Contourlet变换
Contourlet 变换
针对小波变换的缺点,2002年M.N.Do 和M.Vetterli 提出了一种“真正的”二维图像的表示方法—Contourlet 变换。
Contourlet 变换将尺度分析和方向分析分开进行。首先,采用拉普拉斯金字塔变换(Laplacian Pyramid ,LP ) 对图像进行多尺度分解,以捕获奇异点;然后,对每一级金字塔分解的带通分量用方向滤波器组(Directional Filter Bank ,DFB )进行多方向分解,将同方向的奇异“点”合成“线”,这样LP 分解得到的带通图像传递到DFB 后能获得不同方向的子带图像,经过迭代Contourlet 变换可将图像分解为多个尺度多个方向上的子带图像。因此有必要介绍Contourlet 变换多方向分解的实现过程。
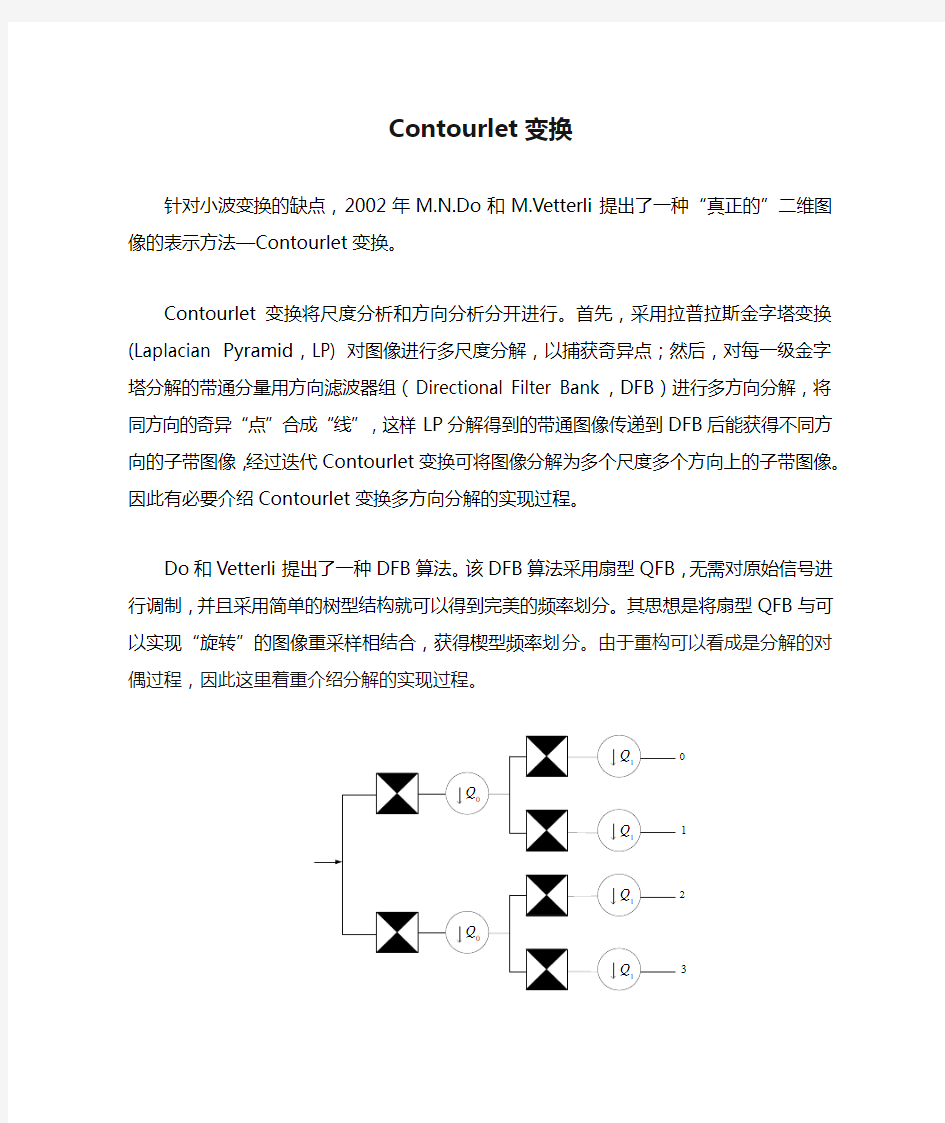
Do 和Vetterli 提出了一种DFB 算法。该DFB 算法采用扇型QFB ,无需对原始信号进行调制,并且采用简单的树型结构就可以得到完美的频率划分。其思想是将扇型QFB 与可以实现“旋转”的图像重采样相结合,获得楔型频率划分。由于重构可以看成是分解的对偶过程,因此这里着重介绍分解的实现过程。
1
2
3
图2.2 DFB 的前两层分解结构
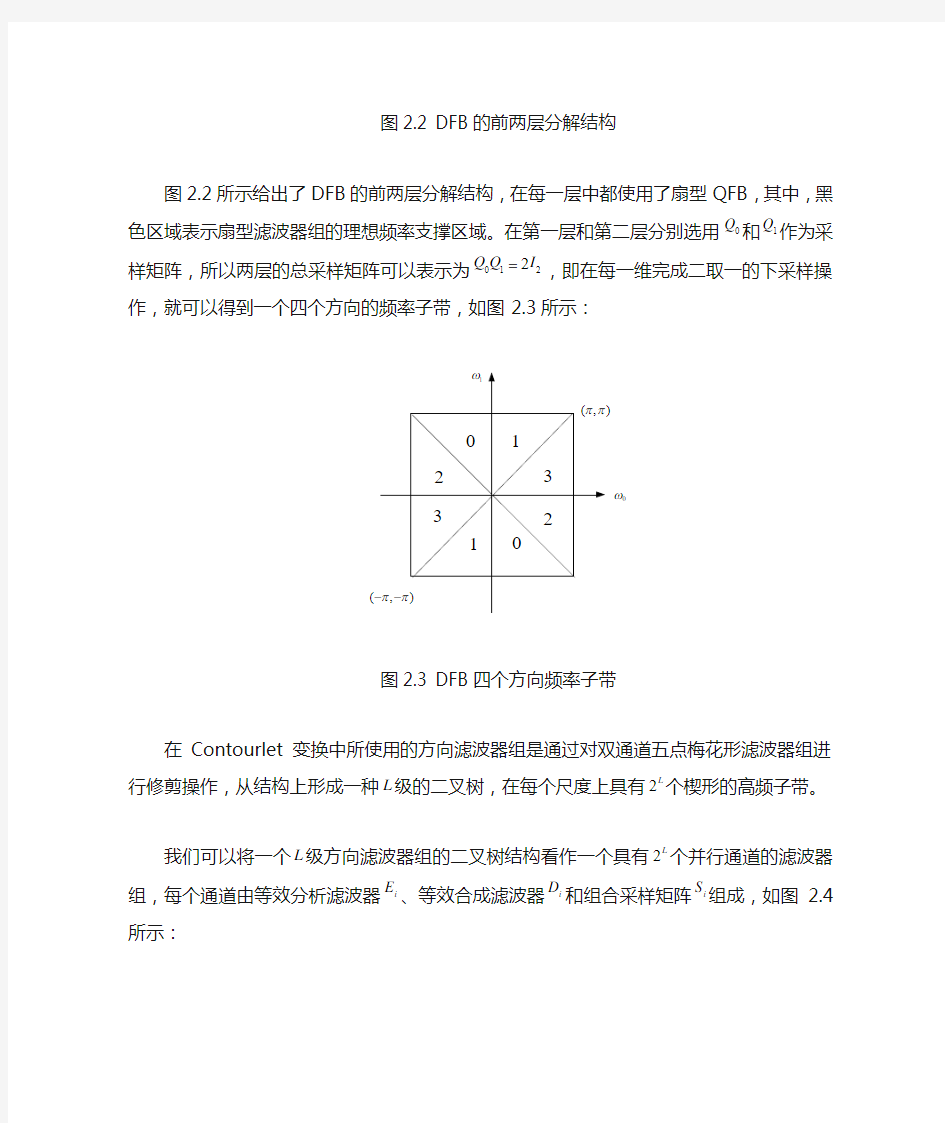
图2.2所示给出了DFB 的前两层分解结构,在每一层中都使用了扇型QFB ,其中,黑色区域表示扇型滤波器组的理想频率支撑区域。在第一层和第二层分别选用0Q 和1Q 作为采样矩阵,所以两层的总采样矩阵可以表示为0122Q Q I ,即在每一维完成二取一的下采样操作,就可以得到一个四个方向的频率子带,如图2.3所示:
(0
ω
图2.3 DFB 四个方向频率子带
在Contourlet 变换中所使用的方向滤波器组是通过对双通道五点梅花形滤波器组进行修剪操作,从结构上形成一种L 级的二叉树,在每个尺度上具有2L 个楔形的高频子带。
我们可以将一个L 级方向滤波器组的二叉树结构看作一个具有2L 个并行通道的滤波器组,每个通道由等效分析滤波器i E 、等效合成滤波器i D 和组合采样矩阵i S 组成,如图2.4所示:
?x
图2.4 等效分析滤波器
