六自由度运动平台方案设计报告
并联六自由度运动平台
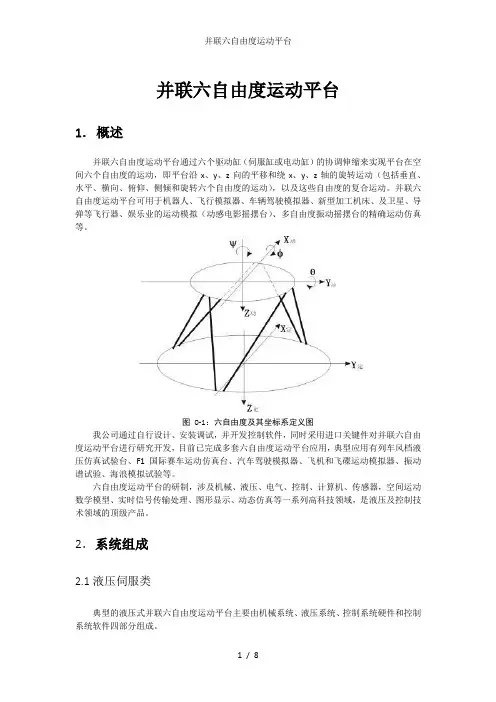
并联六自由度运动平台1.概述并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。
并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。
图0-1:六自由度及其坐标系定义图我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。
六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。
2.系统组成2.1液压伺服类典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。
液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。
控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。
控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。
2.2 电动伺服类电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增加运动控制单元。
具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。
3.主要技术参数以下参数为液压类平台典型值,具体可按用户要求设计制造。
3.1平台主要参数平台最大负载:静态≥2000KG,动态≥3000KG。
《新型六自由度运动模拟器的性能分析与设计》
《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,六自由度(6-DOF)运动模拟器在许多领域如军事训练、航天仿真、医疗康复等应用越来越广泛。
本文旨在深入分析新型六自由度运动模拟器的性能,并对其设计进行探讨。
二、六自由度运动模拟器概述六自由度运动模拟器是一种能够模拟多种运动状态的设备,它能够在三维空间内实现平动和转动等六个方向上的自由运动。
该设备主要利用计算机控制系统和执行机构进行实时控制,以达到精确模拟的效果。
三、性能分析(一)运动性能分析新型六自由度运动模拟器具有较高的运动性能,能够在短时间内实现多种复杂运动轨迹的模拟。
其运动范围广,响应速度快,可满足不同场景下的需求。
此外,该设备具有较高的动态性能和稳定性,能够在运动过程中保持较高的精度和稳定性。
(二)控制性能分析新型六自由度运动模拟器的控制性能也是其重要的性能指标之一。
该设备采用先进的计算机控制系统,能够实时接收指令并快速响应。
同时,该系统还具有较高的抗干扰能力和自适应性,能够在复杂的环境下保持稳定的控制效果。
(三)环境适应性分析新型六自由度运动模拟器具有较强的环境适应性,能够在不同的环境下进行工作。
其结构紧凑、易于安装和维护,且具有较强的抗振动和抗冲击能力,能够在恶劣的环境下保持稳定的性能。
四、设计探讨(一)结构设计新型六自由度运动模拟器的结构设计是保证其性能的关键因素之一。
设计时需考虑设备的承载能力、刚度、精度等因素,并采用先进的制造工艺和材料,以保证设备的稳定性和可靠性。
此外,还需要考虑设备的可维护性和可拆卸性,以便于设备的维护和运输。
(二)控制系统设计新型六自由度运动模拟器的控制系统是设备的核心部分,其设计直接影响到设备的性能和控制效果。
设计时需考虑控制系统的实时性、稳定性和可靠性等因素,并采用先进的控制算法和计算机技术,以保证设备的精确控制和稳定运行。
(三)软件设计软件设计是新型六自由度运动模拟器的重要组成部分,其设计需考虑用户界面、数据交互、故障诊断等功能。
《新型六自由度运动模拟器的性能分析与设计》范文
《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,模拟器技术已成为众多领域中不可或缺的辅助工具。
其中,六自由度(6DOF)运动模拟器因其能精确地模拟三维空间中的运动,而广泛应用于航空、航天、军事训练、车辆测试、游戏娱乐等多个领域。
本文将对新型六自由度运动模拟器的性能进行详细的分析,并探讨其设计过程。
二、新型六自由度运动模拟器性能分析1. 精确性:新型六自由度运动模拟器通过高精度的传感器和控制系统,能够精确地模拟各种复杂的运动状态,包括平动、转动以及各种组合运动。
