动态环境感知的多目标室内路径规划方法
不确定性环境下的路径规划算法设计与研究
不确定性环境下的路径规划算法设计与研究路径规划是人工智能领域一个重要的研究课题。
在不确定性环境下,路径规划算法的设计变得尤为复杂和关键。
本文将探讨不确定性环境下的路径规划算法的设计与研究,并提供一些解决方案和实践经验。
不确定性环境指的是存在随机因素或不可预测因素的环境。
在这样的环境中,传统的确定性路径规划算法往往不能满足需求,因为它们将环境看作是静态且可预测的。
为了使路径规划算法更适应不确定性环境,需要考虑以下几个方面。
首先,算法需要具备对环境变化的感知能力。
这意味着算法需要能够实时获取环境的变化信息,并及时更新路径规划结果。
一种常用的方法是通过传感器来实时采集环境信息,如摄像头、激光雷达等。
通过对环境的感知,算法能够预测环境的变化趋势,从而更好地规划路径。
其次,算法需要具备适应性和鲁棒性。
不确定性环境下的路径规划往往需要应对各种随机波动和意外情况。
为了提高算法的适应性和鲁棒性,可以引入一些自适应和弹性机制。
例如,在路径规划过程中引入动态规划和模糊逻辑方法,使算法能够根据不同的环境和任务要求进行调整和优化。
此外,算法还需要具备决策能力。
在不确定性环境下,路径规划问题通常具有多个目标和多个可能的路径解。
算法需要能够根据优先级和约束条件,选择最优的路径解。
为了实现这一目标,可以借鉴多目标优化和约束满足问题的方法,将路径规划问题转化为一个数学优化问题,并采用相应的算法进行求解。
在实际应用中,不确定性环境下的路径规划算法设计还需要考虑资源利用和效率问题。
在资源有限的情况下,算法需要能够有效利用有限的资源,提高路径规划的效率。
一种常用的方法是通过分布式计算和任务调度来实现。
同时,算法还需要考虑实时性和可行性,以便能够在有限的时间内给出最优路径解。
在实践中,已经有许多路径规划算法应用于不确定性环境下。
例如,蚁群算法、遗传算法、模拟退火算法等启发式搜索算法可以用于解决路径规划问题。
同时,一些机器学习方法,如强化学习和深度学习,也可以应用于路径规划问题。
无人机的路径规划与多目标调度研究

无人机的路径规划与多目标调度研究无人机(Unmanned Aerial Vehicle,简称无人机)作为一种具有广泛应用前景的无人驾驶飞行器,正逐渐成为各个领域的研究热点之一。
路径规划和多目标调度是无人机应用中的重要问题,涉及到无人机飞行的安全性、效率和资源的优化利用。
本文将围绕无人机的路径规划和多目标调度展开研究,探讨如何提高无人机的飞行效能和应用效果。
首先,路径规划是指确定无人机在飞行过程中的最优航线或轨迹,以满足特定的任务需求。
路径规划问题可以分为单目标路径规划和多目标路径规划两类。
在单目标路径规划中,无人机需要根据特定的目标函数,在保证避免碰撞等基本约束条件的前提下,选择最短路径或最佳路径来实现特定任务,如货物投递、监测巡航等。
而在多目标路径规划中,无人机需要同时考虑多个目标,如时间成本、能耗、风险等方面,以达到最优平衡。
路径规划问题的解决方法较多,其中常用的包括启发式搜索算法和优化算法。
启发式搜索算法是一类通过启发式信息指导搜索的算法,如A*算法、Dijkstra算法等。
这些算法通过定义评估函数,根据启发式信息确定搜索顺序,从而寻找最优路径。
优化算法则通过数学建模,将路径规划问题转化为寻找最优解的优化问题,如遗传算法、粒子群算法等。
这些算法通过不断调整参数和解空间的搜索范围,寻找最佳路径方案。
其次,多目标调度是指根据无人机在不同任务之间的优先级和资源约束,合理分配任务以最大程度地提高整体效率。
在多目标调度中,无人机需要根据任务的紧急程度、距离、资源可用性等因素,平衡多个任务之间的关联性与时效性,实现最佳调度安排。
例如,在快递配送领域,无人机的调度需要考虑不同快递点之间的距离和快递量,以及无人机的飞行速度和可携带货物重量,通过优化算法实现最佳配送方案。
多目标调度问题的解决方法主要包括启发式调度算法和智能优化算法。
启发式调度算法通过规则和经验判断确定任务的执行顺序和资源分配,如最早截止时间优先调度算法、最短任务处理时间算法等。
无人机航迹规划算法设计与优化
无人机航迹规划算法设计与优化无人机航迹规划算法是无人机飞行控制中的重要组成部分,它决定了无人机的飞行路径和航迹规划,对于无人机的任务完成和飞行安全至关重要。
本文将介绍无人机航迹规划算法的设计与优化方法,以提高无人机的飞行效率和任务成功率。
一、无人机航迹规划算法设计1. 环境感知与路径选择无人机在飞行过程中需要实时感知周围环境,包括地形、建筑物、障碍物等信息。
根据感知结果,选择合适的航迹路径,避开障碍物,保证飞行安全。
