实验 力矩式自整角机实验(实际做个实验)
实验一力矩式自整角机实验一.实验目的
1.了解力矩式自整角机精度和特性的测定方法。
2.掌握力矩式自整角机系统的工作原理和应用知识。
二.预习要点
1.力矩式自整角机的工作原理。
2.力矩式自整角机精度与特性的测试方法。
3.力矩式自整角机比整步转矩的测量方法。
三.实验项目
1.测定力矩式自整角发送机的零位误差。
2.测定力矩式自整角机静态整步转矩与失调角的关系曲线。
3.测定力矩式自整角机比整步转矩(又称比力矩)及阻尼时间。
4.测定力矩式自整角机的静态误差。
四.实验设备及仪器
1.NMEL系列电机系统教学实验台主控制屏(NMEL-II)
2.自整角机实验仪
五.实验方法
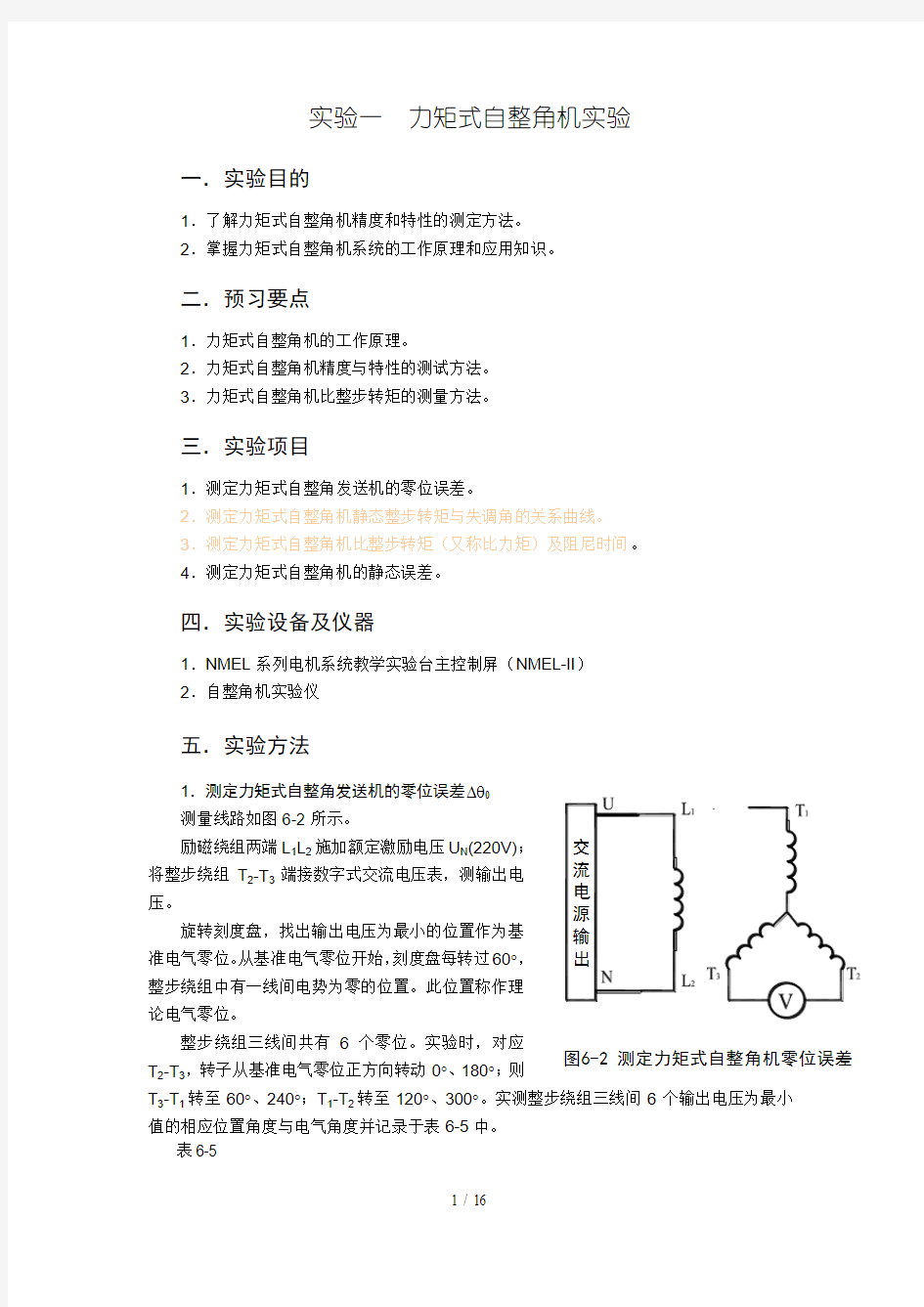
测量线路如图6-2
励磁绕组两端L1L2
将整步绕组T2-T3
压。
准电气零位。
论电气零位。
整步绕组三线间共有
T2-T3,
T3-T1转至60?、240?;T
表6-5
注意:机械角度超前为正误差,滞后为负误差,取其正、负最大误差绝对值之和的一半,
表中:T=G×R
式中 G──砝码重量,单位为(g ) R──园盘半径=2cm 3.力矩式自整角机比整步转矩T θ的测定
在力矩式自整角系统中,接收机与发送机在协调位置附近,单位失调角所产生的整步转矩称为力矩式自整角机比整步转矩,以T θ表示,单位为g·cm/deg 。
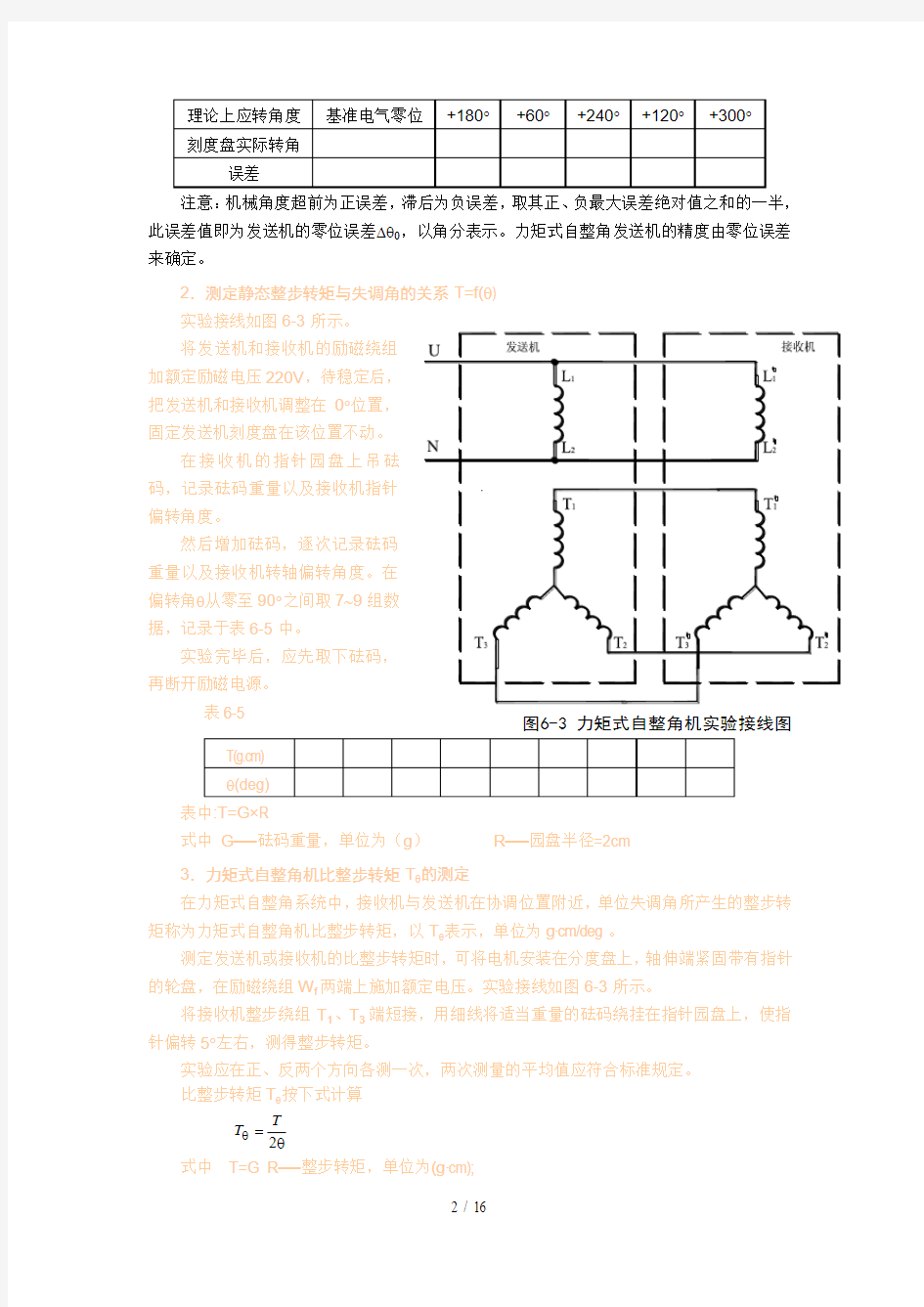
测定发送机或接收机的比整步转矩时,可将电机安装在分度盘上,轴伸端紧固带有指针的轮盘,在励磁绕组W f 两端上施加额定电压。实验接线如图6-3所示。
将接收机整步绕组T 1、T 3端短接,用细线将适当重量的砝码绕挂在指针园盘上,使指针偏转5?左右,测得整步转矩。
实验应在正、反两个方向各测一次,两次测量的平均值应符合标准规定。 比整步转矩T θ按下式计算 T T θθ
=
2 式中 T=G R──整步转矩,单位为(g·cm);
θ──指针偏转的角度,单位为deg;
G──砝码重量,单位为g;
R──轮盘半径,单位为cm。
4.测定力矩式自整角机的静态误差?θjt
在力矩式自整角机系统中,静态协调时,接收机与发送机转子转角之差即静态误差?θjt,以角度表示。
实验接线仍如图6-3所示。将发送机和接收机的励磁绕组加额定励磁电压220V,待稳定后,把发送机和接收机调整在0?位置,缓慢旋转发送机刻度盘,每转过20?,测取接收机实际转过的角度并记录于表6-6中。
六.实验报告
1.根据实验结果,求出被试力矩式自整角发送机的零位误差?θ0。2.作出静态整步转矩与失调角的关系曲线T=f(θ)。
3.根据实验结果计算出该力矩式自整角机的比整步转矩Tθ的数值。4.此次实验所用接收机的阻尼时间t n的实测数值是多少?