因为Contourlet 变换基的支撑区间是随尺度变化的“长条形”结构,基函数的形状可以拉伸,并且拉伸的方向是可以改变的,这样使其拥有良好的各向异性,可以捕捉图像中的光滑线段,故对于图像边缘的方向和纹理信息的表达具有一定的优势。Contourlet 变换将多尺度分解和方向分解分开进行,因此在不同尺度上可以实现不同数目的方向分解,从而它能更灵活的实现多尺度和多方向分解。从分析可知,Contourlet 变换具有更好的多分辨率、局部性、方向性和各向异性的优点,能更加有效地捕获图像的边缘信息。
医学图像变换
第四章 医学图像变换 在医学图像处理与分析中广泛应用着各种图像变换技术,它们是图像处理与分析的重要工具之一,通过各种图像变换来转换图像的表示域以及表示数据,给后续的图像处理工作带来极大的方便。图像变换是一种为了达到某种目的而对图像使用的一种数学操作,经过图像变换后的图像将能够更方便、更容易地被处理和操作,因此图像变换在图像增强、图像复原、图像编码、特征抽取等方面有着广泛的应用。例如,傅立叶变换可使处理分析在频域中进行,使运算更简便;某些图像经过变换后往往能反映出图像的灰度结构特征,从而更便于分析;还有许多变换可使变换后的能量集中在少数数据上,从而便于实现数据压缩、图像传输和存储等等方面。 在实际的图像处理中,图像变换可以看作是一个数学问题,即对原图像函数寻找一个合适的变换核,但本质上来说,图像变换有着深刻的物理背景。常用的图像变换方法主要有:傅立叶变换、余弦变换、小波变换、哈达玛变换、K —L 变换、哈尔变换、斜变换等。由于傅立叶变换和小波变换目前应用的较为普遍,并且在理论上也比较重要,所以本章将重点讨论这两种图像变换形式。 第一节 傅立叶变换 傅立叶变换是一种正交变换,它广泛地应用于很多领域,从某种意义上说,傅立叶变换就是函数的第二种描述语言,掌握了傅立叶变换,人们就可以在空域和频域中同时思考处理问题的方法。由于它不仅能把空间域中复杂的卷积运算转化为频率域中的乘积运算,还能在频率域中简单而有效地实现增强处理和进行特征抽取,因而在图像处理中也得到了广泛的应用。 一、一维傅立叶变换 一维连续信号的傅立叶正变换和反变换的数学表达式如下: dx e x f u F ux j ?∞ ∞--=π2)()( (4.1) du e u F x f ux j ?∞ ∞-=π2)()( (4.2)
(整理)坐标变换的原理和实现方法.
