传感器动态性能分析与动态补偿
传感器复习题
变介质型电容传感器的特点是利用不同介质的介电常数各不相同,通过改变介质的介 电常数实现对被测量的检测,并通过电容式传感器的电容量的变化反映出来。适合于介质的 介电常数发生改变的场合。
7、电容式传感器有哪些优点和缺点? 优点:(1)温度稳定性好(2)结构简单(3)动态响应好(4)可以实现非接触测量,
n 的数值由所要求的精度来定。若 n=3,则式中:a0, a1, a2, a3 为待定常数。
3)求解待定常数 a0 , a1 , a2 ,a3
二、将所求得的常系数 a0~a3 存入内存
将已知的反非线性特性拟合方程式写成下列形式:
y=a0+a1x+a2x2+a3x3
16、设计一个低通滤波器, 使它的频域响应特性与下列模拟滤波器相同:即要求所设计的 数字滤波器(GD(z))在ωD=a=10 rad/s 处的幅值为-3 dB。设已知采样周期 T=0.2 s
21、以压阻式压力传感器为例,其输出不仅受到工作环境温度 T 的影响,而且还受到电源 供电电流的影响,为了消除这两个参量的影响,需要对 T 和 I 分别进行监测。 1)试建立三传感器数据融合智能传感器械系统框图; 2)给出在进行三维标定试验时的三元回归方程。
式中,P 为规定的被测参量压力;为压阻式压力传感器输入压力为 P 时的输出电压值;为检 测工作环境温度用温度传感器的输出;为检测供电电流用传感器的输出;为可忽略的高阶(大 于二阶)无穷小量。
22、试述曲面拟合法基本原理。用二元回归分析的方法,以压阻式压力为例说明数据融合 的方法。 曲面拟合法,就是根据实际试验测试数据,求取函数 f(x,y)与变量 x 及 y 之间的解析式,使 其通过或近似通过所有的实验测试点。也就是说,使所有实验数据点能近似地分布在函数
传感器

广义传感器:指能感知某一物理量、化学量或生物量等信息,并能将之转化为可加以利用的信息的装置。
狭义传感器:指能感知规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。
传感器结构图:传感器的特性:对传感器的输出量与输入量之间对应关系的描述。
静态特性:输入量恒定或缓慢变化时的传感器的特性。
动态特性:输入量变化较快时的传感器的特性。
性能指标:灵敏度、线性度、迟滞、重复性和漂移等。
灵敏度:输出量增量△y 与相应的输入量增量△x 之比。
灵敏度越大表示传感器越灵敏。
线性度:传感器的输出与输入之间数量关系的线性程度。
拟合直线:用一条直线近似地代表实际曲线的一段,使传感器输入输出特性线性化,所采用的直线称为拟合直线。
线性度定义:在全量程范围内实际特性曲线与拟合直线之间的最大偏差值ΔL max 与满量程输出值Y FS 之比。
线性度也称为非线性误差,用γL 表示。
线性度与拟合直线的选取有关;通常用最小二乘法求取拟合曲线。
迟滞:输入量正行程及输入量反行程变化期间其输入输出特性曲线不重合的现象 迟滞差值:同一大小的输入信号正反行程输出的信号的差值。
迟滞误差:传感器在全量程范围内最大的迟滞差值ΔH max 与满量程输出值Y FS 之比称为迟滞误差,又称回差或变差,用γH 表示。
重复性:传感器在输入量按同一方向作全量程连续多次变化时,所得特性曲线不一致的程度。
漂移:在输入量不变的情况下,传感器输出量随着时间变化的现象。
产生原因:传感器自身结构参数;周围环境温度漂移:动态特性:输入量变化较快时的传感器的特性;动态误差:实际输出与理想输出之间的差异;(实际输出不仅是输入的函数也是时间的函数) 一阶系统(惯性系统):x y S ∆∆=%100max ⨯∆±=FS L Y L γ%100FSmax H ⨯∆=Y H γ20FS Y t y y t ξ-=∆)()()(t kx t y dtt dy =+τ)()()(001t x b t y a dt t dy a =+时间常数τ具有时间的量纲,反映传感器的惯性的大小。
