轨迹全自动扫描及涂胶技术
自适应脉冲整形轨迹涂胶残余振动抑制研究
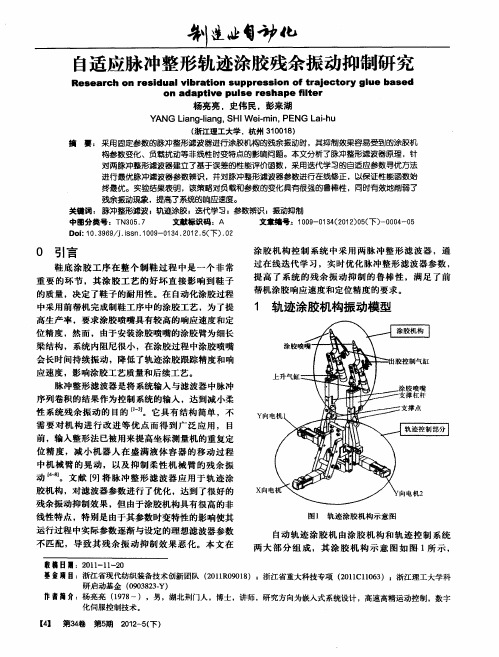
自动 轨 迹 涂胶 机 由涂 胶 机 构 和 轨 迹 控 制 系统 两 大 部 分 组 成 ,其 涂 胶 机 构 示 意 图 如 图、 所 示 , 1
敢稿 日麓:2 1 - 1 2 0 1 1- 0 基 盒项目:浙江省现代纺织装备技术 创新 团队 (0 1 0 0 8 ;浙江省重大科技专项 (0 1 16 );浙江理工大学 科 2 1R 9 1 ) 2 1Cl0 3 研启动基金 (93 2 . 0 0 8 3Y) 作者 简介:杨亮亮 (9 8 17 一),男,湖北荆 门人 ,博士 ,讲 师,研 究方向为嵌 入式系统设计 ,高速 高精 运动控制 ,数 字 化伺服控制技术 。
振 动 特 性 轨 迹 控 制 系统 函数 可 以认 为 是 一 个 刚 体
模 态 和 几 个 振 动 模 态 的叠 加 ,其 传 递 函 数 具 有 如
下结 构 :
1 }
时 间
图2 两 脉 冲 的 整 形 滤 波 器
P ( + 寿
( 1 )
若 柔 性 系统 具 有 一 个 需 要 抑 制 的残 余 振 动 模
因 此 , 当 T = 0时 ,且 柔 性 系 统 的 阻 尼 , 1 无 阻 尼 自由振 荡 频率 ∞ 精 确 已知 时 ,可 以通过 图 3中 的 确 定 理 想 参 数 , ,得 到 理 想 的 脉 冲 整 形 器 传 递 函数 ,具 有理 想 的 振 动 抑 制 效 果 ,但 是 ,由于柔 性 系统 的 非线性 特 点 ,其 阻尼 ,无 阻
以看 出 由于 喷 胶 嘴支 撑 杠 杆为 细 长梁 结构 ,因此 , 系统 具 有 典 型 的残 余振 动 特性 。一 个 典 型 的残 余
I 化 I I
工业机器人常见五大应用领域及关键技术【最新整理】
工业机器人常见五大应用领域及关键技术去年全球工业机器人销量达到24万台,同比增长8%。
其中,我国工业机器人市场销量超过6.6万台,继续保持全球第一大工业机器人市场的地位。
但是,按机器人密度来看,即每万名员工对应的机器人保有量,我国不足30台,远低于全球约为50多台的平均水平。
前瞻产业研究院《2016-2021年中国工业机器人行业产销需求预测与转型升级分析报告》数据显示:2015年我国工业机器人产量为32996台,同比增长21.7%。
2016年机器人产业将继续保持快速增长,今年一季度我国工业机器人产量为11497台,同比增长19.9%。
此外,数据显示,2015年我国自主品牌工业机器人生产销售达22257台,同比增长31.3%。
国产自主品牌得到了一定程度的发展,但与发达国家相比,仍有一定差距。
2016年未来全球工业机器人市场趋势包括:大国政策主导,促使工业与服务机器人市场增长;汽车工业仍为工业机器人主要用户;双臂协力型机器人为工业机器人市场新亮点。
一、什么是工业机器人工业机器人是一种通过重复编程和自动控制,能够完成制造过程中某些操作任务的多功能、多自由度的机电一体化自动机械装备和系统,它结合制造主机或生产线,可以组成单机或多机自动化系统,在无人参与下,实现搬运、焊接、装配和喷涂等多种生产作业。
当前,工业机器人技术和产业迅速发展,在生产中应用日益广泛,已成为现代制造生产中重要的高度自动化装备。
二、工业机器人的特点自20世纪60年代初第一代机器人在美国问世以来,工业机器人的研制和应用有了飞速的发展,但工业机器人最显著的特点归纳有以下几个。
1.可编程。
生产自动化的进一步发展是柔性自动化。
工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统(FMS)中的一个重要组成部分。
2.拟人化。
工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。
揭秘宁德时代CATL超级工厂!

