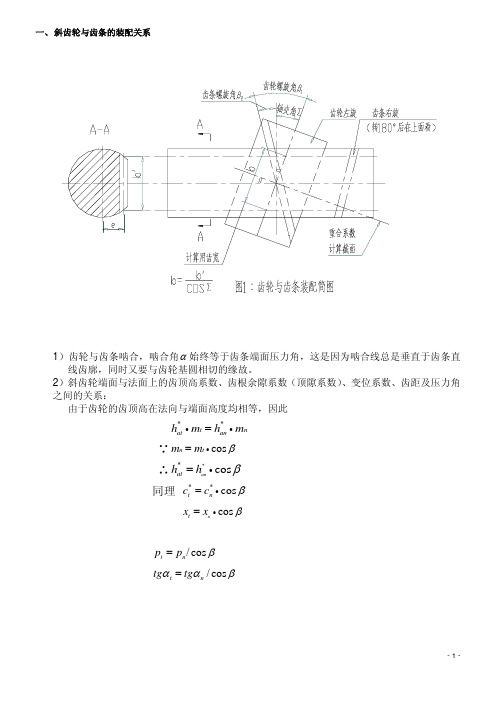
齿轮齿条选型计算
齿轮齿条各项参数计算

名称齿轮齿条各项参数计算齿轮齿条备注预先给定的参数线角传动比中心距安装角法向压力角法向变位系数法向齿顶高系数法向顶隙系数i m n z1 / cos 2df 1a=+m n X n1 +enXn1h an*1c n*(0.25或0.3)由用户给定由用户给定由用户给定综合考虑后确定综合考虑后确定建议选 0.3法向模数齿数齿条行程螺旋角(旋向)m nz(与 i 有关)z2(按行程确定)1L由用户给定计算参数(左旋)22(右旋 )(与i有关 )1分度圆直径齿顶高全齿高工作齿高齿顶圆直径齿根圆直径法向齿距端面齿距分度圆柱上螺旋线导程基圆直径分度圆柱上法向弧齿厚法向公法线长度d1m n z1cos 1h mn(h*Xn1)hm h*a1n1 a 2n an 2h m (h*h*c*)h m (h*h*c*)1n an1an 2n2n an1an 2nh m n (h an*1 h an*2 )d a1 =d f 1 +2 h1df 1da12h1p n m np =p npt 2=p nt1cos1cos2T m t z1tan(90)d b =d1 cos t 1s n1 =m n2m n X n1 tan n2t1 =tan W m cosn(n0.5) z invt12 X m sinntan1n n1ncosn1跨测齿数齿顶圆上端面弧齿厚齿顶圆上法向弧齿厚z'11+2X n122X n1invn=2n1tan n 1inv n1 +0.5z'=z t 1 cos z'cosz'inv n1n sat1=st1da1da1 inv at1inv t1cos at1 =db1d d a11)s=m2h tansan> 1mm san1=sat1cos1nnan 22 a 2认为未变尖。
齿轮齿条的计算
n an t at m h m h ••=**∵βcos •=t n m m∴βcos **•=an h h at同理 βcos **•=n t c cβcos •=n x x tβcos /n t p p =βααcos /n t tg tg =二、 齿轮齿条几何参数计算三、 BISHOP 评价齿轮齿条啮合副的指标 1、重合系数总ε>22、齿轮和齿条的齿顶厚(齿轮法向弧齿厚,对于齿条则是法向弦齿厚) mm na s 11>3、齿条齿根尖端半径 R >0.55mm4、齿轮中心到齿条齿顶的距离b>根切极限半径r u 。
根切极限半径按下式计算, c r r t b u+=αcos式中 t b r r αcos 1=b r — 基圆半径1r — 分度圆半径t α— 分度圆上端面压力角c—最小齿顶隙(c=0.25mn)合度的增量βε,即为总的重合度总ε。
()()n t n an t et m b x h z ••+⎥⎦⎤⎢⎣⎡−+−=πβαβααπε1111*2111sin 2sin cos 4tan tan 21总 式中:111cos at bt r r at =α备注:① 齿轮齿条相同齿顶高系数:齿轮: 齿条:()1*1n an n a x h m h += *2an n a h m h •=()*1*1nn an nf C x hm h +−= ()**2nan n f C h m h +=()**12nan n C h m h += ()**22n annC h m h +=② 齿轮齿条不同齿顶高系数:齿轮: 齿条:()1*11n an n a x h m h += *22an n a h m h •=()*1*21nn an nf C x h m h +−= ()**12nan n f C h m h +=()**2*11n an an nC h hm h ++=()**2*12nan an nC h hm h ++=。
