matlab sobel函数
matlab计算点云所围成的多边形

matlab计算点云所围成的多边形点云是计算机视觉领域中常用的数据表示形式,它由许多离散的三维点组成。
点云广泛应用于三维重建、目标检测、机器人导航等领域。
在本文中,我们将探讨如何利用MATLAB计算点云所围成的多边形。
我们需要了解点云的基本概念。
点云是由一系列点的集合组成的,每个点都有其在三维空间中的坐标。
在MATLAB中,我们可以使用PointCloud对象来表示点云数据。
PointCloud对象可以通过读取点云文件或者通过手动创建点云点集来获得。
在计算点云所围成的多边形之前,我们需要对点云进行一些预处理。
预处理的目的是去除杂乱的噪声点,并将点云调整到合适的尺度。
常见的预处理步骤包括滤波、点云配准和点云分割。
滤波是预处理中常用的一步,它可以去除点云中的噪声点。
MATLAB提供了各种滤波算法,如卡尔曼滤波、高斯滤波等。
我们可以根据实际情况选择合适的滤波算法,并将其应用于点云数据。
点云配准是将多个点云对齐到同一个坐标系的过程。
在实际应用中,我们可能会有多个不同角度或位置的点云数据。
通过点云配准,我们可以将这些点云对齐到同一个坐标系,以便后续处理。
点云分割是将点云划分为多个子集的过程。
在某些情况下,我们可能只对点云中的某一部分感兴趣,例如一个物体或一个场景。
通过点云分割,我们可以将点云划分为多个子集,并选择我们感兴趣的子集进行后续处理。
在预处理完成后,我们可以开始计算点云所围成的多边形。
对于一个给定的点云数据,我们可以通过以下步骤来计算其所围成的多边形。
我们需要对点云进行表面重建。
表面重建的目的是根据点云数据生成一个连续的曲面模型。
MATLAB提供了多种表面重建算法,如Delaunay三角剖分、最近邻搜索等。
我们可以根据实际需求选择合适的算法,并将其应用于点云数据。
接下来,我们需要对生成的曲面模型进行轮廓提取。
轮廓提取的目的是找到曲面模型的边界。
在MATLAB中,我们可以使用边缘检测算法来提取曲面模型的边界。
MATLAB图像处理函数大全
Matlab图像处理函数大全目录图像增强 (3)1. 直方图均衡化的Matlab 实现 (3)1.1 imhist 函数 (3)1.2 imcontour 函数 (3)1.3 imadjust 函数 (3)1.4 histeq 函数 (4)2. 噪声及其噪声的Matlab 实现 (4)3. 图像滤波的Matlab 实现 (4)3.1 conv2 函数 (4)3.2 conv 函数 (5)3.3 filter2函数 (5)3.4 fspecial 函数 (6)4. 彩色增强的Matlab 实现 (6)4.1 imfilter函数 (6)图像的变换 (6)1. 离散傅立叶变换的Matlab 实现 (6)2. 离散余弦变换的Matlab 实现 (7)2.1. dct2 函数 (7)2.2. dict2 函数 (8)2.3. dctmtx函数 (8)3. 图像小波变换的Matlab 实现 (8)3.1 一维小波变换的Matlab 实现 (8)3.2 二维小波变换的Matlab 实现 (9)图像处理工具箱 (11)1. 图像和图像数据 (11)2. 图像处理工具箱所支持的图像类型 (12)2.1 真彩色图像 (12)2.2 索引色图像 (13)2.3 灰度图像 (14)2.4 二值图像 (14)2.5 图像序列 (14)3. MATLAB图像类型转换 (14)4. 图像文件的读写和查询 (15)4.1 图形图像文件的读取 (15)4.2 图形图像文件的写入 (16)4.3 图形图像文件信息的查询imfinfo()函数 (16)5. 图像文件的显示 (16)5.1 索引图像及其显示 (16)5.2 灰度图像及其显示 (16)5.3 RGB 图像及其显示 (17)5.4 二进制图像及其显示 (17)5.5 直接从磁盘显示图像 (18)图像处理函数 (18)图像处理函数详解——strel (18)图像处理函数详解——roipoly (19)图像处理函数详解——roifilt2 (20)图像处理函数详解——roifill (20)图像处理函数详解——roicolor (21)matlab图像处理函数详解——rgb2gray (22)Matlab图像处理函数:regionprops (22)图像处理函数详解——padarray (26)图像处理函数详解——nlfilter (27)图像处理函数详解——montage (27)函数详解——mat2gray (28)图像处理函数详解——imclose (29)图像处理函数详解——imopen (29)图像处理函数详解——imerode (30)图像处理函数详解——imdilate (30)图像处理函数详解——imresize (31)图像处理函数详解——imnoise (32)图像处理函数详解——imhist (32)图像处理函数详解——imfinfo (33)图像处理函数详解——imcomplement (34)图像处理函数详解——imapprox (35)图像处理函数详解——imadjust (35)图像处理函数详解——imadd (36)图像处理函数详解——im2uint8 (36)图像处理函数详解——im2bw (37)图像处理函数详解——histeq (37)图像处理函数详解——dither (38)图像处理函数详解——conv2 (38)图像处理函数详解——colfilt (39)图像处理函数详解——bwperim (39)图像处理函数详解——bwlabel (40)图像处理函数详解——bwareaopen (41)图像增强1. 直方图均衡化的Matlab 实现1.1 imhist 函数功能:计算和显示图像的色彩直方图格式:imhist(I,n)imhist(X,map)说明:imhist(I,n) 其中,n 为指定的灰度级数目,缺省值为256;imhist(X,map) 就算和显示索引色图像 X 的直方图,map 为调色板。