压力传感器温度漂移补偿的应用分析

素。
是 温 度 漂 移 的 补 偿 ,在 实 际应 用 当 中 ,压 阻 式 压 力 传 感 器 的 确 面 临 着 温 度 补 偿 问题 。压 阻式 压 力 传 感 器 会 受 到 温 度 的 影
我 们将 这 类 方 法 称之 为 “ 内补 偿 法 ” 。 桥
压 阻 式 传 感 器 在 硅 芯 片 上 扩 散 出 的 四 个桥 臂 电阻 ,一 般
压 传 器其 大 力 感 及 放
部 A转 /换 分 D
盖 某及 萎
是 将 其 连 接 成 惠 斯 通 电桥 。为 使 电桥 的灵 敏 度 最 大 ,将 一 对 阻 值 增 加 的 电阻 对 接 ,将 另 一 对 阻值 减小 的 电阻 也 对 接 ,如 图 3所 示 。在 图 3所示 的 串 并联 电阻补 偿 法 原 理 图 中 ,其 原 理 在 于 通 过 串并 联 于 桥 臂 上 的 电 阻 来 调 节 电桥 的零 点 输 出 , 并 使 其 零 点 输 出 随温 度 变 化 而 产 生 的 漂 移 控 制 在 尽 可 能 小 的 范 围 内 。其 中 ,串联 电阻 Rs主 要 起 调 零 作 用 ,并 联 电 阻 Rp
话 ,那么软件补偿 比较适合 ,因为软件 补偿 有精确度高 ,成
图 3 惠 斯 通 电桥 补 偿 原 理 图
2 软 件 零 点 补偿 方 法 .
() 3 压力分辨率高 , 它可以检测 出像血压 那么小 的微压 。
( )频 率 响 应 好 ,它 可 以 测 量 几 十 千 赫 的脉 动压 力 。 4 () 5 由于 传 感 器 的力 敏 元 件 及 检 测 元 件 制 在 同一 块 硅 片 上 , 所 以它 工作 可 靠 ,综 合 精 度 高 ,且 使 用 寿 命 长 。 ( )由于 采 用 半 导 体 材 料 硅 制 作 , 感 器 对 温 度 比 较 敏 6 传
风电场动态无功补偿装置性能分析与比较

风电场动态无功补偿装置性能分析与比较牛若涛(北京京能新能源有限公司内蒙古分公司,内蒙古呼和浩特 010070) 摘 要:近年来,随着风力发电接入电网规模的逐步扩大,风电场无功补偿装置的补偿能力和响应时间等参数越来越受到各方重视。
同时,随着电力电子技术的快速发展,应用于风电无功补偿装置的新材料新工艺也不断涌现。
文章简要介绍风电场无功补偿装置的发展历史,重点介绍目前常用的各种风电场无功补偿装置的工作原理和系统组成,对各种补偿装置的运行特性、主要参数进行了详细的分析与比较。
关键词:静止型动态无功补偿;SVC;T CR;SVG 中图分类号:T M7 文献标识码:A 文章编号:1006—7981(2012)23—0095—03 2011年是我国陆上风电产业继续发展的一年,仅内蒙古地区就增加吊装容量3736.4M W,累计容量17594.4M W。
随着区域性风电场开发容量的逐渐扩大,风电机组并网对系统造成的影响越来越明显。
国内目前的风电场大多采用感应式异步发电机,并入电网运行时需要吸收系统的无功功率。
在风电场集电线路母线安装无功补偿设备则可以提供异步发电机所需的无功功率,降低电网因输送无功功率造成的电能损耗,改善电网的运行条件。
本文结合目前风电场广泛使用的不同类型无功补偿装置的运行维护经验,从无功补偿装置的原理、系统组成及功能特性等方面进行了对比分析,得出了风电场最优的无功补偿配置方案。