5.根据实验结果,求出被试力矩式自整角接收机的静态误差?θjt。
实验二控制式自整角机参数的测定
一.实验目的
1.通过实验测定控制式自整角机的主要技术参数。
2.掌握控制式自整角机的工作原理和运行特性。
二.预习要点
1.控制式自整角机的工作原理和运行特性。
2.控制式自整角机的主要技术指标。
三.实验项目
1.测自整角变压器输出电压与失调角的关系U2=f(θ)。
2.测定比电压uθ。
3.测定零位电压u0。
四.实验设备及仪器
1.NMEL系列电机系统教学实验台主控制屏(NMEL-II)
2.自整角机实验仪
五.实验方法
1.测定控制式自整角变压器输出电压与失调角的关系U2=f(θ)
接线如图6-5所示。
在自整角发送机的L1、L2绕组两端施加额定电压U N。
旋转发送机刻度盘至00位置并固定不动。
用手缓慢旋转自整角变压器的指针园盘,接在L1′、L2′两端的数字电压表就会有相应读数,找到输出电压为最小值的位置,即为起始零点。
然后,旋转自整角变压器的指针园盘,每转过10?测量一次自整角变压器输出电压U2。测取各点U2及θ值并记录于表6-7中。
2.测定比电压Uθ
比电压是指自整角变压器在失调角为10时的输出电压,单位为V/deg。
六.实验报告
1.作自整角变压器的输出电压与失调角的关系曲线U2=f(θ) 2.该自整角变压器的比电压为多少?
3.被测试自整角变压器的零位电压数值为多少?
实验三 直流伺服电机实验
一.实验目的
1.通过实验测出直流伺服电动机的参数r a 、e κ、T κ 2.掌握起流伺服电动机的机械特性和调节特性的测量方法 3.测直流伺服电动机的机电时间常数,求传递函数
二.预习要点
1.对直流伺服电动机有什么技术要求 2.直流伺服电动机有几种控制方式 3.直流伺服电动机的机械特性和调节特性
三.实验项目
1.用伏安法测出直流伺服电动机的电枢绕组电阻r a
2.保持U f =U fN =220V ,分别测取U a =220V 及U a =110V 的机械特性n=f(T) 3.保持U f =U fN =220V ,分别测取T 2=0.8N.m 及T 2=0的调节特性n=f(Ua) 4.测直流伺服电动机的机电时间常数
四.实验设备及仪器
1.MEL 系列电机系统教学实验台主控制屏(NMEL-II ) 2.电机导轨及测功机、转速转矩测量(NMEL-13) 3.直流并励电动机M03(作直流伺服电机)
4.直流电机仪表、电源(NMEL-18)(位于实验台主控制屏的下部) 5.三相可调电阻900Ω(NMEL-03) 6.三相可调电阻78
1接线原理图见图6-11U R :1800ΩV :直流电压表(A :直流安培表(M :直流电机电枢
(1)经检查接线无误后,逆时针调节磁场调节电阻R 使至最大。直流电压表量程选为300V 档,直流安培表量程选为2A 档。
(2)按顺序按下主控制屏绿色“闭合”按钮开关,可调直流稳压电源的船形开关以及复位开关,建立直流电源,并调节直流电源至220V 输出。
调节R 使电枢电流达到0.2A (如果电流太大,可能由于剩磁的作用使电机旋转,测量无法进行,如果此时电流太小,可能由于接触电阻产生较大的误差),迅速测取电机电枢两端电压U M 和电流I a 。将电机转子分别旋转三分之一和三分之二周,同样测取U M 、I a ,填入表6-21。
取三次测量的平均值作为实际冷态电阻值Ra=
3
13
2a a a R R R ++。
表中R a =(R a1+R a2+R a3)/3
(3)计算基准工作温度时的电枢电阻
由实验测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温。按下式换算到基准工作温度时的电枢绕组电阻值:
R aref =R a a
ref θθ++235235
式中R aref ——换算到基准工作温度时电枢绕组电阻。(Ω)
R a ——电枢绕组的实际冷态电阻。(Ω) θref ——基准工作温度,对于E 级绝缘为75℃。 θa ——实际冷态时电枢绕组的温度。(℃) 2.测直流伺服电动机的机械特性 实验线路如图6-12所示。
R 1:180Ω电阻(NMEL-04中两只90Ω相串联) R f :900Ω电阻(NMEL-03中两只900Ω相串联) R 2:采用NMEL-03最上端900Ω电阻,为电位器接法 开关S 选用NMEL-05 M :直流伺服电动机M03: G :涡流测功机
I S :电流源,位于NMEL-13,由“转矩设定”电位器进行调节。实验开始时,将MEL-13“转速控制”和“转矩控制”选择开关板向“转矩控制”,“转矩设定”电位器逆时针旋到底。
V 1:可调直流稳压电源自带电压表
V 2:直流电压表,量程为300V 档,位于NMEL-06
c.再接通直流稳压电源,电机运转后把R1调到最小值,调节电枢绕组两端的U a=U N =220V并保持不变。
d.调节测功机负载,使电机输出转矩增加,并调节R f,使n=1600r/min,I a=I aN,此时电机励磁电流为额定电流。
保持此额定电流不变,调节测功机负载,记录空载到额定负载的T、n、I a,并填入表6-22中。
a N
的T、n、I a,并填入表6-23中
3.测直流伺服电动机的调节特性
按上述方法起动电机,电机运转后,调节电动机轴上的输出转矩T=0.8N.m,保持该转矩及I f=I fN不变,调节直流稳压电源(或R1阻值)使U a从U N值逐渐减小,记录电机的n、U a、I a并填入表6-24中。
使电动机和测功机脱开,仍保持I f=I fN,在电机空载状态,调节直流稳压电源(或R1阻值),使U a从U N逐渐减小,记录电动机的n、U a、I a并填入表6-25中。
表6-25 U
3*.测直流伺服电动机的机电时间常数
先接通励磁电源,调节R f,使I f=I fN,再接通直流稳压电源,并调节输出电压,使电机
τ和机械时间能启动运转,利用数字示波器拍摄直流伺服电动机空载起动时的电时间常数
e τ,从而求出传递函数。
常数
m
4.测空载始动电压
操作前先把R1置最小值,R f置最小值,R2顺时针调到底,使U R2R3的电压为零,并且开关S闭合。断开测功机的励磁电流。
启动电机前先接通励磁电源,调节U f=220V,再接通电枢电源,调节R2使输出电压缓慢上升,直到转轴开始连续转动,这时的电压为空载始动电压U a。
正反二个方向各做三次,取其平均值作为该电机始动电压,将数据记录于表6—26。
六.实验报告
1.根据实验记录,计算75℃时电枢绕组电阻r a75℃数值;Ke、Kt等参数。
2.根据实验测得的数据,作出电枢控制时电机的机械特性n=f(t)和调节特性n=f(Ua)曲线。并求出电机空载时的始动电压。
3.分析实验数值及现象。
实验四步进电动机实验
一.实验目的
1.加深了解步进电动机的驱动电源和电机的工作情况。
2.步进电动机基本特性的测定。
二.预习要点
1.了解步进电动机的驱动电源和工作情况
2.步进电动机有基本特性?怎样测定?
