汇川机器人modbus从机地址表HMI_20180117(市场版)
汇川HMI培训

“EOH Setup (设置工程首显的页面)” 单击“EOH Setup” ,会显示如下对话框,可以设置工程运行时首先显示的页面。 设置完之后重新上电才生效。
Innovation+ Advance
三、新建简单的工程
在开始编写程序前,先介绍一下InoTouch Editor 软件的布局。 InoTouch Editor 软件打开后的结构布局如下图所示。
“History(历史资料)”的设定: 单击“History” ,将会出现如下图所示画面。
Innovation+ Advance
“Backlight (背光灯)”的设定 单击“Backlight” ,会显示如下对话框,在此可以调整背光的亮度。 当用手指(或者鼠标)往左滑动这个滑块时,LCD 的背光亮度会变暗;当用手指( 或鼠标)往右滑动这个滑块时,LCD 的背光亮度会变亮。 或者单击“-” ,LCD 的背 光亮度会变暗;单击“+” LCD 的背光亮度会变亮。 单击页面上的“0°”、“90°” 、“180°”和“270°”可以让屏幕旋转您选择的角度。
Innovation+ Advance
步骤3:点击“启动穿透通信”,开始进行通讯。穿透工具里的COM 口号与PLC 通讯 的COM 口号要一致。
步骤4:完成上述操作后,HMI 状态显示“HMI 已连接”如下图所示,可对HMI 及PLC 进行 上传下载功能。 注意:如果使用以太网连接中,对方IP 下有路由器分流后连接触摸屏的,VSVComVCPP 软件中以太网地址仍为远端IP 地址,路由器下面的HMI 要在路由器中开放端口5000 作为 HMI 通讯的端口进行穿透。
选择“位状态切换开关”双击或单击鼠标右键选择“属性”进行编辑,如下图:
S7_1200PLC与四轴机器人MODBUS_TCP通讯
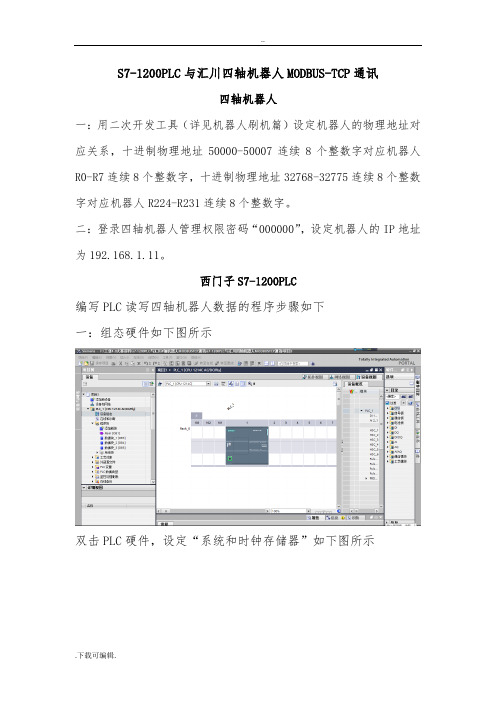
S7-1200PLC与汇川四轴机器人MODBUS-TCP通讯
四轴机器人
一:用二次开发工具(详见机器人刷机篇)设定机器人的物理地址对应关系,十进制物理地址50000-50007连续8个整数字对应机器人R0-R7连续8个整数字,十进制物理地址32768-32775连续8个整数字对应机器人R224-R231连续8个整数字。
二:登录四轴机器人管理权限密码“000000”,设定机器人的IP地址为192.168.1.11。
西门子S7-1200PLC
编写PLC读写四轴机器人数据的程序步骤如下
一:组态硬件如下图所示
双击PLC硬件,设定“系统和时钟存储器”如下图所示
二:添加新数据块1如下图所示:
右键数据块→属性→属性→去掉“优化的块访问”的“√”,如下图所示
同理,新建数据块2如下图所示
三:编写程序如下图所示
选择通信→其他→MODBUS-TCP→MB_CLIENT(通过PROFINET通讯,作为Modbus TCP客户端。
填写各参数后编程如下所示
读取机器人物理地址50000-50007(R0-R7)连续8个整数字的数据,存放到PLC变量DB3.DBB0开始的连续8个整数字里。
将PLC的变量DB4.DBB0开始的连续8个整数字的数据,写入到机器人的十进制物理地址32768-32775(R224-R231)连续8个整数字。
注意:1:读写指令调用的数据背景块要是同一个数据块,
否则通讯不上。
2:其中CONNECT 参数在之前要先建立数据块
建立数据块3的数据类型为TCON_IP_v4,详细参数如下图所示(详细见编程软件指令帮助)
四:数据监控测试
程序编写完成后下载进PLC,运行变量表,监控数据变化。
带MODBUS功能的RTU寄存器地址列表
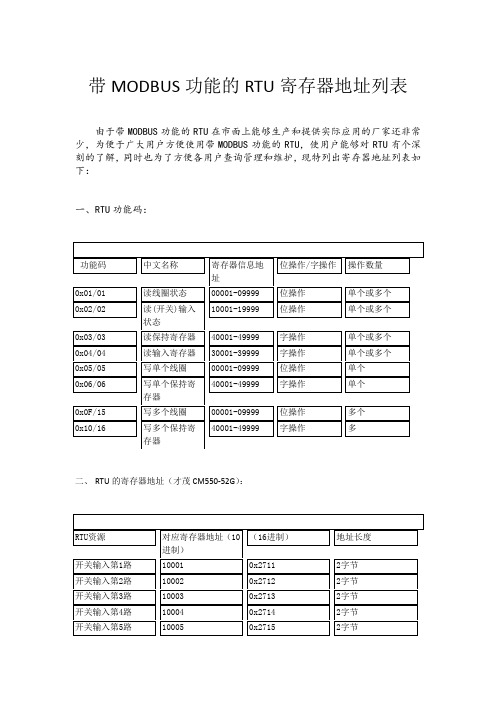
带MODBUS功能的RTU寄存器地址列表由于带MODBUS功能的RTU在市面上能够生产和提供实际应用的厂家还非常少,为便于广大用户方便使用带MODBUS功能的RTU,使用户能够对RTU有个深刻的了解,同时也为了方便各用户查询管理和维护,现特列出寄存器地址列表如下:一、RTU功能码:二、RTU的寄存器地址(才茂CM550-52G):MODBUS 开关输入说明:开关输入对应 MODBUS“读输入离散量”功能码为“02”。
偏置1到8(寄存器地址10进制10001到10008)对应RTU 开关输入通道IO1到IO8。
查询数字输入IO 所有通道(即8 个通道)采集值,命令为: 01 02 00 00 00 08 XX XXRTU的IO接口:MODBUS 读保存寄存器(读保存寄存器的实例是计数器,而PWM,数字输出格式一样只是地址和相应的寄存器数目不一样PWM对应首地址的16进行表示是0x002F,1路PWM 2个寄存器 0x002F 代表的是PWM的周期0x0030 代表的是PWM的占空比(值不能大于10进制数100)数字输出对应的首地址16进行表示0x0037,1路数字输出对应2个寄存器 0x0037 代表的是数字输出的高电平低电平方波1- 高电平2- 低电平 3- 方波 0x0038 代表的是数字输出的方波周期(若不是方波则是00 00)计数器对应MODBUS“读保持寄存器”功能码为“03”。
偏置1到6(寄存器地址10进制40001到40025)对应RTU模拟输入通道I03到I08。
查询计数器IO 所有通道(即6通道)采集值,命令为:01 03 00 00 00 18 XX XX 命令解析如下:执行正确返回数据:01 04 18 XX XX XX XX XX XX XX XX。
XX XX。
modbus连接
利用modbus通讯第一:modbus通讯简介STEP 7-Micro/WIN指令库包含为Modbus通讯专门设计预先配置的子程序和中断例行程序,使与Modbus主设备和从站的通讯更加简便。
Modbus从站协议指令可以配置S7-200,将其用作Modbus RTU从站,与Modbus 主设备通讯。
Modbus主设备协议指令可以配置S7-200,将其用作Modbus RTU主设备,与一个或多个Modbus从站通讯。
Modbus指令安装在STEP 7朚icro/WIN指令树的"协议库"文件夹中。
有了这些新指令,您可以将S7-200用作Modbus设备。
当您在程序中加入Modbus 指令时,会在项目中自动增加一个或多个相关子程序。
Modbus主设备协议库有两个版本。
一个版本使用CPU的端口0,另一个则使用CPU的端口1。
端口1协议库的POU名中带有"_P1"(MBUS_CTRL_P1),表示POU使用CPU上的端口1。
在其它方面,这两个Modbus主设备协议库完全一致。
注意:Modbus从站协议库仅支持端口0通讯。
使用Modbus主设备协议的要求:初始化Modbus主设备协议可以为Modbus主设备协议通讯指定专用CPU端口。
当CPU端口被用于Modbus主设备协议通讯时,就无法用于任何其它用途,包括与STEP 7-Micro/WIN通讯。
MBUS_CTRL指令控制将端口0分配给Modbus 协议或PPI。
MBUS_CTRL_P1指令(来自端口1协议库)控制将端口1分配给Modbus主设备协议或PPI。