1 无功补偿装置发展风力发电机组多数是异步发电机组,输出有功功率的同时,需要从电网吸收一定的无功功率,容易引起并网点的电压波动,通常采用在风电场集电线路母线上安装静止型无功补偿装置SVC(Static V ar Compensator)的方式进行治理。
SVC的发展历程大体可分为如下三个阶段:第一阶段:早期的并联电容器组静态补偿装置,用电容器补偿容性无功。
后来的磁阀式可控电抗器(M CR),采用直流助磁原理,利用附加直流励磁磁化铁心(自耦电抗器),改变铁心磁导率,实现电抗值的阶段性连续调整。
微机械加速度计误差分析与补偿技术

03
微机械加速度计误差来源
标度因数误差
总结词
标度因数误差是指微机械加速度计在测量加速度时,实际输出值与理论输出值 之间的偏差。
详细描述
标度因数误差主要由制造过程中的不准确性和装配误差引起,如敏感元件的尺 寸、形状和质量的偏差,以及结构参数的不准确性。此外,标度因数误差还可 能受到温度、压力和湿度等环境因素的影响。
在恒定的加速度输入下,加速度计的输出存在一定的偏差,表现为零点偏移和灵敏度误差。
动态测试结果
在动态变化加速度输入下,加速度计的输出存在跟随误差和幅值误差。
结果分析
零点偏移误差分析
由于制造工艺和结构的不完善,加速度计在无加速度输入 时会产生零点偏移误差。可通过温度补偿、时间漂移补偿 等措施减小误差。
国内
随着微机械加速度计研究的深入,国内学者也开始关注其误差分析和补偿技术。虽然起步较晚,但在国家政策支持和 企业需求的推动下,国内的研究进展迅速,取得了一定的研究成果。
存在的问题
尽管国内外学者在微机械加速度计误差分析和补偿方面取得了一定的成果,但仍存在一些问题。例如, 误差模型的建立不够精确,补偿算法的鲁棒性有待提高等。因此,仍需进一步深入研究微机械加速度计 误差分析和补偿技术。
跟随误差分析
跟随误差是由于加速度计对加速度输入的响应速度较慢而 产生的误差。可通过优化电路参数、采用数字滤波器等措 施减小误差。
灵敏度误差分析
由于传感器内部参数变化、温度变化等因素影响,加速度 计的灵敏度会发生变化,导致测量误差。可通过标定、温 度补偿等措施减小误差。
幅值误差分析
传感器实验报告
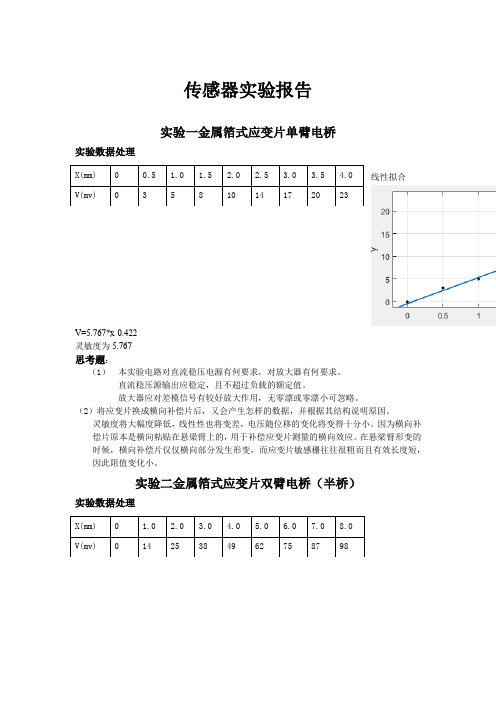
传感器实验报告实验一金属箔式应变片单臂电桥实验数据处理线性拟合V=5.767*x-0.422 灵敏度为5.767思考题:(1) 本实验电路对直流稳压电源有何要求,对放大器有何要求。
直流稳压源输出应稳定,且不超过负载的额定值。
放大器应对差模信号有较好放大作用,无零漂或零漂小可忽略。
(2)将应变片换成横向补偿片后,又会产生怎样的数据,并根据其结构说明原因。
灵敏度将大幅度降低,线性性也将变差,电压随位移的变化将变得十分小。
因为横向补偿片原本是横向粘贴在悬梁臂上的,用于补偿应变片测量的横向效应。
在悬梁臂形变的时候,横向补偿片仅仅横向部分发生形变,而应变片敏感栅往往很粗而且有效长度短,因此阻值变化小。
实验二金属箔式应变片双臂电桥(半桥)实验数据处理V=11.95*x+0.778灵敏度为11.95思考题:(1)根据应变片受力情况变化,对实验结果作出解释。
在梁上下表面受力方向相反的应变片相当于将形变放大两倍,,因此,ΔV/ΔX大约是实验一中的两倍。
(2)将受力方向相反的两片应变片换成同方向应变片后,情况又会怎样。
同方向的两片应变片相互抵消,输出为零。
(3)比较单臂,半桥两种接法的灵敏度。
在相同形变量下,半桥的灵敏度约是单臂的两倍。