由第二讲的内容可知,在三相静止坐标系中,异步电动机数学模型是一个多输入、多输出、非线性、强耦合的控制对象,为了实现转矩和磁链之间的解耦控制,以提高调速系统的动静态性能,必须对异步电动机的数学模型进行坐标变换。 3.1 变换矩阵的确定原则 坐标变换的数学表达式可以用矩阵方程表示为 y=ax (3-1) 式(3-1)表示利用矩阵a将一组变量x变换为另一组变量y,其中系数矩阵a称为变换矩阵,例如,设x是交流电机三相轴系上的电流,经过矩阵a的变换得到y,可以认为y是另一轴系上的电流。这时,a称为电流变换矩阵,类似的还有电压变换矩阵、阻抗变换矩阵等,进行坐标变换的原则如下: (1)确定电流变换矩时,应遵守变换前后所产生的旋转磁场等效的原则; (2)为了矩阵运算的简单、方便,要求电流变换矩阵应为正交矩阵; (3)确定电压变换矩阵和阻抗变换矩阵时,应遵守变换前后电机功率不变的原则,即变换前后功率不变。 假设电流坐标变换方程为: i=ci′ (3-2) 式中,i′为新变量,i称为原变量,c为电流变换矩阵。 电压坐标变换方程为: u′=bu (3-3) 式中,u′为新变量,u为原变量,b为电压变换矩阵。 根据功率不变原则,可以证明: b=ct (3-4)
式中,ct为矩阵c的转置矩阵。 以上表明,当按照功率不变约束条件进行变换时,若已知电流变换矩阵就可以确定电压变换矩阵。 3.2 定子绕组轴系的变换(a-b-c<=>α-β) 所谓相变换就是三相轴系到二相轴系或二相轴系到三相轴系的变换,简称3/2变换或2/3变换。 三相轴系和二相轴系之间的关系如图3-1所示,为了方便起见,令三相的a轴与两相的α 轴重合。假设磁势波形是按正弦分布,或只计其基波分量,当二者的旋转磁场完全等效时,合成磁势沿相同轴向的分量必定相等,即三相绕组和二相组绕的瞬时磁势沿α、β轴的投影应该相等,即: (3-5) 式中,n3、n2分别为三相电机和两相电机每相定子绕组的有效匝数。 经计算并整理之后可得: (3-6) (3-7)
Contourlet变换
Contourlet 变换 针对小波变换的缺点,2002年M.N.Do 和M.Vetterli 提出了一种“真正的”二维图像的表示方法—Contourlet 变换。 Contourlet 变换将尺度分析和方向分析分开进行。首先,采用拉普拉斯金字塔变换(Laplacian Pyramid ,LP ) 对图像进行多尺度分解,以捕获奇异点;然后,对每一级金字塔分解的带通分量用方向滤波器组(Directional Filter Bank ,DFB )进行多方向分解,将同方向的奇异“点”合成“线”,这样LP 分解得到的带通图像传递到DFB 后能获得不同方向的子带图像,经过迭代Contourlet 变换可将图像分解为多个尺度多个方向上的子带图像。因此有必要介绍Contourlet 变换多方向分解的实现过程。 Do 和Vetterli 提出了一种DFB 算法。该DFB 算法采用扇型QFB ,无需对原始信号进行调制,并且采用简单的树型结构就可以得到完美的频率划分。其思想是将扇型QFB 与可以实现“旋转”的图像重采样相结合,获得楔型频率划分。由于重构可以看成是分解的对偶过程,因此这里着重介绍分解的实现过程。 1 2 3 图2.2 DFB 的前两层分解结构 图2.2所示给出了DFB 的前两层分解结构,在每一层中都使用了扇型QFB ,其中,黑色区域表示扇型滤波器组的理想频率支撑区域。在第一层和第二层分别选用0Q 和1Q 作为采样矩阵,所以两层的总采样矩阵可以表示为0122Q Q I ,即在每一维完成二取一的下采样操作,就可以得到一个四个方向的频率子带,如图2.3所示:
(0 ω 图2.3 DFB 四个方向频率子带 在Contourlet 变换中所使用的方向滤波器组是通过对双通道五点梅花形滤波器组进行修剪操作,从结构上形成一种L 级的二叉树,在每个尺度上具有2L 个楔形的高频子带。 我们可以将一个L 级方向滤波器组的二叉树结构看作一个具有2L 个并行通道的滤波器组,每个通道由等效分析滤波器i E 、等效合成滤波器i D 和组合采样矩阵i S 组成,如图2.4所示: ?x 图2.4 等效分析滤波器 因为Contourlet 变换基的支撑区间是随尺度变化的“长条形”结构,基函数的形状可以拉伸,并且拉伸的方向是可以改变的,这样使其拥有良好的各向异性,可以捕捉图像中的光滑线段,故对于图像边缘的方向和纹理信息的表达具有一定的优势。Contourlet 变换将多尺度分解和方向分解分开进行,因此在不同尺度上可以实现不同数目的方向分解,从而它能更灵活的实现多尺度和多方向分解。从分析可知,Contourlet 变换具有更好的多分辨率、局部性、方向性和各向异性的优点,能更加有效地捕获图像的边缘信息。
三相坐标系和二相坐标系转换
交流电动机矢量控制变压变频调速系统(三)第三讲坐标 变换的原理和实现方法 收藏此信息打印该信息添加:李华德来源:未知 由第二讲的内容可知,在三相静止坐标系中,异步电动机数学模型是一个多输入、多输出、非线性、强耦合的控制对象,为了实现转矩和磁链之间的解耦控制,以提高调速系统的动静态性能,必须对异步电动机的数学模型进行坐标变换。 3.1 变换矩阵的确定原则 坐标变换的数学表达式可以用矩阵方程表示为 y=ax (3-1) 式(3-1)表示利用矩阵a将一组变量x变换为另一组变量y,其中系数矩阵a称为变换矩阵,例如,设x是交流电机三相轴系上的电流,经过矩阵a的变换得到y,可以认为y是另一轴系上的电流。这时,a称为电流变换矩阵,类似的还有电压变换矩阵、阻抗变换矩阵等,进行坐标变换的原则如下: (1)确定电流变换矩时,应遵守变换前后所产生的旋转磁场等效的原则; (2)为了矩阵运算的简单、方便,要求电流变换矩阵应为正交矩阵; (3)确定电压变换矩阵和阻抗变换矩阵时,应遵守变换前后电机功率不变的原则,即变换前后功率不变。 假设电流坐标变换方程为: i=ci′ (3-2) 式中,i′为新变量,i称为原变量,c为电流变换矩阵。 电压坐标变换方程为: u′=bu (3-3) 式中,u′为新变量,u为原变量,b为电压变换矩阵。 根据功率不变原则,可以证明: b=ct (3-4)