标准齿条选型计算方法

标准齿条选型计算方法小伙伴们!今天咱们来唠唠标准齿条的选型计算方法,这可没那么复杂,就像挑衣服一样,有几个小要点呢。
咱先得知道负载情况。
这就好比你要背个包,得知道包里装多少东西,重不重。
要是负载大呢,那对齿条的要求肯定就高啦。
你得考虑这个力有多大,是持续的力,还是偶尔来那么一下的力。
如果是持续的大力,那可不能选个弱不禁风的齿条呀。
再说说速度要求。
这就像你走路和跑步,速度不一样,鞋的选择也会不同呢。
如果要求齿条快速运转,那它的精度、材质等方面都得能跟得上这个速度才行。
比如说,速度快的时候,齿条的齿面磨损可能就会快一些,那我们就得选耐磨性好的材质,像一些特殊的合金钢之类的。
还有传动比这个事儿。
这就像自行车的齿轮,大齿轮转一圈小齿轮转好几圈,它们之间有个比例关系。
在齿条的世界里,传动比也很重要哦。
它会影响到整个传动系统的效率和精度。
你得根据你的设备整体的传动需求来确定这个传动比,然后再去选合适的齿条。
精度等级也不能忽视呀。
这就像考试的分数,精度等级越高,说明这个齿条越精准。
如果你的设备是那种对精度要求极高的,像精密仪器之类的,那肯定得选高精度等级的齿条。
要是精度不够,就好比考试粗心大意,那做出来的东西可就不完美啦。
另外呢,安装空间也得考虑进去。
就像你布置自己的小房间,空间有限,你得选个大小合适的东西放进去。
如果安装空间小,那你就得找小巧一点但功能又能满足要求的齿条。
总之呢,标准齿条选型计算不是什么特别神秘的事儿。
你就把这些因素都综合起来考虑,像照顾自己的小宠物一样,每个方面都照顾到,就能选到合适的标准齿条啦。
希望小伙伴们下次遇到这个事儿的时候,心里都有个谱儿,可别抓瞎哦。
。
电机减速器齿轮齿条计算
电机减速器齿轮齿条计算
电机减速器齿轮齿条的计算涉及多个因素,包括齿轮和齿条的模数、齿数、减速比等。
以下是一些基本的计算步骤和公式:
确定减速比:减速比是指电机转速与齿轮齿条输出转速之比。
可以通过改变齿轮齿条的齿数比来调整减速比。
计算齿轮模数:模数是齿轮的一个基本参数,它决定了齿轮的尺寸和强度。
模数可以通过以下公式计算:模数 = 齿轮分度圆直径 / (齿数 + 2)。
计算齿条模数:与齿轮模数类似,齿条也有模数。
齿条的模数与齿轮的模数相同,可以通过以下公式计算:齿条模数 = 齿条分度线长度 / (齿数 - 1)。
计算齿轮和齿条的实际参数:根据上述步骤计算出的模数和其他已知参数(如齿数、压力角等),可以进一步计算齿轮和齿条的其他实际参数,如分度圆直径、齿高、基圆直径等。
齿轮齿条传动计算
齿轮齿条传动计算齿轮齿条传动是一种常用的机械传动方式,它通过齿轮与齿条上的齿条相互嵌合,实现力的传递与转动的变换。
在进行齿轮齿条传动计算时,我们主要需要考虑以下几个方面:齿变型、齿面接触应力、传动效率和齿轮齿条的选择等。
首先,我们需要进行齿变型的计算。
齿轮齿条传动的基本参数包括齿数、齿距、齿宽、模数等。
在计算齿变型时,我们需要根据齿轮齿条的几何形状参数,使用齿轮齿条传动的计算公式进行计算。
其中,齿变型的计算公式主要包括变位系数、齿顶高系数、齿根高系数和整体齿高等。
其次,我们需要进行齿面接触应力的计算。
齿面接触应力是指齿轮与齿条接触点的应力大小。
