 是 A IS R 伸和发展。按照其干涉模式可以将其分为用于提 对 三角 形 的求 解 时 , 是从 地 面被 观 测点 P与 两个
【系统仿真学报】_卫星编队_期刊发文热词逐年推荐_20140723
2012年 序号 1 2 3 4 5 6 7 8 9
2012年 科研热词 虚拟现实 编队构型 控制系统 控制总线 基线 卫星 内编队卫星 仿真实验 人机交互 推荐指数 1 1 1 1 1 1 1 1 1
2008年 序号 1 2 3 4 5 6 7 8
科研热词 电离层延迟量 整周模糊度 微型核 双差 仿真 stk软件 dsapce仿真器 can总线通讯
推荐指数 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8
2009年 科研热词 视景仿真 相对精度衰减因子 卫星仿真 单调性 分布式架构 全球卫星导航系统 仿真平台 仿真 推荐指数 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9
科研热词 队形保持 视线测量 无主星编队 循环协同控制 处理器在回路 卫星编队 仿真系统 stk can总线
推荐指数 1 1 4 5 6 7 8 9 10 11 12 13 14 15 16 17
科研热词 编队飞行 轨道根数 绳系卫星编队 碰撞预警 相对运动 残差加权平方和检验法 椭圆参考轨道 极点搜索 数值仿真 故障诊断 广义卡尔曼滤波 平动点轨道 展开/回收 姿态稳定性 变尺度直接逼近算法 卫星编队仿真 χ 2检验法
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
基于GPS/激光雷达的编队卫星相对导航研究
1 空 间 相 对 运 动 学 分 析
如 图 1所 示 ,定 义 主 星 的 当地 水 平 当地 垂 直
( V H 坐标系 oy 原点 0 LL ) xz 在主星的质心 , X y O ,o , , O 分别 指 向 航 天 器 的径 向 、速 度 切 向 、法 向坐 标 Z
空间分布式任务是 2 0世纪 9 0年代后期 ,随着 现代小卫星技术 的迅 速发展 ,而 出现 的一种新 的
线性系统的线性化模 型,而 U F采用粒子滤波 的 K
采样思路 ,通 过仔 细选择 的高斯 随机变 量采样点 最小集合来近似 系统 的估计状 态 ,这些 采样点具 有高斯随机变量 ( 态) 状 的均值 和方差 ,所 以当通 过非线性方程进行演化 后它们 以二 阶精 度近似非 线性 系统状态的验后分布。文中基于 Hl i 方程 ,针 l 对卫星编队飞行相对导航 精度要求利用激 光雷达
中图分类号
GPS La e d rBa e l t e Na ia o o p c c a tF r a o li g / s r Ra a s d Rea v vg t n f r S a e r f o m t n F yn i i i
Ch i u Ru
( ea m n f l t nc adIf m tnE g er g inIst eo P s D pr et e r i n o a o ni e n ,X ' tu f ot t oE c o s nr i n i a n it &T l o m nct n ,X ’ 11 1 hn ) e cm u i i s in70 2 ,C i e ao a a
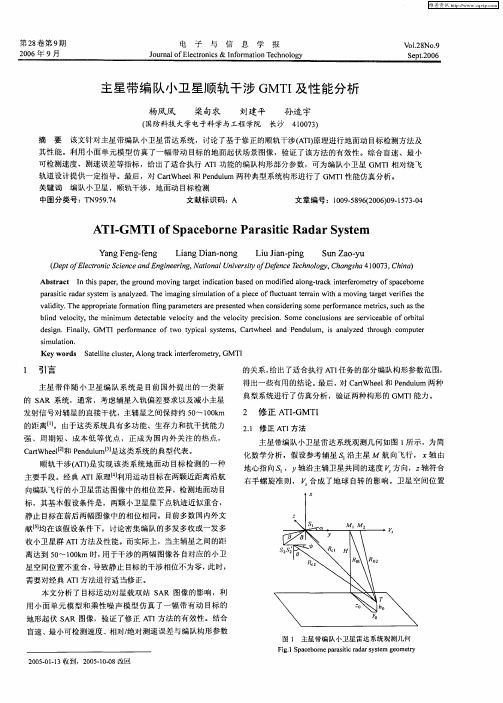
主星带编队小卫星顺轨干涉GMTI及性能分析
ATI GM TIo p c b r ePa a ii d rS se - fS a e o n r stcRa a y t m
Y n e g・ n a gF n ・ e g f L a g Din n n in a ・ o g ・ L u Ja ・ i g i in・ n p S nZ oy u a ・u ・
2 修正 A I T— GMT I