式中,ct为矩阵c的转置矩阵。 以上表明,当按照功率不变约束条件进行变换时,若已知电流变换矩阵就可以确定电压变换矩阵。 3.2 定子绕组轴系的变换(a-b-c<=>α-β) 所谓相变换就是三相轴系到二相轴系或二相轴系到三相轴系的变换,简称3/2变换或2/3变换。 三相轴系和二相轴系之间的关系如图3-1所示,为了方便起见,令三相的a轴与两相的α轴重合。假设磁势波形是按正弦分布,或只计其基波分量,当二者的旋转磁场完全等效时,合成磁势沿相同轴向的分量必定相等,即三相绕组和二相组绕的瞬时磁势沿α、β轴的投影应该相等,即: (3-5) 式中,n3、n2分别为三相电机和两相电机每相定子绕组的有效匝数。 经计算并整理之后可得: (3-6) (3-7) 图3-1 三相定子绕组和二相定子绕组中磁势的空间矢量位置关系
基于Contourlet 变换的稳健性图像水印算法
基于Contourlet 变换的稳健性图像水印算法 摘要:提出了基于Contourlet 变换的数字图像水印算法。与小波变换不同的是,Contourlet 变换采用类似于线段 (contour segment)的基得到一种多分辨、局部化、方向性的图像表示。水印信号通过基于内容的乘性方案加载 到Contourlet 变换系数。在采用零均值广义高斯分布拟合Contourlet 变换系数的基础上,提出采用极大似然估计 实现水印的盲检测。依据Neyman-Pearson 准则,在给定虚警率的情况下对判决准则进行了优化。实验结果表明 在保证水印隐蔽性的前提下,水印对常见的信号处理手段以及几何变换具有很好的稳健性。关键词:数字水印;Contourlet 变换;广义高斯分布;极大似然检测;Neyman-Pearson 准则 Robust image watermarking algorithm based on contourlet transform Abstract: A novel robust watermarking algorithm in Contourlet domain was proposed. The Contourlet transform was adopted by virtual of its advantages over the wavelet transform. A flexible multiresolution, local, and directional image expansion was obtained using contour segments. The watermark was inserted through content-adaptive multiplicative embedding. The Contourlet coefficients were modeled as generalized Gaussian distribution (GGD) with zero mean. Then the maximum likelihood watermark detection method was developed. Under the Neyman-Pearson criterion, the decision rule was optimized by minimizing the probability of missing the watermark for a given false detection rate. Experimental results demonstrate that the proposed algorithm is invisible, and robust to signal processing. Key words: digital watermarking; Contourlet transform; generalized Gaussian distribution; maximum-likelihood detection; Neyman-Pearson criterion 1 引言 数字水印技术是近年来信号处理和信息安全领域的研究热点之一,其核心是在不影响数据可用性的前提下把不可移除的水印信号嵌入在待保护的原始信号中。水印信号可以完整地、正确地提取或检测出来,以解决所有权纠纷、盗版跟踪等问题。 常见的图像水印算法将水印信号镶嵌在图像变换(DCT、DFT 和DWT 等)后的系数中,利用相关检测判断水印存在与否[1,2]。基本原理阐述如下:计算可疑作品与水印信号之间的相关系数,通过事先设定的阈值T 判断可疑作品中是否存在相应的水印。一个典型的水印相关检测器由两部分构成:相关系数的计算和判决阈值的确定,如图 1 所示。可疑作品?I 与原始水印W 之间的相关系数的计算公式如式(1) 图1 数字水印相关检测器 可以证明,当嵌入水印的变换系数服从高斯分布时,基于相关的检测方法是最优的,
坐标变换总结Clark变换和Park变换