在计算齿面接触应力时,我们需要考虑齿轮与齿条的接触变形、接触应力分布等因素。
一般来说,齿轮与齿条的接触应力应满足一定的强度要求,以确保传动系统的安全稳定运行。
然后,我们还需考虑传动效率的计算。
传动效率是指齿轮齿条传动过程中能量损失的比例,它直接影响到传动系统的能量转换效率。
在计算传动效率时,我们需要考虑传动的摩擦损失、合理的传动比和正确的润滑方式等因素。
通常情况下,我们可以使用齿轮齿条传动的效率计算公式进行计算。
最后,我们需要选择合适的齿轮齿条。
在进行齿轮齿条传动计算前,我们需要根据实际应用需求选择合适的齿轮齿条。
一般来说,我们需要根据传动功率、转速、传动比等参数,选择适当的齿轮齿条类型。
值得注意的是,齿轮齿条的选取应满足传动要求,并考虑到使用寿命、运行稳定性、制造成本和维护方便等因素。
总结起来,齿轮齿条传动计算主要包括齿变型、齿面接触应力、传动效率和齿轮齿条的选择等方面。
通过精确的计算,我们可以对齿轮齿条传动进行参数优化设计,以实现机械传动的高效性和可靠性。
齿轮齿条移动距离计算公式

齿轮齿条移动距离计算公式
齿轮齿条移动距离计算公式是机械领域中常用的公式之一。
它可以帮助我们计算齿轮齿条在运动过程中的移动距离,从而确定机械装置的运动状态。
齿轮齿条移动距离计算公式为:
S = π * d * N
其中,S表示齿轮齿条的移动距离,d表示齿轮的直径,N表示齿轮转动的圈数。
在实际应用中,我们可以根据不同的情况选择合适的单位来表示移动距离和齿轮直径,比如厘米、毫米、英寸等。
需要注意的是,在使用齿轮齿条移动距离计算公式时,我们还需要考虑齿轮齿条之间的传动比例。
如果齿轮与齿条的传动比例不同,则需要根据实际情况进行调整计算。
除了齿轮齿条移动距离计算公式外,机械领域中还有许多其他常用的公式,比如速度公式、力学公式等,它们都是机械设计和制造中不可或缺的工具。
- 1 -。
齿轮齿条计算
齿轮齿条计算齿轮和齿条是机械传动中常用的两种传动方式,它们之间的配合合理与否直接影响到机械传动的效率和性能。
本文将从齿轮齿条的基本原理、设计计算方法以及注意事项等方面进行详细介绍,旨在帮助读者深入了解齿轮齿条的计算方法,并指导实际应用。
一、齿轮齿条的基本原理1.齿轮的基本原理齿轮是由一对或多对齿数不同的圆盘组成的,通过齿的啮合来实现转动和传动。
它具有传递扭矩和改变速度比的作用。
2.齿条的基本原理齿条是一种线性运动的传动装置,由具有一定齿数的直条状齿轮构成。
齿条通过与齿轮的啮合实现力的传递和工件的移动。
二、齿轮齿条的设计计算方法1.齿轮设计计算方法(1)确定传动比:根据所需的转速比和传动功率,选择合适的齿轮组合。
(2)计算模数:通过传动功率和转速来确定齿轮的模数。
(3)计算齿数:根据齿轮的模数和传动比,计算齿轮的齿数。
(4)计算齿轮尺寸:根据齿数和模数,计算齿轮的直径、齿宽等尺寸。
2.齿条设计计算方法(1)确定齿条的模数:根据工作载荷和所需的尺寸精度,选择合适的齿条模数。
(2)计算齿条的齿数:根据齿条的模数和长度,计算齿条的齿数。
(3)计算齿条的尺寸:根据齿数和模数,计算齿条的宽度、高度等尺寸。
三、齿轮齿条计算的注意事项1.合理设计齿轮齿条的啮合角和啮合线速度,避免啮合不良和过高的载荷。
2.设计时要考虑齿轮齿条的工作环境和要求,选择合适的材料和表面处理方式,以提高其使用寿命和性能。
3.在实际应用中,要注意齿轮齿条的润滑和保养,定期检查和更换磨损严重的齿轮齿条部件。
齿轮齿条作为机械传动中常用的方式之一,其设计计算方法的合理与否对传动效率和性能有着直接的影响。