常用的环境感知技术包括传感器、摄像头、激光雷达等,利用这些技术可以获取到周围环境的高精度信息,为航迹规划提供准确的输入数据。
2. 航迹生成与路径规划航迹生成是指根据任务需求和环境限制,生成一条合理的航迹路径。
常用的航迹生成方法有基于路径规划的方法和基于优化的方法。
路径规划方法通过将飞行区域划分为一系列离散的网格,通过搜索算法找到一条最优路径。
优化方法则通过数学模型和优化算法,将航迹规划问题转化为数学优化问题,找到最优的航迹路径。
3. 动态航迹跟踪无人机需要实时跟踪航迹,保持飞行稳定和精确性。
动态航迹跟踪算法将航迹规划与无人机姿态控制相结合,通过调整无人机的姿态和控制输入,使其跟踪目标航迹。
常用的动态航迹跟踪算法包括PID控制、模型预测控制等。
二、无人机航迹规划算法优化1. 多目标优化无人机的航迹规划涉及到多个目标,如最短路径、最低能耗、最小风险等。
优化算法需要综合考虑这些目标,并给出一个平衡的解。
常用的多目标优化算法有遗传算法、蚁群算法等,它们可以通过适应度函数、约束条件等方法,找到一系列满足多个目标的最优解。
2. 仿真与验证为了验证航迹规划算法的效果和正确性,可以利用仿真平台进行仿真和验证。
通过在仿真环境中模拟无人机的飞行过程,评估航迹规划算法的性能和稳定性。
仿真可以减少实际飞行过程中的风险和成本,并提供大量的数据和结果进行分析和优化。
3. 环境适应性无人机航迹规划算法需要适应不同的环境和任务需求。
《仿人机器人NAO的路径规划研究》范文

《仿人机器人NAO的路径规划研究》篇一一、引言近年来,随着科技的发展和社会的进步,仿人机器人的应用日益广泛,尤其在智能化和自主性方面取得了很多重要突破。
在众多领域中,机器人技术已经被用于自动化执行、救援工作、生活助手、服务业等多个领域。
而在这一领域的关键技术之一就是路径规划。
本文以NAO仿人机器人为研究对象,探讨其路径规划的原理、方法和应用。
二、NAO仿人机器人概述NAO是一款由Aldebaran Robotics公司开发的仿人机器人,具有高度自主性和互动性。
其设计灵感来源于人类,能够完成复杂的动作和任务。
NAO拥有多个传感器和执行器,可以感知环境并做出相应的反应。
其独特的外观和强大的功能使其在科研、教育、娱乐等多个领域得到广泛应用。
三、路径规划原理及方法路径规划是机器人自主导航和运动控制的核心技术之一。
在NAO仿人机器人的路径规划中,主要涉及到以下几个方面的原理和方法:1. 环境感知:NAO通过激光雷达、摄像头等传感器获取周围环境的信息,包括障碍物的位置、大小、形状等。
这些信息是路径规划的基础。
2. 路径规划算法:根据环境感知信息,采用合适的路径规划算法来计算从起点到终点的最优路径。
常用的算法包括基于图论的算法、基于采样的算法等。
3. 运动控制:根据计算出的最优路径,通过运动控制算法来控制NAO的运动,使其按照预定的轨迹行驶。
四、NAO仿人机器人的路径规划方法针对NAO仿人机器人的特点,可以采用以下几种路径规划方法:1. 基于全局路径规划:根据环境地图信息,采用全局路径规划算法计算从起点到终点的最优路径。
这种方法适用于已知环境的情况。
2. 基于局部路径规划:当NAO在未知或动态变化的环境中行驶时,可以采用基于局部路径规划的方法。
这种方法通过实时感知环境信息,根据当前位置和目标位置计算局部最优路径。
3. 融合全局和局部的混合路径规划:结合全局和局部路径规划的优点,根据实际情况选择合适的方法进行路径规划。
基于改进DDPG的多AGV路径规划算法
基于改进DDPG的多AGV路径规划算法目录1. 内容综述 (2)1.1 研究背景 (2)1.2 研究目的 (4)1.3 文献综述 (4)1.4 问题提出与论文结构 (6)2. 多智能体系统(MAS)理论基础 (7)2.1 多智能体系统概述 (9)2.2 多智能体通信模型 (10)2.3 多智能体协同任务规划 (11)3. 深度确定性策略梯度算法(DDPG) (13)3.1 DDPG算法简介 (14)3.2 DDPG算法结构 (16)3.3 DDPG算法的训练与参数调整 (17)4. 基于改进DDPG的多AGV路径规划算法 (19)4.1 智能体交互模型设计 (20)4.2 多智能体协同路径规划的优化方法 (22)4.3 基于奖励机制的路径规划评估标准设计 (23)4.4 改进DDPG算法流程 (24)4.5 仿真实验设置与结果分析 (25)4.5.1 仿真环境搭建 (27)4.5.2 仿真数据与指标 (28)4.5.3 仿真对比实验 (29)5. 结论与展望 (31)5.1 主要贡献与创新点 (32)5.2 研究展望 (33)1. 内容综述本文档旨在深入探讨基于改进型深度确定性策略梯度(DDPG)算法的多自主导引车(AGV)路径规划技术。
