交流伺服系统转动惯量及负载转矩的辨识方法研究
伺服电机的惯量负载

伺服电机的惯量负载一、进给驱动伺服电机的选择1 •原则上应该根据负载条件來选择伺服电机。
在电机轴上所有的负載有两种.即阻尼转矩和惯址负载。
这两种负载都耍正确地il•算.其值应满足下列条件:1)7机床作空载运行时.在整个速度范碉内.加在伺服电机轴上的负載转矩应在电机连续额定转矩范囤内•即应在转矩速度特性曲线的连续工作区。
2)最大负载转矩.加载周期以及过载时间都在提供的特性曲线的准许范憎以内。
3)电机在加速/减速过程中的转矩应在加减速区(或间断工作区)之内。
4)对要求频繁起•制动以及周期性变化的负载.必须检査它的在一个周期中的转矩均方根值。
并应小于电机的连续额定转矩。
5)加在电机轴上的负載惯虽:大小对电机的灵墩度和整个伺服系统的精度将产生影响。
通常,半负載小于电机转子惯址时•上述影响不大。
但十负载惯虽达到甚至超过转子惯址的5倍时.会使灵敬度和响应时间受到很大的影响。
甚至会使伺服放大器不能在正常调节范困内工作。
所以对这类惯址应避免使用。
推荐对伺服电机惯虽Jm和负戦惯址J1之间的关系如下:Jl<5XJm1、负载转矩的计算负载转矩的汁算方法加到伺服电机轴上的负载转矩讣算公式•因机械而异。
但不论何种机械.都应计算岀折算到电机轴上的负载转矩。
通常,折算到伺服电机轴上的负載转矩可由下列公式计算:Tl=(F*L/2n U)十TO式中:T1折算到电机轴上的负载转矩:F:轴向移动工作台时所需要的力:L:电机轴每转的机械位移虽(M):To:滚珠丝杠螺母•轴承部分摩擦转矩折算到伺服电机轴上的值:M:驱动系统的效率F:収决于匸作台的重虽,摩擦系数,水平或垂直方向的切削力.是否使用「平衡块(用在垂直轴)。
无切削时:F=P*(W+fg),切削时:F=Fc+p*(W+fg+Fcf)oW:滑块的重虽(丄作台与工件)Kg:M:摩擦系数:Fc:切削力的反作用力:Fg:用镶条固紧力:Fcf:由于切削力靠在滑块表而作用在匸作台上的力(kg)即工作台压向导轨的正向压力。
电机拖动系统负载转动惯量辨识方法综述

电机拖动系统负载转动惯量辨识方法综述 下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢! 并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注! Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you! In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!
电机拖动系统负载转动惯量辨识方法的综述 电机拖动系统在工业自动化和精密控制中起着至关重要的作用。其中,负载转动惯量是影响系统动态性能的关键参数之一。准确地辨识负载转动惯量对于优化控制策略、提高系统稳定性及效率具有重要意义。本文将对电机拖动系统负载转动惯量的辨识方法进行综合概述。 1. 基于数学模型的辨识方法 这种方法主要利用系统的数学模型,通过输入输出数据来估计负载转动惯量。例如,基于PID控制的开环或闭环系统,可以通过调整控制器参数,使系统在阶跃响应或脉冲响应中的性能最优,从而推算出负载转动惯量。这种方法简单易行,但对模型的精确性要求较高。
基于朗道离散时间递推算法的转动惯量辨识研究

