基于神经网络的移动机器人对路径形式的识别与分类(精)
基于LM-BP神经网络的采摘机器人语音智能识别系统

基于LM-BP神经网络的采摘机器人语音智能识别系统李江岱7,段云涛2,胡四平(1•河南工业职业技术学院,河南南阳473000;2.南阳理工学院软件学院,河南南阳473000;3.湖北科技学院计算机科学与技术学院,湖北咸宁437100;4.武汉理工大学自动化学院,武汉430070)摘要:随着现代机器人技术的发展,采摘作业机器人也有了很大的进步,自主作业能力有了大幅度提升。
各种智能化、自动化的采摘机器人被应用到果实采摘作业过程中,改变了手工采摘作业的生产发生,极大地提高了作业效率。
采摘机器人自主作业过程中,由于受到作业环境的影响,还需要对机器人进行实时监测和远程控制,以保证采摘作业的顺利进行。
为此,将语音智能识别系统引入到了采摘机器人远程控制系统的设计上,通过语音识别,采摘机器人可以快速执行动作指令,从而避免环境影响造成的采摘作业质量下降,或者发生碰撞事故的突发状况,提高了机器人对环境的适应能力。
关键词:采摘机器人;BP神经网络;语音识别;智能控制;前馈系统中图分类号:S225;TP183文献标识码:A 0引言随着现代人工智能技术的不断发展,语音识别被应用在各种智能机器人自动控制系统中。
多声学建模和多语言建模是现代化语音识别算法中重要的组成部分,具有代表性的是隐马尔可夫模型。
对于语音识别系统,为了实现语音信号的识别,一般是从语音信号各帧中提取声学特征,再设计参考模板,对每一条语音信息对应的声学特征,设计一条机器人应该执行的指令。
在机器人自主化作业时,机器人采集得到声学信号后只需要和模板中的信号进行对比,便可以识别应当执行的动作,从而有效提高了机器人远程控制的效率。
1基于智能化算法的语音识别系统语音识别系统是智能化控制系统上常用的一种识别方式,特别是在机器人作业时,由于机器人受编程控制而进行自主作业,因此环境对作业效果的影响较大。
机器人作业时需要进行实时监测,当机器人作业产生较大的波动时应当及时地校正机器人的错误操作;而远程语音指令能够使机器人迅速地执行相关动文章编号:1003-188X(2021)09-0215-04作,也是最简单最有效的控制自动化机器人的一种方式,其控制流程如图1所示。
基于神经网络的移动机器人路径规划算法的仿真

基于神经网络的移动机器人路径规划算法的仿真
陈华志;谢存禧;曾德怀
【期刊名称】《华南理工大学学报(自然科学版)》
【年(卷),期】2003(031)006
【摘要】研究一种基于神经网络的移动机器人路径规划算法,充分利用神经网络的融合性和并行性提高移动机器人路径规划算法的运算速度.此算法也可以解决机器人的全局路径规划和局部路径规划问题.仿真结果表明这种算法可以快速可行地实现无碰撞优化路径规划,并且对动态环境具有较好的适应性.