通过本文的介绍,读者不仅可以全面了解齿轮齿条的基本原理和设计计算方法,还能掌握齿轮齿条计算的注意事项,有助于在实际应用中对齿轮齿条进行准确的计算和选用,以提高机械传动的效率和使用寿命。
齿轮齿条传动设计计算
齿轮齿条传动设计计算齿轮齿条传动是常见的机械传动方式之一,也是用于传递轴间转矩和转速的重要装置。
它由齿条和与之啮合的齿轮组成,通过轮齿的啮合来实现转动。
在进行齿轮齿条传动设计计算时,需要考虑传动的功率、转速、轴间距、齿轮模数、齿数等参数。
首先,我们需要确定齿轮齿条传动的功率需求。
根据所传递的功率来选择合适数值的齿轮和齿条,一般要保证所选的齿轮和齿条具有足够的强度和耐磨性。
其次,需要确定齿轮齿条传动的转速比。
转速比通常由所需输出转速和输入转速决定。
转速比的确定直接影响到齿轮和齿条的齿数选择。
一般来说,较大的转速比要求较小的齿轮齿数,从而需要较高的精度。
接着,根据齿轮齿条传动的转速要求和功率需求,可以计算出所需的模数。
模数直接影响齿轮的尺寸和结构,因此需要根据实际情况进行调整。
一般来说,所需的模数越大,齿轮尺寸越大,传动愈稳定。
然后,需要确定齿轮齿条传动的齿数选择。
齿数的选择需要考虑齿轮和齿条的啮合配合、齿间间隙等因素。
齿数的选择需要满足一定条件,例如,齿数尽量要求是素数,以避免齿轮和齿条存在重复齿面时的震动和噪音。
最后,需要进行齿轮和齿条的轴间距计算。
轴间距直接影响齿轮和齿条的结构和性能,所以需要根据实际情况进行调整。
轴间距的计算需要考虑齿轮和齿条的尺寸、模数等因素。
在进行齿轮齿条传动设计计算时,需要根据实际情况进行合理选择和调整。
为了提高齿轮齿条传动的性能和寿命,还需要考虑选用合适的材料、表面处理等措施。
总结起来,齿轮齿条传动设计计算涉及到传动功率、转速比、模数、齿数和轴间距等参数。
在进行计算时,需要根据实际需求来选择合适的数值,并结合材料、结构、加工工艺等因素进行综合考虑,以确保齿轮齿条传动的稳定性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
齿轮齿条选型计算
齿轮齿条计算选型(仅供参考)
一、设计要求
直线速度V=120m/min 、nmotor=4500rpm、加速时间200ms 、冲击因素系数fs=1.25(2000次/每小时)
移动部件重量m=460Kg、摩擦系数µ=0.15、齿轮-齿条啮合系数η=95% 水平双边驱动
工况按间歇工作制S5来计算,
二、切向力计算及齿条选型(折算到单侧):
加速度a=9.8m/s2
摩擦系数µ=0.15
效率:η=95%
移动部件重量m=230Kg(折算到单侧)
摩擦力 f=µmg=0.15*230*9.8=338N
加速力 F加速=ma=230*9.8=2254N
加速时总的驱动力F=(F加速+f)/η=2600N
考虑冲击因素F总=F*fs* =2600*1.25=3250N(最大切向力) 根据alpha-
rack&pinion 技术资料的数据:
系统TP050、M3、Z=31、F2T=12442N(切向力)、T2B=500(加速扭矩),系统
TP025、M2、Z=40、F2T=5891N、T2B=250Nm 可选用alpha PREMUM(5级)模数3或模数2的齿条。
alpha PREMUM(5级)齿条齿间误差fp:0.003mm,累计误差Fp:0.012mm(500mm 长)。
三、小齿轮、齿轮箱选型
1、小齿轮
根据alpha-rack&pinion技术资料的数据
选小齿轮为 M3、Z=31个齿,节圆半径R=49.35mm 选小齿轮为 M2、Z=40个齿,节圆半径R=42.45mm 2、齿轮箱