揭秘宁德时代CATL超级⼯⼚!3年利润翻近80倍,7年估值超千亿,24天过会刷新最快IPO纪录,上市连续8个涨停板,并在2017年动⼒电池销量⼀举超越松下和⽐亚迪成为全球top1,2018年国内动⼒电池装机量以41.2%占⽐遥遥领先……宁德时代的崛起是现象级的,这其中当然离不开其⼀整套精细的锂电池⽣产流程,本期我们带你揭秘宁德时代的超级⼯⼚。
⼀、电芯诞⽣记⾸先,让我们看⼀下电芯的⽣产产线。
这是国内⾸条、国际⼀流的⾃动化产线,宝马X1和新5系的电芯就是在这⾥诞⽣的哦。
所有进⼊车间的⼈员都必须穿洁净服,戴帽⼦、⼝罩,完毕后,需要经过喷淋间360度⽆死⾓除尘控温、控湿、⽆尘的⼯⼚,可媲美半导体微电⼦的制造环境忙碌的RGV,按照设定的轨道,⾃动搬运材料和为设备上下物料孤独的机械⼿⾃动拆盘码盘有了⾼科技机器⼈、中控系统、在线检测设备和信息追溯系统的助攻,catl的产线可实现“⽣产数据可视化”、“⽣产过程透明化”、“⽣产现场⽆⼈化”。
电芯是⼀个电池系统的最⼩单元。
M个电芯组成⼀个模组,N个模组组成⼀个电池包,这是车⽤动⼒电池的基本结构。
电池就像⼀个储存电能的容器,能储存多少的容量,是靠正极⽚和负极⽚的所负载活性物质多少来决定的。
1 搅拌搅拌就是将正、负极固态电池材料混合均匀后加⼊溶剂,通过真空搅拌机搅拌形成均匀浆状。
2 涂布拌好的活性材料以每分钟80⽶的速度被均匀涂覆到4000⽶长的铜箔上下⾯。
涂布前的铜箔薄如蝉翼,只有6微⽶厚。
涂布⾄关重要,需要保证极⽚厚度和重量⼀致,否则会影响电池的⼀致性。
涂布还必须确保没有颗粒、杂物、粉尘等混⼊极⽚。
否则,导致电池⾃放电过快甚⾄安全隐患。
3 冷压和预分切辊压装置将涂布后的极⽚压实到预定的厚度和密度。
4 极⽿模切和分条在这⾥,⽤模切机模切形成电芯的导电极⽿。
极⽿是电池头上⽿朵,通俗地说就是电池正负极的⽿朵在进⾏充放电时的连接点。
然后,通过切⼑对极⽚进⾏分切。
5 卷绕电芯的正极⽚、负极⽚、隔离膜以卷绕的⽅式组合形成裸电芯。
点胶机的设计步骤

┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ 装 ┊ ┊ ┊ ┊ ┊ 订 ┊ ┊ ┊ ┊ ┊ 线 ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊点胶机的设计步骤南京工业职业技术学院 机械工程系 机电0613 刘苏摘要点胶机器人是机器人系统的一个重要分支, 由于它能进入人类工业生产,并代替了手工业生产,近几十年来受到了广泛的关注。
本文主要介绍了它的概念,设计原理,组成,调试等分析。
全自动点胶机机器人是在多年运动控制技术的基础上研发的高速度,高精度。
适应多种产品点胶,涂胶的自动化设备。
,桌面式点胶机是高机密机械。
自动控制以及精确点胶控制技术于一体的高科技产品,其核心是基于世界上先进的PSP 智能型运动控制系统,本文所介绍的点胶机具有功能强,编程简单,操作方便,价格低等优点,适用于各种点胶产业。
关键词:点胶机,调试,机电一体化,概述,设计,组成。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊Nanjing Institute Of industry TechnologyDepartment of Mechanical EngineeringJidian0613LiuSuAbstractRobot Dispensing Robot is an important branch of the system, because it can enter the human industrial production, and instead of handicraft production, in recent decades by a wide range of concerns. This paper introduces the concept of it, design principles, composition, debugging and other analysis. Automatic dispensing robot motion control in the multi-year technology