其精确性远超传统模拟器,为各种应用提供了可靠的保障。
2. 稳定性:新型六自由度运动模拟器在运行过程中表现出极高的稳定性。
其独特的结构设计以及先进的控制算法,使得模拟器在各种运动状态下都能保持稳定,避免了因设备抖动或漂移导致的误差。
3. 实时性:新型六自由度运动模拟器具有极高的实时性,能够实时地反映被模拟对象的运动状态。
这使得模拟器在军事训练、车辆测试等领域中具有极高的应用价值。
4. 灵活性:新型六自由度运动模拟器具有很高的灵活性,可以方便地调整模拟的场景和运动状态,满足不同用户的需求。
同时,其模块化设计也使得设备的维护和升级变得更加简单。
三、新型六自由度运动模拟器设计1. 硬件设计:新型六自由度运动模拟器的硬件设计主要包括机械结构、传感器和控制单元等部分。
机械结构应具有足够的强度和刚度,以承受各种复杂的运动状态。
传感器应具有高精度和高可靠性,以保证模拟的准确性。
控制单元则负责接收传感器数据并输出控制信号,以实现对模拟器的精确控制。
2. 软件设计:软件设计是新型六自由度运动模拟器的关键部分。
软件应具有友好的用户界面,方便用户进行操作和设置。
同时,软件还应包括高精度的控制算法和数据处理算法,以保证模拟的精确性和实时性。
此外,软件还应具有良好的稳定性和可靠性,以保障设备的正常运行。
3. 结构设计:新型六自由度运动模拟器的结构设计应考虑到设备的整体性能和稳定性。
《新型六自由度运动模拟器的性能分析与设计》
《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,六自由度(6-DOF)运动模拟器在军事、航天、汽车制造、医疗康复等领域的应用越来越广泛。
本文旨在分析新型六自由度运动模拟器的性能,并探讨其设计思路。
二、新型六自由度运动模拟器概述新型六自由度运动模拟器是一种能够模拟三维空间中六个方向(即沿X、Y、Z轴的平移及绕X、Y、Z轴的旋转)运动的设备。
它通过高精度的传感器和控制系统,实现对被试者或设备的精确模拟运动。
三、性能分析(一)精度性能新型六自由度运动模拟器具有高精度的性能特点。
其采用了先进的传感器技术,能够实时获取模拟器的运动状态,从而实现对被试者或设备的精确控制。
此外,模拟器还具有高分辨率和低噪声的特性,确保了运动数据的准确性。
(二)稳定性性能模拟器的稳定性是评估其性能的重要指标。
新型六自由度运动模拟器采用了先进的控制算法和结构优化设计,使模拟器在运行过程中具有较高的稳定性。
同时,其采用的抗干扰能力强,能够在复杂的环境中保持稳定的运动状态。
(三)动态性能动态性能是评价模拟器在动态环境下的表现。
新型六自由度运动模拟器具有快速响应和高度灵活的特点,能够在短时间内完成复杂的运动轨迹。
此外,其还具有较高的负载能力,能够满足不同场景下的使用需求。
四、设计思路(一)硬件设计新型六自由度运动模拟器的硬件设计主要包括传感器、执行机构、控制系统等部分。
传感器用于获取模拟器的运动状态,执行机构实现模拟器的运动,控制系统则负责整个模拟器的运行。
在硬件设计过程中,需要充分考虑设备的可靠性、稳定性和可维护性。
(二)软件设计软件设计是新型六自由度运动模拟器的关键部分。
软件系统需要实现数据的采集、处理、传输和存储等功能,同时还需要对模拟器的运动进行精确控制。
在软件设计过程中,需要采用先进的控制算法和优化技术,以提高模拟器的性能和稳定性。
(三)结构设计结构设计是新型六自由度运动模拟器设计的重要组成部分。
结构设计需要考虑到设备的承载能力、刚度、阻尼等因素,以保证模拟器在运行过程中的稳定性和精度。
《2024年六自由度机械臂控制系统设计与运动学仿真》范文
《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言随着科技的飞速发展,六自由度机械臂(6-DOF robotic arm)已成为现代工业、医疗、军事等多个领域的重要工具。
其控制系统设计及运动学仿真对于提高机械臂的作业效率、精度和稳定性具有重要意义。
本文将详细介绍六自由度机械臂控制系统的设计及运动学仿真的实现过程。
二、六自由度机械臂控制系统设计1. 硬件设计六自由度机械臂控制系统硬件主要包括机械臂本体、传感器、控制器及驱动器等部分。
机械臂本体采用模块化设计,由基座、大臂、小臂、手腕等部分组成。
传感器用于检测机械臂的位置、速度、加速度等信息,为控制系统的反馈提供依据。
控制器采用高性能微处理器,实现控制算法的实时计算。
驱动器则负责将控制器的指令转化为机械臂的动力。
2. 软件设计软件设计主要包括控制系统算法设计及程序设计。
控制系统算法包括位置控制、速度控制、力控制等,采用现代控制理论,如PID控制、模糊控制等。