21 修 正 A I 法 、 T方
的距离…。由于这类 系统 具有多功能 、生存力和抗干扰 能力
强 、周期 短、成 本低等优 点,正成 为 国内外关注 的热 点, C r e l】 P n uu 这 类 系 统 的典 型 代 表 。 at e【和 e d lm[是 wh 】
其性能 。利用 小面单元模型仿真 了一幅带动 目标 的地面起伏 场景图像 ,验证 了该方法 的有 效性 。综合盲速 、最 小 可检测速度 、测速误差等指标 ,给 出了适 合执行 A I功能的编队构形部分参数,可 为编 队小卫星 GMT T I相对绕 飞 轨道设 计提供一定指导 。最 后,对 C r e l P n uu 两种典型系统构形进行 了 G I a Wh e 和 e d l t m MT 性能仿真分析 。 关键 词 编队小卫星 ,顺轨干涉 ,地面动 目标检测 文献标识码 :A 文 章编号 :l0 .862 0 )9 17 .4 0 95 9 (0 60 .530 中图分类号:T 5 . N9 97 4
维普资讯
第 2 卷第 9 8 期 20 0 6年 9月 电子与 Nhomakorabea信
息
学
报
、 1 8 . , . No 9 o2 S p.0 6 e t2 0
J u n l f e to is& I f r t nT c n lg o r a o crnc El n o ma i e h o o y o
深空探测中利用静止轨道卫星编队连续导航精度分析

深空 站 只能建立 8小时 通信链 路 , 能连 续 定轨 , 不
如 图 1所 示 。
个 航天 器 同时观测 , 产生 差分 干涉 测量 , 提供天 平 面
1 深 空探测 导航 技术研 究现 状
上 两个 航天 器非 常精确 的相对 角 位置… 。
上 世纪 6 0~7 0年代 , 深空 探 测导 航 系统 主要 采 用 地基 无线 电外 测技术 为巡 航 阶段 的探测 器导航 和 测轨 , 至 用 在 探 测 器 交 会 阶 段 。8 甚 0年 代 以来 ,
术 , 测 站之 间 相 距 2 k , 带 光纤 连 接 的测 站 将 两 1i 宽 n
收到 的信 号用 光纤 传 到 信 号处 理 中心 , 时 导航 精 实
度 达 8 na …。N S 0 rd A A正开 发 同波束 干 涉技 术 , 是 它
在 两个航 天器 非 常接 近 的情 况下 , 们可 以在 地 面 它 天线 的同一波 束 内观 测 , 得 两 个 深 空站 天 线 对两 使
深 空探测 器距 离地球 很远 , 得高 精度 的距 离 、 获
角 度和速 度信 息要 求 时 钟 和 载频 的稳 定性 非 常 高 。 传统 方法 需要 多天 的测 量 数 据作 相 关 处 理 , 能得 才
收 稿 日期 :060.4 修 回 日期 :060—8 20 .41; 20 -62
明 该 天 基 导 航 系统 的 几 何 参 数 精 度 因 子 受 时 间 测量 误 差 均 方 差 和基 线 长 度 变 化 影 响 较 大 。 编 队 的 构 型 对 定 位 精 度 有 很 大 影 响 , 中 基 线 长 度 不 能 过 小 , 间测 量 误 差 均 方 差 不 能 过 大 , 则 定 位 误 差 会 急 剧 增 加 , 随 卫 星 椭 圆 其 时 否 伴 轨道 偏 心 率 也 存 在 一定 界 限 。增 加伴 随卫 星数 量也 有利 于 提 高 系统 的定 位 精 度 。 关 键 词 :深 空 探测 ;连续 导 航 ;静 止轨 道 ;卫 星编 队 ;几 何 参 数 精 度 因子
基于大气阻力的卫星编队构形沿航迹模糊控制方法
o estled ed f ecst er s f e i a r x asdb epr rao top e ,S t -akdi a e f a lt l cyi une edce eo m— j i cue yt e u tna shr Oh i t c r C b h t ei r n l h a s m o as h tb i m e e nr t f n