matlab常用滤波器

matlab常⽤滤波器⾸先关于fspecial函数的定义,fspecial函数⽤于建⽴预定义的滤波算⼦。
其语法格式为:h = fspecial(type)h = fspecial(type,para)其中type指定算⼦的类型,para指定相应的参数;函数type的类型有:1、'average'averaging filter为均值滤波,参数为hsize代表模板尺⼨,默认值为[3,3]。
函数格式:H = fspecial('average',hsize)2、 'disk'circular averaging filter为圆形区域均值滤波,参数为radius代表区域半径,默认值为5。
函数格式:H = fspecial('disk',radius)3、'gaussian'Gaussian lowpass filter为⾼斯低通滤波,有两个参数,hsize表⽰模板尺⼨,默认值为[3 3],sigma为滤波器的标准值,单位为像素,默认值为0.5。
函数格式:H = fspecial('gaussian',hsize,sigma)4、'laplacian' filter approximating the 2-D Laplacian operatorlaplacian filter为拉普拉斯算⼦,参数alpha⽤于控制算⼦形状,取值范围为[0,1],默认值为0.2.函数格式:H = fspecial('laplacian',alpha)5、'log'Laplacian of Gaussian filter为拉普拉斯⾼斯算⼦,有两个参数,hsize表⽰模板尺⼨,默认值为[3 3],sigma为滤波器的标准差,单位为像素,默认值为0.5。
函数格式:H = fspecial('log',hsize,sigma)6、'motion'motion filter运动模糊算⼦,有两个参数,表⽰摄像物体逆时针⽅向以theta⾓度运动了len个像素,len的默认值为9,theta的默认值为0。
matlab 边缘锐化算法
matlab 边缘锐化算法Matlab边缘锐化算法是一种用于图像处理和计算机视觉领域的重要技术。
边缘锐化算法可以提取图像中的边缘信息,使图像更加清晰和有层次感。
在本文中,我们将介绍Matlab中常用的边缘锐化算法,并详细解释其原理和应用。
我们来了解一下什么是图像的边缘。
在图像中,边缘是指图像中颜色、亮度或纹理等特征发生较大变化的区域。
边缘可以提供图像的形状和结构信息,因此在图像处理和计算机视觉中具有重要的作用。
边缘锐化算法的目标是增强图像中的边缘信息,使其更加清晰和明显。
在Matlab中,常用的边缘锐化算法包括Sobel算子、Prewitt 算子、Roberts算子和Canny算子等。
我们来介绍Sobel算子。
Sobel算子是一种基于梯度的边缘检测算法,它通过计算图像中每个像素点的梯度值来检测边缘。
Sobel算子分为水平和垂直两个方向,分别计算图像在x和y方向上的梯度值,然后将两个梯度值合并得到最终的边缘图像。
Prewitt算子与Sobel算子类似,也是一种基于梯度的边缘检测算法。
Prewitt算子将图像分为水平和垂直两个方向,分别计算图像在x和y方向上的梯度值,然后将两个梯度值合并得到最终的边缘图像。
Roberts算子是一种简单而有效的边缘检测算法。
它通过计算图像中每个像素点与其相邻像素点的差值来检测边缘。
Roberts算子分为两个方向,分别计算图像在x和y方向上的差值,然后将两个差值合并得到最终的边缘图像。
Canny算子是一种较为复杂的边缘检测算法,它综合考虑了图像的梯度和灰度信息,并利用阈值和非极大值抑制等技术来提取边缘。
Canny算子在边缘检测中具有较好的性能,常被用于实际应用中。
在Matlab中,我们可以使用imfilter函数来实现边缘锐化算法。
该函数可以对图像进行卷积操作,通过设置不同的卷积核来实现不同的边缘锐化效果。
例如,可以使用fspecial函数生成Sobel、Prewitt、Roberts等算子的卷积核,然后将卷积核作用于图像上,即可得到相应的边缘图像。
sobel算子
Sobel算子改进算法通过以上对经典边缘检测算法的分析可知,Sobel算法的优点是计算简单,速度快。
但是由于只采用了2个方向的模板,只能检测水平和垂直方向的边缘,因此这种算法对于纹理较为复杂的图像,其边缘检测效果就不是很理想。
该算法认为:凡灰度新值大于或等于阈值的像素点时都是边缘点。
这种判断欠合理,会造成边缘点的误判,因为许多噪声点的灰度值也很大。
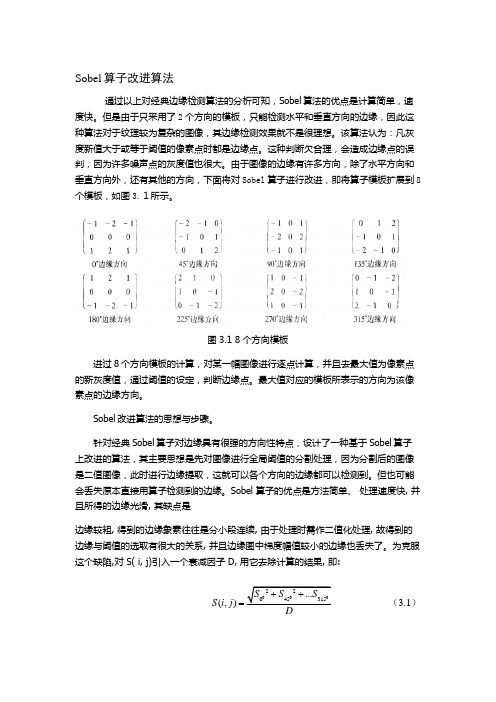
由于图像的边缘有许多方向,除了水平方向和垂直方向外,还有其他的方向,下面将对Sobel算子进行改进,即将算子模板扩展到8个模板,如图3.1所示。
图3.1 8个方向模板进过8个方向模板的计算,对某一幅图像进行逐点计算,并且去最大值为像素点的新灰度值,通过阈值的设定,判断边缘点。
最大值对应的模板所表示的方向为该像素点的边缘方向。
Sobel改进算法的思想与步骤。
针对经典Sobel算子对边缘具有很强的方向性特点,设计了一种基于Sobel算子上改进的算法,其主要思想是先对图像进行全局阈值的分割处理,因为分割后的图像是二值图像,此时进行边缘提取,这就可以各个方向的边缘都可以检测到。
但也可能会丢失原本直接用算子检测到的边缘。
Sobel 算子的优点是方法简单、处理速度快, 并且所得的边缘光滑, 其缺点是边缘较粗, 得到的边缘象素往往是分小段连续, 由于处理时需作二值化处理, 故得到的边缘与阈值的选取有很大的关系, 并且边缘图中梯度幅值较小的边缘也丢失了。
为克服这个缺陷,对 S( i, j)引入一个衰减因子 D, 用它去除计算的结果, 即:(,)S i j=(3.1)因此,用处理后的所得到图像与Sobel 算子直接对原始图像进行边缘检测的图像相加,这一步显得尤为重要。
