陀螺运动的力学原理
彩色陀螺的科学原理

彩色陀螺的科学原理
彩色陀螺,也叫陀螺玩具,是中国传统文化中流传已久的一种古老玩具,被称为“小孩子的爱”,今天,它仍被众多孩子投入其中,也被大量的大学生所喜爱。
那么,彩色陀螺的科学原理又是怎样的呢?
其实,彩色陀螺最根本的原理是物理力学原理。
它的内部结构由三个主要部分组成,分别是机轴、键轴和轮毂。
机轴围绕自身轴心自转,当它绕着键轴转动时,由于键轴的刚性,它就会使轮毂带动转动,这就是运动的本质特征。
在运动过程中,除了键轴的刚性,低速惯性也是彩色陀螺运动的重要组成部分,它是指物体维持其原有的运动状态,即做匀速直线运动的能力。
当物体由于外力或内力的作用而减慢速度,低速惯性就起作用了。
此外,还有一种力——摩擦力,进行运动时,摩擦力会使物体由原有运动状态发生变化,从而产生相应的曲率。
它又分为滑动摩擦力和磨擦力两种,滑动摩擦力使轮毂偏离正常运动状态,产生曲率,而磨擦力则会使轮毂不断减慢,最终停止运动。
总结以上,彩色陀螺运动的核心原理主要是物理力学原理,包括键轴的刚性、低速惯性和摩擦力,三者相互作用形成优秀的运动效果,让孩子们及大学生们游刃有余地尽情享受玩耍的快乐,也值得我们深入剖析。
关于陀螺的知识点
关于陀螺的知识点陀螺是一种古老而有趣的玩具,它以其旋转和平衡的特点而受到许多人的喜爱。
在这篇文章中,我们将逐步介绍陀螺的相关知识点。
1. 陀螺的定义陀螺是由一个旋转轴和一个或多个重量集中在轴上的圆盘组成的玩具。
通过给予陀螺旋转的动力,它可以保持平衡并旋转起来。
2. 陀螺的历史陀螺最早可以追溯到古代文明时期,它在许多文化中都有所存在。
事实上,陀螺最早的出现可以追溯到公元前3500年的埃及。
在过去的几千年里,陀螺在不同的文化中得到了广泛的应用和发展。
3. 陀螺的工作原理陀螺的运转涉及到一些基本的物理原理。
当陀螺旋转时,它的旋转轴保持在竖直方向上,这是因为陀螺的角动量守恒。
陀螺的旋转还涉及到陀螺效应,即旋转体在力矩作用下的稳定性。
4. 陀螺的稳定性陀螺的稳定性是指陀螺在旋转时保持平衡的能力。
陀螺的稳定性主要由其旋转轴的速度和旋转轴的角动量决定。
当陀螺旋转得足够快时,它就能够保持平衡并继续旋转。
5. 陀螺的运动方式陀螺的运动方式包括了预cession(进动)和nutation(章动)。
进动是指陀螺旋转轴围绕一个垂直于陀螺自身旋转轴的轴线进行缓慢旋转。
章动是指陀螺旋转轴的微小摆动。
6. 陀螺在科学中的应用陀螺的旋转和稳定性使得它在科学研究和应用中得到了广泛的应用。
陀螺仪是一种基于陀螺原理的仪器,可以用于测量和检测运动和方向。
陀螺还被用作惯性导航系统中的重要组成部分。
7. 陀螺的玩法和技巧陀螺作为一种玩具,有许多不同的玩法和技巧。
其中一些技巧包括陀螺的旋转、平衡和翻转。
通过练习和掌握这些技巧,人们可以展示出各种华丽的陀螺技巧。
8. 陀螺的益智教育价值陀螺不仅仅是一种玩具,它还具有益智教育的价值。
通过与陀螺的互动,人们可以学习到物理学、力学和平衡的基本原理。
此外,陀螺还可以培养人们的专注力、观察力和动手能力。
9. 陀螺的发展和改进随着科技的不断进步,陀螺也在不断发展和改进。
现代陀螺通常采用高科技材料和设计,以提高陀螺的旋转效果和稳定性。
陀螺是什么意思

陀螺是什么意思
陀螺是指绕一个支点高速转动的刚体。
陀螺是中国民间最早的娱乐工具之一,形状上半部分为圆形,下方尖锐。
从前多用木头制成,现代多为塑料或铁制。
玩时可用绳子缠绕,用力抽绳,使直立旋转。
陀螺在旋转的时候,不但围绕本身的轴线转动,而且还围绕一个垂直轴作锥形运动。