Modbus主设备协议指令影响与CPU通讯端口中自由端口通讯相关的所有SM位置。
Modbus主设备协议指令使用3个子程序和1个中断例程。
Modbus主设备协议指令要求两个Modbus主设备指令和支持例程有1620个字节的程序空间。
Modbus主设备协议指令的变量要求284个字节的V存储器程序块。
modbus协议教程

在本章主要讲述如何利用软件通过通讯口来操控该系列仪表。
本章内容的掌握需要您具有MODBUS协议的知识储备并且通读了本册其它章节所有内容,对本产品功能和应用概念有较全面了解。
本章内容包括:MODBUS协议简述,通讯应用格式详解,本机的应用细节及参量地址表。
1.1 MODBUS协议简述ACRXXXE系列仪表使用的是MODBUS-RTU通讯协议,MODBUS协议详细定义了校验码、数据序列等,这些都是特定数据交换的必要内容。
MODBUS协议在一根通讯线上使用主从应答式连接(半双工),这意味着在一根单独的通讯线上信号沿着相反的两个方向传输。
首先,主计算机的信号寻址到一台唯一的终端设备(从机),然后,终端设备发出的应答信号以相反的方向传输给主机。
MODBUS协议只允许在主机(PC,PLC等)和终端设备之间通讯,而不允许独立的终端设备之间的数据交换,这样各终端设备不会在它们初始化时占据通讯线路,而仅限于响应到达本机的查询信号。
1.2 查询—回应周期1.2.1 查询查询消息中的功能代码告之被选中的从设备要执行何种功能。
数据段包含了从设备要执行功能的任何附加信息。
例如功能代码03是要求从设备读保持寄存器并返回它们的内容。
数据段必须包含要告之从设备的信息:从何寄存器开始读及要读的寄存器数量。
错误检测域为从设备提供了一种验证消息内容是否正确的方法。
1.2.2 回应如果从设备产生一正常的回应,在回应消息中的功能代码是在查询消息中的功能代码的回应。
数据段包括了从设备收集的数据:如寄存器值或状态。
如果有错误发生,功能代码将被修改以用于指出回应消息是错误的,同时数据段包含了描述此错误信息的代码。
错误检测域允许主设备确认消息内容是否可用。
1.3 传输方式传输方式是指一个数据帧内一系列独立的数据结构以及用于传输数据的有限规则,下面定义了与MODBUS 协议–RTU方式相兼容的传输方式。
每个字节的位:·1个起始位·8个数据位,最小的有效位先发送·无奇偶校验位·1个停止位错误检测(Error checking):CRC(循环冗余校验)1.4 协议当数据帧到达终端设备时,它通过一个简单的―端口‖进入被寻址到的设备,该设备去掉数据帧的―信封‖(数据头),读取数据,如果没有错误,就执行数据所请求的任务,然后,它将自己生成的数据加入到取得的―信封‖中,把数据帧返回给发送者。
Modbus通讯报文说明
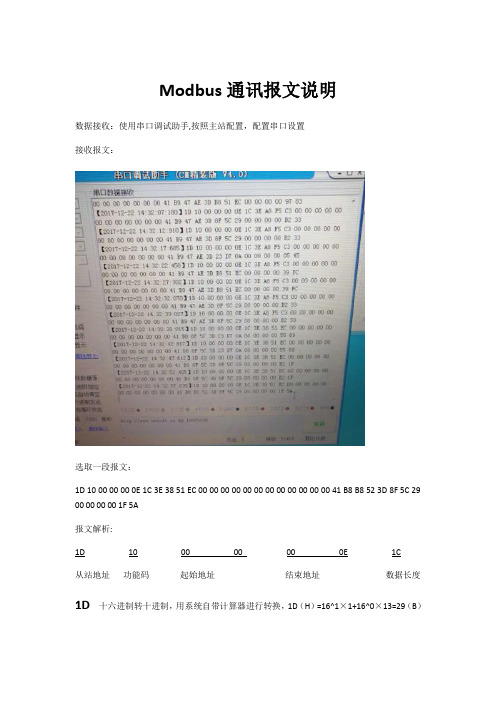
Modbus通讯报文说明数据接收:使用串口调试助手,按照主站配置,配置串口设置接收报文:选取一段报文:1D 10 00 00 00 0E 1C 3E 38 51 EC 00 00 00 00 00 00 00 00 00 00 00 00 41 B8 B8 52 3D 8F 5C 29 00 00 00 00 1F 5A报文解析:1D 10 00 00 00 0E 1C从站地址功能码起始地址结束地址数据长度1D十六进制转十进制,用系统自带计算器进行转换,1D(H)=16^1×1+16^0×13=29(B)0000 十六进制转十进制,用系统自带计算器进行转换,转换结果0 000E 十六进制转十进制,用系统自带计算器进行转换,转换结果14接下来都是数据内容:3E3851EC 00000000 00000000 00000000 41B8B852 3D8F5C29 000000003E3851EC使用浮点数转十六进制转换器转换在float输入值,转换结果是0.1800000000 使用浮点数转十六进制转换器转换在float输入值,转换结果是0 00000000 使用浮点数转十六进制转换器转换在float输入值,转换结果是0 00000000 使用浮点数转十六进制转换器转换在float输入值,转换结果是0 41B8B852 使用浮点数转十六进制转换器转换在float输入值,转换结果是23.09 3D8F5C29 使用浮点数转十六进制转换器转换在float输入值,转换结果是0。
07 00000000 使用浮点数转十六进制转换器转换在float输入值,转换结果是0接下来是CRC:1F 5A校验码1F 5A 使用CRC_Calc+v0。
1进行CRC计算得出CRC为5A1F。
Modbus功能码表
Modbus功能码一览________________________________________ Modbus网络是一个工业通信系统,由带智能终端的可编程序控制器和计算机通过公用线路或局部专用线路连接而成。
其系统结构既包括硬件、亦包括软件。
它可应用于各种数据采集和过程监控。
下表1是ModBus 的功能码定义。
表1 ModBus功能码功能码名称作用01 读取线圈状态取得一组逻辑线圈的当前状态(ON/OFF)02 读取输入状态取得一组开关输入的当前状态(ON/OFF)03 读取保持寄存器在一个或多个保持寄存器中取得当前的二进制值04 读取输入寄存器在一个或多个输入寄存器中取得当前的二进制值05 强置单线圈强置一个逻辑线圈的通断状态06 预置单寄存器把具体二进值装入一个保持寄存器07 读取异常状态取得8个内部线圈的通断状态,这8个线圈的地址由控制器决定,用户逻辑可以将这些线圈定义,以说明从机状态,短报文适宜于迅速读取状态08 回送诊断校验把诊断校验报文送从机,以对通信处理进行评鉴09 编程(只用于484)使主机模拟编程器作用,修改PC从机逻辑10 控询(只用于484)可使主机与一台正在执行长程序任务从机通信,探询该从机是否已完成其操作任务,仅在含有功能码9的报文发送后,本功能码才发送11 读取事件计数可使主机发出单询问,并随即判定操作是否成功,尤其是该命令或其他应答产生通信错误时12 读取通信事件记录可是主机检索每台从机的ModBus事务处理通信事件记录。
如果某项事务处理完成,记录会给出有关错误13 编程(184/384 484 584)可使主机模拟编程器功能修改PC从机逻辑14 探询(184/384 484 584)可使主机与正在执行任务的从机通信,定期控询该从机是否已完成其程序操作,仅在含有功能13的报文发送后,本功能码才得发送15 强置多线圈强置一串连续逻辑线圈的通断16 预置多寄存器把具体的二进制值装入一串连续的保持寄存器17 报告从机标识可使主机判断编址从机的类型及该从机运行指示灯的状态18 (884和MICRO 84)可使主机模拟编程功能,修改PC状态逻辑19 重置通信链路发生非可修改错误后,是从机复位于已知状态,可重置顺序字节20 读取通用参数(584L)显示扩展存储器文件中的数据信息21 写入通用参数(584L)把通用参数写入扩展存储文件,或修改之22~64 保留作扩展功能备用65~72 保留以备用户功能所用留作用户功能的扩展编码73~119 非法功能120~127 保留留作内部作用128~255 保留用于异常应答Modbus网络只是一个主机,所有通信都由他发出。
