基于稳健优化的真空断路器弹簧操动机构分闸弹簧设计
CT10弹簧操动机构使用说明书
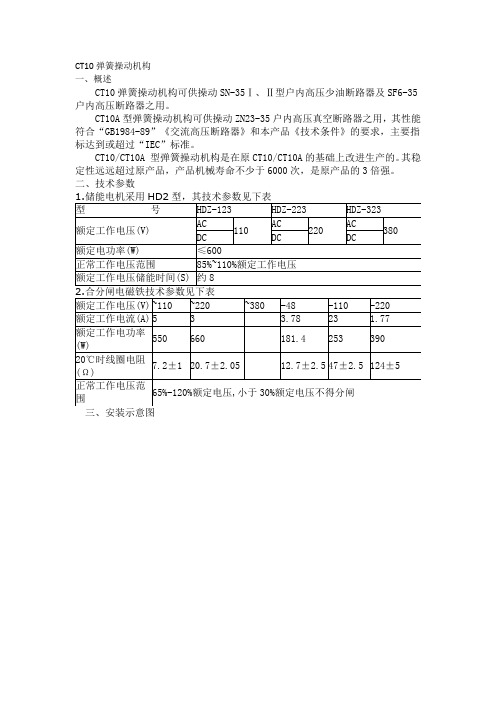
二、技术参数
1.储能电机采用HD2型,其技术参数见下表
型 号
HDZ-123
HDZ-223
HDZ-323
额定工作电压(V)
AC
110
AC
220
AC
380
CT10弹簧操动机构
一、概述
CT10弹簧操动机构可供操动SN-35Ⅰ、Ⅱ型户内高压少油断路器及SF6-35户内高压断路器之用。
CT10A型弹簧操动机构可供操动ZN23-35户内高压真空断路器之用,其性能符合“GB1984-89”《交流高压断路器》和本产品《技术条件》的要求,主要指标达到或超过“IEC”标准。
20℃时线圈电阻(Ω)
7.2±1
20.7±2.05
12.7±2.5
47±2.5
124±5
正常工作电压范围
65%-120%额定电压,小于30%额定电压不得分闸
三、安装示意图
DC
DC
DC
额定电功率(W)
≤600
正常工作电压范围
85%~110%额定工作电压
额定工作电压储能时间(S)
约8
2.合分闸电磁铁技术参数见下表
额定工作电压(Βιβλιοθήκη )~110~220
~380
-48
-110
-220
额定工作电流(A)
5
3
3.78
23
1.77
额定工作电功率(W)
550
660
181.4
253
390
断路器弹簧操动机构的仿真分析及试验研究

断路器弹簧操动机构的仿真分析及试验研究【摘要】断路器弹簧操动机构在电力系统中起着至关重要的作用,影响着系统的稳定性和可靠性。
本文通过对断路器弹簧操动机构的仿真分析及试验研究,旨在探讨其结构特点、工作原理和性能表现。
首先对断路器弹簧操动机构的结构进行了分析,然后利用仿真技术模拟了其工作原理,接着设计了相关试验并进行了实施。
通过对试验结果的分析与比较,得出了一些结论并进行了讨论。
最后提出了对断路器弹簧操动机构的优化和改进建议,展望了研究成果的应用前景。
本文旨在为断路器弹簧操动机构的进一步研究和发展提供参考,促进电力系统的稳定性和可靠性提升。
【关键词】断路器,弹簧操动机构,仿真分析,试验研究,结构分析,工作原理,试验设计,试验结果分析,优化,改进建议,应用前景,总结。
1. 引言1.1 研究背景断路器是供电系统中的重要保护设备,用于切断电路故障,确保电网运行安全稳定。
断路器弹簧操动机构作为断路器的核心部分,直接影响断路器的动作性能和可靠性。
随着电力系统的发展和智能化要求的提高,断路器弹簧操动机构的研究越来越受到关注。
目前,国内外对断路器弹簧操动机构的仿真分析和试验研究已经取得了一定的成果,但仍存在一些问题和不足之处。
对断路器弹簧操动机构的结构特性和工作原理缺乏系统性的分析,试验设计和实施过程中存在一定的局限性,试验结果的分析与仿真模拟的对比不够充分等。
本研究旨在对断路器弹簧操动机构进行深入的分析和研究,通过仿真模拟和试验验证相结合的方法,探讨其工作原理和性能特点,为进一步优化和改进断路器弹簧操动机构提供理论支持和技术指导。
通过对研究成果的应用前景展望,为电力系统的安全稳定运行和智能化发展提供新的思路和方法。
1.2 研究目的本文的研究目的是对断路器弹簧操动机构进行仿真分析和试验研究,通过结合理论分析和实际测试,深入探讨其工作原理和性能特点。
我们旨在通过研究,为断路器弹簧操动机构的优化设计提供理论基础和技术支持,提高其可靠性和安全性。
