基于自整角机数字转换器SDC1742的轴角检测电路设计
一种轴角编码器自动检测平台设计

一种轴角编码器自动检测平台设计
柳颖;杨洋
【期刊名称】《现代电子技术》
【年(卷),期】2022(45)19
【摘要】轴角编码器是某指控装备的核心器件,其主要功能是把输入轴的转动角度转变成一个对应的二进制编码。
该部件出现的故障频率高且部件脱离系统后修理难度大,因此提出研制轴角编码器自动检测平台的需求。
检测平台基于PXIe总线架构,选用多功能多路信号输入/输出采集卡采集轴角编码器的输出编码、采集轴角编码器工作时的转速及扭矩信号;选用程控电源模块提供检测平台所需的供电电源。
运用开源测试软件SeeSharpTools开发检测平台应用软件。
具备模拟轴角编码器实际工作状态,实时显示转动轴扭矩、转速值,采集编码器旋转角度对应的编码值并显示,并具有测试结果分析及打印测试报告的功能。
使用L支架结构安装轴角编码器,满足检测过程中频繁更换被测件的需求,极大提高了该轴角编码器的检测效率。
【总页数】4页(P111-114)
【作者】柳颖;杨洋
【作者单位】中国人民解放军91114部队
【正文语种】中文
【中图分类】TN606-34;TP206
【相关文献】
1.一种基于金属码盘的新型绝对式光电轴角编码器
2.一种新型光电轴角编码器译码方法研究
3.一种小型化双通道型轴角编码器的设计
4.一种新型的旋转变压器式轴角编码器
5.圆光栅增量式光电轴角编码器性能自动检测方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于三轴加速度计的倾斜角传感器的研究与设计_郭敏
传感器技术
郭 敏等 :基于三轴加速度计的倾斜角传感器的研究与设计
当 θ※0 时 :
lim
θ※0
ddFθ=-g
lim
θ※0
sin
θ=0
(3)
所以当倾斜角 θ太小时 , 测量的分辨率就会太小 , 当
角度足够大时精度才会上升 。所以对一轴倾斜角传感器 的运用是 :把它的传感方向与重力加速度方向垂直时的
间时 , F(θz )>(2/ 2)g , 反之 F(θz)<(2/ 2)g , 这里以 F(θz )的值作为划分档次的依据 。在一档中 F(θx),F(θy ) 的分辨率很高 , 此时相当于运用一个 两轴加速度传感器 测量全方位 , 低摆幅倾斜角 , 运用式(15)可以计算倾斜 角 。在二档中 F(θz )的分辨率都很高 , 此时相当于运用 一个一轴加速度传感器测量全方位 , 高倾斜角度的倾斜 角 , 运用式(1)可以计算倾斜角 。
所以 :
θx =θx′
(13)
sin θy =sin θy′cos θx′
(14)
而传感器实际倾斜角为 :
cos θ=cos θx′cos θy′
= co s2 θx -sin2 θy = cos2 θy -sin2 θx (15)
所以只要得出两轴加速度传感器测量结果 F(θx )和 F(θy)就可以计算出 θx 和 θy , 进而知道总的倾斜度 。
1 倾斜角测量原理
对于轴加速度传感器 , 当它的传感方向和重力加速 度方向一致时 , 假如此时为零倾斜角度 , 设加速度传感器 测量结果为 F(θ), θ为倾斜角度 , g 为重力加速度 , 如图 1 所示 。
F(θ)=gcos θ
(1)
对 F(θ)求导得 : ddFθ=-gsin θ
一种轴角数字转换器的接口设计
5 0
一种轴 角数字转换器 的接 E设计 l
一
种轴角数字转换器的接 口设计
ne fc De in o y c r/ s le — o tr e a sg fa S n hO Re OV r t —Dii l n etr a e n P 1 4 gt Co v re B s d o C a 0
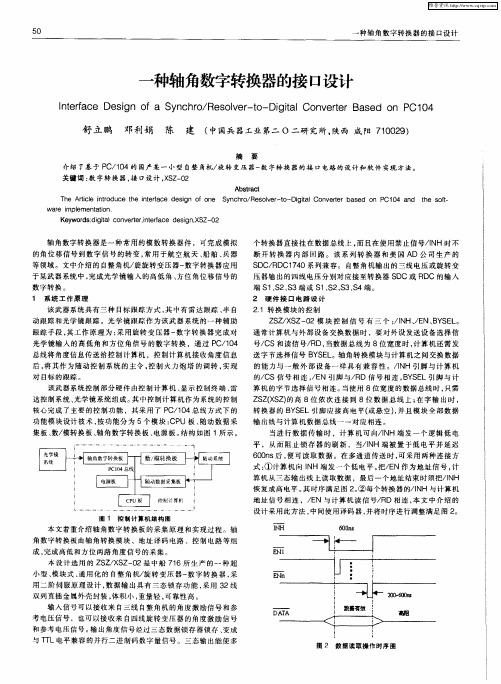
的/ CS信 号 相 连 ,E 引 脚 与 / D 信 号 相 连 ,Y E /N R B S L引 脚 与 计
该 武 器 系 统 控 制 部分 硬件 由控 制计 算 机 、 示 控 制 终 端 、 显 雷
算机的字节选择信号相连。 当使用 8位宽度 的数据总线时 , 只需