research and development based on high-speed, high precision. To adapt to a variety of products dispensing, coating of the automation equipment. , Desktop-type machine dispensing a high confidentiality. Automatic control and precise dispensing control technology in one high-tech products, its core is based on the PSP world's advanced intelligent motion control system This article has introduced dispensing functions, and programming is simple, easy to operate, and low price for dispensing a variety of industries.Key words: Dispensing, testing, mechanical and electrical integration, an overview of design, component┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第一章点胶机的概述 (1)1.1点胶机和点胶的定义 (1)1.2点胶机的品牌 (1)1.3点胶机的应用领域 (1)1.4点胶机的发展前景 (2)第二章点胶机的组成及特点 (3)2.1点胶机器人 (3)2.2编程器 (3)2.3点胶控制器 (5)第三章点胶机的选型 (6)3.1点胶机器人 (6)3.2点胶阀 (7)3.3点胶控制器 (7)3.4点胶针头 (8)3.4.1点胶针头的选择方法 (9)3.4.2常用的针头 (11)3.5编程器 (12)3.6胶水 (12)3.7AB胶压力桶 (14)第四章点胶机的调试 (16)4.1点胶机的安装 (16)4.2点胶机的试运行 (17)4.3点胶过程 (18)第五章点胶 (19)5.1点胶工艺分析 (19)5.1.1点胶工艺的优缺点 (19)5.1.2.点胶过程中的工艺 (19)5.2机台存在的不良情况 (20)5.3如何有效而快速的排除胶阀的问题 (21)第六章点胶机的设计理念 (23)┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ 装 ┊ ┊ ┊ ┊ ┊ 订 ┊ ┊ ┊ ┊ ┊ 线 ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊ ┊总结 ..................................................................................................................................... 24 答谢辞 ................................................................................................................................. 25 参考资料 .. (26)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第一章点胶机的概述1.1点胶机和点胶的定义点胶机就是将胶体作相应的控制,并将胶体以其特定的形态分布/涂覆/灌封于特定的产品“之上”或“之内”的专业的自动化控制设备。
自动涂胶机械手工作站

自动涂胶机械手工作站南华大学机械工程学院毕业设计(论文)自动涂胶机械手工作站摘要:本文对机器人在汽车玻璃自动涂胶系统的应用进行了阐述~对机器人工作站中的主要组合部件设计和功能进行了详细的说明。
自动涂胶工作站更加优越于手工涂胶。
手工涂胶难以保证涂胶的一致性~自动涂胶站保证了涂胶的均匀性、一致性、准确的涂敷位置以及优良的生产质量。