现代社会对高效物流和自动化仓储的需求日益增长,而AGV在这一领域展现了巨大的潜力和应用价值。
要求增加的全局路径规划效率和实时更新的能力对传统的规划算法提出挑战。
我们研究并构建了一种新型的、结合强化学习技术的路径优化方案,该方案旨在提升调度决策的速度与质量。
改进DDPG算法通过引入先进的Q网络优化技术和动作重复机制,极大地削弱了传统DDPG算法的时序维度依赖,同时加强了对特定场景的适应能力。
在多AGV协同工作的实际情境下,该算法博客摆明了,目标是通过学习目标函数的稳定梯度,在确保安全的前提下,以最短路径完成货物运输,避免无用的转弯和冗余路径,从而提高吞吐量和资源利用率。
动态环境下机器人的路径规划

机器人
90 SERVO & MOTION CONTROL 2016·03 NO.70
表示动态障碍物前一时刻和当前时刻位置 的数组, 表示下一时刻动态障碍物的位置,Φ 表示 到 的映射。并将预测结果带入到PRM路 径规划模型中,p表示机器人当前的位置,s表示
规划的路径,ψ表示p, 和S之间的法则,则有 如下表达形式:ψ:(P, )→S (10)
沈阳建筑大学信息与控制工程学院 刘美菊 李凌燕 郭文博
摘要:针对在动态未知环境下移动机器人的实时路径规划问题,提出了一 种融合支持向量回归机的随机路标图算法。首先采用支持向量回归机算法 来预测动态障碍物的运动轨迹,然后采用随机路标图算法对移动机器人进 行路径规划,最后,与蚁群算法和动态栅格法进行时效性实验对比。实验 结果表明支持向量回归机和随机路标图算法可以有机结合且具有优良的运 行效果,克服了现有算法时效性差的缺点,并且能更准确地预测动态障碍 物的轨迹,能够快速地规划出一条无碰撞的最优路径。
通过实验证明栅格越小,环境信息储存量就
t
j
m
n
(mm2) (m) (m)
a
R
0 22.4133 0.0218 0.0003 0.0050 0.9306
1 120.3743 0.0194 0.0002 0.0263 0.5974
2 15.4970 0.0184 0.0001 0.0035 0.9798
,然后
在高维特征空间中对映射后的训练集进行线性回
归,得到法相量和非线性回归函数:
(7)
(8) 2.2 随机路标图算法(PRM) PRM算法解决路径规划问题时,分为以下两 步进行: Step1:离线学习阶段。该阶段是在自由移动 空间Cfree中随机采集大量的机器人位置点,这些点 构成了节点集Ga,然后把相邻的节点连接起来, 构成边集Ge,这样就完成了机器人建立一张概率 地图G=(Ga,Ge)可供在线查询使用。 Step2:在线查询阶段。把给定起点和终点添 加到离线阶段的地图中,这样在地图中就会找到 一条到达目标的可行路径。
移动机器人的路径规划方法

详细描述
遗传算法是一种基于生物进化原理的优化算法,通过 模拟进化的过程来寻找最优解。在移动机器人的路径 规划中,遗传算法可以用于在给定起点和终点之间寻 找最优路径,它通过模拟进化的过程不断优化路径, 以获得最优的路径。
06
实时路径规划方法
基于预测的路径规划
预测模型
这种方法依赖于对环境的预测模 型,通过预测模型来预测未来环 境状态,从而规划出一条安全的
路径规划的分类
基于全局信息的路径规划
利用全局环境信息,建立环境模型,并根据模型进行路径规ຫໍສະໝຸດ 划。基于局部信息的路径规划
仅利用移动机器人的局部感知信息进行路径规划,不需要建 立环境模型。
路径规划的基本问题
安全性
路径规划必须保证机器人在运 动过程中不会遇到障碍物或危
险。
高效性
路径规划需要寻找一条最短或 最优的路径,以减少机器人的 运动时间和能量消耗。
能量限制
许多移动机器人都有能量限制,需要 在路径规划中考虑能源消耗。
安全性和鲁棒性
在复杂和危险的环境中,路径规划需 要确保机器人的安全和鲁棒性。
未来发展趋势
深度学习与强化学习
多机器人协同
随着深度学习和强化学习技术的发展,未 来移动机器人的路径规划方法将更加智能 化和自适应。
未来移动机器人将越来越倾向于多机器人 协同工作,路径规划方法需要发展出能够 处理多机器人协同的算法。
导移动机器人进行路径调整。
局部优化
通过不断反馈和局部优化,使得 移动机器人能够根据实时环境信
息做出最优的路径选择。
环境适应性
能够适应环境的变化,并做出实 时的响应。
基于学习的路径规划
强化学习
基于学习的路径规划方法 利用强化学习算法,让移 动机器人能够在环境中自 我学习和优化。
移动机器人路径规划算法设计与优化