最后分别对数字图像和红外图像进行MATLAB 仿真,从仿真的结果可以看出,此算法具有较好的精度。
三次样条插值Sobel 算子检测出像素级边缘后,为了得到亚像素级的边缘,要对灰度边缘图进行内插处理。
插值算法有很多种,例如最近邻插值、双线性插值、三次样条插值等等。
matlab函数大全
matlab函数⼤全Matlab 图像处理相关函数命令⼤全⼀、通⽤函数:colorbar 显⽰彩⾊条语法:colorbar \ colorbar('vert') \ colorbar('horiz') \ colorbar(h) \ h=colorbar(...) \ colorbar(...,'peer',axes_handle)getimage 从坐标轴取得图像数据语法:A=getimage(h) \ [x,y,A]=getimage(h) \ [...,A,flag]=getimage(h) \ [...]=getimageimshow 显⽰图像语法:imshow(I,n) \ imshow(I,[low high]) \ imshow(BW) \ imshow(X,map) \ imshow(RGB)\ imshow(...,display_option) \ imshow(x,y,A,...) \ imshow filename \ h=imshow(...)montage 在矩形框中同时显⽰多幅图像语法:montage(I) \ montage(BW) \ montage(X,map) \ montage(RGB) \ h=montage(...)immovie 创建多帧索引图的电影动画语法:mov=immovie(X,map) \ mov=immovie(RGB)subimage 在⼀副图中显⽰多个图像语法:subimage(X,map) \ subimage(I) \ subimage(BW) \ subimage(RGB) \ subimage(x,y,...) \ subimage(...)truesize 调整图像显⽰尺⼨语法:truesize(fig,[mrows mcols]) \ truesize(fig)warp 将图像显⽰到纹理映射表⾯语法:warp(X,map) \ warp(I ,n) \ warp(z,...) warp(x,y,z,...) \ h=warp(...)zoom 缩放图像语法:zoom on \ zoom off \ zoom out \ zoom reset \ zoom \ zoom xon \ zoom yon\ zoom(factor) \ zoom(fig,option)⼆、图像⽂件I/O函数命令imfinfo 返回图形图像⽂件信息语法:info=imfinfo(filename,fmt) \ info=imfinfo(filename)imread 从图像⽂件中读取(载⼊)图像语法:A=imread(filename,fmt) \ [X,map]=imread(filename,fmt) \ [...]=imread(filename) \ [...]=imread(URL,...) \ [...]=imread(...,idx) (CUR,ICO,and TIFF only) \ [...]=imread(...,'frames',idx) (GIF only) \ [...]=imread(...,ref) (HDF only) \ [...]=imread(...,'BackgroundColor',BG) (PNG only) \ [A,map,alpha] =imread(...) (ICO,CUR,PNG only)imwrite 把图像写⼊(保存)图像⽂件中语法:imwrite(A,filename,fmt) \ imwrite(X,map,filename,fmt) \ imwrite(...,filename) \ imwite(...,Param1,Val1,Param2,Val2...)imcrop 剪切图像语法:I2=imcrop(I) \ X2=imcrop(X,map) \ RGB2=imcrop(RGB) \ I2=imcrop(I,rect) \ X2=imcrop(RGB,rect) \ [...]=imcrop(x,y,...) \[A,rect]=imcrop(...) \ [x,y,A,rect]=imcrop(...)imresize 改变图像⼤⼩语法:B=imresize(A,m,method)imrotate 旋转图像语法:B=imrotate(A,angle,method) \ B=imrotate(A,angle,method,'crop')三、像素和统计处理函数corr2 计算两个矩形的⼆维相关系数语法:r=corr2(A,B)imcontour 创建图像数据的轮廓图语法:imcontour(I,n) \ imcontour(I,v) \ imcontour(x,y,...) \ imcontour(...,LineSpec) \ [C,h] =imcontour(...)imfeature 计算图像区域的特征尺⼨语法:stats=imfeature(L,measurements) \ stats=imfeature(L,measurements,n)imbist 显⽰图像数据的柱状图impixel 确定像素颜⾊值语法:P=impixel(I) \ P=impixel(X,map) \ P=impixel(RGB) \ P=impixel(I,c,r) \ P=impixel(X,map,c,r) \ P=impixel(RGB,c,r) \ [c,r,P]=impixel(...) \ P=impixel(x,y,I,xi,yi) \ P=impixel(x,y,RGB,xi,yi) \ P=impixel(x,y,X,map,xi,yi) \[xi,yi,P]=impixel(x,y,...)improfile 沿线段计算剖⾯图的像素值语法:c=improfile \ c=improfile(n) \ c=improfile(I,xi,yi) \ c=improfile(I,xi,yi,n) \ [cx,cy,c]=improfile(...) \ [cx,cy,c,xi,yi]=improfile(...) \ [...]