CT19BW型弹簧操作机构

CT19BW型弹簧操作机构
概述:
CT19BW(N)型弹簧操作机构是在元CT19型弹簧操作机构的基础上,针对35kV真空断路器进行加强、改进和完善的,其机械强度、稳定性及可靠都有较大的提高。
CT19BW型可供操动各种户外柱上式35KV真空开关柜(ZW7),其性能符合GB1984《交流高压真空断路器》和本产品《技术条件》的要求,各项指标均达到和超过“IEC”标准。
机构合闸弹簧的储能方式有电动机储能和手动储能两种;分闸操作有分闸电磁铁、过电流脱口电磁铁及手动按钮操作三种;合闸操作有合闸电磁铁及手动按钮操作两种。
4、脱扣的组合及代号:110、100、111、114、1114、400
安装位置示意图:。
弹簧操动机构与永磁操动机构的比较
弹簧操动机构与永磁操动机构的比较弹簧操动机构与永磁操动机构的比较3.1 动作原理和结构真空断路器永磁机构原理图见图1,弹簧机构见图2。
目前用于中压断路器操动机构主要有电磁式和弹簧式两种。
电磁操动机构在真空断路器发展初期得到了广泛应用,这是由于电磁操动机构较好地迎合了真空灭弧室的要求:一是开距小(8-25mm),二是在合闸位置需要大的操动力(2000-4000N/相)。
然而电磁操动机构也存在不容忽视的缺点,磁路电感L在合闸过程中变化较大,产生反电动势,从而抑制了合闸线圈电流的增大,而且这种抑制作用随着合闸速度增加而增强。
相比之下,弹簧操动机构采用于手动或小功率交流电动机储能,其分合闸速度不受电源电压波动影响,相当稳定,能够获得较高的分合闸速度,能实现快速自动重合闸操作,在一定程度上克服了电磁操动机构的缺点。
然而弹簧操动机也存在以下缺点:完全依靠机械传动,零部件数量多,一般弹簧操动机构有上百个零件,且传动机构较为复杂,故障率较高,运动部件多,制造工艺要求较高。
另外,弹簧操动机构的结构复杂,滑动摩擦面多,而且多在关键部位,在长期运行过程中,这些零件的磨损、锈蚀以及润滑剂的流失、固化等都会导致操作失误。
近年来,一种用于中压真空断路器的永磁保持、电子控制的电磁操动机构(简称永磁机构)备受关注。
和传统的断路器操动机构相比,永磁机构采用了一种全新的工作原理和结构,工作时主要运动部件只有一个,无需机械脱扣、锁扣装置,故障源少,具有较高的可靠性。
3.2 操动机构与真空断路器的配合3.2.1 力-行程特性多年来,真空断路器一直在努力追求着一种完美操动的机构:结构简单,寿命长,可靠性高,可以用小功率交流电源操作,出力特性与真空断路器的反力特性很好地匹配,能给出稍低的合闸速度和较高的分闸速度的操作机构。
真空断路器触头行程很小,合闸过程中在触头接触前只需要很小的驱动力,一旦触头闭合,就需要较大的驱动力,来压缩触头弹簧以获的足够的触头压力。
断路器弹簧操动机构脱扣线圈的优化设计

断路器弹簧操动机构脱扣线圈的优化设计张永辉;高正付;王志峰【摘要】断路器弹簧操动机构的脱扣性能直接决定着断路器的分合闸特性,间接影响着整个断路器的美合、开断性能.而断路器弹簧操动机构的脱扣线圈直接决定着其脱扣性能,这里以某断路器机构为例简单介绍脱扣线围的优化设计.【期刊名称】《技术与市场》【年(卷),期】2012(019)008【总页数】1页(P105)【关键词】断路器;弹簧操动机;优化设计【作者】张永辉;高正付;王志峰【作者单位】平高集团有限公司,河南平顶山467001;平高集团有限公司,河南平顶山467001;平高集团有限公司,河南平顶山467001【正文语种】中文根据GB/T110022规定,对断路器机构的脱扣线圈动作特性要求较严:并联合闸脱扣器在合闸装置额定电源电压的85%到110%(交流)或80%到110%(直流)范围内应该正确的动作。