Re e r h n I e ta I n iia i n Ba e n La da s a c o n r i de tfc to s d o n u Dic e e tm e Re u sv g rt s r t -i c r i e Alo ihm
T ENG F l IHo gh n HA ui ,L n s e g ,Z NG in u HAN W e n J h a ,Z a G i ,W AN Ja h a G in u
收 稿 日期 :2 1— —1 0 10 2 4
平均 电磁转矩 ,然后计算转动惯量值。而在线式转 动惯量辨识 需要利用现代控制理论 的知识 和方法 , 计算 比较复杂 ,程序量大 , 目前主要还处 于仿真分
析 阶段 。
所谓离线式参数 自整定指的是在系统运行之前 进行 的参数 自整定 ,通常是在出厂实验 和现场安装 完成后进行 ,或者在 电动机变频调速 系统合上 电源 之后 、控 制程 序运 行 之 前 运 行 一 段参 数 自整 定 程 序 进行参数测试 ,并将测得 的参数提供 给控制程序使 用 。其过程中,时间的测量精度 ,平均 电磁转矩 J 的测量精度都直接影响了转动惯量辨识 的精度。但 实际中保证平均 电磁转矩 的测量精度很 困难 ,所 以
p s d i h sp p rt mp o e i e t c t n p e ie a d t u c h r c s . o e n t i a e o i r v d ni a i r cs n o q i k te p o e s i f o Ke r s e v y t m ;i e i d n i c t n;L n a i r t — me r c rie ag r h y wo d :s ro s s e n r a i e t ai t i f o a d u d s e e t e u sv o i m c i l t
伺服系统转动惯量辨识及控制器PI参数优化

No.4Apr.2021第4期2021年4月组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing Techninue文章编号:1001 -2265(2021)04 -0096 -04DOI : 10.13462/j. cnki. mmtamt. 2021.04. 023伺服系统转动惯量辨识及控制器PI 参数优化孙彦瑞,苏成志(长春理工大学机电工程学院,长春130000)摘要:在机器人运行时,为了使伺服电机在最优性能下达到目标速度、在工作过程中有着更强的抗 扰动能力,并避免出现震荡、谐振的状况,从而造成机器人运行时动态稳定性严重降低。
提出一种 基于非线性动态学习因子的粒子群优化算法,对普通粒子群优化算法进行改进。
该算法以伺服系 统控制模型中的速度控制器为核心,实时辨识负载转动惯量值,使伺服系统内部控制参数根据实际 工况调节;运用该辨识值,通过计算得到速度控制PI 参数值,并实时修正速度控制器PI 参数值。
MATLAB/SIMULINK 仿真结果表明,与传统的粒子群优化算法相比,无论在电机启动过程中、还是 负载扰动下,该方法都具有更快的响应速度、更高的控制精度以及更强的抗干扰能力。
关键词:转动惯量;非线性动态学习因子;粒子群优化算法;速度控制器PI 参数中图分类号:TH166 ;TG506 文献标识码:AServo System Inertia IdenhPcahon and Controller PI Parameter OptimizationSUN Yan-rui , SU Cheng-zhi(School of Mechanical and Electrical Engineering , Changchun Univvrsity of Science and Technolo/y , Changchun 130000, Ch/ia )Abstrach : During the operation of the robot , in order to make the servo motor achieve the target speed un der the optimal performance , and have stronger anti-disirbance ability in the working proces s , and to a void the prob —m of vibration and resonance , resulting in a serous reduction in the dynamic stability of the robot. The coniol model of servo motor is analyzed , and a particle swarm optimization algorithm based on nonlmear dynamic learning factor is proposed. The algorithm ties the speed conioller in the servo system coniol model as the core , and can identify the loadz moment of inertia in real time , so that the internaicontrol parameters of the s ervo system can be adjusted according to the acial condbions. By using the i dentification value , the PI parameter value of the speed control is obtained through calculation , and the PI parameter value of the speed conioller is corrected in real time. The results of MATLAB/SIMULINK sim ulation show that compared with the traditional pakWle swarm optimization algorithm , this method has fas ter response speed , higher control accuracy and stronger anti-interference ability , whether in the motorsha+hing p+oce s o+unde+hheload dishu+bance.Key wois : moment of inertia ; nonlinear dynamic learning factor ; particle swarm optimization tgoriim ; speed conho l e+PIpa+amehe+0引言机器人在运行时,每个轴的负载转动惯量与负载 扭矩随着机器人的姿态的变化而变化;伺服系统对负 载转动惯量的辨识精度、辨识快慢,决定着伺服系统运 行的稳定性、精确性与快速性。
如何计算伺服系统的负载惯量