一个坐标系的坐标变换为另一种坐标系的坐标的法则。 由于交流异步电动机的电压、电流、磁通和电磁转矩各物理量之间是相互关联的强耦合,并且其转矩正比与主磁通与电流,而这两个物理量是随时间变化的函数,在异步电机数学模型中将出现两个变量的乘积项,因此,又为多变量,非线性系统(关键是有一个复杂的电感矩阵),这使得建立异步电动机的准确数学模型相当困难。为了简化电机的数学模型,需从简化磁链入手。 解决的思路与基本分析: 1.已知,三相( ABC )异步电动机的定子三相绕组空间上互差120度,且通以时间上互差120 ω的旋转磁场。 度的三相正弦交流电时,在空间上会建立一个角速度为 1 又知,取空间上互相垂直的(α,β)两相绕组,且在绕组中通以互差90度的两相平衡交流电流时,也能建立与三相绕组等效的旋转磁场。此时的电机数学模型有所简化。 2. 还知, 直流电机的磁链关系为: F---励磁绕组 轴线---主磁通的方向,即轴线在d轴上,称为直轴(Direct axis)。 A---电枢绕组 轴线---由于电枢绕组是旋转的,通过电刷馈入的直流电产生电枢磁动势,其轴线始终被限定在q轴,即与d轴成90度,称为交轴(Quadrature axis)。 由于q轴磁动势与d轴主磁通成正交,因此电枢磁通对主磁通影响甚微。换言之,主磁通唯一地由励磁电流决定,由此建立的直流电机的数学模型十分简化。 如果能够将三项交流电机的物理模型等效的变换成类似的模型,分析和控制就变得大大简单了。 电机模型彼此等效的原则:不同坐标系下产生的磁动势(大小、旋转)完全一致。 关于旋转磁动势的认识: 1) 产生旋转磁动势并不一定非要三相绕组不可。结论是:
第9章Contourlet变换及其应用
Joint
超小波分析及应用
Prof. Jingwen Yan jwyan@https://www.360docs.net/doc/988094113.html,
https://www.360docs.net/doc/988094113.html,, https://www.360docs.net/doc/988094113.html,
第九章 Contourlet变换及其应用
9.1 Contourlet的原理
9.1.1 拉普拉斯金字塔(LP) 9.1.2方向滤波器(DFB) 9.1.3多尺度、多方向分解:塔型方向滤波器组
9.2 Contourlet的应用
9.2.1基于Contourlet变换的图像去噪 9.2.2 基于Contourlet变换的图像融合
9.3 基于Contourlet变换的图像增强
9. 3.1 构建NSCT 9.3.2 NSCT图形增强算法 9. 3.3 实验结果
Joint Laboratory of Shantou and Xiamen University, 2008
2
9.1 Contourlet的原理
Contourlet变换是用类似于轮廓段(Contour segment)的基结 构来逼近图像。基的支撑区间是具有随尺度变化长宽比的 “长 条形”结构,具有方向性和各向异性,Contourlet系数中,表 示图像边缘的系数能量更加集中,或者说Contourlet变换对于 曲线有更“稀疏”的表达。而二维小波是由一维小波张量积构建 得到,它的基缺乏方向性,不具有各向异性。只能限于用正方 形支撑区间描述轮廓,不同大小的正方形对应小波的多分辨率 结构。当分辨率变得足够精细,小波就变成用点来捕获轮廓, 两种变换对曲线的描述如图9.1所示。
Joint Laboratory of Shantou and Xiamen University, 2008
3
基于Contourlet的图像PCA去噪方法(精)
462007,43(21)ComputerEngineeringandApplications计算机工程与应用 基于Contourlet的图像PCA去噪方法 张久文,敦建征,孟令锋 ZHANGJiu-wen,DUNJian-zheng,MENGLing-feng 兰州大学信息科学与工程学院,兰州730000 SchoolofInformationScience&EngineeringofLanzhouUniversity,Lanzhou730000,ChinaE-mail:dunjzh04@lzu.cn ZHANGJiu-wen,DUNJian-zheng,MENGLing-feng.Contourletimagede-noisingbasedonprincipalcomponentanalysis.ComputerEngineeringandApplications,2007,43(21):46-48. Abstract:Thispaperproposesanewmethodwhichutilizesnoiseenergy,insteadofitsvariance,toperformimagede-noisingbasedonPrincipalComponentAnalysis(PCA)inContourletdomain.TheContourlettransformisanewextensionofthewavelettransformintwodimensions.Itsmainfeatureiscombiningnon-separabledirectionalfilterwithwaveletfilter.Mostoftheexistingmethodsforimagede-noisingrelyonaccurateestimationofnoisevariance.However,theestimationofnoisevarianceisveryhardinContourletdomain.Proposeanewmethodforimagede-noisingbasedontheContourlettransform.Experimentsinde-noisingthetypicalimageBarbarashowthattheperformanceoftheproposedmethodisobviouslysuperiorbothinvisionandinPSNR.Keywords:Contou