维普资讯
国 防 科 技 大 学 学 报
第 2 卷 第 3期 9 JU N LO AIN NV RI FD FNET C O0 Y O R A FNTO A U IE S YO EE S E LG L T V 12 o320 o.9N . 7 O
fl w d w t n od e , 6 t n.T e s lt n idc tsta h r tds n e C e c n o e t i 0 ol e i a c t ia d f  ̄ic i o h e r l i a o h i a o n a e h tte d i t c a b o t l w h n 2 m,w t e gv n mu i i fi a n r l i d i h t ie h c n i o .T e meh d p o e f c v ,e e t ep e e c f n t l r r . o d t n h t o rv se e t e v n w h t rs n e o ia r s i i i h i i eo Ke r s fr ain c n g rt n;a o p ee da ; y wo d : m t o u a o o o i f i m t s h r rg c nr l ot o
分布式SAR超分辨成像的卫星编队构形优化设计方法
J — k ・ + k ・ + 忌 ・r y+ 忌 ・r 缸 x () 1
式中
k 、k 、忌 、k 是 加权 系数 ,表示 用 户对分 辨率 和 时间 比例等 4个 因素 的关 心程 度 。J值越 缸
大 , 示 距 离 和 方 位 分 辨 率 越 高 、 足 分 辨 率 要 求 的 时 间 比越 大 。 k k 、 缸取 0 , 示 只 表 满 当 、 k 时 表
2 0 全 国优 秀 博 士 论 文 作 者 专 项 基 金 0 1年 收 稿 日期 :2 0 — 3 3 。收 修 改 稿 日期 :20 — 5 2 050—0 0 50 — 3
时 间 比的各种 情 况 。
优 化 问题 设 计变 量的 选取 : 为成 员 卫星 个数 , 一( , a,0, 为成 员卫 星 i 5个设 5, z) 的 计 变量 ,设 计变 量 的含义 将 在下节 说 明 。 x一( z ,… , 是 决 策 变量 ,一 旦 确定 了 x,也 就 z, z) 是给 出 了一个 编 队构形 的设 计方 案 。 因此 超 分辨 分布 式 S AR编 队构形 优化 设计 可 以抽象 为如 下优 化 问题
维普资讯
中 国 空 间 科 学 技 术
CH I NESE PACE CI S S ENCE AND TECH NOLOGY
20 0 6年 6月
第
3 期
分 布式 S AR超分 辨成像 的 卫 星 编 队构 形 优 化 设 计 方 法
冉 承 其
( 防 科 学 技 术 大 学 信 息 系 统 与 管 理 学 院 ,长 沙 4 0 7 ) 国 10 3
摘 要 编 队构形 设计 是分 布 式卫 星 系统总体 设计 的 关键 问题 ,提 出 了一 种编 队构 形优
InSAR编队卫星全零多普勒姿态导引研究
InSAR编队卫星全零多普勒姿态导引研究槐超;王文妍【摘要】推导一种新的InSAR编队卫星全零多普勒姿态导引方法.由从星多普勒中心频率,给出了偏航角和俯仰角的解析表达式.仿真结果表明:理论上该法在距离向上可使SAR天线中心完全指向零多普勒线.【期刊名称】《上海航天》【年(卷),期】2014(031)006【总页数】5页(P18-21,61)【关键词】InSAR编队;合成孔径雷达;多普勒中心频率;姿态导引【作者】槐超;王文妍【作者单位】上海航天控制技术研究所,上海200233;上海航天控制技术研究所,上海200233【正文语种】中文【中图分类】V448.20 引言SAR卫星的多普勒特性是决定雷达方位向性能的主要因素,直接影响雷达方位向分辨率、PRF的选择。