达控制系统 、 光学镜系统组成。 中控制计 算机作为系统的控制 其
关键 词 ; 字 转 换 器 , 口设 计 ,S 一 2 数 接 X Z 0
Abs r c ta t
T e Arce it d c h ne f c e in o n S n ho R s l r t - i i l n e e a e n P 4 a d t e s f h t l nr u e t e it r e d sg fo e i o a y c r / e ov - o D g t e a Co v r r b s d o C1 n h o t t 0 — wa e i lme tt n r mp e na i . o K y r sd gt l o v r r ne f c e i nX Z 0 e wo d : ii n e t 。 t r e d sg 。 S 一 2 a c ei a
光学镜 J
系 广 轴数转板I_ /转 板 I 系 统 . 角 牛换 - 1 模 换 - 一 数 _ 统
摆杆控制系统毕业设计
目录1.方案设计与论证 (1)1.1 角度采集方案 (1)1.2 驱动及控制方案 (2)1.3 系统总体方案 (2)2.系统硬件电路设计 (3)2.1 单片机AT89S52 (3)2.2 L298N简介 (4)角度测量原理 (4)2.3.1角度测量原理 (4)2.3.2角度测量算法 (5)2.3.3角度测量电路 (6)2.4直流电磁铁控制模块 (6)2.4.1控制算法............................................................... 错误!未定义书签。
2.4.2控制电路 (6)2.5按键显示 (6)2.6声光提示 (7)3.系统软件设计 (8)主程序流程图 (8)3.2 角度测量子程序流程图 (8)角度控制子程序流程图 (9)4.系统测试 (9)4.1 测试仪器与方法 (9)4.2 角度测量 (10)4.3 测试结果分析 (10)5.结论 (10)参考文献 (12)附录1 硬件电路图 .................................................................... 错误!未定义书签。
附录2 主要元器件清单 ............................................................ 错误!未定义书签。
附录3 程序清单 ........................................................................ 错误!未定义书签。
1.方案设计与论证本题目是设计并制作一个摆杆控制系统,通过电磁控制装置,调节摆杆摆角的大小,如图1.1所示。
图1.1 摆杆控制系统示意图根据题目的要求,本系统所设计的核心问题主要有:1、对直流电磁铁电压大小进行快速而准确的控制,以保证摆杆的摆角和周期在控制范围内。
一种基于模块化仪器的轴角转换器自动测试系统
转角 < 轴器 窭 换
+5 测 试信 号控 制卡 lV
・
电测线 压 压试 档
控 机
l 5V
变压器 一 数字转换器测试 软件 和数字 一自整 角机 / 旋转
变压器转换器测试软件。测试软件主要包括测试项 目选 择功能 、 测试参数选择 功能 、 测试过程控制功能和测试数
输入测 试点
l — f 十一 继电嚣 阵列 f
寸
级
电压 测试 点+
电压 测试 点一
图 2测试信号控制卡电路框 图
速电量 度 压
‘
l
l 数字示波器卡 l ‘
I
轴信 角 号
( 电流量测试 电路 2 1 电流量测试电路用于测试轴 角转换 器的电源 电流 、 数字输入高电平 电流 、 数字输人低 电平 电流 、 输入阻抗等 检测项 目。 电流量测试使用数字万用表卡电流测试档 , 将
电子质量 (02 7 21第0 期)
一种基于模块化仪器的轴角转换器自动测试系统
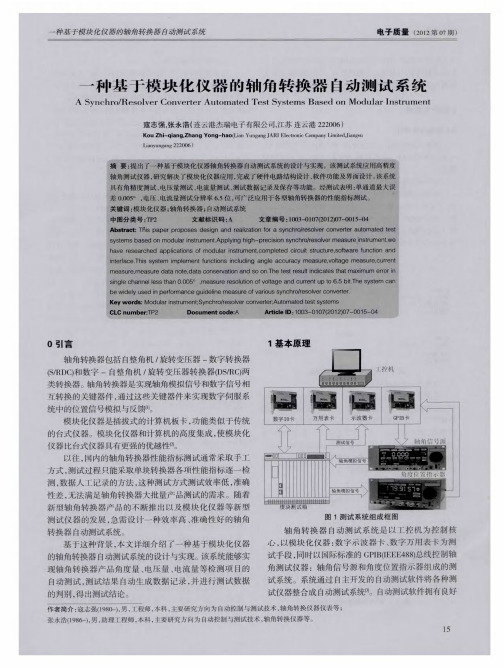
的人机交互界面 ,用户根据测试转换器 的性 能指标选择 相应 的测试项 目, 自动记 录测试数据 , 并依据转换器检测 标准 自动判别测试结果是否合格 。如图 1 所示 。