基于Contourlet变换和形态学的图像去噪方法
基于C ontou rlet变换和形态学的图像去噪方法33 杨 露1,23,苏秀琴1,陆 陶1,2,梁金峰1,2,张占鹏1,2 (1.中国科学院西安光学精密机械研究所,陕西西安710119;2.中国科学院研究生院,北京100039) 摘要:提出了一种C ontourlet变换与数学形态算子相结合的红外图像去噪方法。充分利用C ontourlet变换后系数的分布特性以及尺度内和尺度间的依赖性,结合数学形态算子的特点,利用数学形态算子对变换系数进行处理,使得重要变换系数与非重要变换系数分离,对非重要系数子集进行软阈值处理,然后再将两个子集合起来,进行逆变换重建。实验结果表明,与传统小波相比,该算法具有更好地去噪效果,同时更有效地保留了图像的细节信息。 关键词:图像去噪;C ontourlet变换;数学形态学;多尺度几何分析 中图分类号:TP391.41 文献标识码:A 文章编号:100520086(2008)1121558203 Im age d e2noising app ro ach b ased on contou rlet transform and morphology Y ANG Lu1,23,SU X iu2qin1,LU T ao1,2,LIANGJin2feng1,2,ZHANG Zhan2peng1,2 (1.X i′an Institute of Optics and Precision Mechanics,X i′an710119,China;2.G raduate School,Chinese Academy of Sciences,Beijing100039,China) Abstract:An image de2noising algorithm based on C ontourlet transform and mathematical m orphology was proposed.The statistics of the C ontourlet coefficients of an image were studied,the coefficients of C ontourlet transform of an image were manipulated by m orphological operator,and m orphological dilation was applied to extract the clustered significant coefficients in each subband,which result in the partition of each subband into significance clusters and insignificance space.Then,the smoothing image of the input image was using gotten the soft2thresholding method in insignificance space.Finally,two sub2 sets were combined and the image was reconstructed.The experimental results demonstrate that compared with the tradi2 tional wavelet transform,this algorithm can denoise effectively,and keep the detail information.The method can improve the signal2to2noise ratio. K ey w ords:image denoising;C ontourlet transform;mathematical morphology;multiscale geometric analysis 1 引 言 近年来,小波变换在信号处理中得到了广泛应用,主要是由于它们对一维分段光滑函数有良好的非线性近似效果,同时能将信号能量集中到少数小波系数上,而白噪声在任何正交基上的变换仍然是白噪声,相对而言,信号的小波系数必然大于那些能量分散且幅值较小的噪声的小波系数,因此只要选择一个合适的阈值,对小波系数进行阈值处理,就可以达到去除噪声保留信号的目的。小波阈值方法由于其简单有效性,在图像去噪中得到了广泛的应用[1,2]。然而,二维小波变换,是由一维小波变换直接用张量积扩展得到的,因此只具有有限的方向,无法用来最优表示含有线奇异点或者面奇异点的高维函数。所以小波变换不能充分利用数据本身所特有的几何特征,捕获图像中的边缘方向信息。2002年Do等人[3]提出了一种新的多尺度变换———C ontourlet变换。C ontonrlet变换是一种真正的图像二维表示方法,具有多分辨特性、局域性、方向性的优点。杨 [4]提出了一种基于层结构的C ontourlet多阈值去噪算法,将硬阈值算法与基于子带相关的图像去噪方法相结合,根据C ontourlet变换后各层分解的系数数目及噪声强度设定阈值,并利用硬阈值函数实现图像去噪。郭旭静[5]建立一种离散变换全相位C ontourle变换,在多级分解中利用全相位分级方法,使得分级方法在重建时只需要对低频图像内插,再与高频部分相加即可,计算量与拉普拉斯金字塔分解相比大大简化了,由于全相位内插的优异性能,在图像去噪中,性能优于原C ontourlet变换的结果。