实验三金属箔式应变片四臂电桥(全桥)的静态位移性能V=24.15*x+1.4灵敏度问24.15思考题:(1)如果不考虑应变片的受力方向,结果又会怎样。
对臂应变片的受力方向应接成相同,邻臂应变片的受力方向相反,否则相互抵消没有输出(2)比较单臂,半桥,全桥各种接法的灵敏度。
在相同形变量下,半桥灵敏度约是单臂的两倍,全桥灵敏度越是半桥的两倍,即约为全桥的四倍。
实验四金属箔式应变片四臂电桥(全桥)振动时的幅频性能实验数据处理思考题:(1)在实验过程中,观察示波器读出频率与频率表示值是否一致,据此,根据应变片的幅频特性可作何应用。
不一致。
可以根据这个原理反向测出梁的震动频率,利用应变片读出峰值,在找到对应的频率值即可。
压力传感器零点温漂的两种补偿方法比较
压力传感器零点温漂的两种补偿方法比较吴峰【摘要】压阻式压力传感器在实际应用中普遍存在零位偏离和零位温度漂移现象,这就降低了传感器的测量精度,因此需采取适当的补偿方法对这两种现象产生的误差进行修正,从而提高测量精度。
文中分别通过电桥臂一串一并的硬件补偿方法及基于规范化多项式拟合算法的软件补偿方法同时实现平衡零位与补偿零位漂移。
由模型推导分析及实验最终得出,通过规范化多项式计算方法拟合出的数据精度较高,补偿效果好于一串一并的硬件补偿方法。
%Zero drift and zero temperaturedrift generally exist in practical application of piezoresistive pressure sen-sors,which leads to loss of measuring accuracy ofsensors.Therefore,appropriate compensation method needs to be adopt-ed for error correction,thus improving measuring accuracy.The paper provides two methods to achieve null balance and compensate zero drift simultaneously,the hardware method of bridge arm in series and parallel and the software method based on normalized polynomial fitting algorithm.According to model analysis and deduction as well as experiments,statis-tics obtained through normalized polynomial fitting algorithm shows higher accuracy and better compensation effect than the hardware compensation method of bridge arm in series and parallel.【期刊名称】《通信电源技术》【年(卷),期】2014(000)003【总页数】3页(P45-47)【关键词】压力传感器;温漂补偿;多项式拟合【作者】吴峰【作者单位】中煤科工集团上海研究院,上海 201400【正文语种】中文【中图分类】TP212压阻式压力传感器以其灵敏度高、动态响应好、性能可靠、精度高、功耗低、易于微型化与集成化等优点被广泛应用于工业生产的各个领域,其误差也直接影响到测控设备的性能。
传感器简答