=improfile(x,y,I,xi,yi) \ [...]=improfile(x,y,I,xi,yi,n) \ [...]=improfile(...,method)mean2 计算矩阵元素的平均值语法:B=mean2(A)pixval 显⽰图像像素信息语法:pixval onstd2 计算矩阵元素的标准偏移语法:b=std2(A)四、图像分析函数:edge 图像边缘检测语法:BW=edge(I,'sobel') \ BW=edge(I,'sobel',thresh) \ BW=edge(I,'sobel',thresh,direction) \ [BW,thresh]=edge(I,'sobel',...) \BW=edge(I,'prewitt') \ BW=edge(I,'prewitt',thresh) \ BW=edge(I,'prewitt',thresh,direction) \[BW,thresh]=edge(I,'prewitt',...) \ BW=edge(I,'roberts') \ BW=edge(I,'roberts',thresh) \ [BW,thresh]=edge(I,'roberts',...) \ BW=edge(I,'log') \ BW=edge(I,'log',thresh) \ BW=edge(I,'log',thresh,sigma) \ [BW,threshold]=edge(I,'log',...) \ BW=edge(I,'zerocross',thresh,h) \[BW,thresh]=edge(I,'zerocross',...) \BW=edge(I,'canny') \ BW=edge(I,'canny',thresh) \ BW=edge(I,'canny',thresh,sigma) \ [BW,threshold]=edge(I,'canny',...)qtgetblk 获取四叉树分解的块值语法:[vals,r,c]=qtgetblk(I,S,dim) \ [vals,idx]=qtgetblk(I,S,dim)qtsetblk 设置四叉树分解中的块值语法:J=qtsetblk(I,S,dim,vals)五、图像增强函数histeq ⽤柱状图均等化增强对⽐语法:J=histeq(I,hgram) \ J=histeq(I,n) \ [J,T]=histeq(I,...) \ newmap=histeq(X,map,hgram) \ newmap=histeq(X,map)imadjust 调整图像灰度值或颜⾊映像表语法:J=imadjust(I,[low_in ,high_in]),[low_out ,high_out],gamma) \ newmap=imadjust(map,[low_in ,high_in]),[low_out ,high_out],gamma) \ RGB2=imadjust(RGB1,...)imnoise 增强图像的渲染效果语法:J=imnoise(I,type) \ J=imnoise(I,type,parameters)medfilt2 进⾏⼆维中值过滤语法:B=medfilt2(A,[m n]) \ B=medfilt2(A) \ B=medfilt2(A,'indexed',...)ordfilt2 进⾏⼆维统计顺序过滤语法:B=ordfilt2(A,order,domain) \ B=ordfilt2(A,order,domain,S) \ B=ordfilt2(...,padopt)wiener2 进⾏⼆维适应性去噪过滤处理语法:J=wiener2(I,[m n],noise) \ [J,noise]=wiener2(I,[m n])六、线性滤波函数conv2 进⾏⼆维卷积操作语法:C=conv2(A,B) \ C=conv2(hcol,hrow,A) \ C=conv2(...,'shape')convmtx2 计算⼆维卷积矩阵语法:T=convmtx2(H,m,n) \ T=convmtx2(H,[m n])convn 计算n维卷积语法:C=convn(A,B) \ C=convn(A,B,'shape')filter2 进⾏⼆维线性过滤操作语法:Y=filter2(h,X) \ Y=filter2(h,X,shape)fspecial 创建预定义过滤器语法:h=fspecial(type) \ h=fspecial(type,parameters)七、线性⼆维滤波设计函数freqspace 确定⼆维频率响应的频率空间语法:[f1,f2]=freqspace(n) \ [f1,f2]=freqspace([m n]) \ [x1 ,y1]=freqspace(...,'meshgrid') \ f=freqspace(N) \ f=freqspace(N,'whole') freqz2 计算⼆维频率响应语法:[H,f1,f2]=freqz2(h,n1,n2) \ [H,fi,f2]]=freqz2(h,[n2,n1]) \ [H,fi,f2]]=freqz2(h,f1,f2]) \ [H,fi,f2]]=freqz2(h) \ [...]=freqz2(h,...,[dx dy]) \ [...]