【总页数】4页(P56-59)
【作者】陈华志;谢存禧;曾德怀
【作者单位】华南理工大学,机械工程学院,广东,广州,510640;华南理工大学,机械工程学院,广东,广州,510640;华南理工大学,机械工程学院,广东,广州,510640
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于神经网络和遗传算法的移动机器人路径规划 [J], 刘玲;王耀南;况菲;张辉
2.基于神经网络和粒子群算法的移动机器人路径规划 [J], 姜明洋;胡玉兰
3.基于神经网络和粒子群优化算法的移动机器人动态避障路径规划 [J], 陈少斌;蒋静坪
4.基于神经网络和遗传算法的移动机器人路径规划 [J], 徐美清;刘洞波
5.基于神经网络和遗传算法的移动机器人路径规划 [J], 徐美清;刘洞波
因版权原因,仅展示原文概要,查看原文内容请购买。
移动机器人运动路径规划方法应用

移动机器人运动路径规划方法的应用[摘要]路径规划是移动机器人学的一个重要研究领域,不论是哪种类别的移动机器人,它们在进行工作时,往往要求根据某一准则,在工作空间中沿一条最优(或次优)的路径行走。
本文据此简述了全局路径规划方法和局部路径规划方法,并针对移动机器人运动路径规划方法及其应用等问题展开探究。
[关键词]移动机器人运动路径规划方法应用探究中图分类号:tp242 文献标识码:a 文章编号:1009-914x(2013)07-0215-01移动机器人路径规划方法可分为全局规划和局部规划两种。
全局规划是在机器人工作环境内的信息已知情况下,对移动机器人轨迹进行路径规划是一项有着广阔应用前景的高新技术,从工业制造领域到军事侦察、核工业、航空航天、服务业、医疗器械、基因工程等诸多领域,移动机器人技术都大有发展空间。
路径规划问题是移动机器人研究中一个最基本最关键的课题,它解决移动机器人如何在环境中行走的问题。
路径规划在机器人研究中不是独立的,同时还涉及到机器人领域的其它方面,如机器人的感知、通信及协调协作机制等,因此机器人越来越受到人们的亲赖,使机器人有了更广大的发展空间,人类探索的深度和广度也因此不断提高。
本文针对移动机器人路径规划方法及其应用等问题展开探究。
一、常见移动机器人运动路径规划方法根据对环境信息掌握的程度将其分为两种:基于环境先验完全信息的全局路径规划,又称静态或离线规划;基于传感器信息的局部路径规划,又称动态或在线路径规划。
(一)全局路径规划其主要方法有:1.可视图法。
2.拓扑法。
3.栅格法。
4.自由空间。
5.最优控制法。
6.神经网络法。
(二)局部路径规划其主要方法有:1.传统方法1)人工势场法。
2)模糊逻辑算法。
3)模拟退火算法。
2.智能仿生算法1)神经网络法。
2)遗传算法。
3)蚁群算法。
4)粒子群算法。
3.启发式搜索方法。
4.基于滚动窗口的算法。
5.基于行为的路径规划算法。
6.基于再励学习的路径规划算法。
基于深度Q网络的移动机器人路径规划算法研究

深度Q网络(Deep Q-Network,DQN)是一种基于神经网络的强化学习算法,具有快速学习和自适 应能力,已在游戏、自动驾驶等领域得到广泛应用。
研究现状与问题
03
移动机器人路径规划算法
基于栅格地图的路径规划算法
栅格地图
将环境表示为栅格形式,每个栅格具有相同的尺寸和属性。
Dijkstra算法
使用Dijkstra算法计算从起点到目标点的最短路径。
A*算法
使用A*算法计算从起点到目标点的最短路径,并使用启发式函数 指导搜索方向。
基于自由空间分割的路径规划算法