本文对工作站中的机械布局和定位夹紧原理进行了分析。
从机器人挡风玻璃涂胶系统的生产实际需要出发~提出了一套玻璃自动对中识别装置~可以对不同规格型号的玻璃进行自动对中识别~提高了生产的柔性。
根据设计经验简单论述了此套系统的工作节拍。
重点论述了装夹定位和六自由度问题。
关键词:汽车, 自动涂胶, 机械手第 1 页共 48 页南华大学机械工程学院毕业设计(论文)Automatic coating robot workstationAbstract: In this paper, the robot automatically in the auto glass adhesive application system, a set of robotic workstations in the main mix design and function of components described in detail. Automatic adhesive coating station is more superior to manual. Manual adhesive is difficult to guarantee the consistency of glue, automatic adhesive coating station ensures the uniformity, consistency, accuracy of the coating location and excellent production quality. In this paper, workstation layout and positioning of mechanical clamping principle isanalyzed. Robot windshield adhesive from the actual needs of production system, a set of automatic glass on the identification device can be of different types of glass specifications automatically identify and improve production flexibility. Discussed according to the design experience, this set of simple systems work the beat. Focuses on the issue of clamping position and six degrees of freedom.Key words:automotive;automatic potting;mechanical hand第 2 页共 48 页南华大学机械工程学院毕业设计(论文)目录1 绪论 (1)1.1 背景 (2)1.2 机器人的定义及分类 (3)1.3 涂胶机器人的发展与应用 (9)1.4 课题的提出、目的及意义 (9)1.5 主要研究内容 (10)2 自动涂胶机械手工作站的总体设计方案 (11)2.1 涂胶机器人整体设计方案解析 (11)2.2 涂胶机器人结构方案设计 (12)2.3本章小结 (20)3 涂胶机械手工作站机械系统的设计 (21)3.1 设计原则 (21)3.2 涂胶机方案的确定 (21)3.3 机器人涂胶工作站的总体布局 (21)3.4 系统的工作节拍 (27)3.5 控制系统 (28)3.6 本章小结 (28)4 涂胶机械手工作站控制系统的设计 (29)4.1控制系统简介 (29)4.2 控制系统方案介绍 (30)参考文献 (31)谢辞 (32)第 3 页共 48 页南华大学机械工程学院毕业设计(论文)附录 (33)第 4 页共 48 页南华大学机械工程学院毕业设计(论文)毕业设计作为大学里的最后一次设计任务,是一次对自己专业知识系统学习的总结与检验,旨在培养自己综合运用所学基础知识、专业知识去分析和解决实际生产中所遇到的问题的能力,树立正确的设计思想,学会运用正确的设计方法进行设计,通过运用设计标准、设计规范、手册、图册以及查阅技术资料来指导自己的设计,锻炼自己的动手能力,绘图能力,通过设计去发现问题,找到问题,解决问题,为今后走向社会打下坚实的基础。