f 电压量测试 电路 3 1 电压量 测试 电路用于测试轴 角转换 器的电源 电压 、 数字输 出高 电平 电压 、 数字输 出低 电平 电压 、 参考 电压 、 参考频率 、 出电压幅值 、 输 参考输入阻抗等检测项 目。电 压量测试使用数字万用表卡 电压测试 档 ,将需要测试 的
组成。
( 测试信号控制卡 1 ) 测试信号控制卡为轴 角转换器 自动测试 系统专 门设 计, 主要用 于电压量 、 电流量测试 时 , 控制测试信号 的切
高精度自整角机/旋转变压器模拟直流转换器的设计
KE WORDS: y c r / e ov r Vot g ; Y S n h o r s 1 e ; la e Cu r n ; n e so Io ai n re t Co v r in; s lt o
流电压转换器 不适 合 远距 离传 输 的系 统 ,极 大 地 限
制 了它的应用 。 因此 提 出 了一种 以轴角 数 字转 换 技
精度高等优点 ,结合 高精 度 D A 和 v I 换技 术 以 / /变 及信号隔离技术来实现 。总体设计框 图如 图 1 所示 。
0 引 言
自整 角机/ 旋转变压 器作为轴 角测量元 件 ,为 自 动控 制系统 提供 低成 本 、高精 度 的位 置 传感 器 。而 在 工业检测控制领 域 中,往往 需要把 自整 角机/ 转 旋
自整角 机/ 转变压器 信号直 接转换成标 准工业 电流 旋
信 号 4 A ̄2 mA 电流 ,通过 双 绞线 进行 信 号 远距 : m 0
AB T S RAC T:Ba e nt et e r f ih p e iin s n h o r s le odg tl h ih p e iin s do h h o yo g r cso y c r / e o v rt ii ,t eh g r cs h a o
b e e i n d a d m a e b o p e e sv mp o i g h g r c so i i l o a ao o t g , a — e n d sg e n d y c m r h n i e e l y n i h p e ii n d g t n l g v la e a t n
AD2S80 系列分解器数字转换器的特点及应用
AD2S80 系列分解器数字转换器的特点及应用摘要:介绍了AD2S80系列分解器数字转换器的主要特点、技术指标及使用方法,并以AD2S80A为例详细说明了外接元件的选择及有关参数的计算方法。
关键词:跟踪速率高频滤波器相敏检波器1 概述分解器(Resolver)又叫旋转变压器,它和自整角机(也叫同步器)都是角位移传感器,用来测量旋转物体的转轴角位移和角速度。
分解器数字转换器(缩写为RDC)是一种特殊的模数转换器(ADC),它采用比值跟踪的转换方式,专门用于将分解器的角位移信号转换成相应的二进制数字信号,以便计算机系统能够进行相应的数字运算。
它是计算机系统理想的专用接口器件。
AD2S80系列RDC是美国模拟器件公司(Analog Devices Inc )生产的RDC产品中的一部分。
AD2S80系列包括AD2S80A,AD2S81A,AD2S82A,AD2S83等产品。
以下介绍它们的主要特点和技术指标及使用方法。
2 AD2S80系列RDC的主要特点和技术指标AD2S80系列RDC的共同特点:²单片结构,具有尺寸小、性能稳定等优点。
²线路结构相同,芯片内含有输入缓冲器、分段开关、R 2R梯形网络数模转换器、可逆计数器、相敏检波器、积分器、压控振荡器(VCO)、数据转换逻辑电路,输出数据锁存器及输出缓冲器等,原理框图如图1所示。
图1 AD2S80系列的原理框图及外围器件基本接线图²与外界的接线方法,外接器件参数计算方法及使用方法都完全相同。
²采用BiMOS工艺,兼有CMOS逻辑电路的优点及采用高精度的线性电路。
因此,AD2S80系列的RDC产品具有精度高、长期稳定性好、可靠性高等优点。
²都具有速度传感的输出电压,它与RDC的输入转角变化速率成正比,其线性度为1%。
²由用户选择动态性能。