三.实验项目
1.单步运行状态
2.角位移和脉冲数的关系
3.空载实跳频率的测定
4.空载最高连续工作频率的测定
5.转子振荡状态的观察
6.定子绕组中电流和频率的关系
7.平均转速和脉冲频率的关系
8.矩频特性的测定及最大静力矩特性的测定
四.实验设备及仪器
1.教学实验台主控制屏
2.电机导轨及测功机(NMEL-13、NMEL-14)
3.步机电机驱动电源(NMEL-10)
4.步进电机M10
5.双踪示波器
6.直流电流表(NMCL-001)
五.实验方法及步骤
1.驱动波形观察
a.合上控制电源船形开关,分别按下“连续”控制开关和“正转/反转”、“三拍/六拍”,“启动/停止”开关,使电机处于三拍正转连续运行状态。
b.用示波器观察电脉冲信号输出波形(CP波形),改变“调频”电位器旋钮,频率变化范围应不小于5H Z~1KH Z,可从频率计上读出此频率。
c.用示波器观察环形分配器输出的三相A、B、C波形之间的相序及其与CP脉冲波形
d.改变电机运行方式,使电机处于正转、六拍运行状态,重复C的实验。(注意,每次改变电机运行,均需先弹出“启动/停止”开关,再按下“复位”按钮,再重新起动。)e.再次改变电机运行方式,使电机处于反转状态,重复C的实验。
2.步进电机特性的测定和动态观察。
按图6-1接线,注意接线不可接错,测功机和步进电机脱开,且接线时需断开控制电源。
a.单步运行状态
接通电源,按下述步骤操作:按下“单步”琴键开关,“复位”按钮,“清零”按钮,最后按下“单步”按钮。
每按一次“单步”按钮,步进电机将走一步距角,绕组相应的发光管发亮,不断按下“单步”按钮,电机转子也不断作步进运行,改变电机转向,电机作反向步进运动。
b.角位移和脉冲数的关系
按下“置数”琴键开关,给拔码开关预置步数,分别按下“复位”、“清零”按钮(操作以上步骤须让电机处于停止状态),记录电机所处位置。
按下“启动/停止”开关,电机运转,观察并记录电机偏转角度,填入表6-1。
再重新预置步数,重复观察并记录电机偏转角度,填入表6-1,并利用公式计算电机偏转角度与实际值是否一致。
进行上述实验时,若电机处于失步状态,则数据无法读出,须调节“调频”电位器,寻找合适的电机运转速度,使电机处于正常工作状态。
c.空载突跳频率的测定
电机处于连续运行状态,按下“启动/停止”开关,调节“调频”电位器旋钮使频率逐渐提高。
弹出“启动/停止”开关,电机停转,再重新起动电机,观察电机能否运行正常,如正常,则继续提高频率,直至电机不失步启动的最高频率,则该频率为步进电机的空载突跳频率,记为H Z。
d.空载最高连续工作频率的测定。
步进电机空载连续运转后,缓慢调节“调频”电位器旋钮,使电机转速升高,仔细观察电机是否不失步,如不失步,则继续缓慢提高频率,直至电机停转,则该频率为步进电机最高连续工作频率,记为为H Z。
e.转子振荡状态的观察。
步进电机脉冲频率从最低开始逐步上升,观察电机的运行情况,有无出现电机声音异常或电机转子来回偏转,即出现步进电机的振荡状态。
f.定子绕组中电流和频率的关系。
电机在空载状态下连续运行,用示波器观察取样电阻R波形,即为控制绕组电流波形,改变频率,观察波形的变化。
在停机条件下,将测功机和步进电机同轴联接,起动步进电机,并调节MEL-13的“转矩设定”电位器,观察定子绕组电流波形。
g.平均转速和脉冲频率的关系
电机处于连续运行状态,改变“调频”旋钮,测量频率f(由频率计读出)与对应的转速n,则n=f(f),填入表6-2中。
h.矩频特性的测定。
电机处于连续空载运行状态,缓慢顺时针调节“转矩设定”旋钮,对电机逐渐增大负载,
直至电机失步,读出此时的转矩值。
改变频率,重复上述过程得到一组与频率f对应的转矩T值,即为步进电机的矩频特性T=f(f),记录于表6-3中。
i.静力矩特性T=f(I)
断开电源,将直流安培表(5A量程档)串入控制绕组回路中,将“单步”控制琴键开关和“三拍/六拍”开关按下,用起子将测功机堵住。
合上船形开关,按下“复位”按钮,使C相绕组通电,缓慢转动步进电机手柄,观察MEL-13转矩显示的变化,直至测功机发出“咔嚓”一声,转矩显示开始变小,记录变小前的力矩,即为对应电流I的最大静力矩T max的值。
改变“电流调节”旋钮,重复上述过程,可得一组电流I值及对应I值的最大静力矩T max 值,即为T max=f(I)静力矩特性。可取4-5组记录于表6-4中。
表6-4
实验时,为提高精确度,同一电流下,可重复3次取其转矩的平均值,每次转动步进电机手柄前,应先前测功机堵转起子拿出,待测功机回零后,再重新将起子插入测功机堵转孔中。
六.实验报告
对上述实验内容进行总结,并加以分析
1.步进电机处于三拍、六拍不同状态时,驱动波形的关系。
2.单步运行状态:步距角=
3.角位移和脉冲数关系:
4.空载突跳频率:
5.空载最高连续工作频率:
6.平均转速和脉冲频率的特性n=f(f)
7.矩频特性T=f(f)
8.最大静力矩特性T max=f(I)
七.思考题
1.影响步进电机步距的因素有哪些?采用何种方法步距最小?
2.平均转速和脉冲频率的关系怎样?为什么特别强调是平均转速?
3.最大静力矩特性是怎样的特性?
4.如何对步进电机的矩频特性进行改善?
八.注意事项。
步进电机驱动系统中控制信号部分电源和功放部分电源是不同的,绝不能将电机绕组接至控制信号部分的端子上,或将控制信号部分端子和电机绕组部分端子以任何形式连接。
转矩流变仪实验
实验一转矩流变仪实验 1. 实验重点和难点 1.1 了解转矩流变仪的基本结构及其适应范围; 1.2 熟悉转矩流变仪的工作原理及其使用方法; 1.3 掌握聚氯乙烯(PVC)热稳定性的测试方法。 2. 实验原理 物料被加到混炼室中,受到两个转子所施加的作用力,使物料在转子与室壁间进行混炼剪切,物料对转子凸棱施加反作用力,这个力由测力传感器测量,在经过机械分级的杠杆和 ?)读数。其转矩值的大小反应了物料黏度的大小。臂转换成转矩值的单位牛顿?米(N m 通过热电偶对转子温度的控制,可以得到不同温度下物料的黏度。 转矩数据与材料的粘度直接有关,但它不是绝对数据。绝对粘度只有在稳定的剪切速率下才能测得,在加工状态下材料是非牛顿流体,流动是非常复杂的湍流,有径向的流动也有轴向的流动,因此不可能将扭矩数据与绝对粘度对应起来。但这种相对数据能提供聚合物材料的有关加工性能的重要信息,这种信息是绝对法的流变仪得不到的。因此,实际上相对和绝对法的流变仪是互相协同的。从转矩流变仪可以得到在设定温度和转速(平均剪切速率)下扭矩随时间变化的曲线,这种曲线常称为“扭矩谱”,除此之外,还可同时得到温度曲线、压力曲线等信息。在不同温度和不同转速下进行测定,可以了解加工性能与温度、剪切速度的关系。转矩流变仪在共混物性能研究方面应用最为广泛。转矩流变仪可以用来研究热塑性材料的热稳定性、剪切稳定性、流动和固化行为。 图1为一般物料的转矩流变曲线,但有些样品没有AB段。 各段意义分别如下。 OA:在给定温度和转速下,物料开始粘连,转矩上升到A点。 AB:受转矩旋转作用,物料很快被压实(赶气),转矩下降到B点(有的样品没有AB 段)。 BC:物料在热和剪切力的作用下开始塑化(软化或熔融),物料即由粘连转向塑化,转矩上升C点。 CD:物料在混合器中塑化,逐渐均匀。达到平衡,转矩下降到D。 DE:维持恒定转矩,物料平衡阶段(至少在90s以上)。 E以后:继续延长塑化时间,导致物料发生分解、交联、固化,使转矩上升或下降。
低压电器及其控制设计实验指导书
低压电器及其控制设计实验指导书
目录 D Z SZ-1型电机及电气技术实验装置受试电机铭牌数据一览表......... II D Z SZ-1型电机及自动控制实验装置简介 (1) 三相异步电动机点动和自锁控制线路设计及 三相异步电动机的正反转控制线路设计 (4)
D Z SZ-1型电机及电气技术实验装置受试电机铭牌数据一览表
DZSZ-1型电机及自动控制实验装置简介 《电力拖动自动控制系统》、《电机控制》是电器工程及自动化、自动化等专业重要的专业课。DZSZ-1型电机及自动控制实验装置采用组件挂箱式结构,可根据不同实验内容进行组合,结构紧凑、使用方便、功能齐全、综合性能好,可满足《电机控制》、《直流调速系统》、《交流调速系统》等课程的实验教学。 一.系统配置的组件 1.DZ01 电源控制屏 2.DZ02实验桌 3.DZ03电机导轨、测速发电机及转速表 4.DZ04直流电压、电流表 5.DD05测功支架、测功盘及弹簧秤 6.DJ11三相组式变压器 7.DJ13直流复励发电机 8.DJ14直流串励电动机 9.DJ15直流并励电动机 10.DJ16三相鼠笼式异步电动机 11.DJ17三相绕线式异步电动机 12.DJ17-1绕线式异步电机起动与调速电阻箱 13.DJ20单相电容运转异步电动机 14.DJ21单相电阻起动异步电动机 15.DJ23校正过的直流测功机 16.DJ24三相鼠笼式异步电动机 17.D31直流数字电压、毫安、安培表(三只) 18.D32交流电流表(三只) 19.D33交流电压表(三只) 20.D34-3单、三相智能功率及功率因数表 21.D41三相可调电阻器(90欧×2,1.3A) 22.D42三相可调电阻器(900欧×2,0.41A) 23.D43三相可调电抗器 24.D45-1测功专用电阻、电容器 25.D51波形测试及开关板