程序设计则采用模块化设计思想,便于后期维护和升级。
3. 控制系统架构六自由度机械臂控制系统采用分级控制架构,包括上位机、控制器和驱动器三级。
上位机负责发送任务指令及监控系统状态,控制器负责计算控制指令并输出给驱动器,驱动器则负责将控制指令转化为机械臂的动力。
三、运动学仿真运动学仿真是指通过数学模型模拟机械臂的运动过程,为控制系统的设计和优化提供依据。
本文采用MATLAB/Simulink软件进行运动学仿真。
1. 建立数学模型根据机械臂的结构参数及运动规律,建立其数学模型。
包括连杆长度、关节角度、坐标变换等参数的数学描述。
2. 创建仿真模型在MATLAB/Simulink中创建六自由度机械臂的仿真模型,包括各关节的驱动器、传感器及控制器等部分。
根据数学模型设置仿真参数,如关节角度范围、运动速度等。
3. 仿真分析进行仿真分析,观察机械臂的运动过程及性能指标,如位置精度、速度稳定性等。
根据仿真结果对控制系统进行优化和调整,提高机械臂的作业效率和稳定性。
六自由度系统集成设计(一)
并联机构的概念、特点、发展史、应用并联机构的基础知识耦合分析与各向同性设计单叶双曲面上的并联机构运动平台的概念Any system connectedto the environmentg上铰点与下铰点分别组成了两个等边三角形两三角形布置相差六个执行机构参数完全一样执行器正交布置的振下铰并非在同一这是系统集成优J.P.Merlet黄真(燕山大学)1959年毕业于哈尔滨工业大学机械方跃法:北交大研究生院副院长孔令富:燕山大学副校长学生:峰:河北工大校长、上海交大http://www-sop.inria.fr/members/Jean-Pierre.Merlet/merlet_eng.html印度理工、坎普尔引用次数:1200Stewart平台1967年1960s by Cappel for helicopter simulator1990, Oxford University Press (1920-2002)澳大利亚莫那什大学机构学教授日本航天局空间对接机构地面半物理仿真设6.1运动模拟——空间对接俄罗斯空间对接机构地面半物理仿真综合试验台对接机构综合试验台大回路攻关试验哈尔滨工业大学电液伺服仿真及试验系统研究研制加拿大The US Army's Tank-automotive and Armaments Command(TACOM)建在美国依阿华大学的目前世界上最先进的汽6.26.2并联机床DCB510混联机床Linapod 混联机床天津大学和天津第一机床厂负载5kg六自由度运动模拟器被试验对接机构对接机构标准件 支撑框架温场软罩对接力、力矩测量运动平台主被动对接机构间相互作用影像监视 高低温环境六 维力传 感器控制系统。
六自由度汽车驾驶运动模拟器设计
摘要汽车驾驶模拟器是一种用于汽车产品开发、“人—车—环境”交通特性研究或驾驶培训的重要工具。
近年来,由于具有安全性高、再现性好、可开发性强、成本低等显著特点,研究开发驾驶模拟器已经成为国内外一个重要发展方向。
本文在查阅国内外大量资料的基础上,结合老师的研究课题主要对六自由度汽车驾驶模拟器液压系统部分进行设计。
六自由度汽车运动模拟器采用液压伺服阀控制液压缸来驱动模拟平台的运动,以实现汽车驾驶模拟器运动姿态模拟。
本文主要进行机械机构的设计、液压伺服系统设计、液压泵站设计和液压缸的设计等。
通过模拟器的机构设计和驱动液压伺服系统设计,结合电气系统能够实现汽车在不同运行状态的模拟,当驾驶员坐在驾驶舱系统的座椅上进行模拟驾驶时,完全能够感受到实际汽车驾驶的各种体感,为实车训练驾驶提供了可替代的模拟平台;本设计也为今后的进一步研究及其在娱乐模拟器、动感电影等产业的实际推广和应用方面奠定了基础。
关键词:汽车驾驶模拟器六自由度运动平台液压伺服系统运动姿态控制AbstractThe Automobile-driving i an important tool which used for the development of auto mobile product and the study of the transportation characteristics of “man-car-environment”or the driver training .In recent years, the study of the automobile-driving simulator used for development has become an important