即陀螺并非垂直立于地面之上,而是对地面法线有一定的偏离,向地面有一些倾斜。
所以重力对陀螺的力矩不为零,而陀螺的进动角动量可以平衡重力矩的作用,所以陀螺在旋转时不会倒向地面。
扩展资料:
陀螺的应用
根据陀螺的力学特性研发了一种科学仪器陀螺仪,广泛运用于科研、军事技术等领域中。
1、激光陀螺
一种较为先进的陀螺仪,其原理为利用旋转时环形激光器发出的两道光束之间的频率差来测定角度、方位等。
激光陀螺仪被用于舰船、飞机等的导航和跟踪。
2、光纤陀螺仪
继激光陀螺后的新一代陀螺仪,其原理类似于激光陀螺仪,与激光陀螺仪相比,光纤陀螺仪没有闭锁问题,也不用在石英块精密加工出激光,成本较低。
3、速率陀螺仪
主要用来测量被测物体转动的速度以此推算出相应的数据,来达到测量的目的。
陀螺测斜仪是用来测量钻孔斜度和方位,主要运用于矿区、油田等。
陀螺仪的工作原理

陀螺仪的工作原理
陀螺仪是一种能够测量和保持物体角速度的装置。
它的工作原理基于刚体的转动动力学。
陀螺仪通常由一个旋转的转子和感应器组成。
转子被安置在一个可自由转动的轴上,并且具有较高的旋转速度。
感应器位于转子周围,并可以测量转子的旋转方向和速度。
当陀螺仪没有受到外部扰动时,转子会保持在一个固定的方向上旋转。
如果陀螺仪发生旋转,感应器会感知到这个旋转,并将旋转信息转化为电信号。
这些电信号可以被进一步处理和解读,以确定物体的角速度。
例如,在航空中,陀螺仪可以用来测量飞机的俯仰、横滚和偏转运动。
陀螺仪的工作原理基于角动量守恒定律。
当外部扰动作用于陀螺仪时,转子会产生一个与扰动方向垂直的力矩,试图让陀螺仪保持在原有的方向上旋转。
通过测量和分析转子的旋转变化,陀螺仪可以提供关于物体的方向和运动状态的重要信息。
因此,陀螺仪在许多领域中得到广泛应用,包括航空航天、惯性导航、无人机和虚拟现实等。
【毕业论文】陀螺运动及其稳定性
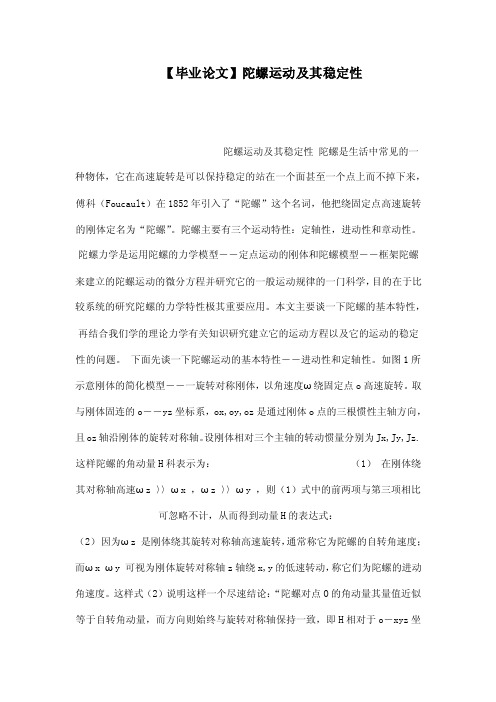
【毕业论文】陀螺运动及其稳定性陀螺运动及其稳定性陀螺是生活中常见的一种物体,它在高速旋转是可以保持稳定的站在一个面甚至一个点上而不掉下来,傅科(Foucault)在1852年引入了“陀螺”这个名词,他把绕固定点高速旋转的刚体定名为“陀螺”。
陀螺主要有三个运动特性:定轴性,进动性和章动性。
陀螺力学是运用陀螺的力学模型――定点运动的刚体和陀螺模型――框架陀螺来建立的陀螺运动的微分方程并研究它的一般运动规律的一门科学,目的在于比较系统的研究陀螺的力学特性极其重要应用。
本文主要谈一下陀螺的基本特性,再结合我们学的理论力学有关知识研究建立它的运动方程以及它的运动的稳定性的问题。
下面先谈一下陀螺运动的基本特性――进动性和定轴性。
如图1所示意刚体的简化模型――一旋转对称刚体,以角速度ω绕固定点o高速旋转。
取与刚体固连的o――yz坐标系,ox,oy,oz是通过刚体o点的三根惯性主轴方向,且oz轴沿刚体的旋转对称轴。
设刚体相对三个主轴的转动惯量分别为Jx,Jy,Jz.这样陀螺的角动量H科表示为:(1)在刚体绕其对称轴高速ωz 〉〉ωx ,ωz 〉〉ωy ,则(1)式中的前两项与第三项相比可忽略不计,从而得到动量H的表达式:(2)因为ωz 是刚体绕其旋转对称轴高速旋转,通常称它为陀螺的自转角速度;而ωx ωy 可视为刚体旋转对称轴z轴绕x,y的低速转动,称它们为陀螺的进动角速度。
这样式(2)说明这样一个尽速结论:“陀螺对点O的角动量其量值近似等于自转角动量,而方向则始终与旋转对称轴保持一致,即H相对于o―xyz坐标系是不变化的。