a、 M3、Z=31个齿,节圆半径R=49.35mm
折算到齿轮箱的最大输出扭矩T=F总*R=3250*49.35/1000=160Nm (加速力矩)
b、 M2、Z=40个齿,节圆半径R=42.45mm
折算到齿轮箱的最大输出扭矩T=F总*R=3250*42.45/1000=138Nm (加速力矩根据 alpha-rack&pinion 技术资料的数据
M3、Z=31,T2B=500Nm (实际为T=160Nm)
M2、Z=40,T2B=250Nm (实际为T=138Nm)
3、速比
电机的转速nmotor=4500rpm,直线速度V=120m/min,
a、 M3、Z=31个齿,节圆半径R=49.35mm
减速箱转速n2 =V/(2R*3.14 /1000 )
=120/(2*49.35*3.14/1000)
=387
速比 I=nmotor/n2 = 4500/387=11,取I=10
{I=10,R=49.35mm,n1=4500rpm ,V=(4500/10)*2*49.35*3.14/1000=
139.5m/min}
b、 M2、Z=40个齿,节圆半径R=42.45mm
减速箱转速n2 =V/(2R*3.14 /1000 )
=120/(2*42.45*3.14/1000)
=450
速比 I=nmotor/n2 = 4500/450=10
{I=10,R=42.45mm,n1=4500rpm ,V=(4500/10)*2*42.45*3.14/1000= 128m/min}
4、齿轮箱背隙与小齿轮-齿条间隙对传动系统定位精度的影响
a、 M3、Z=31个齿,节圆半径R=49.35mm
齿轮箱背隙/定位精度 =2R*3.14/360/60
=2*49.35/360/60
=0.014mm/arcmin
b、 M2、Z=40个齿,节圆半径R=42.45mm
齿轮箱背隙引起的误差 =2R*3.14/360/60
=2*42.45*3.14/360/60
=0.012mm/arcmin c、小齿轮-齿条间隙
小齿轮-齿条间隙调整为0.01mm+齿条齿间误差,0.01mm+0.003mm=0.013mm
齿条累计误差可通过校准仪消除
d、传动系统定位精度
1、M3、Z=31个齿,节圆半径R=49.35mm
(齿轮箱背隙引起的误差)+(小齿轮-齿条间隙)
=0.014mm/arcmin*jt(背隙)+(0.01mm+0.003mm)
=0.014mm+(0.01mm+0.003mm)( 齿轮箱背隙1弧分)
=0.027mm( 齿轮箱背隙1弧分)
2、M2、Z=40个齿,节圆半径R=42.45mm
(齿轮箱背隙引起的误差)+(小齿轮-齿条间隙)
=0.012mm/arcmin*jt(背隙)+(0.01mm+0.003mm)
=0.012mm+(0.01mm+0.003mm)( 齿轮箱背隙1弧分)
=0.025mm( 齿轮箱背隙1弧分
四、结论
1、 M3、Z=31个齿,节圆半径R=49.35mm、齿轮箱TP050S /I=10
V=140m/min,
加速度5G
G=(F2T*η/fs-µmg)/m/9.8=(12442*0.95/1.25-0.15*175*9.8)/9.8=5 定位精度小于0.03mm
2、 M2、Z=40个齿,节圆半径R=42.45mm、齿轮箱TP025S/ I=10
V=128m/min
加速度2.5G
G=(F2T*η/fs-µmg)/m/9.8=(5891*0.95/1.25-0.15*175*9.8)/9.8=2.5 定位精度小于0.03mm。