基于机器人的汽车风挡玻璃自动涂胶装配运用

Z方 向为 ±l0mm;X/Y/Z倾 斜 角 度 小 于
± 0.2m m
(4)安 装 精 度 : ±lmm 2.2 涂 胶 设 备 工 艺 流 程 ①通 过 机械手 将风 挡玻 璃上料 到皮 带输 送 线 ②玻 璃输 送列 皮带 线尽 头后 ,翻转 机将 玻璃从输送线翻转到对 小台对中 ③玻璃对 中定位 玻 璃 对 中 定 位 OK一 机 器人 进 行 下一 步骤 玻 璃 对 中 定 位 NG一 机 器 人 将 玻 璃 放 置 NG台 上 并 报 警 声 光 提 醒 ④机器人抓玻璃进行涂胶并检测胶 型 胶 型 检 N OK一 机 器人 进 行 下 一 步骤 胶 型 榆 测 NG一 机 器 人 将 玻 璃 放 置NG台 上并报警声光提醒 ⑤ 机 器 人 进 行 视 觉 定 位 检 测 视 觉 柃 测 OK一机 器 人进 行 下 一 步骤 视觉 检NUNG一机 器人将 玻璃放 置NG台 上 并 报 警 声 光 提 醒 ⑥ 机 器 人 安 装 风 挡 玻 璃 ⑦ 机 器 人 回 到 原 位 等 待
氯 酯粘接 剂 ,涂柿 全长应 确保 如下 图三 角形 的断 面形状 ,左右 对称 ,无偏 倒。 玻璃胶 截 面形状 为等 边 三角形 ,其 中高H=13mm,宽 W=8mm,位置精 度为 ±1mm;
(3) 体定 位要求 :在玻 璃装配 工位 , 车体 是 固定静 止3O秒 ,作为机 器人 装配前 、 后 风 挡 玻 璃 的 作 业时 间 , 车辆 输 送 线 对 车 辆 的综 合定 位精 度 :X/Y方 向为 ±l5mm;
(2) 定 流 鞋 泉 : 使 州 交 流 伺 服 l乜机 , 町 设 定不 同的输 H 3量 , 能 有脉动 。带 加热功 能 ,流 量 可达 80cc/秒。 根据 机 器人的 速 度 变 化等指 示 ,可按 照设定 的输 出量 , 『1动 渊 整 各段轨 迹的 出胶 量。定 量机流 量精 度达到 ±1%;其 输 出 量 应 保 证 涂 胶 枪 涂 胶 直 线Ro CESS I
点胶机应用范围
点胶机可以应用到以下领域:1.电声行业:喇叭、扬声器、蜂鸣器、音响、耳机2.电感行业:小型变压器、贴片变压器、电感、继电器、小型线圈马达。
3.通讯行业:手机按键、手机机壳粘接、对讲机、电话机、传真机4.电脑、数码产品、数码相机、MP3、MP4、电子玩具、机壳粘接5.开关、连接器、线材、插头连接线6.电子:电子元器件、集成电路、线路板点锡膏,电子零件固定及防尘防潮保护,LCD 液晶屏等7.光学:光学镜头、光头、磁头8.机械五金9.电池盒密封10.商标固定粘接11.LED行业在线式继电器点胶机广泛用于LED行业的LED点胶机在工业生产中,很多地方都需要用到点胶,比如集成电路、印刷电路板、彩色液晶屏、电子元器件(如继电器、扬声器)、汽车部件等等。
传统的点胶是靠工人手工操作的。
随着自动化技术的迅猛发展,手工点胶已经远远不能满足工业上的要求。
全自动点胶机是一种专为各种工件涂胶而研制的高品质三自由度涂胶设备以下为点胶机架式机械结构适用于点,直线,圆弧以及任意不规则产品的点胶,涂胶,运动参数下载方便,可直接输入运行轨迹进行编程。
本机器具有很高的定位精度,并有着优良的运动性能和极低的运动噪声。
本设备应安装于空气流通,清洁明亮,无腐蚀气体的车间内。
在生产某些单调,频繁,和重复的长时间作业,或是危险环境下的作业。
适用的产品主要有:手机按键、印花、开关、连接器、电脑、数码产品、数码相机、MP3、MP4、电子玩具、喇叭、蜂鸣器、电子元器件、集成电路、电路板、LCD液晶屏、继电器、扬声器、晶振元件、LED灯、机壳粘接、光学镜头、机械部件密封等;适用胶水如:硅胶、EMI导电胶、UV胶、AB胶、快干胶、环氧胶、密封胶、热胶、润滑脂、银胶、红胶、锡膏、散热膏、防焊膏、透明漆、螺丝固定剂等;主要用途如:产品工艺中的粘接、灌注、涂层、密封、填充、点滴、线形/弧形/圆形涂胶等。
基于PLC的自动点胶装置控制系统设计
《装备维修技术》2021年第7期基于PLC的自动点胶装置控制系统设计樊一博(辽宁装备制造职业技术学院,辽宁 沈阳 110000)摘 要:随着时代的发展和电子工业自动化的出现,如何才能实现点胶过程的高效化以及精确化已经成为时代关注的热点话题,基于PLC的自动点胶装置的出现就是为了解决这一问题。