《基于深度q网络的移动机 器人路径规划算法研究》
2023-10-29
contents
目录
• 引言 • 深度q网络算法原理 • 移动机器人路径规划算法 • 基于深度q网络的移动机器人路径规划 • 总结与展望
01
引言
研究背景与意义
移动机器人在现代生产生活中的应用越来越广泛,如服务机器人、工业机器人、特种机器人等,路 径规划是实现移动机器人自主运动的关键技术之一。
结果比较与讨论
• 与其他算法比较:我们比较了基于深度q网络的移动机器人路径规划算法与传统的A*算法和随机搜索算法。结果显示, 基于深度q网络的移动机器人路径规划算法在找到最优解的时间和路径长度方面都显著优于其他两种算法。
05
总结与展望
研究成果与贡献
1
提出了一种基于深度Q网络的移动机器人路径 规划算法,实现了对复杂环境的有效适应和路 径规划。
强化学习基本概念
强化学习定义
移动机器人路径识别与跟踪的计算机仿真_丁承君
3
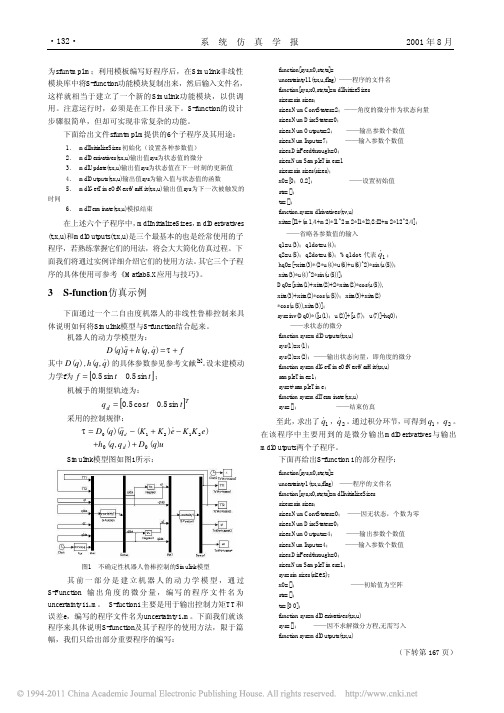
S-function 仿真示例
下面通过一个二自由度机器人的非线性鲁棒控制来具
体说明如何将Simulink模型与S-function结合起来。 机器人的动力学模型为:
&& + h(q, q &) = τ + f D ( q )q & ) 的具体参数参见参考文献[3]。 其中 D ( q) , h(q, q 设未建模动
Simulation of Mobile Robot’s Road Recognition and Road Following
DING Cheng-jun, ZHANG Ming-lu, ZHANG Ai-jun
(Mechanical Institute of Hebei University of Technology, Tianjin 300130, China)
收稿日期: 2001-04-29 基金项目 :天津市自然科学基金资助项目(编号: 003601211); 河北省功 关计划(编号: 0054700D-18); 河北工业大学青年科学基金资助项目 作者简介:丁承君 (1973-), 男, 硕士, 河北馆陶人, 主要研究方向:位移 动机器人及其智能控制,计算机测量与控制;张明路 (1964-), 河北邢台 人, 院长、博导, 主要研究方向为机器人及其智能控制等。
&1 ; q2=u(5);q2dot=u(6);%q1dot 代表 q
hq0=[-xita(3)*(2*u(4)*u(6)+u(6)^2)*sin(u(5)); xita(3)*u(4)^2*sin(u(5))]; Dq0=[xita(1)+xita(2)+2*xita(2)*cos(u(5)), xita(3)+xita(2)*cos(u(5));xita(3)+xita(2) *cos(u(5)),xita(3)]; sys=inv(Dq0)*([u(1);u(2)]+[u(7);u(7)]-hq0); ——求状态的微分 function sys=mdlOutputs(t,x,u) sys(1)=x(1); sys(2)=x(2);——输出状态向量,即角度的微分 function sys=mdlGetTimeOfNextVarHit(t,x,u) sampleTime=1; sys=t+sampleTime; function sys=mdlTerminate(t,x,u) sys=[]; ——结束仿真
基于多传感器信息融合的移动机器人路径跟踪(模式识别与智能系统专业优秀论..