汇川PLC通信手册(H2u系列)
COM0 与计算机的连接有三种方式,可通过三种选配电缆实现。 方式 1(JP0 需要接通):PLC 侧为 RS422,计算机侧为 USB,提供选配电缆,型号: 方式 2(JP0 需要接通):PLC 侧为 RS422,计算机侧为 RS232,SL 下载电缆
COM0 与其它设备通信连接。 方式 1(JP0 需要接通):用户自制 RS422 电缆,需要用到 TXD+,TXD-和 RXD+,RXD-。
概述
H1u/H2u 系列 PLC 包含两独立物理串行通信口,分别命名为 COM0 和 COM1。COM0 具有编程、监控功能,若需要也可由用户定义为其他功能。COM1 功能即完全由用户自由定 义。
整机硬件标准配置,COM0 硬件为标准 RS485 和 RS422,两者兼容,接口端子为 8 孔 鼠标头母座。COM1 硬件为 RS485,接口为接线端子。
2.1 COM0 协议切换逻辑...................................................................................................4 2.2 COM1 协议切换逻辑...................................................................................................4 2.3 串口通信格式设置.......................................................................................................5 2.4 串口通信格式设置软元件一览表...............................................................................6 3. 通信协议说明...........................................................................................................................7 3.1 监控协议.......................................................................................................................7 3.2 并联协议.......................................................................................................................7 3.3 N:N 协议.......................................................................................................................9 3.4 计算机链接协议.........................................................................................................10 3.5 RS 指令.......................................................................................................................10 3.6 MODBUS 从站协议...................................................................................................10 3.7 MODBUS 指令...........................................................................................................11 附件 1:..........................................................................................................................................15 H1u/H2u 系列 PLC MODBUS 从站协议 .....................................................................................15 概述:.....................................................................................................................................15 1 MODBUS 帧格式................................................................................................................15
汇川—H2U系列XP型控制器补充说明书
D n 例如接收的数据为 : 11、12、13、14
D500 D501
差异描述
原来H2U与升级版H2U的区别如下表:
原来H2U系列 用户软元件 M8000~M8255 特殊变量 D8000~D8255 独立串口 两个独立串口 (COM0和COM1) COM0串口支持程序下载和HMI 监控协议;COM1串口支持HMI 监控协议、并联协议、N:N协议、 MODBUS从站协议、计算机链接协 议、以及MODBUS/RS功能 升级版H2U-XP系列 M8000~M8511 D8000~D8511 四个独立串口 COM0、COM1、COM2、COM3(COM3需要 通过扩展板卡扩展第四个独立串口COM3) COM0串口支持程序下载和HMI监控协议; COM1、COM2和COM3串口支持HMI监控协 议、并联协议、N:N协议、MODBUS从站协议、 计算机链接协议、以及MODBUS/RS功能 仅支持RS422通信。软件仅支持编程协议,触 摸屏监控协议; 16bit 32bit √
n1 设 置 为K 2 , R S 2 指 令 用 于C O M 2 通 讯 口 当 X 1 为O N 时 , 指 令 执 行 后 通 讯 的 收 发 数 据 存 放 如 右 图。
02 04 00
高字节
01 03 05
低字节
CAN-LINK 2.0系统特殊软元件 协议标志 M8280 0:CAN-LING VER2.00协议 1:CAN-LING VER1.00协议
MODBUS通讯步骤