郭旭静[6]通过相关性强弱区分噪声与信号系数,并结合阈值方法,提出了一种非下采样C ontourlet 的尺度间相关的图像去噪新算法。利用信号和噪声在变换域内这种相关性的不同可区分系数的类别,进行取舍,达到分离噪声的目的。 本文在C ontourlet变换的基础上结合数学形态算子的特点提出一种新的图像去噪算法。新的算法用数学形态膨胀算子对图像变换后的系数进行处理,以去除噪声,保留边缘信号,将处理后的变换系数用于图像重构,得到去噪后的图像。 光电子?激光 第19卷第11期 2008年11月 Journal of Optoelectronics?Laser Vol.19No.11 Nov.2008 3 收稿日期:2007207216 修订日期:2008202227 3 E2m ail:yanglu.6314@https://www.360docs.net/doc/988094113.html,
伽利略变换
§2、2 伽利略变换 2、2、1 伽利略变换 (1) 如图2-2-1所示,有两个惯性 系S 和'S , 它们对应的坐标轴相互平行, 且 当t ='t =0时,两系的坐标原点'O 与O 重合。 设'S 系相对于S 系沿x 轴正方向以速度u 运动。 同一质点P 在某一时刻在S 系中的时空坐标为(x,y,z,t),在S`系中的时空坐标为 (x’,y’,z’,t’) ???????===-=t t z z y y ut x x '''' 即 t u r r -='或 (1) x=x ' +ut ??? ??==='''t t z z y y 即 t u r r +=' 式(1)称为伽利略时空坐标变换公式。 (2)将式(1)中的空间坐标分别对时间求一次导数得: 图2-2-1
??? ??? ???====-=-==z z y y x x v dt dz v v dt dy v u v u dt dx dt dx v '' '''' 即u v v -= ' 或??? ??? ???======+=+==z z y y x x v dt dz dt dz v v dt dy dt dy v u v u dt dx dt dx v '''''1即u v v '+'= (2) 式(2)称为伽利略速度变换公式。 (3)将式(2)再对时间求一次导数得 ??? ??? ???=='='=='='=='='z z z z y y y y x x x x a dt dv dt v d a a dt dv dt v d a a dt dv dt v d a 即a a =' ??? ??' ='='=z z y y x x a a a a a a a a '= (3) 式(3)表明在伽利略变换下加速度保持不变。式(3)称为伽利略加速度变换公式。 2、2、2 经典力学的时空观 (1) t=t ',或Δt=Δt ' (4) (2) Δr '=2 12212212222)()()()()()(z z y y x x z y x -+-+-=?+?+?, Δr '=212212212222)()()()()()(z z y y x x z y x -+-+-=?+?+?。 因,,)()(1212121212 y y y y x x ut x ut x x x -='-'-=---='-' r r z z z z ?='?-='-'所以,1212 (5)
第三章 坐标变换
第三章 坐标变换 3.1 时空矢量图 根据电路原理,凡随时间作正弦变化的物理量(如电动势、电压、电流、磁通等)均可用一个以其交变频率作为角速度而环绕时间参考轴(简称时轴t )逆时针旋转的时间矢量(即相量)来代替。该相量在时轴上的投影即为该物理量的瞬时值。我们这里介绍的时空矢量图表示法是一种多时轴单相量表示法,即每相的时间相量都以该相的相轴作为时轴,而各相对称的同一物理量用一根统一的时间向量来代表。如图3-1所示,只用一根统一的电流相量1I (定子电流)即可代表定子的对称三相电流。不难证明,1I 在A 上的投影即为该时刻A i 瞬时值;在B 上的投影即为该时刻B i 瞬时值;在C 上的投影即为该时刻C i 瞬时值。 有了统一时间相量的概念,我们就可以方便地将时间相量跟空间矢量联系起来,将他们画在同一矢量图中,得到交流电机中常用的时空矢量图。在图3-2所示的时空矢量图中,我们取各相的相轴作为该相的时轴。假设某时刻 m A I i +=达到正最大,则此时刻统一相量A I 应 与A 重合。据旋转磁场理论,这时由定子对称三相电流所生成的三相合成基波磁动势幅值应与A 重合,即1F 应与A 重合,亦即与1I 重合。由于时间相量1I 的角频率ω跟空间矢量1F 的电角速度1ω相等,所以在任何其他时刻,1F 与1I 都始终重合。为此,我们称1I 与由它所生成的三相合成基波磁动势1F 在时空图上同相。在考虑铁耗的情况下,1B 应滞后于1F 一个铁 耗角Fe α,磁通相量m Φ 与1B 重合。定子对称三相电动势的统一电动势相量1 E 应落后于m Φ 为90度。 由电机学我们知道,当三相对称的静止绕 组A 、B 、C 通过三相平衡的正弦电流A i 、B i 、 c i 时产生的合成磁势F ,它在空间呈正弦分布,并以同步速度ω(电角速度)顺 着A 、B 、C 的相序旋转。如图3-3-a 所示,然而产生旋转磁势并不一定非要三相电流不可,三相、四相等任意多相对称绕组通以多相平衡电流,都能产生旋转磁势。如图3-3-b 所示,所示为两相静止绕组α、β,它们在空间上互差90度,当它们流过时间相位上相差90度的两相平衡的交流电流αi 、βi 时,也可以产生旋转磁动势。当图3-3-a 和图3-3-b 的两个旋转磁动势大小和转速都相等时,即认为图3-3-a 中的两相绕组和图3-3-b 中三相绕组等效。再看图3-3-c 中的两个 图3-2 时空矢量图