=freqz2(h,...,dx) \ freqz2(...)fsamp2 ⽤频率采样法设计⼆维FIR过滤器语法:h=fsamp2(Hd) \ h=fsamp2(f1,f2,Hd,[m n])ftrans2 通过频率转换设计⼆维FIR过滤器语法:h=ftrans2(b,t) \ h=ftrans2(b)fwind1 ⽤⼀维窗⼝⽅法设计⼆维FIR过滤器语法:h=fwind1(Hd,win) \ h=fwind1(Hd,win1,win2) \ h=fwind1(f1,f2,Hd,...)fwind2 ⽤⼆维窗⼝⽅法设计⼆维FIR过滤器语法:h=fwind2(Hd,win) \ h=fwind2(f1,f2,Hd,win)⼋、图像变换函数dct2 进⾏⼆维离散余弦变换(反余弦变换⽤idct2)语法:B=dct2(A) \ B=dct2(A,m.n) \ B=dct2(A,[m n])dctmtx 计算离散余弦傅⽴叶变换语法:D=dctmtx(n)fft2 进⾏⼆维快速傅⽴叶变换(反变换⽤ifft2)语法:Y=fft2(X) \ Y=fft2(X,m,n)fftn 进⾏n维快速傅⽴叶变换(反变换⽤ifftn)语法:Y=ffn(X) \ Y=fftn(X,siz)fftshift 快速傅⽴叶变换的DC组件移到光谱中⼼语法:Y=fftshift(X) \ Y=fftshift(X,dim)iradon 进⾏反radon变换语法:I=iradon(P,theta) \ I=iradon(P,theta,interp,filter,d,n) \ [I,h]=iradon(...)phantom 产⽣⼀个头部幻影图像语法:P=phantom(def,n) \ P=phantom(E,n) \ [P,E]=phantom(...)radon 计算radon变换语法:R=radon(I,theta) \ [R,xp]=radon(...)九、边沿和块处理函数bestblk 确定进⾏块操作的块⼤⼩语法:siz=bestblk([m n],k) \ [mb,nb]=bestblk([m n],k)blkproc 实现图像的显⽰块操作语法:B=blkproc(A,[m n]),fun) \ B=blkproc(A,[m n],fun,P1,P2,...) \ B=blkproc(A,[m n],[mborder nborder],fun,...)col2im 将矩阵的列重新组织到块中语法:A=col2im(B,[m n],[mm nn],block_type) \ A=col2im(B,[m n],[mm nn])colfilt 利⽤列相关函数进⾏边沿操作语法:B=colfilt(A,[m n],block_type,fun) \ B=colfilt(A,[m n],block_type,fun,P1,P2,...) \ B=colfilt(A,[m n],[mblock nblock],...) \B=colfilt(A,'indexed',...)im2col 重调图像块为列语法:B=im2col(A,[m n],block_type) \ B=im2col(A,[m n]) \ B=im2col(A,'indexed',...)nlfilter 进⾏边沿操作语法:B=nlfilter(A,[m n],fun) \ B=nlfilter(A,[m n],fun,P1,P2,...) \ B=nlfilter(A,'indexed',...)⼗、⼆进制图像操作函数applylut 在⼆进制图像中利⽤lookup表进⾏⾏边沿操作语法:A=applylut(BW,LUT)bwarea 计算⼆进制图像对象的⾯积语法:total=bwarea(BW)bweuler 计算⼆进制图像的欧拉数语法:eul=bweuler(BW)bwfill 填充⼆进制图像的背景⾊语法:BW2=bwfill(BW1,c,r,n) \ BW2=bwfill(BW1,n) \ [BW2,idx]=bwfill(...) \ BW2=bwfill(x,y,BW1,xi,yi,n) \ [x,y,BW2,idx,xi,yi]=bwfill(...) \[BW2,idx]=bwfill(BW1,'holes',n)bwlabel 标注⼆进制图像中已连接的部分语法:L=bwlabel(BW,n) \ [L,num]=bwlabel(BW,n)bwmorph 提取⼆进制图像的轮廓语法:BW2=bwmorph(BW1,operation) \ BW2=bwmorph(BW1,operation,n)bwperim 计算⼆进制图像中对象的周长语法:BW2=bwperim(BW1) \ BW2=bwperim(BW1,CONN)bwselect 在⼆进制图像中选择对象语法:BW2=bwselect(BW1,c,r,n) \ BW2=bwselect(BW1,n) \ [BW2,idx]=bwselect(...) \ BW2=bwselect(x,y,BW1,xi,yi,n) \[x,y,BW2,idx,xi,yi]=bwselect(...)dilate 放⼤⼆进制图像语法:BW2=dilate(BW1,SE) \ BW2=dilate(BW1,SE,alg) \ BW2=dilate(BW1,SE,...,n)erode 弱化⼆进制图像的边界语法:BW2=erode(BW1,SE) \ BW2=erode(BW1,SE,alg) \ BW2=erode(BW1,SE,...,n)makelut 创建⼀个⽤于applylut函数的lookup表语法:lut=makelut(fun,n) \ lut=makelut(fun,n,P1,P2,...)