研究生签名: 日 期:
导师签名: 日 期:
基于RBF神经网络的轮式移动机器人轨迹跟踪控制
燕 徐 云 龙 ,
(.金 陵科 技 学 院 信 息技 术 学院 ,江 苏 南京 2 16 ; 2 1 11 9 .南京理 工 大 学 自动化 学院 ,江 苏 南京 2 0 9 ) 10 4
摘 要 : 对 一类 非完整 移动机 器人 的轨 迹跟 踪控 制 系统 , 出一种 基 于 R F神 经 网络 的滑模 控制 与转 矩控 制相 结合 的智 针 提 B
c mb n t n o l i g mo ec n r l n r u o t l a e n RBF n u a ewo k d c n r 1 Co sd r g b t i e t n y a o i ai f i n - d o to dt q e c n r s d o o sd a o o b e rl t r e o t . n o n i e i oh k n mai a dd n — n c m ia d l t eRBF n u a e o k a n t ep o e so mo i b t o in, a d c n t u e r u o to lrc mb n d wi e cl mo e , h e l t r sl r r c s f b l r o t r nw e h eo m o n o si t sat q ec n l o i e t t t o r e h h s e d er r T e n f r y u t t l s m p o i tb l y o t eco e o ro se c rb b an d Th tb l y o e t ec o e p e ro . h i ml l ma ey a y t t s i t f l s d l p e r rs t m al eo t i e . u o i c a i h o y e s i t f n i l s d a i r l o y tm r v db y p n v s b l y t e r . Th i l t n r s l e n tae t a i c n o tae y h sg o b sn s . o p s se i p o e y L a u o t i t o s a i h y esmu ai u t d mo sr t t s o t l r tg a o dr u t e s o e s h t r s h o
移动机器人路径规划算法综述
移动机器人路径规划算法综述一、本文概述随着科技的飞速发展和的广泛应用,移动机器人在工业、医疗、军事、服务等领域扮演着越来越重要的角色。
移动机器人的路径规划问题,即如何在复杂多变的环境中为机器人找到一条从起始点到目标点的最优或次优路径,已成为机器人技术中的核心问题之一。
本文旨在对移动机器人的路径规划算法进行全面、深入的综述,以期为相关研究者提供有价值的参考和启示。
本文将首先介绍移动机器人路径规划的基本概念和分类,包括全局路径规划和局部路径规划、已知环境路径规划和未知环境路径规划等。
接着,我们将重点介绍和分析几种主流的路径规划算法,如基于搜索的算法(如A*算法、Dijkstra算法等)、基于采样的算法(如快速随机树RRT算法、概率路线图PRM算法等)、基于优化的算法(如人工势场法、遗传算法等)以及基于学习的算法(如深度强化学习、神经网络等)。
这些算法各有优缺点,适用于不同的场景和需求。
本文还将讨论路径规划算法在实际应用中面临的挑战,如动态环境、障碍物、计算复杂度等问题,并探讨未来路径规划算法的发展趋势和方向。
我们希望通过本文的综述,能够帮助读者更深入地理解移动机器人路径规划算法的原理和应用,并为推动该领域的发展做出一定的贡献。
二、路径规划问题的分类路径规划问题是移动机器人研究领域中的一个核心问题,它涉及到如何使机器人在复杂的环境中安全、有效地找到从起始点到目标点的路径。
根据不同的分类标准,路径规划问题可以分为多种类型。
根据环境信息的已知程度,路径规划问题可以分为全局路径规划和局部路径规划。