一、协议概述本驱动支持标准Modbus串行口RTU,ASCII和TCP协议。
协议:B/T 19582—2008 基于Modbus协议的工业自动化网络规范协议第1部分:Mdobus应用协议 2008-02-27发布参考资料:基于Modbus协议的工业自动化网络规范第2部分:Modbus协议在串行链路上的实现指南第3部分:Modbus协议在TCP/IP上的实现指南2008-09-27发布二、硬件配置与连接参见设备说明书。
三、力控配置1、在MODBUS中选择标准MODBUS组建设备以RTU为例以上参数请结合现场实际情况填写,设备地址要和连接设备的地址一致。
2、通讯端口配置1)串口配置请根据连接设备的串参数保持一致。
2)以太网配置IP和端口要与连接设备配置一致3)采集配置(1)写单个寄存器:HR保持寄存器单寄存的写入操作,一般设备支持这个命令。
一条命令只能写一个寄存器。
简单的数据类型可以用这条命令支持,如8位、16位的数据类型可以用此命令写入。
(2)写多个寄存器:HR保持寄存器多寄存器的写入操作,一条命令可以写多个寄存的值。
复杂的数据类型用这条命令支持,如32位,64位的数据类型。
(3)屏蔽写寄存器:HR保持寄存器的模拟量按位操作命令(设备要支持屏蔽写命令22功能码)。
(4)最大长度:是指MODBUS中一条数据所读取的字(两个字节)数,包的长度越长,一次读取的数据就越多,通讯效率就越快。
MODBUS协议中规定数据包最大长度不能超过255个字节。
另外有些PLC对包长还有限制,请根据具体设备进行填写。
(5)组包间隔:两个相邻采集点的字偏移地址如果大于等于“组包间隔”就重新打一个包。
他可以控制包中数据点的密度,如上图配置包中相邻数据的地址间距不会大于10。
(6)05功能码:选中后线圈下置命令用05功能码执行。
(7)15功能码:选中后线圈下置命令用15功能码执行。
(8)高级:见注意事项四、数据连接1.手动建点打开组态软件,选择“数据库组态”->“数据库”新建点如下图:选择相应的点类型,点击继续填写点名,其他可以默认(详细信息可参见“力控联机帮助”->“数据库与网络开发”->“实时数据库系统”->“点组态”),点击数据连接点参数:常用的是PV(现场实时值)和DESC,当要读取字符串时要用DESC连接IO设备:选择要连接的的设备名称连接项:点击“增加”增加链接项如下图1)内存区:命令类型(寄存器类型)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地址地址主站通讯属性变量名称数据类型(10进制)(16进制)00x0000QW65024,bit0位10x0001QW65024,bit1位20x0002QW65024,bit2位30x0003QW65024,bit3位40x0004QW65024,bit4位50x0005QW65024,bit5位60x0006QW65024,bit6位………..位160x0010QW65025,bit0位170x0011QW65025,bit1位180x0012QW65025,bit2位………..位640x0040QW65028,bit0位650x0041QW65028,bit1位660x0042QW65028,bit2位670x0043QW65028,bit3位680x0044QW65028,bit4位690x0045QW65028,bit5位700x0046QW65028,bit6位710x0047QW65028,bit7位720x0048QW65028,bit8位730x0049QW65028,bit9位740x004A QW65028,bit10位750x004B QW65028,bit11位760x004C QW65028,bit12位770x004D QW65028,bit13位780x004E QW65028,bit14位790x004F QW65028,bit15位800x0050QW65029,bit0位810x0051QW65029,bit1位820x0052QW65029,bit2位830x0053QW65029,bit3位840x0054QW65029,bit4位850x0055QW65029,bit5位860x0056QW65029,bit6位870x0057QW65029,bit7位880x0058QW65029,bit8位890x0059QW65029,bit9位900x005A QW65029,bit10位910x005B QW65029,bit11位920x005C QW65029,bit12位930x005D QW65029,bit13位940x005E QW65029,bit14位950x005F QW65029,bit15位960x0060QW65030,bit0位1000x0064QW65030,bit4位1010x0065QW65030,bit5位1020x0066QW65030,bit6位1030x0067QW65030,bit7位1040x0068QW65030,bit8位1050x0069QW65030,bit9位1060x006A QW65030,bit10位1070x006B QW65030,bit11位1080x006C QW65030,bit12位1090x006D QW65030,bit13位1100x006E QW65030,bit14位1110x006F QW65030,bit15位1120x0070QW65031,bit0位1130x0071QW65031,bit1位1140x0072QW65031,bit2位1150x0073QW65031,bit3位1160x0074QW65031,bit4位1170x0075QW65031,bit5位1180x0076QW65031,bit6位1190x0077QW65031,bit7位1200x0078QW65031,bit8位1210x0079QW65031,bit9位1220x007A QW65031,bit10位1230x007B QW65031,bit11位1240x007C QW65031,bit12位1250x007D QW65031,bit13位1260x007E QW65031,bit14位1270x007F QW65031,bit15位1280x0080QW65032,bit0位1290x0081QW65032,bit1位1300x0082QW65032,bit2位1310x0083QW65032,bit3位1320x0084QW65032,bit4位1330x0085QW65032,bit5位1340x0086QW65032,bit6位1350x0087QW65032,bit7位1360x0088QW65032,bit8位1370x0089QW65032,bit9位1380x008A QW65032,bit10位1390x008B QW65032,bit11位1400x008C QW65032,bit12位1410x008D QW65032,bit13位1420x008E QW65032,bit14位1430x008F