⼗⼀、区域处理函数roicolor 选择感兴趣的颜⾊区语法:BW=roicolor(A,low,high) \ BW=rocicolor(A,v)roifill 在图像的任意区域中进⾏平滑插补语法:J=roifill(I,c,r) \ J=roifill(I) \ J=roifill(I,BW) \ [J,BW]=roifill(...) \ J=roifill(x,y,I,xi,yi) \ [x,y,J,BW,xi,yi]=roifill(...)roifilt2 过滤敏感区域语法:J=roifilt2(h,I,BW) \ J=roifilt2(I,BW,fun) \ J=roifilt2(I,BW,fun,P1,P2,...)roipoly 选择⼀个敏感的多边形区域语法:BW=roipoly(I,c,r) \ BW=roipoly(I) \ BW=roipoly(x,y,I,xi,yi) \ [BW,xi,yi]=roipoly(...) \ [x,y,BW,xi,yi]=roipoly(...)⼗⼆、颜⾊映像处理函数brighten 增加或降低颜⾊映像表的亮度语法:brighten(beta) \ brighten(h,beta) \ newmap=brighten(beta) \ newmap=brighten(cmap,beta)cmpermute 调整颜⾊映像表中的颜⾊语法:[Y,newmap]=cmpermute(X,map) \ [Y,newmap]=cmpermute(X,map,index)cmunigue 查找颜⾊映像表中特定的颜⾊及相应的图像语法:[Y,newmap]=cmunigue(X,map) \ [Y,newmap]=cmunigue(RGB) \ [Y,newmap]=cmunique(I)imapprox 对索引图像进⾏近似处理语法:[Y,newmap]=imapprox(X,map,n) \ [Y,newmap]=imapprox(X,map,tol) \ Y=imapprox(X,map,newmap) \ [...]=imapprox(...,dither_option) rgbplot 划分颜⾊映像表语法:rgbplot(cmap)⼗三、颜⾊空间转换函数hsv2rgb 转换HSV值为RGB颜⾊空间:M=hsv2rgb(H)ntsc2rgb 转换NTSC值为RGB颜⾊空间:rgbmap=ntsc2rgb(yiqmap) \ RGB=ntsc2rgb(YIQ)rgb2hsv 转换RGB值为HSV颜⾊空间:cmap=rgb2hsv(M)rgb2ntsc 转换RGB值为NTSC颜⾊空间:yiqmap=rgb2ntsc(rgbmap) \ YIQ=rgb2ntsc(RGB)rgb2ycbcr 转换RGB值为YCbCr颜⾊空间:ycbcrmap=rgb2ycbcr(rgbmap) \ YCBCR=rgb2ycbcr(RGB) ycbcr2rgb 转化YCbCr值为RGB颜⾊空间:rgbmap=ycbcr2rgb(ycbcrmap) \ RGB=ycbcr2rgb(YCBCR)⼗四、图像类型和类型转换函数dither 通过抖动增加外观颜⾊分辨率转换图像语法:X=dither(RGB,map) \ BW=dither(I)gray2ind 转换灰度图像为索引图像语法:[X,map]=gray2ind(I,n) \ [X,map]=gray2ind(BW,n)grayslice 从灰度图像为索引图像语法:X=grayslice(I,n) \ X=grayslice(I,v)im2bw 转换图像为⼆进制图像语法:BW=im2bw(I,level) \ BW=im2bw(X,map,level) \ BW=im2bw(RGB,level)im2double 转换图像矩阵为双精度型语法:I2=im2double(I1) \ RGB2=im2double(RGB1) \ I=im2double(BW) \ X2=im2double(X1,'indexed') double 转换数据为双精度型语法:double(X)unit8 、unit16转换数据为8位、16位⽆符号整型: i=unit8(x) \ i=unit16(x)im2unit8 转换图像阵列为8位⽆符号整型语法:I2=im2unit8(I1) \ RGB2=im2unit8(RGB1) \ I=im2unit8(BW) \ X2=im2unit8(X1,'indexed')im2unit16 转换图像阵列为16位⽆符号整型语法:I2=im2unit16(I1) \ RGB2=im2unit16(RGB1) \ I=im2unit16(BW) \ X2=im2unit16(X1,'indexed') ind2gray 把检索图像转化为灰度图像语法:I=ind2gray(X,map)ind2rgb 转化索引图像为RGB真彩图像语法:RGB=ind2rgb(X,map)isbw 判断是否为⼆进制图像语法:flag=isbw(A)isgray 判断是否为灰度图像语法:flag=isgray(A)isind 判断是否为索引图像语法:flag=isind(A)isrgb 判断是否为RGB真彩⾊图像语法:flag=isrgb(A)mat2gray 转换矩阵为灰度图像语法:I=mat2gray(A,[amin amax]) \ I=mat2gray(A)rgb2gray 转换RGB图像或颜⾊映像表为灰度图像语法:I=rgb2gray(RGB) \ newmap=rgb2gray(map)rgb2ind 转换RGB图像为索引图像语法:[X,map]=rgb2ind(RGB,tol) \ [X,map]=rgb2ind(RGB,n) \ X=rgb2ind(RGB,map) \ [...]