我们以某断路器机构分闸脱扣器线圈为例,简单介绍断路器机构脱扣线圈的优化设计。
1 脱扣装置的结构及工作原理弹簧操动机构中分闸脱扣装置的结构示意如图1。
图1 分闸脱扣装置结构示意图1-动力元件;2-传动元件;3-定位元件;4-保持元件在初始位置时,动力元件1储存分闸弹簧能量,传动元件2将能量传递给保持元件4,保持元件4在定位元件3的作用下保持不动。
弹簧能量在各零部件之间构成力与力矩的平衡。
当进行脱扣操作时,通过分闸电磁铁给保持元件4逆时针的转动力矩,打破零部件之间的力平衡,动力元件1在原动力的作用下失去阻碍力进行顺时针转动,从而达到脱扣装置的动作要求。
通过分析知道,保持元件4的脱扣力与动力元件1的原动力仅是力与力矩的传动关系。
他们基本上近似呈线性关系,忽略传动损失和摩擦的影响,通过受力分析计算和试验验证,基本上可以确定分闸电磁铁所需的电磁力要求。
2 线圈的优化设计根据某断路器弹簧操动机构分闸脱扣力的计算与试验验证最终确定为至少40 N。
该机构使用Ⅲ型电磁铁,根据Ⅲ型电磁铁的电磁力确定线圈安匝数其中S:Ⅲ型电磁铁磁通截面积;δ:空气隙长度;I:线圈电流;N:线圈匝数。
CT19弹簧操动机构
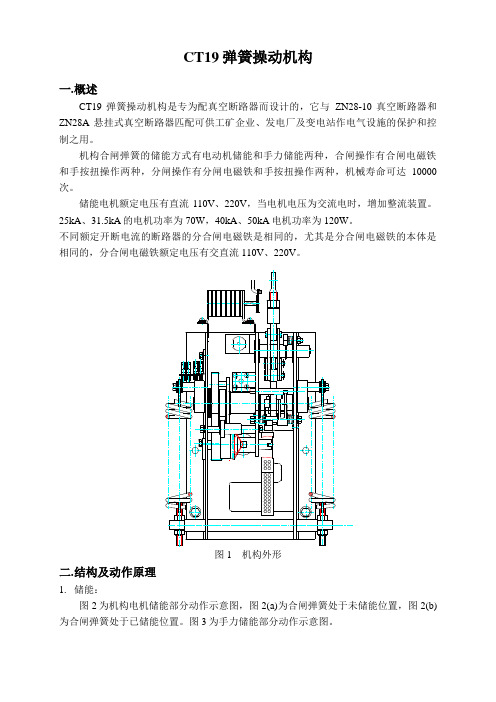
CT19弹簧操动机构一.概述CT19弹簧操动机构是专为配真空断路器而设计的,它与ZN28-10真空断路器和ZN28A悬挂式真空断路器匹配可供工矿企业、发电厂及变电站作电气设施的保护和控制之用。
机构合闸弹簧的储能方式有电动机储能和手力储能两种,合闸操作有合闸电磁铁和手按扭操作两种,分闸操作有分闸电磁铁和手按扭操作两种,机械寿命可达10000次。
储能电机额定电压有直流110V、220V,当电机电压为交流电时,增加整流装置。
25kA、31.5kA的电机功率为70W,40kA、50kA电机功率为120W。
二.结构及动作原理1.储能:图2为机构电机储能部分动作示意图,图2(a)为合闸弹簧处于未储能位置,图2(b)为合闸弹簧处于已储能位置。
图3为手力储能部分动作示意图。
图2 机构电机储能部分动作示意图a. 电机储能过程如下:如图2示电机通过小齿轮2带动大齿轮3按图示方向转动,大齿轮与储能轴7是空套的,因此,在储能开始时电机只带动大齿轮作空转,当转到固定在大齿轮上的拨叉9与固定在储能轴上的驱动块4卡上以后,大齿轮就通过驱动块带动储能轴也按图示方向转动,挂簧拐臂6与储能轴是键联结,储能轴的转动带动了挂簧拐臂也按图示箭头方向转动,将合闸弹簧15拉长,当合闸弹簧过中后,固定在与储能轴键联结的凸轮8上的滚轮5就紧压在定位板13上,将合闸弹簧的储能状态维持住,储能结束。
在挂簧拐臂过中的同时,一方面挂簧拐臂推动行程开关切断储能电机电源,另一方面固定在中侧板与左侧板之间的轴承14将驱动块上的拨叉顶起保证驱动块与大齿轮可靠脱离,这样,即使电机继续转动也不会将图3 手力储能部分动作示意图(a )合闸弹簧未储能 (b )合闸弹簧已储能b.手力储能过程如下,图3中用专用摇把驱动小锥齿轮3,小锥齿轮3再驱动与之相啮合的锥齿轮5,锥齿轮5带动直齿轮6,驱动大齿轮7按图示方向转动,以后的过程跟电机的储能一样。
由于手力储能过程不是连续进行的,所以与大齿轮相啮合的小齿轮9上装有单向轴承,用来防止储能过程中大齿轮在合闸簧拉力下反转储不上能。