多普勒中心频率不准确将降低信噪比,增加方位模糊度,出现输出图像位置偏移,影响图像的定位。
在星载SAR中,由于地球曲率及自转的存在,导致多普勒中心偏移,典型的偏移值远高于系统脉冲重复频率[1]。
除采用杂波锁定等直接估计回波信号多普勒中心的方法解决多普勒中心偏移外,还可在数据阶段进行获取处理,偏航导引等导引方法即基于此思路。
通过对卫星合理的姿态导引,降低多普勒中心频率,简化后期图像处理过程。
单星SAR姿态导引角的推导均由卫星发射信号的多普勒历程出发,得出回波信号中回波延迟产生的相位关系,进而推导多普勒中心频率的公式[2]。
此公式是卫星和地面目标相对位置、速度关系的函数,而卫星的相对位置、速度关系则隐含了卫星的姿态角信息。
通过分析公式,找出合理的姿态角,降低多普勒中心频率。
文献[3-4]对降低多普勒中心的导引方式进行了研究,分别提出偏航导引和二维导引方式,并在卫星工程中应用,但此两种方法均未能准确分析全零多普勒产生的原因,因此无法实现理论上的全零多普勒导引,当未来的卫星成像质量的要求越来越高时,其应用可能会受局限。
InSAR编队是由数颗SAR卫星组成的卫星编队系统。
卫星编队飞行中的星间跟踪与测量技术
卫星编队飞行中的星间跟踪与测量技术
马涛;郝云彩;马骏;周胜利
【期刊名称】《控制工程(北京)》
【年(卷),期】2004(000)006
【摘要】本文论述了在卫星编队飞行中的几种用于星间测量的方法,包括导航卫星、微波雷达、激光雷达、红外和可见光相机这几种目前在航天工程应用比较成熟的方法,并粗略分析了各种方法的测量精度及可行性。
【总页数】7页(P28-34)
【作者】马涛;郝云彩;马骏;周胜利
【作者单位】北京控制工程研究所;中国空间技术研究院研究发展部
【正文语种】中文
【中图分类】V412.41
【相关文献】
1.星间测距对小卫星编队相对轨道状态的修正 [J], 张晓磊;郑建华;高东;钱航
2.基于星间测距增强的卫星编队GPS相对导航研究 [J], 张伟;杜耀珂;李东俊;王瞧;金小军;徐兆斌;金仲和
3.微小卫星编队的星间测距系统设计及精度分析 [J], 孙蕊;兰盛昌;徐国栋
4.基于星载双频GPS的长基线卫星编队高精度快速星间相对定位 [J], 涂佳;谷德峰;吴翊;易东云
5.编队飞行卫星的星间跟踪与测量技术综述 [J], 马涛;郝云彩;马骏;周胜利
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、techsat-21计划
AFRL(空军研究实验室)于1998年提出了techsat-21计划旨在开发通过卫
星编队飞行构成分布式雷达的相关技术。为具有探测缓慢移动的车辆的能力,通常的做法是利用窄长天线产生窄波束去照射目标,对于相对于地面高速飞行的近地轨道卫星而言,要求天线的直径要达到几十米甚至数百米才行。分布式雷达可以完成这一任务:每颗卫星发射一种与其它卫星的信号正交的信号,同时接收监测编队中所有卫星所发射信号(包括它自己发出的信号的回波信号),通过对干涉响应分别进行采样,可以提供求解地面移动目标所需的额外信息。目前,该项计划正在如下领域展开基础研究:稀疏孔径信号处理、微推进、编队飞行、协同控制、空间电离层影响和航天器微型机电系统。正在开发的技术集中于轻质量、低成本的微小卫星,特别是对协作编队有重大影响的技术,如精确差分定位、星间距离修正和通信、大容量能源系统、轻质量固态相控阵天线列、微推进、先进电子包、多功能结构和先进热控制。最终计划是进行微小卫星近距离编队飞行试验,用于演示验证分布式卫星系统的技术可行性,分析在空间或从空间完成多种任务的潜在能力。 对于编队飞行技术的研究最早是在美国开始的。早在1995年,美国空军科学研究办公室(Air Force Office of Scientific Research,AFOSR)发起了对分布式小卫星完成空间任务的技术挑战和优势的探索。