QW65032,bit15位1440x0090QW65033,bit0位只读(4096个)物理离散量输入,功能码:0x021480x0094QW65033,bit4位1490x0095QW65033,bit5位1500x0096QW65033,bit6位1510x0097QW65033,bit7位1520x0098QW65033,bit8位1530x0099QW65033,bit9位1540x009A QW65033,bit10位1550x009B QW65033,bit11位1560x009C QW65033,bit12位1570x009D QW65033,bit13位1580x009E QW65033,bit14位1590x009F QW65033,bit15位1600x00A0QW65034,bit0位1610x00A1QW65034,bit1位1620x00A2QW65034,bit2位1630x00A3QW65034,bit3位1640x00A4QW65034,bit4位1650x00A5QW65034,bit5位1660x00A6QW65034,bit6位1670x00A7QW65034,bit7位1680x00A8QW65034,bit8位1690x00A9QW65034,bit9位1700x00AA QW65034,bit10位1710x00AB QW65034,bit11位1720x00AC QW65034,bit12位1730x00AD QW65034,bit13位1740x00AE QW65034,bit14位1750x00AF QW65034,bit15位1760x00B0QW65035,bit0位1770x00B1QW65035,bit1位1780x00B2QW65035,bit2位1790x00B3QW65035,bit3位1800x00B4QW65035,bit4位1810x00B5QW65035,bit5位1820x00B6QW65035,bit6位1830x00B7QW65035,bit7位1840x00B8QW65035,bit8位1850x00B9QW65035,bit9位1860x00BA QW65035,bit10位1870x00BB QW65035,bit11位1880x00BC QW65035,bit12位1890x00BD QW65035,bit13位1900x00BE QW65035,bit14位1910x00BF QW65035,bit15位1920x00C0QW65036,bit0位1960x00C4QW65036,bit4位1970x00C5QW65036,bit5位1980x00C6QW65036,bit6位1990x00C7QW65036,bit7位………..位20480x0800QW65152,bit0位………..位40950x0fff QW65279,bit15位40960x1000QW65280,bit0位40970x1001QW65280,bit1位40980x1002QW65280,bit2位40990x1003QW65280,bit3位41000x1004QW65280,bit4位41010x1005QW65280,bit5位…………位41120x1010QW65281,bit0位41130x1011QW65281,bit1位41140x1012QW65281,bit2位41150x1013QW65281,bit3位41160x1014QW65281,bit4位41170x1015QW65281,bit5位41180x1016QW65281,bit6位41190x1017QW65281,bit7位41200x1018QW65281,bit8位41210x1019QW65281,bit9位41220x101a QW65281,bit10位41230x101b QW65281,bit11位41240x101c QW65281,bit12位41250x101d QW65281,bit13位41260x101e QW65281,bit14位41270x101f QW65281,bit15位…………位41340x1026QW65282,bit6位41350x1027QW65282,bit7位41360x1028QW65282,bit8位41370x1029QW65282,bit9位41380x102a QW65282,bit10位41390x102b QW65282,bit11位41400x102c QW65282,bit12位41410x102d QW65282,bit13位41420x102e ……位41430x102f ……位41440x1030QW65283,bit0位41450x1031QW65283,bit1位41460x1032QW65283,bit2位比特访问41500x1036QW65283,bit6位41510x1037QW65283,bit7位41520x1038QW65283,bit8位41530x1039QW65283,bit9位41540x103a QW65283,bit10位41550x103b QW65283,bit11位41560x103c QW65283,bit12位41570x103d QW65283,bit13位41580x103e QW65283,bit14位41590x103f QW65283,bit15位41600x1040QW65284,bit0位41610x1041QW65284,bit1位41620x1042QW65284,bit2位41630x1043QW65284,bit3位41640x1044QW65284,bit4位41650x1045QW65284,bit5位41660x1046QW65284,bit6位41670x1047QW65284,bit7位41680x1048QW65284,bit8位41690x1049QW65284,bit9位41700x104a QW65284,bit10位41710x104b QW65284,bit11位41720x104c QW65284,bit12位41730x104d QW65284,bit13位41740x104e QW65284,bit14位41750x104f QW65284,bit15位41760x1050QW65285,bit0位41770x1051QW65285,bit1位41780x1052QW65285,bit2位41790x1053QW65285,bit3位41800x1054QW65285,bit4位41810x1055QW65285,bit5位41820x1056QW65285,bit6位41830x1057QW65285,bit7位41840x1058QW65285,bit8位41850x1059QW65285,bit9位41860x105a QW65285,bit10位41870x105b QW65285,bit11位41880x105c QW65285,bit12位41890x105d QW65285,bit13位41900x105e QW65285,bit14位41910x105f QW65285,bit15位41920x1060QW65286,bit0位41930x1061QW65286,bit1位41940x1062QW65286,bit2位读写(4096个)线圈功能码:0x01,0x05,0x0f41980x1066QW65286,bit6位41990x1067QW65286,bit7位42000x1068QW65286,bit8位42010x1069QW65286,bit9位42020x106a QW65286,bit10位42030x106b QW65286,bit11位42040x106c QW65286,bit12位42050x106d QW65286,bit13位42060x106e QW65286,bit14位42070x106f QW65286,bit15位…………位46080x1200QW65312,bit0位46090x1201QW65312,bit1位46100x1202QW65312,bit2位46110x1203QW65312,bit3位46120x1204QW65312,bit4位………….