转矩流变仪及其在塑料加工中地应用
返回 转矩流变仪及其在塑料加工中的应用 洪王暄迎思海亭 理工大学 1. 转矩流变仪的组成与特点 转矩流变仪是在Brabender塑化仪的基础上发展起来的一种综合性聚合物材料流变性能测试实验设备。其突出特点是可以在接近于真实加工条件下,对材料的流变行为进行研究。目前已经在塑料加工性能研究、配方设计,材料真实流变参数测量等方面获得了重要应用。随着转矩流变仪应用的日益广泛,其组成和性能也在不断发展,呈现多功能、高性能、高精度、自动化等趋势。 转矩流变仪主要由测控主机和功能单元两大部分组成。测控主机提供了转矩流变仪的基本工作环境,完成各种数据采集与记录,以及为各功能单元提供动力和控制。功能单元是实现各种测量的功能部分,目前已广泛应用的有,双转子混炼器、单螺杆挤出机、平行双螺杆挤出机、锥型双螺杆挤出机、杂质测量仪、口模膨胀测量仪、各种挤出加工模具等。各功能单元以积木形式与测控主机相连,并在相应软件的支持下,实现具体的实验、测量和分析功能。下面详细描述各部分的结构和性能。 1.1 测控主机组成与性能 测控主机主要由计算机、数据测控系统、动力系统及转矩测量系统构成。其组成框图如图1.1所示: 图1.1 测控主机原理图 其中计算机通过运行相应软件,完成各种操作和数据处理。在计算机上运行的软件有两类,一类是测控软件,它提供了一个人机交互的接口,操作者可以在其提供的虚拟仪器界面上完成绝大多数的仪器操作,另外该软件还完成测量数据的显示和保存任务。另一类是数据处理软件,它与各功能单元配合完成各种测量和分析。测控主机和测控软件界面如图1.2和1.3所示。
图1.2 测控主机 图1.3 测控软件界面 数据测控系统是以单片微型计算机为核心的电子系统,完成温度、压力、转速、转矩等数据的采集以及实现电气、温度及转速控制。 动力系统为功能单元提供工作动力,由电动机和减速机组成。转矩测量系统可以测量动力系统的输出转矩,并以此数据描述物料与各功能单元作用时的粘度变化,并进一步表征熔体的流变性。 测控主机为各功能单元提供了电气及机械接口,与各功能单元连接后,能够完成各种实验功能。测控主机的基本性能如下: 动力输出功率:3kW 转矩测量精度:0.1%F·S 转速输出围:2~150rpm(10~800rpm) 压力测量精度:0.5%F·S 转矩测量围:0~200N·m 转速控制精度:0.3%F·S 压力测量围:0.1~100MPa 温度控制精度:±1℃ 温度控制回路:4路(可扩展) 电加热输出功率:2.2kW/路 1.2 动力及转矩测量 由于转矩流变仪可以通过动力系统的输出转矩表征塑合物熔体的流变性,因此动力系统以及输出转矩的测量是转矩流变仪的关键技术之一。动力系统除了要满足规定的转速和转矩输出外,还需要满足转矩测量系统的要求。转矩测量有两种方式,一是利用专用的转矩传感器测量,二是利用力矩平衡法测量。第一种方式是将转矩传感器串联在动力系统与功能单元之间,由转矩传感器直接输出转矩信号。这种测量方式的优点是对动力系统要求较低,采用一般的直流或交流电机就能满足要求,缺点是测量精度受转矩传感器限制,一般不超过0.5%F·S,另外转矩传感器是转动部件,需要维护。第二种方法原理是,当系统转子旋转并输出一定转矩时,系统定子必定受到大小相等方向相反的反作用力矩,该力矩可通过测力传感器测量得到。这种测量方法的优点是能够获得较高的测量精度,可达0.1%F·S,并且测量系统无可动部件,免维护、可靠性高。缺点是需要高稳定的伺服动力系统,两种转矩测量方法以及相应动力系统综合性能的比较如表1.1所示: 表1.1 动力及转矩测量系统性能对比
自整角机的工作原理
自整角机的工作原理 1 控制式自整角机的工作原理 控制式自整角机的工作原理可以由左图来说明。图中由结构、参数均相同的两台自整角机构成自整角机组。一台用来发送转角信号,它的励磁绕组接到单相交流电源上,称为自整角发送机,用ZKF表示。另一台用来接收转角信号并将转角信号转换成励磁绕组中的感应电动势输出,称之为自整角接收机,用ZKJ表示。两台自整角机定子中的整步绕组均接成星形,三对相序相同的相绕组分别接成回路。 图7-31 控制式自整角机工作原理图 在自整角发送机的励磁绕组中通入单相交流电流时,两台自整角机的气隙中都将产生脉振磁场,其大小随时间按余弦规律变化。脉振磁场使自整角发送机整步绕组的各相绕组生成时间上同相位的感应电动势,电动势的大小取决于整步绕组中各相绕组的轴线与励磁绕组轴线之间的相对位置。当整步绕组中的某一相绕组轴线与励磁绕组轴线重合时,该相绕组中的感应电动势为最大值,用EFm表示电动势的最大值。 设发送机整步绕组中的A相绕组轴线与其对应的励磁绕组轴线的夹角为θJ,接收机整步绕组中的A相绕组轴线与其对应的励磁绕组轴线的夹角为θF ,如图上图所示。发送机整步绕组中各相绕组的感应电动势有效值为 可以证明:接收机励磁绕组的合成电动势,即输出电动势E0为 式中E0m ——最大输出电动势有效值
从上式看出,失调角=0 时,接收机的输出电动势为最大而不是零, 且与失调角有余弦关系的输出电动势不能反映发送机转子的偏转方向,故很不实用。实际的控制式自整角机是将接收机转子绕组轴线与发送机转子绕组轴线 垂直时的位置作为计算的起始位置。此时,输出电动势表示为 由于接收机转子不能转动,即是恒定的。控制式自整角机的输出电动势的大小反映了发送机转子的偏转角度,输出电动势的极性反映了发送机转子的偏转方向,从而实现了将转角转换成电信号。 2力矩式自整角机的工作原理 力矩式自整角机的工作原理可以由左图来说明。图中由结构、参数均相同的两台自整角机构成自整角机组,一台用来发送转角信号,称自整角发送机,用ZLF 表示;另一台用来接收转角信号,称为自整角接收机,用ZLJ表示。两台自整角机中的整步绕组均接成星形,三对相序相同的相绕组分别连接成回路。两台自整角机转子中的励磁绕组接在同一个单相交流电源上。 图7-35 力矩式自整角机接线图及磁动势图 在励磁绕组中通入单相交流电流时,两台自整角机的气隙中都将生成脉振磁场,其大小随时间按余弦规律变化。脉振磁场使整步绕组的各相绕组生成时间上同相位的感应电动势,电动势的大小取决于整步绕组中各相绕组的轴线与励磁绕组轴线之间的相对位置。当整步绕组中的某一相绕组轴线与其对应的励磁绕组轴线重合时,该相绕组中的感应电动势为最大,用Em表示电动势的最大值。 设发送机整步绕组中的A相绕组轴线与其对应的励磁绕组轴线的夹角为 F ,
电机设备THDSZ-1使用说明讲解
DDSZ-1型电机及电气技术实验装置 一、概述 “DDSZ-1型电机及电气技术实验装置”是由本企业设计的新颖综合性的实验装置,它针对目前我国高等院校“电机学”、“电机与拖动”、“微特电机”、“电机控制”、“继电接触控制”、“可编程控制器技术”及“工厂电气控制”等课程实验大纲的要求,能开设上述课程的相关实验。本实验装置特别适用于高等院校现有的电机、电气技术实验设备的更新改造,为中等专业学校、职业技术学院等新建或扩建实验室,迅速开设实验课提供了理想的实验设备,同时也为教师或研究生开发新的实验或进行科学研究提供了良好的硬件条件。 二、特点 1.综合性强本装置综合了目前国内各类院校电机及电气类课程的全部实验项目。 2.适应性强能满足各类学校相应课程的实验教学,实验的深度与广度可根据需要作灵活调整,普及与提高可根据教学的进程作有机地结合。装置采用组件式结构,更换便捷,如需要扩展功能或开发新实验,只需添加部件即可,永不淘汰。 3.整套性强从仪器仪表、专用电源、电机及其它实验部件到实验连接专用导线等均配套齐全,配套部件的性能、规格等均密切结合实验的需要进行配置。 4.直观性强各实验挂件采用分隔结构形式,组件面板示意、图线分明,各挂件任务明确,操作、维护方便。 5.科学性强装置占地面积少,节约实验用房,减少基建投资;配套的小电机均经特殊设计,可模拟中小型电机的特性和参数;小电机耗电少,节约能源;实验噪声小,整齐美观,改善实验环境;电气控制实验,内容丰富,设计合理,除了巩固与加深理论知识外,还为学生走向社会打下良好的基础;测量仪表采用指针式(带超量程告警等)、数模双显、数字式、智能化及人机对话等相结合,密切结合教学实验需要进行配置,使装置测量手段现代化;设有定时器兼报警记录仪,为学生实验技能的考核提供一个统一的标准。 6.开放性强控制屏供电隔离(浮地设计),并设有内、外电压型漏电保护装置和电流型漏电保护装置,确保操作者的安全;各电源输出均有监示及短路保护等功能,使用方便;各测量仪表均有保护功能,整套装置经过精心设计,加上可靠的元器件质量及精致的工艺,产品性能优良,所有这些均为开放性实验创造了条件,有利于提高学生分析和解决问题的能力。 三、技术性能 1.输入电源:三相四线~380V±10% 50Hz 2.工作环境:温度-10℃~+40℃相对湿度<85%(25℃) 海拔<4000m 3.装置容量:<1.5kVA 4.重量: 480kg 5.外形尺寸:187cm×73cm×160cm 四、实验项目 1.直流电机实验 (1)认识实验 (2)直流发电机 (3)直流并励电动机 (4)直流串励电动机 (5)并励电动机转动惯量测试 2.变压器实验 (1)单相变压器 (2)三相变压器(3)三相变压器的联接组和不对称短路 (4)三相三绕组变压器