通过外接电阻和电容的不同选择,可得到不同的带宽和跟踪速率及RDC转换器速度输出的比例值。
汽车自动变速器输出轴角加速度检测通道的设计与实现
常见故 障之一 。造成汽车振动的原 因主要有两类 : ① 外部原因 , 主要是来 自变速器装配误差 ; 内部原因, ②
主要 是 换 档 不平 顺 , 在 冲击 , 致 换 档 时 汽 车 冲击 存 导 振 动 。对 变 速 器输 出轴 角 加 速 度 进 行 检测 是 故 障判 断 的一 个 重要 依 据 , 果换 档 过 程 比较 比较 平 顺 , 如 加
第8 期
董 铸荣 , : 等 汽车 自动变速器输 出轴角加速度检测 通道 的设计与实现
・8 1 ・ 9
速 度 比较 小 , 可 排 除换 档 存 在 冲击 的 可 能 , 果 换 则 如 档 时 变 速 器 角加 速 度 比较 大 , 随 汽 车振 动 , 可 初 伴 则
步 判 断 换 档 工 况 存 在 异 常 , 要 对 自动 变 速 器 电磁 需 阀、 油路 等进 行进 一步 检查 。
d t s a q i d b a s o e c e t ag rt mi r g a wa n lz d a d c mp r d w t ac lt n r s l fMal b T e r s h aa wa c u r y me n fb n h ts , lo i e h c p o r m s a ay e n o a e i c lu ai e u t o t . h e u s h o s a i d c t h tb t h ot r n a d r e i n o e d tc in c a n lh v o d r a — i t i u ea d a c r c . n ia et a o h t e s f wa e a d h r wa ed sg ft ee t h n e a e g o e l t h o me at b t n e u a y r
寻北仪系统中旋转变压器-数字转换电路的设计
寻北仪系统中旋转变压器/数字转换电路的设计1 引言寻北仪在军事和民用领域都有广泛应用,它可以测出载体纵轴与真北的夹角,为飞机、船舶等提供方位基准。
寻北仪系统中采用旋转变压器作为方位角测量元件,因此必须设计旋转变压器模拟量-数字量转换电路来实现方位角测量。
传统的由分立元件组成的转换电路结构复杂,可靠性低,取而代之的是集成化的轴角/数字转换模块。
本文介绍了一种实用的轴角/数字转换器16XSZ2412-01 及其在寻北仪系统中的应用。
2 工作原理及引脚功能江苏自动化研究所研发的16XSZ2412-0l 是一种超小型化、采用跟踪转换技术的旋转变压器/数字转换器,它应用了二阶伺服回路,且在数字输出端包含三态锁存器。
输入信号可以来自四线旋转变压器信号和参考。
输出是经三态锁存器、与TTL 电平兼容的并行自然二进制码数字量。
三态输出能使多个转换器直接挂在数据总线上,而且在使用禁止信号INH 时不断开转换器内部回路。
字节选择信号BYSEL 的设置极大方便了数据总线宽度为8 bit 的用户。
用户可以在8 bit 宽的总线上得到16 bit 字长的数据,而无需外部接线。
16XSZ2412-01 转换器的引脚排列如(1)直流供电引脚:包括+5V、GND、+15 V、-15V 四个引脚。
直流电源的波动范围为±10%。
建议在电路板的+5 V、+15 V、-15 V 到GND 之间分别并联一个0.1μF 和一个6.8μF 的滤波电容。
(2)CASE 端:与外壳相通,使用时需将该端接机壳地。
(3)输入模拟信号引脚:旋转变压器引线端D1、D2 及Z1、Z2、Z3、Z4。
基于RD-19230的自整角机接口电路设计
将 机械 转 角 或 直 线位 移 精 确 地 转 化 成 电信 号 。它是 自动 控 制 系 统 中 的 同 步元 件 . 用 两 台或 多 台 自整 角 机 在 电 路 上 的 联 利 系 , 以使 相 隔 一 定 距 离 、 械 上 互 不 连 接 的两 根 或 多根 转 可 机 轴 保 持 同步 旋 转 或产 生 相 同的 转 角变 化 。
第 1 9卷 第 6期
V0 .9 11 No 6 .