位[m]…QW[x],bit[y]位………….位48580x12FA QW65327,bit10位48590x12FB QW65327,bit11位48600x12FC QW65327,bit12位48610x12FD QW65327,bit13位48620x12FE QW65327,bit14位48630x12FF QW65327,bit15位48640x1300QW65328,bit0位48650x1301QW65328,bit1位48660x1302QW65328,bit2位48670x1303QW65328,bit3位48680x1304QW65328,bit4位………….位[m]…QW[x],bit[y]位………….位51140x13FA QW65343,bit10位51150x13FB QW65343,bit11位51160x13FC QW65343,bit12位51170x13FD QW65343,bit13位51180x13FE QW65343,bit14位51190x13FF QW65343,bit15位51200x1400QW65344,bit0位51210x1401QW65344,bit1位51220x1402QW65344,bit2位51230x1403QW65344,bit3位51240x1404QW65344,bit4位………….位………….位53700x14FA QW65359,bit10位53710x14FB QW65359,bit11位53720x14FC QW65359,bit12位53730x14FD QW65359,bit13位53740x14FE QW65359,bit14位53750x14FF QW65359,bit15位………….位61440x1800QW65408,bit0位…………位81910x1fff QW65535,bit15位00x0MW0字………字20470x07ff MW2047字20480x0800MW2048字20490x0801MW2049字20500x0802MW2050字20510x0803MW2051字20520x0804MW205220530x0805MW205320540x0806MW205420550x0807MW205520560x0808MW205620570x0809MW205720580x080a MW205820590x080b MW205920600x080c MW206020610x080d MW206120620x080e MW206220630x080f MW2063…………字21160x0844MW2116字(无符号)21170x0845MW2117字(无符号)21180x0846MW2118字(无符号)21190x0847MW2119字(无符号)21200x0848MW2120字(无符号)21210x0849MW2121字(无符号)21220x084A MW2122字(无符号)21230x084B MW2123字(无符号)…………字21450x0861MW2145字(无符号)21460x0862MW2146字(无符号)21470x0863MW2147字(无符号)21480x0864MW214821490x0865MW214921500x0866MW215021510x0867MW2151单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点21550x086B MW215521560x086C MW215621570x086D MW215721580x086E MW215821590x086F MW215921600x0870MW2160字(有符号) 21610x0871MW2161字(有符号) 21620x0872MW2162字(有符号) 21630x0873MW2163字(有符号) 21640x0874MW2164字(无符号) 21650x0875MW2165字(无符号) 21660x0876MW2166字(无符号)…………字81920x2000MW8192字81930x2001MW8193字81940x2002MW8194字81950x2003MW8195字81960x2004MW8196字………….字[m]……….字………….字84420x20FA MW8442字84430x20FB MW8443字84440x20FC MW8444字84450x20FD MW8445字84460x20FE MW8446字84470x20FF MW8447字84480x2100MW8448字(有符号) 84490x2101MW8449字(有符号) 84500x2102MW8450字(有符号) 84510x2103MW8451字(有符号) 84520x2104MW8452字(有符号)………….字(有符号) [m]……….字(有符号)………….字(有符号) 86980x21FA MW8698字(有符号) 86990x21FB MW8699字(有符号) 87000x21FC MW8700字(有符号) 87010x21FD MW8701字(有符号) 87020x21FE MW8702字(有符号) 87030x21FF MW8703字(有符号)87040x2200MW8704 87050x2201MW8705 87060x2202MW8706 87070x2203MW8707单精度浮点单精度浮点单精度浮点单精度浮点16比特访问只读(32768)输入寄存器功能码:0x0487110x2207MW871187120x2208MW871287130x2209MW8713………….……. [m]……….[m+1]……….………….……. 92040x23F4MW920492050x23F5MW920592060x23F6MW920692070x23F7MW920792080x23F8MW920892090x23F9MW920992100x23FA MW921092110x23FB MW921192120x23FC MW921292130x23FD MW921392140x23FE MW921492150x23FF MW9215………….……. 