DDSZ1实验指导书
Tianhuang Teaching Apparatuses 天煌教仪 电机系列实验 DDSZ-1型 电机及电气技术实验装置Motor And Electric Technique Experimental Equipment 实验指导书 天煌教仪 浙江天煌科技实业有限公司
DDSZ-1型电机及电气技术实验装置受试电机铭牌数据一览表
DDSZ-1型电机及电气技术实验装置交流及直流电源操作说明 实验中开启及关闭电源都在控制屏上操作。开启三相交流电源的步骤为: 1)开启电源前。要检查控制屏下面“直流电机电源”的“电枢电源”开关(右下角)及“励磁电源”开关(左下角)都须在“关”断的位置。控制屏左侧端面上安装的调压器旋钮必须在零位,即必须将它向逆时针方向旋转到底。 2)检查无误后开启“电源总开关”,“关”按钮指示灯亮,表示实验装置的进线接到电源,但还不能输出电压。此时在电源输出端进行实验电路接线操作是安全的。 3)按下“开”按钮,“开”按钮指示灯亮,表示三相交流调压电源输出插孔U、V、W及N上已接电。实验电路所需的不同大小的交流电压,都可适当旋转调压器旋钮用导线从这三相四线制插孔中取得。输出线电压为0-450V(可调)并可由控制屏上方的三只交流电压表指示。当电压表下面左边的“指示切换”开关拨向“三相电网电压”时,它指示三相电网进线的线电压;当“指示切换”开关拨向“三相调压电压”时,它指示三相四线制插孔U、V、W和N输出端的线电压。 4)实验中如果需要改接线路,必须按下“关”按钮以切断交流电源,保证实验操作安全。实验完毕,还需关断“电源总开关”,并将控制屏左侧端面上安装的调压器旋钮调回到零位。将“直流电机电源”的“电枢电源”开关及“励磁电源”开关拨回到“关”断位置。 开启直流电机电源的操作: 1)直流电源是由交流电源变换而来,开启“直流电机电源”,必须先完成开启交流电源,即开启“电源总开关”并按下“开”按钮。 2)在此之后,接通“励磁电源”开关,可获得约为220V、0.5A不可调的直流电压输出。接通“电枢电源”开关,可获得40~230V、3A可调节的直流电压输出。励磁电源电压及电枢电源电压都可由控制屏下方的1只直流电压表指示。当将该电压表下方的“指示切换”开关拨向“电枢电压”时,指示电枢电源电压,当将它拨向“励磁电压”时,指示励磁电源电压。但在电路上“励磁电源”与“电枢电源”,“直流电机电源”与“交流三相调压电源”都是经过三相多绕组变压器隔离的,可独立使用。 3)“电枢电源”是采用脉宽调制型开关式稳压电源,输入端接有滤波用的大电容,为了不使过大的充电电流损坏电源电路,采用了限流延时的保护电路。所以本电源在开机时,从电枢电源开合闸到直流电压输出约有3~4秒钟的延时,这是正常的。 4)电枢电源设有过压和过流指示告警保护电路。当输出电压出现过压时,会自动切断输出,并告警指示。此时需要恢复电压,必须先将“电压调节”旋钮逆时针旋转调低电压到正常值(约240V以下),再按“过压复位”按钮,即能输出电压。当负载电流过大(即负载电阻过
控制式自整角机
控制式自整角机 一、实验目的 1、通过实验测定控制式自整角机的主要技术参数 2、掌握控制式自整角机的工作原理和运行特性 二、预习要点 1、控制式自整角机的工作原理和运行特性 2、控制式自整角机的主要技术指标 三、实验项目 1、测自整角变压器输出电压与失调角的关系U2=f(θ) 2、测定比电压Uθ和零位电压U0 四、实验方法 1、测定控制式自整角变压器输出电压与失调角的关系U2=f(θ) (1)按图7-8接线。发送机加额定电压,旋转发送机刻度盘至0o位置并固紧。 (2)用手缓慢旋转自整角变压器的指针圆盘,接在L1′、L2′两端的数字电压表就有相应读数,找到输出电压为最小值的位置,即为起始零点。 (3)然后,用手缓慢旋转自整角变压器的指针圆盘,在指针每转过10 o时测量一次自整角变压器的输出电压U2。测取各点U2及θ值并记录于表7-16中。 2、测定比电压Uθ 比电压是指自整角变压器在失调角为1o时的输出电压,单位为v/deg。 在刚才测定控制式自整角变压器输出电压与失调角关系的实验时,用手缓慢旋转自整角变压器的指针圆盘,使指针转过起始零点5 o,在这位置记录自整角变压器的输出电压U2值,计算失调角为1 o时的输出电压。
图7-8 控制式自整角机实验接线图 3、测定零位电压U 0 1)按图7-9接线。调压器输出电压为最小位置,绕组T 2′、T 3′两端点短接。 2)合上交流电源,缓慢调节调压器使输出电压为49V ,并保持不变。 3)用手缓慢旋转指针圆盘,找出控制式自整角机输出电压为最小的位置,即为基准电气零位。指针转过180 o ,仍找出零位电压位置。 4)同样方法,改接绕组(使T 1′、T 3′短接,T 1′、T 2′短接),找出零位电压位置,测量六个位置的零位电压值并记录于表7-17中。 图7-9 测定控制式自整角机零位电压接线图 V L '2L ' 1
自整角机实验
力矩式自整角机实验 自整角机是一种对角位移或角速度的偏差有自整步能力的控制电机,他广泛用于显示装置和随动系统中,使机械上互不相连的两根或多根转轴能自动保持相同的转角变化或同步旋转,在系统中通常是两台或多台自整角机组合使用。产生信号的一方称发送机,接收信号的一方称为接收机。 使用说明 1、自整角机技术参数 发送机型号BD-404A-2 接收机型号BS-404A 激磁电压220V±5% 激磁电流0.2A 次级电压49V 频率50H Z 2、发送机的刻度盘及接收机的指针调准在特定位置的方法 旋松电机轴头螺母,拧紧电机后轴头,旋转刻度盘(或手拨指针圆盘)至某要求的刻度值位置,保持该电机转轴位置并旋紧轴头螺母。 3、接线柱的使用方法 本装置将自整角机的五个输出端分别与接线柱对应相连,激磁绕组用L1、L2(L1′、L2′)表示;次级绕组用T1、T2、T3、(T1′、T2′、T3′)表示。使用时根据实验接线图要求用手枪插头线分别和接线柱连接,即可完成实验要求。(注:电源线、连接导线出厂配套)。 4、发送机的刻度盘上边和接收机的指针两端均有20小格的刻度线,每一小格为3′,转角按游标尺方法读数。 5、接收机的指针圆盘直径为4cm,测量静态整步转矩=砝码重力×圆盘半径=砝码重力×2cm。 6、将固紧滚花螺钉拧松后,便可用手柄轻巧旋转发送机的刻度盘(不允许用力向外拉,以防轴头变形)。如需固定刻度盘在某刻度值位置不动,可用手旋紧滚花螺钉。 7、需吊砝码实验时,将串有砝码勾的另一线端固定在指针小圆盘的小孔上,将线绕过小圆盘上边凹槽,在砝码勾上吊砝码即可。 8、每套自整角机实验装置中的发送机、接收机均应配套,按同一编号配套。 9、自整角机变压器用力矩式自整角接收机代用。 10、需要测试激磁绕组的信号,在该部件的电源插座上插上激磁绕组测试线即可。
自整角机伺服系统的设计与仿真
四川师范大学本科毕业设计伺服系统的设计与仿真 学生姓名叶峻嘉 院系名称工学院 专业名称电子工程及其自动化 班级2008 级 2 班 学号2008180243 指导教师杨楠 完成时间2012年 5 月 15 日
伺服系统的设计与仿真 姓名:叶峻嘉指导教师:杨楠 内容摘要:伺服广义上是指用来控制被控对象的某种状态或某个过程,使其输出量能自动地、连续地、精确地复现或跟踪输入量的变化规律。其控制行为的主要特征表现为输出“服从”输入,输出“跟随”输入(为此伺服系统也叫做随动系统)。本设计选择以自整角机为检测元件的伺服系统为具体研究对象。系统包括以下几个环节:自整角机、相敏整流器、可逆功率放大器、执行机构及减速器。基于上述模型,本文通过具体实例分析了系统的稳定性、动态性能,并对系统的误差进行了简单分析,指出各种误差来源并写出具体表达式和数学关系,并针对性地提出了有效校正方案并采用串联校正装置进行仿真分析,结果表明校正后的系统总体工作稳定可靠,指标满足设计要求。 关键词:MATLAB 自整角机伺服系统动态性能仿真分析