全局路径规划是在环境信息完全已知的情况下进行的,通常需要预先建立环境模型,然后利用搜索算法、优化算法等寻找最优或次优路径。
而局部路径规划则是在环境信息部分已知或完全未知的情况下进行的,机器人需要依靠传感器实时感知环境,并在线进行路径规划和调整。
根据路径规划的策略,可以分为静态路径规划和动态路径规划。
静态路径规划是在静态环境中进行的,即环境中没有动态障碍物或变化因素。
移动机器人路径规划算法
遗传算法可以处理高维空间优化问题,并 且具有较好的鲁棒性。
遗传算法的收敛速度较慢,并且不一定能 够获得全局最优解。
模拟退火算法
算法原理
应用场景
优点
缺点
模拟退火算法是一种基于统计学的随机优 化算法,它在每个迭代步骤中以一定的概 率接受一个劣解,以避免陷入局部最优解 。
模拟退火算法适用于解决大规模、复杂、 连续优化问题,例如在移动机器人的路径 规划中,可以用于解决具有连续状态空间 的优化问题。
基于机器学习和强化学习的混合方法
这种方法结合了基于机器学习和强化学习的优点,以 在环境的实时感知和自我学习之间找到平衡。
06 移动机器人路径规划算法 比较与评估
不同算法的性能比较
基于搜索的算法
包括A*、Dijkstra等,通过构建和搜索地图上的节点,寻找从起点到目标点的最短路径。这类算法适用于较小规模地图,但在大规模地图上搜索效率较低。
VS
详细描述
Dijkstra搜索算法通过构建一个最小堆来 存储待扩展的节点,每次从堆中取出距离 起点最近的节点进行扩展,直到找到目标 节点或者堆为空。该算法适用于带权有向 图的路径规划问题,能够在较短的时间内 找到最短路径。但是,Dijkstra搜索算法 无法处理存在负权边的图。
03 基于采样的路径规划算法
评估指标与方法
评估指标
包括路径长度、路径规划时间、安全性、鲁棒性等。根据应用场景和任务的不 同,选择合适的评估指标。
评估方法
可以采用仿真实验、实际场地实验以及比较不同算法的性能。通过对不同指标 进行量化评估,可以对算法进行全面的比较和分析。
实际应用案例展示
案例一
在工厂环境中,移动机器人需要从起点到目标点运输货物 。采用基于搜索的算法,规划出最短路径,并成功完成任 务。
基于神经网络的智能移动机器人系统设计
基于神经网络的智能移动机器人系统设计随着科技的不断发展,智能机器人越来越成为现实生活中的一部分。
移动机器人是其中颇受关注的一种,因为它有着广泛的应用,比如在医疗、教育、娱乐等领域。
为了实现高效、智能、安全的移动机器人系统,近年来,基于神经网络的智能移动机器人系统设计成为了研究的热点。
一、神经网络基础知识神经网络是一种类似人类神经系统的信息处理模型,模拟了生物神经网络的结构和功能。
它具备了自适应性、学习能力、容错性等特点,能够有效地解决复杂的非线性问题。
神经网络的基本组成单元是神经元,每个神经元接收来自其他神经元的信号,并按照一定规则对信号进行处理,最终输出一个结果。
神经元之间通过突触相连。
神经网络的学习有监督学习和无监督学习两种。
有监督学习需要事先提供样本数据和相应的输出结果,神经网络通过对样本数据的学习和训练来得到模型,从而预测未知数据的输出结果。
无监督学习则不需要提供输出结果,神经网络通过对输入数据的分析和处理来得到模型。
二、智能移动机器人系统设计基本流程智能移动机器人系统设计的基本流程包括需求分析、系统架构设计、软件设计、硬件设计、系统测试等环节。
其中,神经网络主要应用于软件设计和系统测试两个环节。
软件设计中,神经网络用于实现机器人的自主导航、障碍物避免、路径规划等功能。
在神经网络设计阶段,需要确定输入层、中间隐藏层和输出层的神经元数量和神经元之间的连接方式,以及采用何种训练算法。
常用的训练算法包括反向传播算法和遗传算法等。
系统测试中,用于测试的数据量较大,而神经网络的训练需要大量的数据和时间。
因此,增量学习策略成为了智能移动机器人系统测试的常见方法。
增量学习策略可以逐步添加训练数据,不断改进神经网络模型,提高系统的性能和稳定性。