development direction in the world because of the notable characteristics of high safety, well reappearance of scene, easy to develop and low cost.This article is based on searching the large quantity of information about at home and abroad, and combines with the tea cher’s research task which mainly designs the part of 6-dof driving Simulator of hydraulic system .The 6-dof motion simulator adopts valves of hydraulic servo to control actuator to drive the movement of driving simulation platform, and to achieve the movement posture simulation of the automobile driving simulator. This article is mainly about the designing of machine, the system of hydraulic servo, hydraulic pump station, and actuator and so on.According to the designing of agencies of simulator and hydraulic servo system, it can combines the electrical system which can bring out the imitation of cars in different movement conditions, when the driver simulating drive on the seat of cockpit system, you can feel the feeling of driving a true car, and it also offer the simulator platform which can be replaced for true driving training. At the same time, this designing is also establishes for the further researches and the practice extension and use.Keywords:Driving-automobile simulator, 6-dof of motion platform, the system of hydraulic servo, the control of campaign attitude目录1绪论 (1)1.1 引言 (1)1.2 国内外发展现状 (2)1.2.1 国内外研究和发展概述 (2)1.2.2 驾驶模拟器的应用和发展 (3)1.3 课题任务 (5)1.4 论文的主要研究内容 (5)2 运动学及力学分析 (6)2.1 六自由度运动模拟器机构位置反解 (6)2.1.1 坐标系的建立 (6)2.1.2 广义坐标定义 (6)2.1.3 坐标变换矩阵 (7)2.1.4 液压缸铰支点坐标的确定 (8)2.1.5 位置反解 (10)2.2 六自由度运动模拟器机构位置正解 (11)2.3 静力学分析 (11)3 机械及液压部分设计 (12)3.1 运动模拟平台的设计 (12)3.1.1 液压缸内壁D活塞杆直径d的计算 (12)3.1.2 液压缸壁厚和外径的计算 (14)3.1.3 缸盖壁厚的确定 (14)3.1.3 液压缸工作行程的确定 (15)3.1.4缸体长度的确定 (15)3.1.5液压系统的计算 (15)3.2 液压泵站 (17)3.3 铰链的设计 (18)3.4 执行机构单元组成 (21)3.5 电液伺服控制单元与液压系统 (22)3.6 反馈单元 (23)4 电气部分设计 (24)4.1电气原理及接口设计 (24)4.1.1 MCS-51系列单片机的引脚及其功能 (24)4.1.2 单个电液伺服液压缸位置控制电路设计 (26)4.1.3扩展电路 (26)4.2 电气原理图 (27)5 结论 (28)5.1 本文结论 (28)5.2 本文研究工作的不足 (28)参考文献 (29)致谢 (30)1绪论1.1 引言驾驶模拟器是一种用于汽车产品开发、“人-车-环境”交通特性研究或驾驶培训的重要工具。