移动机器人路径规划算法设计与优化移动机器人在现代工业生产和服务领域中的应用越来越广泛。
为了使机器人能够在复杂的环境中高效地完成任务,路径规划算法的设计和优化变得尤为重要。
本文将介绍移动机器人路径规划算法的设计原理和优化方法,并探讨其在实际应用中的挑战和发展趋势。
一、移动机器人路径规划算法的设计原理1. 探索算法探索算法是移动机器人路径规划中常用的一种方法。
其基本原理是根据机器人对环境的感知信息,采用搜索算法来不断地探索未知领域,直到发现目标位置或者到达指定的探索深度。
常见的探索算法包括深度优先搜索、广度优先搜索和A*算法等。
2. 基于规则的算法基于规则的算法主要是根据机器人对环境中障碍物、地形和任务需求等的认知,制定一系列路径规划规则,从而指导机器人的移动。
这种算法适用于环境相对简单且规则性较强的情况。
3. 基于图搜索的算法基于图搜索的算法将环境建模为一个图,机器人的移动过程可以看作是在该图上的一系列节点的遍历。
通过在图上进行搜索和优化,机器人可以找到最优的路径。
常见的图搜索算法有Dijkstra 算法、Bellman-Ford算法和A*算法等。
二、移动机器人路径规划算法的优化方法1. 启发式搜索优化启发式搜索算法通过引入启发函数,提供更准确的路径评估和优化策略的选择。
通过合理设计启发函数,可以在保证搜索效率的同时,更快速地找到最优路径。
A*算法是一种常用的启发式搜索算法,通过估计目标位置和起点之间的代价函数,从而实现路径规划的优化。
2. 动态路径规划优化在移动机器人的实际应用中,环境和任务需求会随时间发生变化,因此需要实时进行路径规划的优化。
动态路径规划优化算法可以根据实时的环境信息和机器人的状态,及时修正原有的路径规划方案,以适应变化的环境需求。
常见的动态路径规划优化方法有遗传算法和模拟退火算法等。
3. 分布式路径规划优化当多台移动机器人同时进行路径规划时,为了提高整体系统效率,需要考虑分布式路径规划优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:0258-2724(2019)03-0611-09 DOI: 10.3969/j.issn.0258-2724.20180098动态环境感知的多目标室内路径规划方法周 艳 1,2,陈 红 1,张叶廷 3,黄悦莹 1,张鹏程 4,杨卫军 4(1. 电子科技大学资源与环境学院,四川 成都 611731;2. 电子科技大学大数据研究中心,四川 成都 611731;3. 武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉 430072;4. 广州市城市规划勘测设计研究院,广东 广州510060)
摘 要:为了满足复杂室内环境中用户的多目标导航需求,提出了动态环境感知的多目标室内路径规划方法. 该方法顾及室内路径复杂度、拥挤程度与阻断事件等多维室内环境语义,扩展了节点-边表示的室内导航路网模型,通过量化表征多维室内环境语义,建立了能够综合感知室内环境语义变化的导航通行成本函数,然后,将顾及室内动态环境语义的导航通行成本函数值作为室内导航路网模型的边长,设计实现了基于Dijkstra的多目标室内路径规划算法. 通过模拟实验分析比较室内路径规划结果,实验结果表明:由于扩展后的室内导航路网模型增加了具有方向性语义的垂直组件,考虑了阻断事件因素,导航路径规划能够避开不可用连接边;在路径拥挤程度分别为轻度、缓慢和堵塞情况下,由于考虑了路径复杂度和拥挤程度,节约的通行时间平均提升了17%.关键词:环境语义感知;路径规划;Dijkstra算法;室内导航中图分类号:V221.3 文献标志码:A
Multi-objective Indoor Path Planning Method with DynamicEnvironment Awareness
ZHOU Yan1,2, CHEN Hong1, ZHANG Yeting3, HUANG Yueying1, ZHANG Pengcheng4, YANG Weijun4
(1. School of Resources and Environment,University of Electronic Science and Technology of China,Chengdu 611731,China; 2. Big Data Research Center,University of Electronic Science and Technology of China,Chengdu 611731,China;3. State Key Laboratory of Information Engineering in Surveying Mapping and Remote Sensing,Wuhan University,Wuhan430072,China; 4. Guangzhou Urban Planning & Design Survey Research Institute,Guangzhou 510060,China)