1997年美国空军实验室(Air Force Research Laboratory,AFRL)明确了分布式小卫星的空间任务,并于1998年提出了techsat-21计划,其目的是为了研究分布式小卫星系统中的各个技术难点,发展空间虚拟卫星技术。techsat-21计划采用空基雷达作为有效载荷,通过实时地提供GMTI(ground moving target indication)和SAR(synthetic aperture radar)数据,进行雷达成像。techsat-21系统曾经有过三套技术方案:方案一采
用当时现有技术,系统由35颗低轨卫星组成,卫星重量估计为12500kg;方案二采用2003-2005年之前的技术。系统仍由35颗卫星组成,但卫星重量预计降为4400kg;方案三则采用虚拟卫星技术,系统由位于7个轨道平面内的35个星群组成,每个星群包括8个卫星。最后,在2001年,美国空军研究实验室确定了以三颗小卫星组成分布式卫星系统的techsat-21飞行试验计划。techsat-21卫星的主要试验任务包括:编队飞行、星座管理、精确测时与授时以及分布式疏散孔径雷达信号处理等。卫星在编队飞行过程中,将进行自治编队飞行试验,三个卫星最初运行在高度为550km的近圆轨道上,相互间隔为5km,在一切正常并保持一段时间之后,这种链式编队的尺度越来越小,直至达到100-500m的范围;之后链式编队将转换为服从Hill方程运动规律的椭圆编队,椭圆相对运动轨道的大小在100-500m左右,保持一段时问以后,椭圆编队逐渐增大,直至达到5km。在编队构形的变化过程中,三颗techsat-21卫星构成一副有效孔径各不相同的虚拟天线,以便全面检验成像效果,整个实验过程大约历时一年。techsat-21计划中三颗卫星中任何一颗都具有收发信号的功能,编队卫星之间有通信链路,可以实现功能互补;任何一颗卫星都能通过星间链路对另外2颗卫星实施控制与管理,当有一颗卫星工作“疲倦”或信号减弱时,另一颗卫星就会自动接替。自从techsat-21计划提出以来,在系统总体、命令控制、编队飞行、GMTI等各个分
系统已取得了不少的成果。但是其技术难度比预想的要大,在编队构形、协同工作、测量精度以及数据处理等方面还面临着一系列的技术挑战,其飞行试验被迫几度推迟。尽管如此,该项目仍堪称国际上航天器编队飞行技术水平最高的代表,极大地促进了编队飞行技术水平的进步。
2、TanDEM-X卫星 德国雷达卫星TanDEM-X由EADS Astrium公司与德国宇航中心(DLR)联合开发。于2010年6月21日早晨6点14分成功送入预定轨道。该卫星是2007年升空的TerraSAR-X的“姊妹”卫星,重1.3吨,飞行高度为514千米。在运行轨道上,两颗卫星将以不到200米的距离同步飞行,精确扫描地球表面。这两颗卫星的工作原理大致相当于人的双眼,在未来3年内将反复扫描整个地球表面,最终绘制出高精度的3D地球数字模型。 卫星简介:德国雷达卫星TanDEM-X由EADS Astrium公司与德国宇航中心
(DLR)联合开发。于2010年6月21日早晨6点14分(格林威治标准时间2点
14分),由俄罗斯洲际弹道导弹(ICBM)改装而成的“第聂伯”RS-20B运载火箭从
拜
科努尔航天中心成功送入预定轨道。该卫星使用创新型雷达干涉仪对地球进行测绘,到2012年将可以提供高精度数字高度模型。TanDEM-X卫星重1350千克,寿命5年,任务期间将对地球表面进行若干次测量。主要任务目标是生成一个连贯的高精度3D地球数字高程模型。 工作方式:TanDEM-X卫星在轨道上与TerraSAR-X卫星协同工作,生成地球大陆块的数字高度模型。通过从相距几千米到相距仅200米的编队飞行,两颗卫星构成一台雷达干涉仪。通过此方法,卫星在未来几年将能够提供前所未有质量的雷达图像。 技术特点:利用一前一后的阵型,两颗卫星仅用三年就可以完成对地球陆地表面的测量。