《2024年六自由度机械臂控制系统设计与运动学仿真》范文
《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言六自由度机械臂,以其出色的灵活性和高精度的运动控制能力,在工业自动化、医疗、军事等领域有着广泛的应用。
本文旨在设计一个六自由度机械臂控制系统,并对其运动学进行仿真分析。
首先,我们将对系统进行总体设计,然后详细介绍控制系统的硬件设计、软件设计以及运动学仿真分析。
二、系统总体设计六自由度机械臂系统主要由机械结构、驱动系统、控制系统和传感器系统四部分组成。
其中,控制系统是整个系统的核心,负责协调各部分的工作,实现机械臂的精确运动。
三、硬件设计1. 控制器选择:选用高性能的工业控制计算机作为主控制器,具有强大的计算能力和良好的稳定性。
2. 驱动系统:采用伺服电机驱动,通过控制器对伺服电机的控制,实现机械臂的精确运动。
3. 传感器系统:包括位置传感器、力传感器等,用于获取机械臂的实时状态信息。
四、软件设计1. 操作系统:采用实时操作系统,保证系统的高效性和实时性。
2. 控制算法:采用基于PID控制的运动控制算法,实现对机械臂的精确控制。
同时,采用路径规划算法,实现机械臂的自主运动。
3. 人机交互界面:设计友好的人机交互界面,方便操作人员对机械臂进行控制。
五、运动学仿真分析1. 建立机械臂运动学模型:根据机械臂的几何参数和关节参数,建立其运动学模型。
2. 仿真环境搭建:在仿真软件中搭建机械臂的虚拟环境,包括工作空间、障碍物等。
3. 仿真实验:在仿真环境中进行机械臂的运动学仿真实验,验证控制系统的性能和机械臂的运动学特性。
通过仿真实验,我们可以得到以下结论:1. 控制系统性能良好,能够实现对机械臂的精确控制。
2. 机械臂的运动学特性符合预期,具有较高的灵活性和运动精度。
3. 人机交互界面友好,操作简便,方便操作人员对机械臂进行控制。
六、结论本文设计了一种六自由度机械臂控制系统,并通过运动学仿真分析了其性能和特点。
实验结果表明,该控制系统具有良好的性能和较高的运动精度,能够满足工业自动化、医疗、军事等领域的需求。
六自由度汽车驾驶运动模拟器设计
摘要汽车驾驶模拟器是一种用于汽车产品开发、“人—车—环境”交通特性研究或驾驶培训的重要工具。
近年来,由于具有安全性高、再现性好、可开发性强、成本低等显著特点,研究开发驾驶模拟器已经成为国内外一个重要发展方向。
本文在查阅国内外大量资料的基础上,结合老师的研究课题主要对六自由度汽车驾驶模拟器液压系统部分进行设计。
六自由度汽车运动模拟器采用液压伺服阀控制液压缸来驱动模拟平台的运动,以实现汽车驾驶模拟器运动姿态模拟。
本文主要进行机械机构的设计、液压伺服系统设计、液压泵站设计和液压缸的设计等。
通过模拟器的机构设计和驱动液压伺服系统设计,结合电气系统能够实现汽车在不同运行状态的模拟,当驾驶员坐在驾驶舱系统的座椅上进行模拟驾驶时,完全能够感受到实际汽车驾驶的各种体感,为实车训练驾驶提供了可替代的模拟平台;本设计也为今后的进一步研究及其在娱乐模拟器、动感电影等产业的实际推广和应用方面奠定了基础。
关键词:汽车驾驶模拟器六自由度运动平台液压伺服系统运动姿态控制AbstractThe Automobile-driving i an important tool which used for the development of auto mobile product and the study of the transportation characteristics of “man-car-environment”or the driver training .In recent years, the study of the automobile-driving simulator used for development has become an important development direction in the world because of the notable characteristics of high safety, well reappearance of scene, easy to develop and low cost.This article is based