关键词:自动点胶机;PLC;控制系统引言:本文从点胶机的特点以及运动控制系统的控制要求进行分析,并结合实际情况制定了运动控制系统的控制方案,并从点胶机的传动方式、执行元件以及硬件设施指出如何才能够切实提高自动点胶机的应用效率。
1 点胶机简介随着电子工业的发展以及自动化的普及,为了提高在制造工序中所占时间最长、工作条件最恶劣的涂胶效率,基于PLC的自动点胶装置已经广泛地应用到生产中,形成了所谓的点胶机,点胶机是伴随着汽车工业小密封工艺的出现而出现的,最初变速箱、发动机壳体等密封采用纸垫,随着对密封性能要求的提高以及密封工艺的改进,在密封结合面上直接涂胶代替纸垫。
此外,在工业生产中,很多地方都要用到点胶,比如常见的集成电路、印刷电路板、彩色液晶屏等,传统的点胶是要靠工人手动操作完成的,自动化点胶机的出现,能够从根本上提高点胶的效率,并保证了点胶的精准性。
【1】2 运动控制系统的控制要求基于PLC的自动点胶装置控制系统可以实现对于点胶机点位运动和运动轨迹的控制,点位运动的特点就是当代加工物品移动时,点胶机不对其进行加工,这是只需要完成以最快的速度从一点移动到另一点并确定待点胶位置的任务即可。
点胶机的点位控制主要包括胶枪的原点回归和快速移动两个内容,点胶机在进行点位运动的过程中,需要保证点胶位置的准确性。
而点胶机的轮廓运动则是对两个或两个以上的运动坐标的位移和速度同时进行连续相关控制,使胶枪和需要被点胶物体之间的相对运动符合点胶的要求。
3 运动控制系统控制方案确定运动控制系统将会直接决定点胶机的行动,在整个点胶过程中都占据着非常重要的位置,点胶机的每一个工作状态都是由运动控制系统所决定的,都由相应的路线来控制,会对产品的涂胶质量产生巨大的影响,点胶机的运动控制系统需要完成点胶机上下机位通信、传递控制参数、状态监控以及数据处理等任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙源期刊网 http://www.qikan.com.cn
轨迹全自动扫描及涂胶技术
作者:武守胜
来源:《科技风》2018年第21期
摘要:本文介绍了一套变速器胶合面先轨迹扫描后涂胶的全自动控制系统,其主要由
PLC、供胶系统、机器人、视觉系统、激光传感器及其软件等几部分构成,该系统可根据变速
器胶合面位置的变动量,经由三维激光传感器采集轨迹信息,控制机器人做出涂胶轨迹修补,
从而避免了胶线位置偏差过大的问题,并利用视觉系统做涂胶后效果检查,确保不断胶、不漏
涂。此轨迹全自动扫描涂胶系统,进一步保证了变速器较高的密封性、紧固性。
关键词:轨迹扫描;机器人;涂胶;视觉系统
汽车变速器的密封性、紧固性是衡量汽车质量的重要指标之一,变速器涂胶更是变速器生
产过程中的一项重要环节。目前变速器壳体涂胶方案大多采用手动涂胶或多轴伺服机构自动涂
胶来实现,手动涂胶,操作人员劳动强度大,效率低,涂胶均匀性、一致性差;伺服机构自动
涂胶,由于胶线轨迹已预先由程序设定,而现实中变速器壳体胶合面形状复杂且窄小,以及壳
体模具磨损等因素,致使批量壳体的胶合面之间,存在不同程度的位置偏差,所以固定轨迹式
自动涂胶,难以保证胶线的准确性,为了提高变速器壳体的涂胶质量,引入轨迹扫描技术,预
先获取准确的轨迹之后涂胶。本文从系统结构、软硬件功能等方面对这一轨迹全自动扫描涂胶
系统做出详细介绍。
1系统整体结构
1.1机器人系统
机器人作为该系统的最终执行机构,要求其多角度动作,较高的重复定位精度,本系统选
用FANUCROBOTM20iA6轴机器人,负载能力20KG,重复定位精度±0.08mm,最大作业半
径1811mm,配备FANUC公司生产的智能运动控制系统R30iB机器人控制器,全数字伺服模
块给机器人6个关节轴的交流伺服电机提供驱动电源,完成直线插补和圆弧插补,外部I/O点
可随意扩展,开放式结构,可以与外围设备进行PROFIBUS、Ethernet、Devicenet等通信连
接,本系统分别采用PROFIBUS、Ethernet与主控PLC、激光扫描系统连接通信。
1.2人机界面主控系统
控制部分选用西门子S7300PLC、MP277触摸屏,PLC主要执行逻辑程序运算,共同与机