Design and simulation of the servo system Abstract:Servo broadly refers to the variation used to control the controlled object in a state or a process, so that output can automatically,continuously and accurately reproduce or track the variation of the input.The main features of the control behavior for the output "obey" input and output follow theinput (this servo system is also called servo systems).This design choice selsyn for the detection of components for the specific object of study to servo system. The system consists of the following links: synchro, the phase-sensitive rectifier, reversible power amplifier, implementing agencies and reducer. Based on the above model, through concrete examples and analysis ofsystem stability,dynamic performance, and system errors, a simple analysis, pointing outthe various sources of error and write specific expression and mathematical relationships, and puts forward effective correction programs and using the regulatorto simulate and analyze the results show that the overall system stable and reliableindicators to meet the design requirements. Keywords: MATLAB Synchro Servo System Dynamic Correction SimulationAnalysis
流变学实验-1 转矩流变仪应用试验
转矩流变试验 胡圣飞编 一、试验原理及目的 高分子材料的成型过程,如塑料的压制、压延、挤出、注射等工艺,化纤抽丝,橡胶加工等过程,都是利用高分子材料熔体进行的。熔体受力作用,不但表现有流动和变形、而且这种流动和变形行为强烈地依赖于材料结构和外界条件,高分子材料的这种性质称为流变行为(即流变性)。测定高聚物熔体流变性质,根据施力方式不同,有多种类型的仪器,转矩流变仪是其中的一种。它由微机控制系统、混合装置(挤出机、混炼器)等组成。测量时,测试物料放入混合装置中,动力系统驱使混合装置的混合元件(螺杆、转子)转动,微处理机按照测试条件给予给定值、保证转矩流变仪在实验控制条件下工作。物料受混合元件的混炼、剪切作用以及摩擦热、外部加热作用,发生一系列的物理、化学变化。在不同的变化状态下,测试出物料对转动元件产生的阻力转矩、物料热量、压力等参数。其后,微处理机再将物料的时间、转矩、熔体温度、熔体压力、转速、流速等测量数据进行处理,得出图、表形式的实验结果。 利用转矩流变仪不同的转子结构、螺杆数、螺杆结构、挤出模具以及辅机,可以测量高分子材料在凝胶、熔融、交联、固化、发泡、分解等作用状态下的转矩—温度时间曲线,表观粘度—剪切应力(或剪切速率)曲线,了解成型加工过程中的流变行为及其规律。还可以对不同塑料的挤出成型过程进行研究,探索原材料与成型工艺、设备间的影响关系。 总之,对于成型工艺的合理选择,正确操作,优化控制,获得优质、高产、低耗制品以及为制造成型工艺装备提供必要的设计参数等,都有非常重要的意义。 高分子材料的流变性除受高聚物结构及有关复合物组成的影响外,采用混合器测量流变性质时的实验条件也是十分重要的影响因素。 二、试验用原材料 硬质PVC粒状复合物或混配物 PVC 100 60 56.52174 ACR丙烯酸酯共聚物 4 2.4 2.26 CPE氯化聚乙烯 6 3.6 3.39 钙锌复合稳定剂 4.5 2.7 2.54 硬脂酸0.5 0.3 0.28 69 64.99174 三、主要仪器设备 RM-200C转矩流变仪,主要分三部分:主机、电气控制柜、混合或挤出装置。本实验采用转矩流变仪的混合装置进行。 1. 加料量 实验开始,物料自混合器上部的加料口加入混合室,受到上顶栓对物料施加的压力并且通过转子外表面与混合室壁间的剪切、搅拌、挤压;转子之间的捏合、撕拉;轴向间翻捣、捏炼等作用,以连续变化的速度梯度和转子对物料产生的轴向力的变形实现物料的混炼、塑化。显然混合室内的物料量不足,转子难于充分接触物料,达不到混炼塑化的最佳效果。反之加入的物料过量,部分物料集中于加料口不能进入混合室塑化均匀或出现超额的阻力转
力矩式自整角机
实验报告 课程名称:控制电机 实验项目:力矩式自整角机 实验地点:电机馆一层电机实验室专业班级: 学号: 学生姓名: 指导教师:王淑红 2013年04 月25 日
一、 实验目的和要求 1、 了解力矩式自整角机精度和特性的测定方法。 2、 掌控力矩式自整角机系统的工作原理和应用知识。 二、 实验内容 1、 测定力矩式自整角机静态整步转矩与失调角的关系 ) (θf T =2、 测定力矩式自整角机的静态误差jt θ? 3、 测定力矩式自整角机的比整步转矩θT 三、 主要仪器设备 四、 操作方法与实验步骤 1、 测定力矩式自整角机静态整步转矩与失调角的关系)(θf T = (1) 确保断电情况下,按图1-3接线。 (2) 将发送机和接收机的励磁绕组加额定激磁电压220V ,待稳定 后,发送机和接收机均调整到0o 位置。固紧发送机刻度盘在该位置。 (3) 在接收机的指针圆盘上吊砝码,记录砝码重量以及接收机转轴
偏转角度。在偏转角从零至90o 之间取7~9组数据并记录于表1-4中。 2、 测定力矩式自整角机的静态误差jt ?? (1) 接线图仍按图1-3. (2) 发送机和接收机的励磁绕组加额定电压220V ,发送机的刻度盘 不固紧,并将发送机和接收机均调整到0o 位置。 (3) 缓慢旋转发送机刻盘,每转过20o ,读取接收机实际转过的角度 并记录于表1-20中。 3、 测定力矩式自整角机的比整步转矩θT (1) 比整步转矩是指在力矩式自整角机系统中,在协调位置附近, 单位失调角所产生的整步转矩称为力矩式自整角机的比整步转矩。 (2) 测定接收机的比整步转矩时,可按图1-3接线,T2’、T3’用导 线短接,在励磁绕组L1-L2两端上施加电压,在指针圆盘加砝码,使指针偏转5o 左右,测得比整步转矩。 (3) 实验在正、反两个方向各测一次,两次测两的平均值应符合标 准规定。将数据记录于表1-6中。
化工仪表及自动化实验
化工仪表及自动化实验 化工仪表及自动化实验 主编: 何京敏 中国矿业大学化工学院 过程装备与控制工程实验室 二零一零年十一月
目录 实验一化工仪表认识实验 (3) 实验二DCS认识实验 (5) 实验三、单容水箱液位PID整定实验 (9) 附录:实验二“天塔之光”参考程序 (12)