on searching the large quantity of information about at home and abroad, and combines with the tea cher’s research task which mainly designs the part of 6-dof driving Simulator of hydraulic system .The 6-dof motion simulator adopts valves of hydraulic servo to control actuator to drive the movement of driving simulation platform, and to achieve the movement posture simulation of the automobile driving simulator. This article is mainly about the designing of machine, the system of hydraulic servo, hydraulic pump station, and actuator and so on.According to the designing of agencies of simulator and hydraulic servo system, it can combines the electrical system which can bring out the imitation of cars in different movement conditions, when the driver simulating drive on the seat of cockpit system, you can feel the feeling of driving a true car, and it also offer the simulator platform which can be replaced for true driving training. At the same time, this designing is also establishes for the further researches and the practice extension and use.Keywords:Driving-automobile simulator, 6-dof of motion platform, the system of hydraulic servo, the control of campaign attitude目录1绪论 (1)引言 (1)国内外发展现状 (2)1.2.1国内外研究和发展概述 (2)1.2.2驾驶模拟器的应用和发展 (3)课题任务 (5)论文的主要研究内容 (5)2 运动学及力学分析 (6)六自由度运动模拟器机构位置反解 (6)2.1.1坐标系的建立 (6)2.1.2广义坐标定义 (6)2.1.3坐标变换矩阵 (7)2.1.4液压缸铰支点坐标的确定 (8)2.1.5位置反解 (10)六自由度运动模拟器机构位置正解 (11)静力学分析 (11)3 机械及液压部分设计 (12)运动模拟平台的设计 (12)3.1.1液压缸内壁D活塞杆直径d的计算 (12)3.1.2液压缸壁厚和外径的计算 (14)3.1.3缸盖壁厚的确定 (14)3.1.3液压缸工作行程的确定 (15)3.1.4缸体长度的确定 (15)3.1.5液压系统的计算 (15)液压泵站 (17)铰链的设计 (18)执行机构单元组成 (21)电液伺服控制单元与液压系统 (22)反馈单元 (23)4 电气部分设计 (24)电气原理及接口设计 (24)4.1.1MCS-51系列单片机的引脚及其功能 (24)4.1.2单个电液伺服液压缸位置控制电路设计 (26)4.1.3扩展电路 (26)电气原理图 (27)5 结论 (28)本文结论 (28)本文研究工作的不足 (28)参考文献 (29)致谢 (30)1绪论引言驾驶模拟器是一种用于汽车产品开发、“人-车-环境”交通特性研究或驾驶培训的重要工具。
六自由度设计报告
六自由度设计报告引言:六自由度是指物体在空间中具有的六个独立的运动自由度,包括三个平动自由度和三个转动自由度。
在机械设计领域中,六自由度设计是一种常见的设计方法,可以实现物体在空间中的多样化运动。
本文将探讨六自由度设计的基本概念、应用领域以及设计原则,并分析几个典型的案例。