1、什么是传感器的静态特性?它有哪些性能指标? 如何用公式表征这些性能指标?2、什么是传感器的动态特性? 其分析方法有哪几种?3、什么是传感器的静特性?主要指标有哪些?有何实际意义?4、什么是传感器的基本特性?传感器的基本特性主要包括哪两大类?解释其定义并分别列出描述这两大特性的主要指标。
(要求每种特性至少列出2种常用指标)1、 答:传感器的静态特性是它在稳态信号作用下的输入-输出关系。
静态特性所描述的传感器的输入、输出关系式中不含有时间变量。
传感器的静态特性的性能指标主要有: ① 线性度:非线性误差maxL FSL 100%Y γ∆=±⨯ ② 灵敏度:yn xd S=d③ 迟滞:max HFSH 100%Y γ∆=⨯ ④ 重复性:maxRFSR 100%Y γ∆=±⨯⑤ 漂移:传感器在输入量不变的情况下,输出量随时间变化的现象。
2、答:传感器的动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性。
传感器的动态特性可以从时域和频域两个方面分别采用瞬态响应法和频率响应法来分析。
知识点:传感器的动态特性 3、答:传感器的静态特性是当其输入量为常数或变化极慢时,传感器的输入输出特性,其主要指标有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。
传感器的静特性由静特性曲线反映出来,静特性曲线由实际测绘中获得。
通常人们根据传感器的静特性来选择合适的传感器。
知识点:传感器的静态特性 4、答:传感器的基本特性是指传感器的输入-输出关系特性。
传感器的基本特性主要包括静态特性和动态特性。
其中,静态特性是指传感器在稳态信号作用下的输入-输出关系,描述指标有:线性度(非线性误差)、灵敏度、迟滞、重复性和漂移;动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性,主要描述指标有:时间常数、延迟时间、上升时间、峰值时间、响应时间、超调量、幅频特性和相频特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传感器动态性能分析与动态补偿
来源:/app/control/201112/102783.htm
传感器的静态特性
传感器的静态特性是指对静态的输入信号,传感器的输出量与输入量之间所具有相互关系。
因为这时输入量和输出量都和时间无关,所以它们之间的关系,即传感器的静态特性可用一个不含时间变量的代数方程,或以输入量作横坐标,把与其对应的输出量作纵坐标而画出的特性曲线来描述。
表征传感器静态特性的主要参数有:线性度、灵敏度、分辨力和迟滞等。
传感器的动态特性
所谓动态特性,是指传感器在输入变化时,它的输出的特性。
在实际工作中,传感器的动态特性常用它对某些标准输入信号的响应来表示。
这是因为传感器对标准输入信号的响应容易用实验方法求得,并且它对标准输入信号的响应与它对任意输入信号的响应之间存在一定的关系,往往知道了前者就能推定后者。
最常用的标准输入信号有阶跃信号和正弦信号两种,所以传感器的动态特性也常用阶跃响应和频率响应来表示。
dB(Decibel,分贝) 是一个纯计数单位,本意是表示两个量的比值大小,没有单位
对于功率,dB = 10*lg(A/B)。
对于电压或电流,dB = 20*lg(A/B)。
-3=10*lg(x)
x=0.5 (8-20Hz)
刹那是指一个心念起动的极短时间即为一“念”,20念为一瞬,20瞬为一弹指,20弹指为一罗预,20罗预为一须臾,30须臾为一昼夜,如此算来,一刹那就是0.018秒。
摘要:在对炮口冲击波测试中,压力传感器的动态性能指标是否满足测量要求至关重要。