在12米宽的网格上,高度信息的精度小于2米。基于卫星陆地测量的优越之处在于,能生成世界范围、连续的和同类的地形模型,不会因地区或国家边界线而中断,也不会因为测量方法不同提供不同类的模型。这种雷达不受气候和云层限制,可日夜无间断工作。这种测绘方法是独一无二的,它特别引起了美国的兴趣。TanDEM-X是一个关键项目,它可以演示、维护并扩展德国在基于卫星的雷达技术领域的能力和竞争力。到2012年,德国将拥有地球的数字地形模型。这项具吸引力的世界上独一无二的产品除了科学应用,还可以被用于其他项目,如:ZKI(基于卫星的危机信息中心)、GMES(全球环境安全监视)和GEOSS(地球综合观测系统)。
3、GRACE 2002年3月成功发射的美德合作卫星重力计划GRACE(Gravity Recovery And ClimateExperiment),即将提供空间分辨率约为200 km而时间分辨率为1个月
的时变地球重力场模型序列。GRACE计划的星座由两颗相距约220 km,高度保持为300-500 km、倾角保持约90°的近极轨卫星组成。由于采用星载GPS和非保守力加速度计等高精度定轨技术,以及高精度的星一星跟踪数据反演地球重力场,在几百公里和更大空间尺度上, GRACE重力场的精度大大超过此前的卫星重力计划。根据GRACE时变重力场反演的地球系统质量重新分布,将对固体地球物理、海洋物理、气候学以及大地测量等应用有重要的意义。虽然其设计寿命只有5 yr,但研究表明GRACE的结果可用于研究北极冰长期时间尺度的变化,并进而
研究极冰融化对全球气候变化,特别是对海平面长期变化的影响。在季节性时间尺度上,利用GRACE重力场反演的质量重新分布足以揭示平均小于1 cm的地表水变化,或小于1 mbar。的海底压强变化。除了巨大的社会效益和经济效益外,这些变化对了解地球系统的物质循环(主要是水循环)和能量循环有非常重要的意义。介绍GRACE重力场揭示的地球系统质量重新分布,为理解其地球物理应用提供必需的准备;同时针对我国大陆和沿海地区的地球物理应用提出初步的设想。 4、LISA/BBO 从空间环境探测的需求出发,将Drag-free技术的优点与卫星编队的长处相结合,国外提出了Drag-free编队的概念:编队卫星数量超过2颗,且至少一颗卫星为Drag-free卫星。Drag-free卫星包括卫星平台和标准质量块(ProofMass,放置于卫星内部舱体,与外部摄动隔离).卫星在轨运行时标准质量块仅受到内部静电力及热噪声等极微小的干扰,通过DFC系统控制卫星平台跟踪标准质量块,可有效消除大气阻力、地磁干扰、太阳光压以及太阳风等空间干扰对卫星运行轨道和姿态的影响。以Drag-free卫星作为卫星编队的相对测量和控制基准,可以实现卫星编队的高精度高稳定度控制,从而为实现编队卫星间相对状态的高精度确定提供了前提和基础.目前诸多空间科学计划,如以LISA(Laser Interferometer Space Antenna)/BBO(Big Bang Observer)为代表的深空探测任务,
基于Drag-free编队的思想.在上述计划中,卫星平台与标准质量块相对位置的控制精度在百纳米量级,编队卫星间相对状态测量精度优于百皮米量级,相对姿态控制精度在十纳弧度量级,为实现其空间环境探测任务所需的高精度数据获取及后期数据处理奠定了良好基础。国内目前对该项技术的研究尚处于概念研究阶段。 作为深空分布式Drag-free航天器系统的代表,LISA深空编队是ESA-NASA合作的激光干涉仪空间天线任务,如图3所示。由三颗卫星形成三角形编队,测量银河系内致密双星系统、黑洞分裂和吞噬产生的重力波。系统以空间等边三角形形式圆轨道绕太阳运行,相位滞后地球20°。其Y形臂的长度测量精度可以达到40pm,直接决定了望远镜7 nrad指向稳定度要求。该任务中每个飞行器均有2个6自由度标准质量块和一个单自由度铰链(连接标准质量块舱体与望远镜安
装点上)。