=rgb2ind(...,dither_option)⼗五、新增图像处理⼯具箱函数adapthisteq 限制对⽐度直⽅图均衡化: J=adapthisteq(I) \ J=adapthisteq(I,param1,val1,param2,val2...)applycform ⽤于颜⾊空间变换 out=applyform(I,C)bwboundaries 描绘⼆进制图像边界语法: B=bwboundaries(BW) \ B=bwboundaries(BW,CONN) \ B=bwboundaries(BW,CONN,options) [BW,CONN,options] \ [BL]=bwboundaries(...) \ [BLNA]=bwboundaries()bwtraceboundary 描述⼆进制图像中的物体B=bwtraceboundary(BW,P,fstep) \ B=bwtraceboundary(BW,P,fstep,CONN) \ B=bwtraceboundary(...N,dir)decorrstrech 对多通道图像进⾏去相关处理语法:S=decorrstretch(I) \ S=decorrstretch(I,TOL)dicomdict 获取或读取DICOM⽂件语法:dicomdict('set',dictionary) \ dictionary=dicomdict('get')getline ⽤⿏标选择ployline语法:[x,y]=getline(fig) \ [x,y]=getline(ax) \ [x,y]=getline \ [x,y]=getline(...,'closed')getpts ⽤⿏标选择像素点语法:[x,y]=getpts(fig) \ [x,y]=getpts(ax) \ [x,y]=getptsgetrect ⽤⿏标选择矩阵语法:rect=getrect(fig) \ rect=getrect(ax) \ rect=getrect(fig)iccread 读取ICC剖⾯语法:P=iccread(filename)im2java2d 将图像转换为Java缓冲图像语法:jimage=im2java2d(I) \ jimage=im2java2d(X,MAP)imview 在图像与蓝旗中显⽰图像语法:imview(I) \ imview(RGB) \ imview(X,map) \imview(I,range) \ imview(filename) \ imview(....'InitialMagnification',initial_mag) \ h=imview(...) \ imview close allippl 检查IPPL的存在语法:TF=ippl \ [TF B]=ippliptdemos 显⽰图像处理⼯具箱中的索引图像lab2double、lab2unit16、lab2unit8 将L*a*b数据分别转换为双精度、16位数据、8位数据makecform 创造⼀个⾊彩转换结构poly2mask 把多边形区域转换成mask区域语法:BW=poly2mask(x,y,m,n)unitlut 查找表中A像素值语法:B=unitlut(A,LUT)xyz2double、xyz2unit16 将颜⾊数据从XYZ转换到双精度、16进制。
MATLAB图像处理函数详解

MATLAB在图像处理中的函数图像增强1. 直方图均衡化的 Matlab 实现1.1 imhist 函数功能:计算和显示图像的色彩直方图格式:imhist(I,n)imhist(X,map)说明:imhist(I,n) 其中,n 为指定的灰度级数目,缺省值为256;imhist(X,map) 就算和显示索引色图像 X 的直方图,map 为调色板。
用 stem(x,counts) 同样可以显示直方图。
1.2 imcontour 函数功能:显示图像的等灰度值图格式:imcontour(I,n),imcontour(I,v)说明:n 为灰度级的个数,v 是有用户指定所选的等灰度级向量。
1.3 imadjust 函数功能:通过直方图变换调整对比度格式:J=imadjust(I,[low high],[bottomtop],gamma)newmap=imadjust(map,[low high],[bottomtop],gamma)说明:J=imadjust(I,[low high],[bottomtop],gamma) 其中,gamma 为校正量r,[low high] 为原图像中要变换的灰度范围,[bottom top] 指定了变换后的灰度范围;newmap=imadjust(map,[low high],[bottom top],gamma) 调整索引色图像的调色板 map 。
此时若 [low high] 和 [bottom top] 都为2×3的矩阵,则分别调整 R、G、B 3个分量。
1.4 histeq 函数功能:直方图均衡化格式:J=histeq(I,hgram)J=histeq(I,n)[J,T]=histeq(I,...)newmap=histeq(X,map,hgram)newmap=histeq(X,map)[new,T]=histeq(X,...)说明:J=histeq(I,hgram) 实现了所谓“直方图规定化”,即将原是图象 I 的直方图变换成用户指定的向量hgram 。
图像锐化处理实验报告
图像锐化处理实验报告图像锐化处理实验报告一.实验目的学会用Matlab 中的函数对输入图像按实验内容对图像进行锐化,感受各种不同的图像处理方法对最终图像效果的影响,最后进行综合练习。
二.实验内容1.仔细阅读Matlab 帮助文件中有关以下函数的使用说明,主要有imfilter 、fspecial 、imadjust 等。
2.使用imfilter 函数分别采用Sobel ,Laplacian 算子对cameraman.jpg 图像作锐化运算,显示运算前后的图像。
算子输入方法(两种方法都做):(1)用fspecial 函数产生(fspecial 仅能产生垂直方向sobel 算子,产生Laplacian 算子时alpha 参数选择0)。
(2)直接输入Sobel 算子形式为121000121x d ---⎡⎤=⎢⎥⎢⎥⎣⎦(水平Sobel ) 101202101y d -⎡⎤=-⎢⎥⎢⎥-⎣⎦(垂直Sobel ) Laplacian 算子形式为010141010-⎡⎤--⎢⎥⎢⎥-⎣⎦。
对于Sobel 22x y d d +生成图像;对于Laplacian 算子,直接采用计算结果作为锐化后图像。