器人、供胶系统、视觉系统通信,控制启动机器人程序、涂胶系统、视觉系统,是整个系统的
核心部分。触摸屏作为一种人机交互方式,方便操作人员控制整个系统的运行、停止、手动、
自动切换,以及显示系统的整体运行情况,必要的报警信息提示等。
1.3供胶系统
龙源期刊网 http://www.qikan.com.cn
供胶系统选用具备加热保温功能的固瑞克PCF流体计量系统,该系统结合了闭环压力控
制功能,能够迅速改变胶滴的形状,采用可选流量计,系统会自动调节以应对作业环境的变
化,比如胶粘度、温度和喷嘴磨损,以维持所需的注胶速度,基于实际流率和所需流率的比
较,提供精确而持续的流量输出。该系统组件主要由控制中心、流体盘装置两部分组成,如图
2所示。
控制中心与PCF流体盘装置通信,以控制流体压力和分注阀操作,控制中心从PLC处接
收输入信号,并利用输入信号来确定与流体盘装置之间的通信,流体盘装置包括了控制及监控
流体分注的组件,流体调节器使用空气压力来控制流体压力,并会对电子指令产生快速反应,
保证了精确而持续的胶体流动。
1.4视觉系统
视觉系统共采用了4个高分辨率的COGNEX5403工业相机,对涂胶后效果检查判断,配
备使用InSightExplorer软件,利用其成熟的视觉工具、独特的运算方法,分析拍照图片,识别
胶线是否合格,是否有漏涂、断胶等不良现象,如果发现有涂胶不合格的变速器壳体,视觉系
统会发出报警提示,请求操作人员确认,并将所有图片发送到服务器电脑保存,便于后期追溯
查看。
2轨迹扫描技术
2.1传感器扫描原理
此激光传感器测量方式采用三角测量法,激光发射器通过镜头将可见红色激光射向被测物
体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距
离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机
之间的距离,数字信号处理器〗就能计算出传感器和被测物体之间的距离,传感器便可获取被
测物体的表面轮廓。三角测量法检测稳定,对被测物体的颜色、亮度等因素不敏感,但要求轮
廓表面要有关节点,如台阶、凹槽或斜面等,这样传感器才能根据距离差准确识别变化点的位
置。原理如图3所示。
传感器将获取到的轮廓表面信息传送到PC电脑,由基于多种算法的专用软件来分析处
理,根据轮廓表面类型不同,设置相应的关节点检测参数,计算出轮廓中关节点的坐标信息
(X、Y、Z),数据采集和计算是实时进行的,该部分功能受控于外部的机器人,因此所有的
计算结果都发送到机器人的控制器内。Joint坐标如图4所示。
2.2变速器轨迹扫描
本系统中实现对变速器壳体扫描使用的是德国FALLDORF三维激光传感器,其外围设备
主要由机器人、连接通信线、PC电脑、处理软件四部分组成。通讯关系如图5所示。
龙源期刊网 http://www.qikan.com.cn
由于变速器胶合面形状复杂且狭长,为保证胶线轨迹的精度,将变速器胶合面定义出88
个扫描采集点,传感器将检测到的胶合面倒角处的位置点信息上传到PC电脑,通过软件换算
得到相应的坐标信息,并将坐标信息发送到机器人,接下来结合机器人的运行程序将这88个
点位完成直线插补和圆弧插补,便形成了一条为涂胶而准备的轨迹,接下来控制供胶系统完成
涂胶作业。采集点如图6所示:
3引入轨迹扫描技术的意义
轨迹全自动扫描涂胶技术,利用三维激光传感器基于三角测量法,预先采集轨迹轮廓,优
化机器人涂胶轨迹算法,控制系统智能化、模块化、技术成熟、结构清晰、设计合理,使得该
系统具有较高稳定性、可靠性、准确性。相对手动涂胶方式节省了大量的涂胶时间,提升了涂
胶质量,相对固定轨迹式自动涂胶系统,进一步提升了涂胶轨迹的准确性、一致性,涂胶质量
得到了大幅提升,完美避免了因变速器胶合面尺寸波动而导致胶线位置偏差过大的问题,大大
保证了变速器合箱后良好的密封性,是一项值得推广的涂胶技术方案。
参考文献:
[1]王吉芳,郭桂兰,王锡俊.自动涂胶机的研制[J].制造业自动化,2001,23(6):4345.
[2]郗安民,刘颖,狄春良,邹静.汽车玻璃涂胶机器人工作站[J].机电产品开发与创新,
2004(5):3940.
作者简介:武守胜(1984),男,汉族,山东聊城人,本科,初级职称,研究方向:电气
自动化。