一、六自由度设计的基本概念六自由度设计是指通过合理布置和设计机械装置,使其具有平移和旋转等六个自由度的能力。
其中,平动自由度包括物体在三个坐标轴上的平移能力,而转动自由度则包括物体绕三个坐标轴的旋转能力。
通过控制这些自由度,我们可以使机械装置在空间中实现各种复杂的运动。
二、六自由度设计的应用领域六自由度设计在许多领域都有广泛的应用。
在机器人领域,六自由度机械臂能够模拟人类手臂的运动,广泛应用于装配、焊接、搬运等工作。
在航空航天领域,六自由度设计可以使飞机、卫星等飞行器在空中实现各种姿态的调整和稳定。
在医疗领域,六自由度机器人可以用于手术操作,提高手术的精确性和安全性。
三、六自由度设计的原则六自由度设计需要考虑以下几个原则:1. 功能需求:根据具体的应用需求确定机械装置需要实现的运动自由度和精度。
2. 结构设计:通过合理的结构设计,使机械装置能够灵活地实现各种运动。
可以采用齿轮传动、连杆机构等方式来实现运动的传递和转换。
3. 控制系统:设计合理的控制系统,实现对六个自由度的精确控制和调节。
可以采用传感器和电机等装置来实现控制。
4. 安全性考虑:在设计过程中考虑到机械装置的安全性,避免出现意外事故。
案例分析:1. 机器人装配线:六自由度机器人装配线能够根据产品的不同要求,实现各种复杂的装配动作,提高生产效率和质量。
2. 飞行器姿态控制:六自由度设计可以使飞行器在空中实现各种姿态的调整,提高飞行的稳定性和灵活性。
3. 医疗机器人手术系统:六自由度机器人手术系统可以实现对患者进行精确的手术操作,减少手术风险和创伤。
结论:六自由度设计是一种重要的机械设计方法,具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
2020年4月19日
六自由度运动平台
方案设计报告
编 号
密 级 内部
阶段标记
C
会签
校对
审核
批准
六自由度运动平台
方案设计
名 称
内容摘要:
针对YYPT项目在原理样机出现的问题,对YYPT原理样机从结构设
计、伺服系统等方面进行优化设计,以满足设计及使用要求。
主
题
词
YYPT 优 化
更
改
栏
更改单号 更改日期 更改人 更改办法
1 概述
YYPT原理样机用原库房留存的345厂的直流电机作为动力源,
直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软
件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速
度、精度、运动规律上等几个技术指标无法满足原规定的指标要
求,现在此基础上进行优化方案的设计。
2 原理样机技术状态
2.1 原理样机方案
2.1.1 组成
原理样机采用工控机作为系统的控制单元,工控机内配有研华
PCI1716和 PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公
司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流
可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,
电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采
用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。具体产品
组成表见表2.1。
序号 产品名称 型号 厂家 数量 备注
1 电动缸 KH08XX(3) 西安方元明 6
安装345厂电机
2 电阻尺 LTS-V1-375 上海徳测 6
3 驱动器 50A8 AMC 6
3 A/D卡 PCI1716 研华 1
文档仅供参考,不当之处,请联系改正。
5
2020年4月19日
4 D/A卡 PCI1723 研华 1
5 工控机 610H 研华 1
6 直流电源 1
2.1.2 结构方案
六自由度运动平台是由六条电动缸经过虎克铰链和球笼万向节
联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六
条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,Y,
Z,α,β,γ)的运动,从而能够模拟出各种空间运动姿态。
图1 六自由度平台外形图
a)球笼联轴器(如图2所示)
采用球笼铰链与上平面连接。球笼铰链结构简单、体积小、运
球笼联轴器
电动缸
虎克铰链
上动平台
下静平台