电 子 设 计 工 程
Elcr ni sg gn e i g e to cDe in En ie rn
2 1 年 3月 01
Ma . 01l r2
基于 R 1 2 0的 自整 角机接 口电路设计 D一 9 3
吕云 峰 ,罗 明 西 , 华 强 何
自整 角 机 是 一 种 感 应 式 的 微 电 机 , 利 用 电 磁 感 应 原 理 它
机 . 自整 角 机 和 伺 服 机 构 组 成 的 随 动 系 统 中 , 发 送 轴 或 在 与 主动 轴 耦 合 的 自整角 机 称 为 发 送 机 , 接 受 轴或 被 动 轴 耦 合 与
的 的 自整角 机 称 为 接收 机阁 。
转 化 为数 字 角度 信 号 . 绍 了 自整 角机 的 基 本 原理 , 计 了 R 一 9 3 介 设 D 1 2 0与 自整 角机 的接 口 电路 。 测试 证 明 , 电路 的 该
设 计 方 法可 靠 性 好 , 度 高 , 干扰 能 力 强 , 够 完全 满足 高速 自整 角机 控 制 系统 的 要 求 。 精 抗 能
( 中船 重 _ T -第 7 9研 究 所 , 北 武 汉 4 0 7 ) 0 湖 30 4 摘 要 :自整 角机 是 一 种 被 广 泛 应 用 的微 控 制 电机 , 既 能作 为 传 感 器测 量 远 距 离机 械 装 置 的 角度 位 置 , 可 以控 制 它 也
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于自整角机数字转换器SDC1742的轴角检测电路设计
摘要:本文介绍了高精度自整角机数字转换器SDC1742模块的主要特点和工作原理,并给出了该模块在轴角检测电路中的软硬件设计,实现了将三相模拟信号转换成数字信号的功能。
关键词:数字转换器SDC1742 检测自整角机
自整角机是一种能对角位移或角速度的偏差自动整步的感应式控制电机,自整角机被广泛应用于随动控制系统中。
自整角机数字转换器(又称为同步机数字转换器,Synchro Digital Converter,SDC)用于将自整角机发出的对应于旋转角度或角速度的模拟电压信号转换成数字信号输出。
SDC专用芯片的产生,改变了自整角机的应用形式。
SDC专用芯片产生之前,需要两台自整角机配合使用,然后输出与自整角机失调角对应的电压。
SDC专用芯片产生之后,只需要一台自整角机。
自整角机的励磁绕组的引线、三相整步绕组的引线都直接接入SDC专用芯片,该芯片就会输出偏离电气零位的角度的数字信息。
1 工作原理及引脚功能
SDC1742是一款混合式12位连续跟踪自整角机数字转换器。
在这款混合器件的内核中,转换过程由基于ADI专有BiMOS II工艺制成的一个单芯片IC完成,在同一芯片中有机地结合了CMOS逻辑和双极性高精度线性电路的优势。
通过内部隔离微变压器实现信号与基准电压输入之间的真正隔离。
12位数字字采用三态数字形式,由2个字节
构成。
通过最高有效8位和最低有效4位分别配置ENABLE输入,不但简化了将一个器件以多路复用方式连接至单个数据总线的过程,同时为INHIBIT输入提供了支持,无需中断跟踪环路的操作。
上电后,SDC1742芯片内部模块处于工作状态,接收自整角机励磁绕组和整步绕组的交流信号输入,在芯片内部转变成为正弦信号和余弦信号,输入数字转换器进行转换后送入输出锁存器,进而送到输出引脚。
模块并行输出的12位数码随着自整角机轴的旋转而发生变化。
在数字转换完成后,BUSY端送出低电平,表示SDC输出的数字码有效,允许单片机或DSP等器件将数字码取走。
SDC1742的分辨率为12位,最小可以分辨的角度为0.088°;误差最大值±0.142°;跟踪速度大于18r/min;信号参考频率400Hz;输入信号电平90V,26V,11.8V;参考信号电平11.8V,26V,115V;电源电平:±15V/35mA,逻辑电平5V/56mA;功耗1.4W。
SDC1742的引脚见图1。