CTB弹簧操动机构
CTB弹簧操动机构1、概述1.1 产品用途及使用范围、使用条件CT32 型弹簧操动机构可供匹配ZW32-12户外型高压真空断路器及合闸功与之相当的其它户外或户内真空断路器,其性能符合GB1984《交流高压断路器》和本产品《技术条件》的要求;机构合闸弹簧储能方式有电动和手动两种,合、分闸操作有电磁铁和手动按钮操作两种。
可进行重合闸操作,具有自由脱扣功能。
手动操动机构具有手动储能、手动合分、过电流保护功能。
电动操动机构具有电动机合分、过电流保护功能。
所配控制器具有涌流、延时和速断保护功能可实现过流保护。
机构储能效率高,噪音小,运行平稳;结构紧凑,合闸功大,体积小,重量轻,寿命长。
本安装使用说明书规定了弹簧操动机构的主要技术参数、产品结构、安装、使用维护的主要方法等内容。
1.2 产品型号1.3 环境条件a. 海拔高度不超过1000米b. 周围空气温度上限+40°C,下限-45°C ( 储运周围空气温度上限+40°C,下限-40°C)。
c. 相对湿度:日平均不大于95% ,月平均不大于90% ;水蒸气压平均不大于2.2×10-3 Mpa ,月平均不大于1.8×10-3 Mpa;d. 无易燃、易爆炸危险、化学腐蚀及剧烈震动的场所。
2、结构特征和工作原理2.1 弹簧操动机构总体结构及特点2 结构及动作原理2.1.1结构特点:机构采用夹板式结构。
储能电机及驱动部分、合闸凸轮及输入轴、输出轴等布置在左右侧板之间,使各部分受力合理,稳定性好。
合闸弹簧、行程开关布置在侧板外侧,便于检修和更换。
合分闸电磁铁布置在夹板外侧的上、下方,安装及拆卸方便。
主要轴两端有滚动轴承,转动灵活,传动效率高。
机构通过固定在左右侧板间的两根钢板上的安装孔,用M10螺钉安装于手车或固定柜及其短路器的基架上。
机构输出轴在机构的前方,且与安装基面平行布置。
操作简单、结构新颖、动作可靠、体积小、机械寿命可达1万次。
断路器弹簧操作机构原理
断路器弹簧操作机构原理
断路器弹簧操作机构是在断路器中使用的一种开启和关闭电路的装置,它的原理是通过弹簧的弹性能量,实现对开关的控制。
具体原理如下:
1.弹簧存储能量:断路器弹簧操作机构中的弹簧会被预先压缩,使其具有弹性能量。
2.启动机构:在需要关闭或打开断路器时,先通过启动机构切
断或连接控制电路。
3.释放弹簧能量:启动机构释放时,弹簧的弹性能量会驱动机
构的运动,进而打开或关闭断路器。
4.机械连接:弹簧操作机构与断路器的机械连接,使弹簧的运
动能够直接影响断路器的状态。
5.装置复位:当要复位断路器时,通常需要使用手动装置将压
缩的弹簧重新装入操作机构中,准备下一次操作。
断路器弹簧操作机构的原理充分利用了弹簧的弹性能量,通过合理的机械连接和启动机构来实现对断路器的操作。
这种机构具有结构简单、可靠性高、操作力小等优点,在电力系统中得到广泛应用。
弹簧操动机构与永磁操动机构的比较
弹簧操动机构与永磁操动机构的比较弹簧操动机构与永磁操动机构的比较3.1 动作原理和结构真空断路器永磁机构原理图见图1,弹簧机构见图2。
目前用于中压断路器操动机构主要有电磁式和弹簧式两种。
电磁操动机构在真空断路器发展初期得到了广泛应用,这是由于电磁操动机构较好地迎合了真空灭弧室的要求:一是开距小(8-25mm),二是在合闸位置需要大的操动力(2000-4000N/相)。