3.将skeleton.jpg 图像文件读入Matlab ,按照以下步骤对其进行处理:(1)用带对角线的Laplacian 对其处理,以增强边缘。
对角线Laplacian 算子为111181111---⎡⎤--⎢⎥⎢⎥---⎣⎦。
(2)将(1)结果叠加到原始图像上。
可以看出噪声增强了(Laplacian算子对噪声敏感),应想办法降低。
(3)获取Sobel 图像并用imfilter 对其进行5×5邻域平均,以减少噪声(4)获取2)和3)相乘图像,噪声得以减少。
(5)将(4)结果叠加到原始图像上。
(6)最后用imadjust 函数对5)结果做幂指数为0.2的灰度变换。
4.编写Roberts 梯度锐化函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、介绍MATLAB Sobel函数
MATLAB中的Sobel函数是图像处理工具箱中常用的函数之一,它主要用于边缘检测。
Sobel算子是一种常用的边缘检测算子,可以帮助我们找到图像中的边缘,对图像进行分割和识别等操作起到了至关重要的作用。
在MATLAB中,我们可以通过调用Sobel函数来实现对图像的边缘检测,以及其他相关的图像处理操作。
二、Sobel算子的原理
Sobel算子是一种离散型的微分算子,用于检测图像中的边缘。
它通过对图像中每个像素点的灰度值进行加权求和,来获取该像素点的梯度值,并在图像中标记出边缘。
Sobel算子通常使用3x3的模板来进行计算,分为水平和垂直两个方向,分别对图像进行卷积操作。
水平方向的Sobel算子可以帮助我们检测图像中的垂直边缘,而垂直方向的Sobel算子可以帮助我们检测图像中的水平边缘。
三、MATLAB中Sobel函数的基本用法
在MATLAB中,我们可以通过调用Sobel函数来实现对图像的边缘检测。
Sobel函数的基本语法如下:
```
BW = edge(I,'sobel');
```
其中,I代表输入的灰度图像,'sobel'表示使用Sobel算子进行边缘检测。
调用Sobel函数后,将得到一个二值化的图像BW,其中边缘像
素被标记为1,非边缘像素被标记为0。
除了基本的边缘检测之外,Sobel函数还可以通过指定阈值来进行边缘强度的筛选,以及指定方向来进行特定方向的边缘检测。
例如:```
BW = edge(I,'sobel',threshold,direction);
```
其中,threshold表示设定的阈值,direction表示指定的方向。
通过这种方式,我们可以根据具体需求来定制化Sobel函数的边缘检测操作。
四、Sobel算子在图像处理中的应用
Sobel算子作为一种经典的边缘检测算子,在图像处理领域有着广泛的应用。
其主要应用包括但不限于以下几个方面:
1. 物体识别
使用Sobel算子进行边缘检测可以帮助我们找到图像中的物体轮廓,从而实现对物体的自动识别和定位。
在工业自动化、计算机视觉等领域,Sobel算子的应用十分广泛。
2. 图像分割
通过Sobel算子进行边缘检测,可以将图像中的目标物体与背景进行有效分离,从而实现图像的分割处理。
这对于图像分析、目标识别等
问题具有重要意义。
3. 图像增强
利用Sobel算子对图像进行边缘检测后,可以突出图像中的边缘信息,从而实现对图像的增强处理。
这对于图像的后续处理和分析具有重要
意义。
五、Sobel函数的优缺点分析
作为一种经典的边缘检测算子,Sobel算子有着其独特的优缺点:
1. 优点
Sobel算子运算简单高效,可以快速完成对图像的边缘检测,并且对
图像中的噪声具有一定的抑制效果。
在实际应用中,Sobel算子结果
较为稳定,对于大部分图像都能够得到较好的边缘检测效果。
2. 缺点
Sobel算子对图像中的边缘过于敏感,容易受到噪声的干扰,导致检
测结果不够准确。
Sobel算子对于边缘的方向存在一定的固有限制,
无法很好地适应图像中边缘的多样性。
六、结语
MATLAB中的Sobel函数作为一种常用的图像处理工具,具有较为广泛的应用前景。
通过对Sobel算子原理的理解,以及对Sobel函数的
灵活运用,可以帮助我们实现对图像的边缘检测,从而实现图像分割、识别等多种目的。
当然,Sobel算子也有其自身的局限性,需要根据
具体情况进行合理的选择和调整。
在未来的工作中,我们可以进一步
探索Sobel函数的应用,以及结合其他图像处理技术,实现更加精确
和高效的图像处理效果。
Sobel算子在图像处理中的应用是非常广泛的,尤其是在计算机视觉、模式识别、医学图像处理等领域具有重要
意义。
除了上文提到的物体识别、图像分割和图像增强等方面外,Sobel算子还在以下几个方面有重要的应用:
4. 缺陷检测
在工业生产中,使用Sobel算子进行边缘检测可以有效地排除产品表
面的瑕疵和缺陷,以保证产品质量。
5. 路面标线识别
交通安全领域需要对摄像头拍摄的路面图像进行处理,使用Sobel算
子进行边缘检测能够帮助识别出路面上的标线和边缘,从而提高自动
驾驶和驾驶辅助系统的性能。
6. 医学图像分析
在医学影像学中,Sobel算子可用于检测医学图像中的异常区域,例
如肿瘤边缘的识别和定位,有助于辅助医生进行诊断和治疗规划。
7. 行人检测
在智能监控系统和智能交通系统中,Sobel算子可以用于行人检测,
从而提高对人体目标的识别和跟踪效果。
另外,虽然Sobel算子具有其自身的局限性,但在实际应用中,可以
通过结合其他的图像处理技术来弥补其不足。
可以将Sobel算子与Canny边缘检测算法相结合,以获得更加精确和鲁棒的边缘检测结果。
在未来的工作中,可以进一步探索基于Sobel算子的图像处理方法,
并结合深度学习、卷积神经网络等新技术,以实现对图像进行更加精
确和高效的处理。
随着图像处理技术的不断发展和完善,Sobel算子
作为一种经典的边缘检测算子,将继续发挥重要的作用,并在更多的
领域得到应用和拓展。