常用引脚及功能如下:1-14引脚——BIT1~BIT14并口数据输出;SDC1742这款芯片只用到1-12引脚,BIT1~BIT8对应高8位,BIT9~BIT12对应低4位。
最高位BIT1的权重为180°,最低位BIT12的权重为0.0879°。
15,16引脚——参考信号输入,即自整角机励磁绕组信号输入,最大值±350V。
18~20引脚——自整角机整步绕组信号输入,最大值±350V。
25,26引脚——决定输出数据的状态,高电平“1”时,输出数据保持在高阻状态,对外截止。
低电平“0”时,允许输出锁存器中的数据传送到输出的引脚上。
/ENABLE L允许低4位数据输出/ENABLE M允许高8位数据输出。
27引脚——模块输出的忙脉冲信号,它为逻辑高电平时,对轴角变化量进行数字跟踪,这时输出数据无效,逻辑低电平时,允许数据输出,这时输出数据有效。
28引脚——禁止锁存数字转换器数据,低电平有效,禁止输出锁存器的更新。
释放该信号将自动产生一个BUSY信号,表示忙于刷新输出锁存器,此时不可读取数据。
29,31引脚——正负电源,±15V。
30引脚——电源地。
32引脚——逻辑电源,+5V。
芯片电源入口处应对地并联两个退藕电容,退藕电容的推荐值为 6.8μF和0.1μF。
图2是SDC1740模块与自整角机接线的示意图。
SDC的输入端直接与自整角机的励磁信号和三路整步绕组输出信号相连接,SDC的输出端为与自整角机轴角相对应的数字量,可以直接与单片机接口。
因此,SDC模块相当于A/D转换器,可以作为单片机的一个外设,利用它能够很方便地实现轴角检测的数字化处理。
2 轴角检测电路
SDC1742与ATmega16单片机接口的硬件电路如图3所示。
ATmega16单片机的PD2(INT0)脚与状态信号引脚BUSY,采用外部中断的方式确定模块转换数据是否有效完成。
在进行数据连接时,考虑到该转换器具有数据锁存功能,所以可直接将数据高8位BIT1~BIT8
和数据低4位BIT9~BIT12分别与单片机PC口相接,无需另加锁存器。
将控制信号引脚/INH、/ENM、/ENL分别与PA0、PA1、PA2相连, 按数据读取控制时序改变这3个管脚的状态,即可得到转换器中锁存的有效数据。
由图2可知,SDC1742的S1、S2、S3端,接自整角机三相交流信号;REFERENCE LO、REFERENCE HI 接激磁电压26v。
自整角机输出的转轴角度信号,经SDC1742转换器变换成二进制码,输入单片机ATmega16,通过前后数据的对比计算,即可得到角度的变化。
数据采集程序如下
#include<avr/io.h>
#include<avr/interrupt.h>
#define unchar unsigned char
#define unint unsigned int
unchar H8,L4
void main()
{
DDRA=0xFF; PORTA=0xFF; // PA端口设置为输出DDRC=0x00;PORTC=0xFF; // PC端口设置为输入MCUCR=0x20;// INT0为下降沿触发
GICR=0x40; // INT0中断使能
SREG=0x80; // 总中断使能
while(1)
{
..........
}
}
ISR(INT0_vect)
{
PORTA=0xFC; // 设置端口,读取高8位数据
H8=PINC;
PORTA=0xFA; // 设置端口,读取低4位数据
L4=PINC;
L4=L4&0xF0;
............
}
3 结语
本文介绍了一种高精度自整角机模/数转换器SDC1742芯片的主要特点、工作原理,探讨了其在转轴角度检测中的应用,设计了与A VR 单片机的接口电路并给出出数据采集程序。
实验证明,软硬件设计合理可行,系统工作稳定可靠,实现了将三相模拟信号转换成数字信号的功能。
参考文献
[1]AnalogDevices公司.SDC1742产品数据手册,2008.
[2]海涛.ATmega系列单片机原理及应用[M].北京:机械工业出版社,2008.
[3]赵君有,张爱军.控制电机[M].北京:中国水利水电出版社,2006.。