如何计算伺服系统的负载惯量伺服系统的负载惯量是指伺服系统中负载的惯性量度,通常是指连接到伺服电机轴上的负载,它对伺服系统的动态响应和控制性能有着重要的影响。
准确计算伺服系统的负载惯量对于设计和调试伺服控制系统至关重要。
本文将介绍如何计算伺服系统的负载惯量的方法与注意事项。
一、定义与背景负载惯量是指物体在运动过程中所具有的抵抗改变其运动状态(包括速度和方向)的特性,它取决于负载本身的质量以及其相对于旋转中心的分布情况。
在伺服系统中,负载惯量的大小直接影响到伺服电机的加速度和速度的变化,进而影响到伺服系统的动态响应和稳定性。
二、计算方法要计算伺服系统的负载惯量,需要进行以下步骤:1. 确定负载的形状:负载的形状可以是简单的几何形状,如圆盘、柱体,也可以是复杂的形状,如非均匀分布的物体。
根据负载的实际形状,选择合适的计算方法。
2. 测量负载的质量:使用天平或其他称重工具,准确地测量负载的质量。
注意需要将支撑负载的结构(如轴承、装置等)的质量排除在外。
3. 确定负载的旋转轴:确定负载围绕哪个轴旋转,即负载的旋转轴。
通常情况下,负载的旋转轴与伺服电机的旋转轴是一致的。
4. 计算负载惯量:根据负载的形状和质量,使用相应的公式计算负载惯量。
对于简单的几何形状,如圆盘或柱体,可以使用基本的几何形状的惯量计算公式。
而对于复杂的形状,可以使用数值模拟或有限元分析等方法进行计算。
5. 考虑附加部件的负载惯量:在计算负载惯量时,还需要考虑与负载连接的附加部件的惯量。
附加部件的惯量可以通过测量或者查阅相关文献获得,然后根据实际连接方式进行叠加计算。
三、注意事项在计算伺服系统的负载惯量时,需要注意以下几点:1. 准确测量负载的质量:负载的质量是计算负载惯量的基础,需要使用准确的称重工具进行测量。
排除与负载支撑结构的质量。
2. 考虑负载的非均匀分布:对于负载不均匀分布的情况,需要将负载分割成多个部分,分别计算每个部分的惯量后再进行叠加计算。
伺服电机的选型和转动惯量的计算