本文通过GLS(SF)方法建立压力传感器的数学模型,并由数学模型求出动态性能指标。
然而该传感器的动态性能指标不能满足测量要求,针对此问题本文采用零极点相消的方法设计出动态补偿滤波器,明显提高了该传感器的动态性能,最终解决了该冲击波的测量问题。
1 引言
在炮口冲击波测试系统中,需要对冲击波高压信号进行动态测量。
由于炮口冲击波是一种高速压力波,信号的频带很宽(有效带宽约为70KHZ),信号上升一般在数ua内,且持续时间短,所以要求压力传感器的工作频带宽、响应时间快。
可以说传感器的动态特性将直接影响测试系统功能的发挥。
首先需要对该传感器动态特性进行研究,如果其工作频带不能涵盖被测量信号的有效带宽,输出信号与被测信号之间存在畸变,测量结果就不可信。
这时就需要进行动态补偿以减小动态误差。
为了获取传感器的动态特性,必须从它的动态模型人手,通过动态校准实验数据,用系统辨识的方法获得传感器的动态数学模型,并由此求出动态性能指标。
如果动态性能指标不能满足测量要求,就应该设计动态补偿滤波器,改善传感器的动态性能,提高整个测试系统的可靠性和准确性。
2 传感器建模方法、步骤及其结果
对于压力传感器建模,从系统辨识理论可知,为了辨识系统,必须对系统加人足够“丰富”的激励信号(充分覆盖被校传感器的模态),激励出传感器的主要模态Δ全面获取传感器的有用信息,据此建立相应的输人输出关系。
基于预测的滤波算法
1、采集10个数据。
2、当采集到第11个数据时,通过前面10个数据进行曲线拟合如果数据时在动态范围内,此数据有效。
否则数据通过,拟合后,此数据和采集的数据进行加权处理。
如果超过动态值,此数据为假数据。
3、是正常扰动造成的数据如何处理:信号为阶跃信号则持续增大或持续减小,如果为周期性信号,则此数据又是。
假设:系统为一阶对象或是二阶对象。
4、是干扰信号:频率超过某个频率,某个频率50H,冲击干扰。
5、10个数据可以分析数据的频谱。
传感器的静态特性
此特性通过硬件系统保证。
传感器的选取,器件的选取(特别是温度特性),电源系统设计。
传感器的动态特性
此特通过软件系统保证。
干扰信号和正常信号的区分:
干扰信号分成随机信号、周期信号干扰和冲击干扰。
正常信号的形式,一般为给定值。
随机信号干扰可采取平均滤波的方法。
冲击干扰,变化率大的太多则为,冲击干扰,例如:某传感器动态响应速度8到20mS,-3DB。
那么数据
LP = 20lg(P/P0)
-3=20lg(P/P0)
-0.15=lg(P/P0)
P/P0=0.707
则再20ms内,此次值不可能大于,上次的0.707。
否则此次值取0.707这个值。
时域动态校准实验数据处理方法
本文提出一套时域动态校准的实验数据处理方法。
它可以根据时域动态校准的实验数据,求出被校传感器(或系统)的参数模型(差分方程,离散传递函数与连续传递函数),非参数模型(频率特性和阶跃响应等)与动态性能指标,同时还有检查模型回归效果的功能,可将模型计算的瞬态响应与动态校准的实验数据画在同一坐标纸上,数学模型质量的优劣便一目了然。
无论时域或频域建立参数模型时,都采用了一定方式排除测量噪声干扰。
所以,由参数模型计算的频率特性,比直接由实验数据用FFT算法算出的更符合线性模型的性质。
由参数模型计算的阶跃响应与频率特性上计算时域与频域的动态性能指标才比较合理。
文中给出一个传感器与放大器的动态校准的实验数据处理结果。
传感器基本特性
1、传感器静态特性
2、传感器线性度、重复性、迟滞、零位误差
3、静态特性数据处理技术
4、传感器动态特性
5、时域内动态数据处理
6、频域内动态处理技术
7、传感器的冲击响应、阶跃响应以及频率响应的特征。