”这样可以借助角动量定理研究陀螺的基本特性。
角动量定理相对于o―xyz 的欧拉方程为:(3)式中的M为作用在陀螺上的外力矩。
由于H相对于o―xyz不变,所以式(3)中的一项dH/ dt=0,则上式又可写为(4)ω,H,M三者的关系可如图2表式。
如上图,在x轴方向施加外力矩M,则H 将绕y轴以角速度ω转动,称之为陀螺的“进动运动”,这就是陀螺的进动性,是陀螺的一个最重要的特征。
关于陀螺运动原理的力学分析

离 y轴 的距离 为、 / , L 2 + r 2 ,c点也是
 ̄ /L 2 + r 2 ,b点 离 y轴 距 离 为 L ,d
公转 线速 度 的变பைடு நூலகம்化产 生 的力 。
下 ,并 且解 释 发生 进 动 和章 动 现 象 的
度 方 向为 f 点 所 处 的 切 线 方 向 ,a点 到 b点 公 转 速 度 在 一直 减 小 ,所 以 e
陀螺 的运动 ,所 以这 里将速度分解 ,
只 讨论 质 点 公 转速 度 的 变化 ,公转 速 度 大 小变 化 由两个 原 因 产生 ,第一 因
位置最低 ,b与 d是最 左最 右的点 ,线
点 ,a到 b之 间质点 在 角速 度 为 w 这
一
时 刻都 在 做 减速 运 动 ,质 点 做 减速 如图 2 所 示 , 圆 O1 为 陀螺 点 e 与f 绕 y轴公 转 轨迹 ,由于 线段 e f 平 行线段 a c ,所 以 e f 两 点 处 于 同一 公 转 的 圆形轨 道 ,分 析 e 与f 受 力情 况 。 首 先考 虑 两点 公转 线速 度大 小 变
以 加速 度 大 小 相 同 ,所 以 f l等于 f 2 ,
陀螺运动产生影响,所 以不考虑离心 产生 一 个垂 直 于斜 下方 向并且 朝 向运
力 ,只讨 论公转 线速 度变化产生 的力 。
如 图 4所 示 a b c面 受 垂直 陀螺 面
动方 向左侧 的 力 ,所 以 当陀螺 朝 向一
系中旋转,圆 0 代表陀螺旋转面 ,线 绕 圆 心 O 的 自转 , 由于 自转 不 会 影响
20陀螺PPT课件(2024)

15
惯性导航系统概述
01
惯性导航系统(INS)定义
一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。
2024/1/30
02
INS基本原理
利用陀螺仪和加速度计等惯性元件来测量运载体本身的加速度,经过积
分和运算得到速度和位置,从而达到对运载体导航定位的目的。
03
INS特点
隐蔽性好、抗干扰能力强、数据更新率高,但存在误差积累问题。
24
VR/AR设备运动跟踪与姿态识别
头部跟踪
陀螺仪可实时检测用户头 部的角速度和加速度,实 现VR/AR设备中的头部跟 踪功能。
2024/1/30
手势识别
结合陀螺仪数据与图像识 别技术,可实现VR/AR设 备中的手势识别功能,增 强用户体验。
场景渲染
陀螺仪数据可用于优化 VR/AR场景中的渲染效果 ,提高画面流畅度和真实 感。
陀螺原理
当陀螺受到外力作用时,其自转轴将 绕某一固定点(支点)作进动,且进 动角速度与外力矩成正比,而与陀螺 的转动惯量成反比。
2024/1/30
4
陀螺分类及应用领域
2024/1/30
陀螺分类
根据工作原理和结构特点,陀螺 可分为机械陀螺、光学陀螺、微 机械陀螺和原子陀螺等。
应用领域
陀螺在航空、航天、航海、兵器 、汽车、机器人等领域有着广泛 的应用,如惯性导航、姿态控制 、稳定平台等。
21
典型案例分析:无人机飞行姿态稳定控制