伺服电机的选型和转动惯量的计算引言:伺服电机是一种能够实现精确定位和速度控制的电动机。
在自动化控制系统中,伺服电机广泛应用于机械装置的定位与运动控制,如机床、工业机械手臂、机器人等。
为了确保控制系统的性能和稳定性,正确选型和计算转动惯量是非常重要的。
一、伺服电机选型1.负载特性分析:首先需要对负载特性进行分析,包括负载的质量、摩擦系数、惯性矩等。
这些参数影响到伺服电机的选择,如电机的额定转矩等。
在分析负载特性时需要考虑静态特性和动态特性。
2.运行速度要求:根据系统的运行速度要求,选择电机的额定转速。
如果要求快速响应,需要选择具有较高转速的电机;如果要求大转矩输出,需要选择具有较大额定转矩的电机。
3.控制方式:根据系统的控制方式,选择合适的伺服电机。
常见的控制方式有位置控制、速度控制和力控制。
不同的控制方式对电机的性能要求也不同。
4.转矩和转速曲线:了解电机的转矩和转速曲线,可以帮助选择合适的伺服电机。
转矩曲线决定了电机能够产生的最大转矩,转速曲线决定了电机能够输出的最大转速。
5.电机功率:根据负载特性和运行速度要求,计算出所需的电机功率。
一般情况下,应选择稍大于所需功率的电机,以保证系统的可靠性和安全性。
6.品牌和价格:最后根据伺服电机的品牌和价格进行选择。
国际知名品牌的产品质量较高,但价格也较高。
可以根据实际需求和预算进行选择。
转动惯量是描述物体抗拒改变转动状态的特性。
在伺服电机的选型和控制系统设计中,转动惯量是一个重要的参数。
计算转动惯量的一般公式为:J=m*r^2其中,J是转动惯量,m是物体的质量,r是物体相对转轴的距离。
如果物体是一个均匀的圆盘或圆柱体,根据其几何形状可以通过以下公式计算转动惯量:J=1/2*m*r^2其中,m是物体的质量,r是物体的半径。
如果物体是由多个部分组成,可以通过将各部分的转动惯量相加得到整体的转动惯量。
在实际应用中,还需要考虑其他因素对转动惯量的影响,如内部零件的分布、负载的摩擦系数等。
永磁同步电动机伺服系统转动惯量辨识
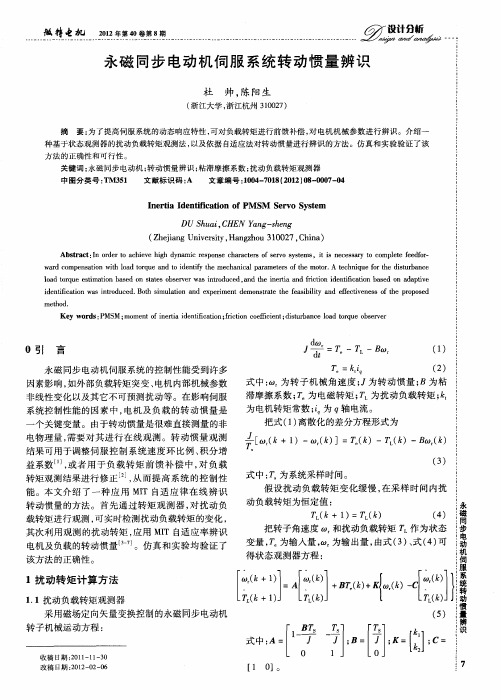
I e ta I n i c tO fPM S e v se n r i de tf a i n O M S r o Sy t m DU hu i C S a , HEN a g- h n Y n seg
( hj n nvri , n zo 0 7, hn ) Z ei gU i sy Hagh u3 0 2 C ia a e t 1
l — —o , 警= T B LJ
T =ki e t
( 1 )
() 2
Байду номын сангаас
式 中 : 为转 子 机 械 角 速度 ; 转动 惯 量 ; J为 B为粘 滞摩 擦 系数 ;e 电磁 转矩 ;L为扰 动 负载 转矩 ; T为 T k
为 电机转 矩 常数 ; 为 q轴 电流 。 。 把式 ( ) 1 离散化 的差 分方 程形式 为
个 关键 变量 。由于转 动惯 量是很 难直 接测 量 的非
1
电物 理量 , 需要 对 其 进 行 在线 观 测 。转 动 惯 量 观 测 结果 可用 于调 整伺 服 控 制 系 统速 度 环 比例 、 分 增 积 益 系数 … , 者 用 于 负 载 转 矩 前 馈 补 偿 中 , 负 载 或 对 转矩 观测 结果 进行 修 正 J从 而 提 高 系统 的控 制性 , 能 。本文 介 绍 了 一 种 应 用 MT 自适 应 律 在 线 辨识 I
种基于状态观测器 的扰动负载转矩观测法 , 以及依据 自适应法对转动惯量进行辨识 的方法 。仿真和 实验验证 了该
方 法 的正 确 性 和可 行 性 。
关键词 : 永磁同步电动机 ; 转动惯量辨识 ; 粘滞摩擦系数 ; 扰动 负载转矩 观测器
中 图分 类 号 : M3 1 T 5 文献标识码 : A 文 章 编 号 : 0 — 08 2 1 )8 0 0 — 4 1 4 7 1 ( 02 0 - 07 0 0
伺服电机惯量如何确定

信很多人都清楚,伺服电机在选型及调试中,除考虑电机的扭矩和额定速度等等因素外,还有一项重要的参考指标,就是常常会碰到的惯量匹配问题。
那么伺服电机惯量要怎么匹配确定呢?
惯量匹配对于伺服电机选型很重要的,传动惯量对伺服系统的精度,稳定性,动态响应都有影响。
惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。
不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。
通过以上内容可知,惯性匹配的确定需要根据机械的工艺特点及加工质量要求来确定。
通常伺服电机的小惯量的高速往复好,大惯量的本身惯量大,而对于基础金属切削机床,一般负载惯量建议应小于电机惯量的5倍。