实验一化工仪表认识实验 实验项目性质:演示性 实验计划学时:2 一、实验原理 化工仪表通称为工业自动化仪表或过程检测控制仪表,用于化工过程控制。是对化工过程工艺参数实现检测和控制的自动化技术工具,能够准确而及时地检测出各种工艺参数的变化,并控制其中的主要参数,保持在给定的数值或规律,从而有效地进行生产操作和实现生产过程自动化。 化工仪表按功能可分为检测仪表、在线分析仪表和控制仪表。①检测仪表,或称化工测量仪表。用以检测、记录和显示化工过程参数的变化,实现对生产过程的监视和向控制系统提供信息。如温度、压力、流量和液位等。②在线分析仪表,主要用以检测、记录和显示化工过程特性参数(如浓度、酸度、密度等)和组分的变化,是监视和控制生产过程的直接信息。③控制仪表(又称控制器或调节仪表),用以按一定精度将化工过程参数保持在规定范围之内,或使参数按一定规律变化,从而实现对生产过程的控制。 化工仪表从过去单参数检测发展到综合控制系统装置,从模拟式仪表发展到数字式、计算机式的智能化仪表。仪表基础元器件正在向高精度、高灵敏度、高稳定性、大功率、低噪音、耐高温、耐腐蚀、长寿命、小型化、微型化方向发展。仪表的结构向模件化、灵巧化等方向发展;正在加强红外、激光、光导纤维、微波、热辐射、晶体超声、振弦、核磁共振、流体动力等多种新技术、新材料和新工艺向检测及传感器领域的渗透。以应用微型计算机技术为核心,以现代控制理论和信息论为指导,与各种新兴技术如半导体、光导纤维、激光、生化、超导及新材料等相结合,将使化工仪表进入多学科发展的新阶段。 一、实验目的 1.初步了解《化工仪表及自动化》课程所研究的各种常用的结构、类型、特点及应用。 2.了解常用传感器的结构特点及应用。 3.了解常用智能仪表的结构特点及应用。 4.了解常用电动调节阀的结构特点及应用。 5.增强对化工仪表的结构及化工过程控制的感性认识。 二、实验设备 AE2000A高级过程控制实验装置、常用传感器及仪表。 三、实验方法 学生们通过对实验指导书的学习及“实验装置”中的各种仪表的展示,实验教学人员的介绍,答疑及同学的观察去认识化工常用仪表的基本结构和原理,使理论与实际对应起来,从而增强同学对化工仪表的感性认识。并通过展示的传感器与变送、控制仪表和和执行机构等,使学生们清楚知道化工过程控制的基本组成要素—化工仪表。
流变仪
流变仪 一、简介 英文: rheogoniometer;rheometer 用于测定聚合物熔体,聚合物溶液, 悬浮液,乳液、涂料、油墨和食品等流变性质的仪器。 二、分类 1.旋转流变仪 A:控制应力型: 使用最多,如德国哈克(Haake) RS系列、美国TA的AR系列、英国Malven、奥地利Anton-Paar的MCR系列,都是这一类型的流变仪。前三家的产品马达采用托杯马达,托杯马达属于异步交流马达,惯量小,特别适合于低粘度的样品测试;Anton-Paar的流变仪采用永磁体直流马达,惯量稍大,但从原理上响应速度快,也是目前应力型流变仪的一种发展方向。这一类型的流变仪,采用马达带动夹具给样品施加应力,同时用光学解码器测量产生的应变或转速。 控制应力的流变仪由于有较大的操作空间,可以连接更多的功能附件。 B:控制应变型:目前只有美国TA的ARES属于单纯的控制应变型流变仪,这种流变仪直流马达安装在底部,通过夹具给样品施加应变,样品上部通过夹具连接倒扭矩传感器上,测量产生的应力;这种流变仪只能做单纯的控制应变实验,原因是扭矩传感器在测量扭矩时产生形变,需要一个再平衡的时间,因此反应时间就比较慢,这样就无法通过回馈循环来控制应力。 控制应变的流变仪由于硬件复杂,目前只有几种功能附件可供选择。 2.毛细管流变仪 毛细管流变仪主要用于高聚物材料熔体流变性能的测试;工作原理是,物料在电加热的料桶里被加热熔融,料桶的下部安装有一定规格的毛细管口模(有不同直径 0.25~2mm和不同长度的0.25~40mm),温度稳定后,料桶上部的料杆在驱动马达的带动下以一定的速度或以一定规律变化的速度把物料从毛细管口模种挤出来。在挤出的过程中,可以测量出毛细
液压舵机操作实验
实验三液压舵机的操作实验 一、实验内容 1、液压舵机遥控系统操舵试验与调整。 2. 电子式随动操舵系统操舵实验。 二、实验要求 通过实验,熟悉典型液压航机及遥控系统的组成和工作原理,掌握操舵方法。 三、实验设备 YD100 -1.6 / 28型液压舵机1套 D D1型电子随动操舵仪1台 (一)YD100 - 1.6 / 28型液压舵机 该舵机由广西梧州华南船舶机械厂制造。现装于辅机实验室内。 其主要技术数据如下: 型号:Y D100- 1.6/ 2 8 公称力矩: 1.6 t m(15.6 KN.M) 转舵时间:28 sec 最大转角正负35度 工作压力:100 kg/cm2 (9.81MPa) 安全阀调整压力:110kg/cm2 (10.8MPa) 电动机型号:JO2H-12-4(Y80L2一4) 电动机功率:0.8 kW 电动机转速: 1500 r.p.m. 电动机电压。380 V 油泵型号;10 SCYI4一1 油泵排量;10 m L/r 最大工作压力:320 kg/cm2(31.4MPa) 电磁阀型号: 34 E 1M-B10H-T
电磁阀流量:40L/min 电磁阀最大工作压力:210 kg/cm2(20.59 MPa) 溢流阀型号:Y E-B10 C 电磁阀流量:40 L/min 溢流阀最大工作压力:140 kg/cm2(13.73MPa) 注:转舵时间系指单机而言,双机组工作时,转舵速度可提高一倍。 1.转舵机构 舵机的转舵机构是采用柱塞式油缸,柱塞的往复运动通过拨叉机构转换为舵柄的转动。所以,舵机的输出力矩与工作油压的关系为(见图3—1)。 πd2R△P M= Z η 4 cos2a 式中:Z——油缸对数(Z=1) d——柱塞直径(d=10cm) R——舵杆中线到油缸中心线的垂直距离(R=18cm) △P——油缸压差(△P=P1—P2) η——推舵装置机械效率(η≈0.8) a——舵的转角 舵机力矩特性M=f(a)如图3—2所示。舵机公称力矩系指舵机转动舵杆的最大力矩,即舵的转角为35°时舵机的输出力矩。. 该舵机的转舵机构主要由油缸、柱塞、舵柄、边舵柄、拉杆等组成,如图3—3所示。 2.轴向柱塞式油泵 该舵机的油泵为手动变量轴向柱塞泵,其工作原理如图3-4所示。它由湖南邵阳液压件厂生产。 泵的传动轴(19)通过花键与缸体(16)连接,且带动缸体(16)旋转,使
化工仪表与自动化实验
化工仪表及自动化实验 主编: 何京敏 中国矿业大学化工学院 过程装备与控制工程实验室 二零一零年十一月
目录 实验一化工仪表认识实验 (3) 实验二 DCS认识实验 (5) 实验三、单容水箱液位PID整定实验 (9) 附录:实验二“天塔之光”参考程序 (12)
. . . . 实验一化工仪表认识实验 实验项目性质:演示性 实验计划学时:2 一、实验原理 化工仪表通称为工业自动化仪表或过程检测控制仪表,用于化工过程控制。是对化工过程工艺参数实现检测和控制的自动化技术工具,能够准确而及时地检测出各种工艺参数的变化,并控制其中的主要参数,保持在给定的数值或规律,从而有效地进行生产操作和实现生产过程自动化。 化工仪表按功能可分为检测仪表、在线分析仪表和控制仪表。①检测仪表,或称化工测量仪表。用以检测、记录和显示化工过程参数的变化,实现对生产过程的监视和向控制系统提供信息。如温度、压力、流量和液位等。②在线分析仪表,主要用以检测、记录和显示化工过程特性参数(如浓度、酸度、密度等)和组分的变化,是监视和控制生产过程的直接信息。③控制仪表(又称控制器或调节仪表),用以按一定精度将化工过程参数保持在规定围之,或使参数按一定规律变化,从而实现对生产过程的控制。 化工仪表从过去单参数检测发展到综合控制系统装置,从模拟式仪表发展到数字式、计算机式的智能化仪表。仪表基础元器件正在向高精度、高灵敏度、高稳定性、大功率、低噪音、耐高温、耐腐蚀、长寿命、小型化、微型化方向发展。仪表的结构向模件化、灵巧化等方向发展;正在加强红外、激光、光导纤维、微波、热辐射、晶体超声、振弦、核磁共振、流体动力等多种新技术、新材料和新工艺向检测及传感器领域的渗透。以应用微型计算机技术为核心,以现代控制理论和信息论为指导,与各种新兴技术如半导体、光导纤维、激光、生化、超导及新材料等相结合,将使化工仪表进入多学科发展的新阶段。 一、实验目的 1.初步了解《化工仪表及自动化》课程所研究的各种常用的结构、类型、特点及应用。 2.了解常用传感器的结构特点及应用。 3.了解常用智能仪表的结构特点及应用。 4.了解常用电动调节阀的结构特点及应用。 5.增强对化工仪表的结构及化工过程控制的感性认识。 二、实验设备 AE2000A高级过程控制实验装置、常用传感器及仪表。 三、实验方法 学生们通过对实验指导书的学习及“实验装置”中的各种仪表的展示,实验教学人员的介绍,答疑及同学的观察去认识化工常用仪表的基本结构和原理,使理论与实际对应起来,从而增强同学对化工仪表的感性认识。并通过展示的传感器与变送、控制仪表和和执行机构等,使学生们清楚知道化工过程控制的基本组成要素—化工仪表。
四种流变仪的原理