然而电磁操动机构也存在不容忽视的缺点,磁路电感L在合闸过程中变化较大,产生反电动势,从而抑制了合闸线圈电流的增大,而且这种抑制作用随着合闸速度增加而增强。
相比之下,弹簧操动机构采用于手动或小功率交流电动机储能,其分合闸速度不受电源电压波动影响,相当稳定,能够获得较高的分合闸速度,能实现快速自动重合闸操作,在一定程度上克服了电磁操动机构的缺点。
然而弹簧操动机也存在以下缺点:完全依靠机械传动,零部件数量多,一般弹簧操动机构有上百个零件,且传动机构较为复杂,故障率较高,运动部件多,制造工艺要求较高。
另外,弹簧操动机构的结构复杂,滑动摩擦面多,而且多在关键部位,在长期运行过程中,这些零件的磨损、锈蚀以及润滑剂的流失、固化等都会导致操作失误。
近年来,一种用于中压真空断路器的永磁保持、电子控制的电磁操动机构(简称永磁机构)备受关注。
和传统的断路器操动机构相比,永磁机构采用了一种全新的工作原理和结构,工作时主要运动部件只有一个,无需机械脱扣、锁扣装置,故障源少,具有较高的可靠性。
3.2 操动机构与真空断路器的配合3.2.1 力-行程特性多年来,真空断路器一直在努力追求着一种完美操动的机构:结构简单,寿命长,可靠性高,可以用小功率交流电源操作,出力特性与真空断路器的反力特性很好地匹配,能给出稍低的合闸速度和较高的分闸速度的操作机构。
真空断路器触头行程很小,合闸过程中在触头接触前只需要很小的驱动力,一旦触头闭合,就需要较大的驱动力,来压缩触头弹簧以获的足够的触头压力。
断路器弹簧机构操作功强度设计
断路器弹簧机构操作功强度计算1. 先求各运动件等效质量将全部运动件质量归化于动触头。
1.1 作直线运动的与动触头相联的零部件(如动触头、喷嘴、热膨胀室、压气缸及其支持架、气缸杆、绝缘操作杆及连接销等件),其等效质量就是其真实质量(kg),m1, m2,m3……1.2 传动拐臂(1)先求大小(内、外)拐臂真实质量ma,mb,以及转轴(或套)的真实质量mc;(2)求替代质量大拐臂替代质量集中于(替代到)A点后为mA1;(kg) (1)式中长度单位为m,下同。
小拐臂替代质量集中于B点后为mB:(kg)转轴O2替代质量集中于A点后为mA2:(kg) (2)小拐臂mB折算导A点后:(kg) (3)(3)求等效拐臂质量mA拐臂各部分的等效质量集中于A点后为mA:1.3 机构连杆及两端接头(BD件)(1)求连杆BD真实质量md1,两端若有接头,求其真实质量md2;(2)求机构输出拐臂O1D真实质量md3,再按(1)式将md3'替代到D点后得替代质量md3。
(3)杆件BD的替代质量为BD杆为平面运动件,可将md的一半集中于B点,另一半集中于D点,B、D 的替代质量为:,(kg) (4)最后,按动能相等的原则(亦按B、D点速度或转动半径比的平方),将质量mB和mD折算到A点:(kg) (5)1.4 求整个开关运动系统的等效质量Mo:Mo=m1+m2+m3++mA+mA-BD (kg) (6)考虑到计算误差和可能的设计更改,计算操作功时,取运动系统等效计算质量为M=1.1 Mo。
图1 断路器分闸操作运动系统图(K—作直线运动的灭弧室运动件)2. 机构操作功计算(1)分闸时加速动能A1:(N.m) (7)式中,M:运动系统等效质量(kg)Vf:平均分闸速度(m/s)(2)分闸时气压缸压气消耗的功A2:先假设气缸的压力特性Pt=f(l),如图2所示。
按下列原则定图2压力特性曲线:a)在喷口开放时(堵塞时间td)对应的触头行程点,气缸压力为1.7P0,时喷口打开后能建立音速气吹。