Abstract: A dynamic environment-aware multi-objective indoor path planning method is proposed,aimed atsatisfying the multi-objective navigation requirements of users in complex indoor environments. Multi-dimensional indoor environment semantics such as indoor path complexity,the degree of congestion,andblocking events were take into account. The node-edge representation indoor navigation network model was alsoexpanded,and a navigation traffic cost function was established by precisely quantifying the multi-dimensionalindoor environment semantics. The value of the navigation traffic cost function was then taken as the side lengthof the model,and a multi-objective indoor path planning algorithm based on Dijkstra was designed andimplemented. The results of the simulation show that navigation path planning can avoid unavailable connectionedges by adding the vertical components with directional semantics and considering the blocking events factor inthe extended indoor navigation network model. After the path complexity and traffic congestion were considered,the travel time is saved by an average of 17% in three traffic patterns, i.e., light,mild and heavy congestion.
Key words: environmental semantic awareness; path planning; Dijkstra algorithm; indoor navigation
收稿日期:2018-03-06 修回日期:2018-04-27 网络首发日期:2018-07-08基金项目:国家重点研发计划资助项目(2018YFB0505501,2016YFB0502303);国家自然科学基金资助项目(41871321,41471332,41571392);中央高校基本科研业务费专项资金资助项目(ZYGX2015J113)
作者简介:周艳(1976—),女,副教授,博士,研究方向为地理信息系统和空间大数据分析,E-mail:zhouyan_gis@uestc.edu.cn引文格式:周艳,陈红,张叶廷,等. 动态环境感知的多目标室内路径规划方法[J]. 西南交通大学学报,2019,54(3): 611-618,632.ZHOU Yan, CHEN Hong, ZHANG Yeting, et al. Multi-objective indoor path planning method with dynamic environmentawareness[J]. Journal of Southwest Jiaotong University, 2019, 54(3): 611-618, 632.