无人机飞行姿态稳定控 制需求
陀螺仪在无人机姿态稳 定控制中应用
无人机姿态稳定控制效 果评估
无人机在飞行过程中需要保持稳定的 姿态,以确保其正常飞行并完成任务 。因此,需要通过稳定控制系统对无 人机的姿态进行控制。
陀螺定向运动方程的动静法推导
陀螺定向运动方程的动静法推导陀螺的定向运动方程是用来描述陀螺的旋转运动方式,也是机器人控制学中建模与控制陀螺的基本方法。
因此,推导陀螺定向运动方程的动静法是机器人控制学中基础性的理论研究内容。
本文针对陀螺定向运动方程,以动静法推导其运动方程并进行分析。
一、动静法推导原理动静法推导是一种常用的推导转换运动方程的方法,其原理是认为动力学和静力学是一种衔接的概念,即当物体静止时,它的位置是定义的;而当物体的运动是持续的,那么转换过程也是持续的,类似于动力学和静力学之间的衔接过程。
二、陀螺定向运动方程动静法推导(1)给定机器人陀螺在时刻t的角速度Ωt=(ω1t,ω2t,ω3t),给定机器人陀螺在t0(t0<t)时刻的角度令θ0=(θ1,θ2,θ3),则机器人陀螺的角度应满足:θt-θ0=∫t0tdωt(2)将角速度Ωt由旋转坐标系推导到全局坐标系表示:Ωt=R(t)*ω=R(θt)*ω(3)将(2)代入(1)得到:θt-θ0=∫t0tdR(θt)ω(4)在机器人控制学中,一般R(θt)称为运动变换矩阵,根据矩阵乘法求得:θt-θ0=∫t0td[R(θt)*ω](5)最终可得到机器人陀螺的定向运动方程:R(θt)*θt=ω三、陀螺定向运动方程分析陀螺定向运动方程可用于描述机器人陀螺的旋转方式,可以利用陀螺定向运动方程进行诸如机器人三轴陀螺的传动带动等控制。
此外,陀螺定向运动方程的位置模型的推导也十分重要,可以利用陀螺定向运动方程推导出位置模型指令,从而实现机器人的定点控制等功能。
四、结论本文通过动静法推导了机器人陀螺的定向运动方程,并对其分析了应用效果。
以上研究对于机器人控制学的深入理解和应用都有重大意义,可以为机器人控制陀螺的更高精度控制提供参考依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺运动的力学原理
1. 角动量守恒,根据角动量守恒定律,陀螺在没有外力作用时,其角动量大小和方向保持不变。
当陀螺开始旋转时,它会产生角动量,并且保持旋转的方向和速度。
这是因为陀螺的自转轴在旋转过
程中保持不变,而自转轴的方向决定了陀螺的角动量方向。
2. 陀螺稳定性,陀螺具有稳定性是因为陀螺的自转轴具有陀螺
进动的特性。
陀螺进动是指陀螺自转轴在重力和陀螺支撑力的作用下,以一个圆锥面为轨道进行进动运动。
这个进动运动使得陀螺保
持平衡,即使受到外力的扰动,陀螺也会倾向于保持自身的旋转轴
方向。
3. 陀螺预cession(进动),陀螺的进动是由于陀螺的自转轴
在受到外力矩的作用下发生的。
当陀螺受到外力矩时,自转轴会发
生进动,即自转轴的方向会绕着一个圆锥面进行旋转。
这种进动使
得陀螺能够保持平衡,并且能够抵抗外力的扰动。
4. 角速度和角加速度,陀螺的旋转速度可以用角速度来描述,
角速度是指单位时间内陀螺旋转的角度。
陀螺的旋转速度可以通过
施加外力或改变陀螺的形状来改变。
同时,陀螺的旋转加速度可以
用角加速度来描述,角加速度是指单位时间内角速度的变化率。
陀
螺的旋转加速度会影响陀螺的稳定性和进动特性。
综上所述,陀螺运动的力学原理涉及角动量守恒、陀螺稳定性、陀螺进动以及角速度和角加速度等因素。
这些原理相互作用,共同
决定了陀螺的运动状态和特性。