163840x4000……字………字327670x7fff MW32767字327680x8000MW32768字327690x8001MW32769字…………字348000x87F0MW34800字348010x87F1MW34801348020x87F2MW34802348030x87F3MW34803348040x87F4MW34804348050x87F5MW34805字(无符号)………….字348160x8800MW34816字348170x8801MW34817字………….字348290x880D MW34829字(无符号) 348300x880E MW34830字(无符号) 348310x880F MW34831字(无符号) 348320x8810MW34832348330x8811MW34833348340x8812MW34834348350x8813MW34835348360x8814MW34836348370x8815MW34837348380x8816MW34838 348390x8817MW34839单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点348420x881A MW34842348430x881B MW34843348440x881C MW34844字(有符号)348450x881D MW34845字(有符号)348460x881E MW34846字(有符号)348470x881F MW34847字(有符号)348480x8820MW34848字(无符号)348490x8821MW34849字(无符号)348500x8822MW34850字(无符号)………….字368640x9000MW36864字368650x9001MW36865字368660x9002MW36866字368670x9003MW36867字368680x9004MW36868字………….字[m]……….字………….字371140x90FA MW37114字371150x90FB MW37115字371160x90FC MW37116字371170x90FD MW37117字371180x90FE MW37118字371190x90FF MW37119字371200x9100MW37120字(有符号)371210x9101MW37121字(有符号)371220x9102MW37122字(有符号)371230x9103MW37123字(有符号)371240x9104MW37124字(有符号)………….字(有符号)[m]……….字(有符号)………….字(有符号)373700x91FA MW37370字(有符号)373710x91FB MW37371字(有符号)373720x91FC MW37372字(有符号)373730x91FD MW37373字(有符号)373740x91FE MW37374字(有符号)373750x91FF MW37375字(有符号)373760x9200MW37376373770x9201MW37377373780x9202MW37378373790x9203MW37379373800x9204MW37380373810x9205MW37381373820x9206MW37382373830x9207MW37383373840x9208MW37384373850x9209MW37385………….…….[m]……….[m+1]……….………….…….单精度浮点单精度浮点单精度浮点单精度浮点读写(32768)保存寄存器,功能码:0x03,0x10单精度浮点单精度浮点单精度浮点378780x93F6MW37878378790x93F7MW37879378800x93F8MW37880378810x93F9MW37881378820x93FA MW37882378830x93FB MW37883378840x93FC MW37884378850x93FD MW37885378860x93FE MW37886378870x93FF MW37887……….字49152MW49152字……….字655350xffff MW65535字单精度浮点单精度浮点单精度浮点单精度浮点单精度浮点使能状态(0-OFF,1-ON)程序运行状态(0-停止,1-运行)急停状态(0-OFF,1-ON)系统故障状态(0-无故障,1-有故障)伺服故障0-无故障,1-有故障)系统启动完成状态(0-未完成,1-完成)保留保留P变量读取是否成功(0-失败,1-成功)P变量写入是否成功(0-失败,1-成功)直接运动到位状态(0-无效或未到位,1-到位)保留IN[000]状态(0-OFF,1-ON,下同)IN[001]IN[002]IN[003]IN[004]IN[005]IN[006]IN[007]IN[008]IN[009]IN[010]IN[011]IN[012]IN[013]IN[014]IN[015]IN[016]IN[017]IN[018]IN[019]IN[020]IN[021]IN[022]IN[023]IN[024]IN[025]IN[026]IN[027]IN[028]IN[029]IN[030]IN[031]IN[032]备注内容IN[036]IN[037]IN[038]IN[039]IN[040]IN[041]IN[042]IN[043]IN[044]IN[045]IN[046]IN[047]IN[048]IN[049]IN[050]IN[051]IN[052]IN[053]IN[054]IN[055]IN[056]IN[057]IN[058]IN[059]IN[060]IN[061]IN[062]IN[063]OUT[000]状态(0-OFF,1-ON,下同) OUT[001]OUT[002]OUT[003]OUT[004]OUT[005]OUT[006]OUT[007]OUT[008]OUT[009]OUT[010]OUT[011]OUT[012]OUT[013]OUT[014]OUT[015]OUT[016]OUT[020]OUT[021]OUT[022]OUT[023]OUT[024]OUT[025]OUT[026]OUT[027]OUT[028]OUT[029]OUT[030]OUT[031]OUT[032]OUT[033]OUT[034]OUT[035]OUT[036]OUT[037]OUT[038]OUT[039]OUT[040]OUT[041]OUT[042]OUT[043]OUT[044]OUT[045]OUT[046]OUT[047]OUT[048]OUT[049]OUT[050]OUT[051]OUT[052]OUT[053]OUT[054]OUT[055]OUT[056]OUT[057]OUT[058]OUT[059]OUT[060]OUT[061]OUT[062]OUT[063]J1伺服告警(0-无告警,1-有告警,下同)J5伺服告警J6伺服告警J7伺服告警J8伺服告警保留用户自定义区程序启动运行(复归型)程序暂停(复归型)程序停止(复归型)使能开关(0-OFF,1-ON)急停开关(0-OFF,1-ON)故障复位(复归型)保留示教J1/X +(复归型)示教J1/Y +(复归型)示教J3/Z +(复归型)示教J4/A +(复归型)示教J5 +(复归型)示教J6 +(复归型)保留保留示教J1/X -(复归型)示教J2/Y -(复归型)示教J3/Z -(复归型)示教J4/A -(复归型)示教J5 -(复归型)示教J6 -(复归型)保留保留保留工位程序1工位程序2工位程序3保留保留把机器人当前位置写入当前P变量(复归型)把修改位置(MW34832等)写入当前P变量(复归型)直接运动到当前P变量位置(复归型)保留保留OUT[000]控制命令(0-OFF,1-ON,下同)OUT[001]OUT[002]OUT[006] OUT[007] OUT[008] OUT[009] OUT[010] OUT[011] OUT[012] OUT[013] OUT[014] OUT[015] OUT[016] OUT[017] OUT[018] OUT[019] OUT[020] OUT[021] OUT[022] OUT[023] OUT[024] OUT[025] OUT[026] OUT[027] OUT[028] OUT[029] OUT[030] OUT[031] OUT[032] OUT[033] OUT[034] OUT[035] OUT[036] OUT[037] OUT[038] OUT[039] OUT[040] OUT[041] OUT[042] OUT[043] OUT[044] OUT[045] OUT[046] OUT[047] OUT[048] OUT[049] OUT[050]OUT[054]OUT[055]OUT[056]OUT[057]OUT[058]OUT[059]OUT[060]OUT[061]OUT[062]OUT[063]保留写入B0变量(复归型)写入B1变量(复归型)写入B2变量(复归型)写入B3变量(复归型)写入B4变量(复归型)…….写入B[n]变量(m=4608+n,x=65312+n/16, y=n%16)(复归型)…….写入B250变量(复归型)写入B251变量(复归型)写入B252变量(复归型)写入B253变量(复归型)写入B254变量(复归型)写入B255变量(复归型)写入R0变量(复归型)写入R1变量(复归型)写入R2变量(复归型)写入R3变量(复归型)写入R4变量(复归型)…….写入R[n]变量(m=4864+n,x=65328+n/16, y=n%16)(复归型)…….写入R250变量(复归型)写入R251变量(复归型)写入R252变量(复归型)写入R253变量(复归型)写入R254变量(复归型)写入R255变量(复归型)写入D0变量(复归型)写入D1变量(复归型)写入D2变量(复归型)写入D3变量(复归型)写入D4变量(复归型)…….…….写入D250变量(复归型)写入D251变量(复归型)写入D252变量(复归型)写入D253变量(复归型)写入D254变量(复归型)写入D255变量(复归型)保留用户自定义区预留系统其他用途使用(2048 字)当前坐标系当前速度故障记录当前模式(1-示教,2-再现)J1/X 坐标低位J2/X 坐标高位J2/Y 坐标低位J2/Y 坐标高位J3/Z 坐标低位J3/Z 坐标高位J4/A 坐标低位J4/A 坐标高位J5/B 坐标低位J5/B 坐标高位J6/C 坐标低位J6/C 坐标高位保留J1伺服告警码J2伺服告警码J3伺服告警码J4伺服告警码J5伺服告警码J6伺服告警码J7伺服告警码J8伺服告警码保留当前工位程序保留保留P变量读取的J1/X 坐标低位P变量读取的J1/X 坐标高位P变量读取的J2/Y 坐标低位P变量读取的J2/Y 坐标高位P变量读取的J3/Z 坐标高位P变量读取的J4/A 坐标低位P变量读取的J4/A 坐标高位P变量读取的J5/B 坐标低位P变量读取的J5/B 坐标高位P变量读取的J6/C 坐标低位P变量读取的J6/C 坐标高位P变量读取的臂参数1P变量读取的臂参数2P变量读取的臂参数3P变量读取的臂参数4P变量读取的坐标系P变量读取的工具坐标系号P变量读取的用户坐标系号保留B0变量读取值B1变量读取值B2变量读取值B3变量读取值B4变量读取值…….B[n]变量读取值 (m=8192+n)…….B250变量读取值B251变量读取值B252变量读取值B253变量读取值B254变量读取值B255变量读取值R0变量读取值R1变量读取值R2变量读取值R3变量读取值R4变量读取值…….R[n]变量读取值 (m=8448+n)…….R250变量读取值R251变量读取值R252变量读取值R253变量读取值R254变量读取值R255变量读取值D0变量读取值的低位D0变量读取值的高位D1变量读取值的低位D1变量读取值的高位D2变量读取值的高位D3变量读取值的低位D3变量读取值的高位D4变量读取值的低位D4变量读取值的高位…….D[n]变量读取值的低位 (m=8704+n*2)D[n]变量读取值的高位…….D250变量读取值的低位D250变量读取值的高位D251变量读取值的低位D251变量读取值的高位D252变量读取值的低位D252变量读取值的高位D253变量读取值的低位D253变量读取值的高位D254变量读取值的低位D254变量读取值的高位D255变量读取值的低位D255变量读取值的高位保留示教方式选择(0-连续示教,1-寸动示教)直接运动方式设置(0-MovJ,1-MovL)保留坐标系选择(1-关节,2-直角,3-工具,4-用户)速度设置(1-100)保留保留保留当前P 变量的序号(等待读、写、运动操作)P变量写入的J1/X 坐标低位P变量写入的J1/X 坐标高位P变量写入的J2/Y 坐标低位P变量写入的J2/Y 坐标高位P变量写入的J3/Z 坐标低位P变量写入的J3/Z 坐标高位P变量写入的J4/A 坐标低位P变量写入的J4/A 坐标高位寸动线性步长(单位毫米,直角坐标下有效)预留系统其他用途使用寸动关节步长(单位度,关节坐标下有效)用户自定义区P变量写入的臂参数2P变量写入的臂参数3P变量写入的臂参数4P变量写入的坐标系P变量写入的工具坐标系号P变量写入的用户坐标系号-B0变量写入值B1变量写入值B2变量写入值B3变量写入值B4变量写入值…….B[n]变量写入值 (m=36864+n)…….B250变量写入值B251变量写入值B252变量写入值B253变量写入值B254变量写入值B255变量写入值R0变量写入值R1变量写入值R2变量写入值R3变量写入值R4变量写入值…….R[n]变量写入值 (m=37120+n)…….R250变量写入值R251变量写入值R252变量写入值R253变量写入值R254变量写入值R255变量写入值D0变量写入值的低位D0变量写入值的高位D1变量写入值的低位D1变量写入值的高位D2变量写入值的低位D2变量写入值的高位D3变量写入值的低位D3变量写入值的高位D4变量写入值的低位D4变量写入值的高位…….D[n]变量写入值的低位 (m=37376+n*2) D[n]变量写入值的高位…….D250变量写入值的低位D250变量写入值的高位D252变量写入值的高位D253变量写入值的低位D253变量写入值的高位D254变量写入值的低位D254变量写入值的高位D255变量写入值的低位D255变量写入值的高位保留用户自定义区。