第 54 卷 第 3 期西 南 交 通 大 学 学 报Vol. 54 No. 3
2019 年 6 月JOURNAL OF SOUTHWEST JIAOTONG UNIVERSITYJun. 2019室内路径规划主要应用于室内导航[1-3]和应急疏散[4-5]等领域. 近年来,随着人们对复杂室内环境导航需求的日益增长,Google地图、必应地图、百度地图等众多知名地图服务供应商都已将室内导航作为地图服务的必备功能之一.相关研究为室内导航提供了不同的路径规划思路,主要可分为:基于三维模型语义信息[6-7]、增强用户语义信息[8–9]和顾及上下文信息的3类室内路径规划方法[10-11]. 这些方法的优点是在规划室内路径时,不同程度上考虑了影响导航的语义信息,提高了路径规划的实用性. 第1类方法重点考虑了室内三维模型的几何语义信息;第2类方法将用户信息及其行为语义纳入导航路径规划中;第3类方法考虑了环境上下文和用户偏好语义,提供了以用户为中心的个性化路径规划服务. 上述方法的不足之处在于:现有的室内路径规划方法主要是针对单一目标的路径规划问题设计的(解决两点之间的室内路径规划),而在现实生活中,用户往往具有面向多目标的室内路径规划需求;此外,实际寻径过程中的环境语义是动态变化的,现有方法在路径规划时往往将语义信息作为静态约束条件,难以适应导航环境的动态变化.为此,本文提出动态环境感知的多目标室内路径规划方法,考虑到室内动态环境信息是影响室内路径规划合理性与有效性的重要决定因素,将室内路径复杂度、拥挤程度与阻断事件等室内多维动态环境语义建模并量化,统一整合到室内导航路网模型中,基于Dijkstra算法设计了顾及室内动态环境变化的室内路径规划方法,以满足用户个性化的多目标室内导航需求.
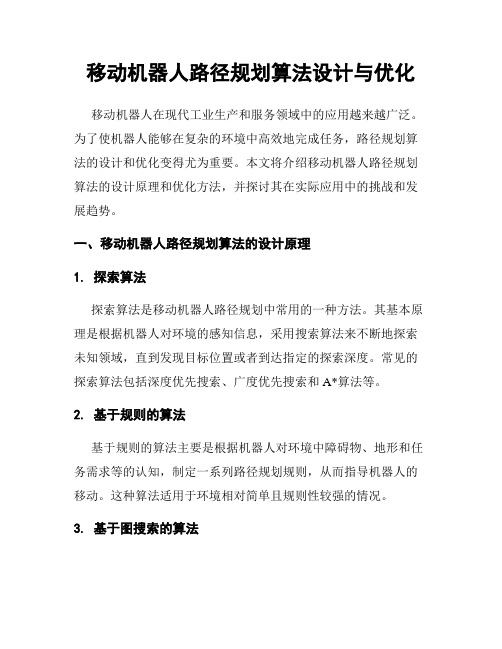
1 顾及环境语义的室内导航路网模型室内导航路网模型是实现室内路径规划和导航服务的基础[12]. 目前的室内导航路网模型以几何图
模型应用最为广泛,这类模型可同时描述室内空间的几何特征和拓扑特征,建模的方式主要有对偶图模型[13]和门-门模型[14]两种. 本文提出顾及环境语义的室内导航路网模型,扩展节点-边表示的室内导航图模型,将室内路径复杂度、拥挤程度与阻断事件等动态环境语义建模并量化,统一整合到室内导航路网模型中,为实现动态环境感知的多目标室内路径规划提供导航路网模型支持.1.1 室内导航路网模型扩展基于图模型的基本思想,室内导航空间可以抽象为节点-边表达的几何模型. 其中,房间和门抽象为几何中心,表示为节点,走廊以中心线的形式抽象表达为边;节点与节点、节点与边(即房间-门、门-走廊)之间根据实际路径的连通性,建立节点-边之间的连接,实现室内导航路径连通,依此形成节点-边表示的室内导航路网模型. 为了满足用户个性化导航需求,本文对节点-边表示的室内导航路网模型进行了扩展,如图1所示.
室内三维模型
节点边房间门垂直组件其他节点走廊垂直边房间内连接边
单门多门电梯扶梯楼梯附加节点拐弯节点邻接关联
邻接关联
邻接关联关联
图 1 扩展的室内导航路网模型Fig. 1 Enhanced indoor navigation road network model
(1) 增加了影响用户室内路径选择的垂直组件,用于表达三维空间垂直方向上的可达路径. 垂直组件划分为电梯、扶梯、楼梯3类,以便于结合用户偏好(如残疾人轮椅更适宜选择电梯等)合理规划室内导航路径,满足用户个性化室内导航需求. 垂直组件在各楼层的出口表示为节点,垂直方向的连通性由垂直节点之间的连接边表示;