三、智能移动机器人应用场景智能移动机器人具有广泛的应用场景,比如:1.医疗领域:机器人可以在医院中进行轻松的病人转运和医疗物资运输,减轻医护人员的工作负担;2.教育领域:机器人可以作为教育辅助工具,辅助教育教学,提高教育质量;3.娱乐领域:机器人可以作为娱乐工具和互动体验产品,增强用户体验;4. 安保领域:机器人可以作为安保巡逻设备,保障社会安全;5. 工业自动化领域:机器人可以用于工厂生产流水线上的自动化操作,提高生产效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于神经网络的移动机器人对路径形式的识别与分
类
在已知路径时,要求移动机器人快速准确地进行路径跟踪是柔性装配系
统中实现物料自动传输的一个关键技术。目前,许多学者都是在笛卡尔坐标空
间中,建立移动机器人的实际位姿和期望位姿之间的误差矢量,并采用该误差
矢量作为系统的反馈来消除跟踪误差,并设法在控制过程中减少有关移动机器
人的运动学和动力学的计算量,提高算法的实时性[1~4]。但移动机器人在
路径跟踪过程中,始终是处于纠偏状态下,其运动路线呈“蛇”形轨迹,从而
影响移动机器人的跟踪精度。为此,在分析传统路径跟踪方式所存在的不足的
基础上,笔者采用神经网络技术,分析了路径特征向量的抽取方法,设计了用
于移动机器人路径识别的分类器,实现了移动机器人对其所跟踪路径进行实时
识别和分类,进而按照所识别的路径形式进行跟踪,提高了路径跟踪精度。
1、传统路径跟踪方式分析
1.1 切线跟踪方式与弦线跟踪方式
切线跟踪方式是移动机器人通过在不同位置对不同直线的跟踪来达到对
曲线的跟踪。如图1的误差分析所示,用采样点Oi处的切线 SOi 来逼近曲线
Oi-1Oi,由于移动机器人在运动过程中对控制指令有滞后现象,当采样点A位于
切线与曲线之间时,移动机器人将误认为产生了右偏差,控制器将产生向左的
纠偏指令,从而导致误差加大,而且随着滞后现象的加剧,跟踪误差将随之加
大。同样Waxmax等[5]提出的弦线跟踪方式也会出现此类现象。
图1 切线跟踪方式
1.2 圆弧跟踪方式
圆弧跟踪方式相当于用分段圆弧来拟合曲线路径[6],该方法在一定程
度上改善了切线跟踪和弦线跟踪的不足,路径跟踪精度有一定的提高,但由于
分段跟踪圆弧的曲率在路径跟踪中是不变的,因此当路径采样圆弧与分段跟踪
圆弧的曲率半径差别较大时,尤其是当路径采样圆弧出现直线、采样点位于二
者之间时,移动机器人也会产生远离期望路径的纠偏指令,使得跟踪误差加
大。
2、路径特征向量的抽取
如图2所示,设Pc 为移动机器人的当前实际位姿,Pr为其当前期望位
姿,则移动机器的误差分析
图2 路径跟踪中
人在路径跟踪中会产生方向误差Eh、横向偏移误差Ex和纵向偏移误差
Ey, 设误差矢量E和路径跟踪精度误差限δE 分别为
当E≤δE时,抽取当前路径段的特征向量,进行路径形式的识别和分
类,进而跟踪所识别的路径。否则控制转入纠偏模块进行纠偏。
图3 路径特征表示法
如图3所示,移动机器人前方路径段的特征向量Dm(m=i,j,k,…)即为
在每个采样点处移动机器人的当前实际位置与其期望位置之间在移动机器人坐
标系X′O′Y′中O′X′方向上的坐标值。
设(x′0,y′0)为移动机器人坐标原点在绝对坐标系XOY中的坐标,
(xm,ym)(m=i,j,k,…)为期望路径上对应采样点i,j,k,…在绝对坐标系XOY 中
的坐标,(x′m,y′m)为期望路径上对应采样点在移动机器人坐标系X′O′Y′
中的坐标,则根据前述Dm(m=i,j,k,…)的定义知
Dm=x′m=(xm-x′0)cosθ+(ym-y′0)sinθ
式中,(xm,ym)(m=i,j,k,…)和(x′0,y′0)以及θ由感知模块得到。
3、路径识别及其分类器的设计
3.1 移动机器人前方路径段的期望类别
根据移动机器人的驱动特性,可以将反映移动机器人前方路径段的期望
类别分成若干类。表1给出了9类路径类别的曲率,从而可以确定出描述各个期
望类别的特征向量,该特征向量就组成了用于训练神经网络的训练样本数据
库。
表1 各路径类别的曲率单位:1/mm