四种流变仪的原理 时间:2010-02-26 15:13来源:未知作者:珺珺点击:203次 我们常用的流变仪有四种,分别是毛细管流变仪、界面流变仪、转矩流变仪和旋转流变仪,下面大致介绍一下这四种流变仪: 我们常用的流变仪有四种,分别是毛细管流变仪、界面流变仪、转矩流变仪和旋转流变仪,下面大致介绍一下这四种流变仪: 1.毛细管流变仪 毛细管流变仪主要用于高聚物材料熔体流变性能的测试;卖仪器网工作原理是,物料在电加热的料桶里北加热熔融,料桶的下部安装有一定规格的毛细管口模(有不同直径0.25~2mm和不同长度的0.25~40mm),温度稳定后,料桶上部的料杆在驱动马达的带动下以一定的速度或以一定规律变化的速度把物料从毛细管口模种挤出来。在挤出的过程中,可以测量出毛细管口模入口出的压力,在结合已知的速度参数、口模和料桶参数、以及流变学模型,从而计算出在不同剪切速率下熔体的剪切粘度。 2.界面流变仪:目前这种流变仪有振荡液滴、振荡剪切等几种原理;是流变测试中最难以准确实现的一个领域;还没有一种特别好而又通用的方法。 3.转矩流变仪 实际上是在实验型挤出机的基础上,配合毛细管、密炼室、单双螺杆、吹膜等不同模块,模拟高聚物材料在加工过程中的一些参数,这种设备相当于聚合物加工的小型实验设备,与材料的实际加工过程更为接近,主要用于与实际生产接近的研究领域。 4.旋转流变仪:有两种,控制应力型和控制应变型 A:控制应力型:使用最多,如Physica MCR系列、TA的AR系列、Haake、Malven,都是这一类型的流变仪;其中Physica的马达属于同步直流马达,这种马达相对响应速度快,控制应变能力强;其他厂家使用的属于托杯马达,托杯马达属于异步交流马达,这种马达响应速度相对较慢。 这一类型的流变仪,采用马达带动夹具给样品施加应力,卖仪器网同时用光学解码器测量产生的应变或转速。 B:控制应变型:目前只有ARES属于单纯的控制应变型流变仪,这种流变仪直流马达安装在底部,通过夹具给样品施加应变,样品上部通过夹具连接倒扭矩传感器上,测量产生的应力;这种流变仪只能做单纯的控制应变实验,原因是扭矩传感器在测量扭矩时产生形变,需要一个再平衡的时间,因此反应时间就比较慢,这样就无法通过回馈循环来控制应力。
电气控制综合实训解析
中国矿业大学机电动力与信息工程系 《电气控制综合实训》 名称:电气控制实训 专业名称:电气工程及其自动化 班级:电气工程及其自动化(1)班学号: 姓名: 指导教师: 设计时间:2014年10月12日—11月1日实训地点: 电气控制实训成绩评定表
指导教师签字:
目录 概述 (4) 一主回路设计 (4) 二测速回路设计 (6) 三安全回路设计 (7) 四控制回路 (10) 五辅助回路 (16)
TKD-A提升机电气控制线路设计 概述 TKD-A电气控制系统是为单绳缠绕式交流提升机配套设计。该系统在加速阶段、采用转子附加电阻调速,减速阶段采用动力制动等减速方式,可实现六阶段提升。转子回路切电阻采用电流附加时间原则。该系统主要包括主回路(定子回路、转子回路)、测速回路、安全回路、控制回路、辅助回路、可调闸回路等。 一主回路设计 (一)主回路工作原理 1、定子回路 提升电动机M的定子绕组经高压隔离开关QS1、高压油断路器QFG和高压换向器(正向接触器KMZ或反向接触器KMF)及线路接触器KML与高压6KV电源相连。接触器KML及KMZ或KMF控制电动机的通断和转向。高压油断路器设有失压脱扣器LSY及过流脱扣器LGL l、LGL2,,当电源电压过低或电动机过载时,QFG断开以保护电动机,同时串接在安全回路的常开触头断开,实现安全制动;与LSY串接了两个保护开关的闭锁触头:紧急情况下供司机控制的脚踏开关SJT的常开触头,高压换向室栏栅门闭锁开关SHL的常开触头。后者的作用是,在提升机正常工作时,为保障生产和人身安全,防止人员误入换向室。
当采用动力制动时,控制回路将断开KMF或KMZ及KML,却保证动力制动接触器KMD有电,提升机电动机定子改由可控硅变流装置送入直流电。QS2和QS3分别为6KV电源进线和备用线的高压隔离开关。 2、转子回路 转子回路外接8段电阻,在加速和动力制动过程中,由加速接触器KMl-KM8分段切除,来改变电动机的起动和制动特性,以满足提升机对速度的要求,并限制转子电流。
基于MATLBA自整角机随动系统设计
摘要 位置随动系统是应用非常广泛的一类系统,主要实现执行机构对位置指令的准确跟踪,被控制量一般是负载的空间位移,当位置指令随机变化时,系统能使被控制量准确无误地跟随。在实现角位置闭环控制的伺服系统中,完成角位置测量是实现闭环控制的先决条件。角位置测量是这类控制系统的重要组成部分,同时也是实现其它控制功能的基础。自整角机(下文皆用自整角机)由于具有结构简单、工作可靠和精度高等特点,经常用于轴角的测量。本设计选择自整角机位置随动系统为具体研究对象。系统包括以下几个环节:自整角机、相敏整流器、可逆功率放大器、执行机构及减速器。基于上述模型,本文对系统的误差进行了简单分析,指出各种误差来源并写出具体表达式和数学关系,并针对性地提出了有效校正方案。在误差分析的基础上完成了系统基于MATLAB软件的仿真,具体为闭环系统在单位阶跃响应进行SIMULINK仿真,仿真结果表明自整角机位置随动系统的稳定性和快速性都达不到标准要求,此时采用PD和PID调节器进行校正,结果表明系统总体工作稳定可靠,指标满足设计要求。 关键词: MATLAB;自整角机;随动系统;自动控制系统;稳态误差
Abstract Position servo system is a very broad application class system, it mainly accomplish that the position instruction is tracked well and truly by executive actuator, controlled variables is the spatial displacement of load, when the position instruction changes random, controlled variables can be controlled precisely by the system. In accomplishing the loop control servo system of angular position, accomplishing the angular position measurement is the implementation. Angular position measurement is an important part of the control system, and the fundamental of other control function implements Synchro has simple structure, reliable and high precision characters, is often used for measurement of the rotation angle. This paper takes Synchro Position servo system for specific subjects. The system includes the following parts: Synchro, phase-sensitive rectifier, reversible power amplifier, actuators and reducer. Basing on the model, the paper analysis the system error, indicates error sources and its expression and the mathematical relationships, and put forward a reliable calibration scheme. The simulation of the system is implemented based on error analysis and simulate the step response by SIMULINK , the results show that the system’s stability and rapidity can not achieve the requirements, hence PD and PID are derived in to adjust the system. At last the results show that the system works stable and the indicators meet the design requirements . Keywords: MATLAB; Synchro; Servo System; Automatic control system; Steady-state error