坐标变换
坐标变换 2-1: 变换概述 一个电机系统的磁链方程可以写成: 假定存在一个非奇异矩阵T ,将Φ变换成Φc ,将I 变换成Ic : 新的磁链φ1、 φ2、…、 φn 称为实际磁链φA 、 φB 、…、 φN 的分量;同样i1、i2、…、in 称为实际电流的分量。利用这个变换,磁链方程变成: 所以 或者 其中 如果变换T 明显使得新的电感矩阵L c 较变换前的电感矩阵L 简单,这个变换才是有意义的。如果L c 变成一个对角矩阵,那这个变换是最理想的: 2-2.1 电感矩阵的特点 由于互感的对等性,电感矩阵是对称矩阵: A A A B AN A B BA B BN B N NA NB N N L M M i M L M i M M L i ?????????????????????===???????????????????ΦL I [][]1212,,c c n c c n i i i ???=?==?=ΦT ΦΦI T I I 11c c c c c c c c --=?=??=?=??T ΦL TI ΦT L TI ΦL I L T L T 111222000000c c c n n n L i L i L i ??????????????? ??????===??????????????????ΦL I
由于Mij=Mji, n 阶对称矩阵中只有n(n+1)/2各不同的元素。 n 相对称系统的电感矩阵是循环的 n 相对称系统中各相自感相等,相同相对位置的两相间的互感相等。即: 这样的矩阵称为循环矩阵。n 阶循环矩阵只有n 个不同的元素: 若n 阶循环矩阵又是对称的,则根据n 是奇数或偶数,其中只有(n+1)/2或(n+2)/2个不同的元素。 最简单的循环矩阵 不难证明,循环电感矩阵可以表示成 A A B A C AN AB B BC BN AC BC C CN AN BN CN N L M M M M L M M M M L M M M M L ????????=????????L ,1,1,i j i j i j L L M M ++==A AB AC AN AN A A B AM AM AN A AL AB A C A D A L M M M M L M M M M L M M M M L ????????=????????L 01000001000000110000????????=???????? π 21n A AB AC AN L M M M -=++++L 1πππ
基于同步旋转坐标变换的三相锁相环设计
基于同步旋转坐标变换的三相锁相环设计X 潘龙懿,李 治 (华北电力大学电力工程系,河北保定 071003) 摘 要:本文分析了有源电力滤波器需要实时检测正序基波电压的相位,作为计算和补偿标准。着重研究了基于同步旋转坐标变换的三相锁相环软件技术,分析了连续和离散数学模型,提出实现全数字化相位跟踪检测的方法。最后采用MA TLAB的定点符号工具箱和Sim ulink进行仿真。理论推导和仿真验证了所提方法在电压波形畸变时仍实时可有效检测出正序基波相位。 关键词:同步旋转坐标变换;锁相环;有源电力滤波器;定点仿真 0 引言 在对电网谐波治理和无功补偿装置的设计中,有源电力滤波器是非常重要的环节。锁相环技术广泛应用于电力电子装置的控制,用以获得瞬时相位信息,提高计算和补偿基准,其滤波和动态响应对提高有源电力滤波器性能至关重要。在存在电压畸变(如谐波、频率突变、相位突变)以及三相不平衡情况下,锁相环必须能够准确快速地锁定正序基波电压相位。过零比较锁相环〔1〕通过检测输入信号过零点来计算相位,但过零点检测对谐波和直流偏移非常敏感,且动态性能较差。 对于三相电网,采用提取单相的方法很难精确的实现dq0旋转坐标系与电网三相电压合成矢量的同步,必须综合三相电压的相位信息,采用三相软件同步的方法来实现相位同步,获取需要的基波电压相位〔1〕〔2〕〔3〕。 三相锁相环(Soft Phase-Locked Loop,即SPLL)在波形畸变、相位突变等条件下,都具有良好的抗干扰能力,更适合应用在电磁环境恶劣的有源电力滤波系统中〔3〕。它利用同步旋转坐标变换检测角频率和相位信息,动静态特性较理想,能够满足有源电力滤波器实时检测基波相位的要求;同时,通过合理设计控制器参数,它对零序和负序分量、谐波、直流偏移也有较好的抑制能力。 一些基于DSP的数字锁相的算法,利用反三角函数计算得到相位信息〔4〕。因求解反三角函数值是一项繁琐费时的计算,虽可用查找表来提高反三角函数的计算速度,则会引起计算精度的大幅度下降,带来不容忽视的计算误差。 本文在分析同步旋转坐标变换的原理基础上,提出实现全数字化相位跟踪检测的方法。详细阐述了SPLL的工作原理,提出通过延时反馈以提高相位跟踪精度以及通过归一化使PI增益为常数的基波频率和相位的检测方法,最后通过MAT LAB的Fixed Po int Too lbo x和SimuLink对该方法进行验证。仿真表明,该SPLL的稳态性能好,对畸变电压有很强的抑制作用,可应用于有源电力滤波器的实时相位检测。 1 三相锁相环基本原理 三相锁相环是一个相位误差反馈系统,由基于同步旋转坐标变换原理的数字鉴相器、低通滤波器和压控振荡器组成,其基本工作原理是数字鉴相器将输入的三相电压信号和SPLL内部同步信号的相位差转变为直流量,经过低通滤波器后去控制压控振荡器,从而调整系统内部信号的频率和相位,使之和输入电压的相位同步。 1.1 同步旋转坐标变换 同步旋转坐标变换实际上由从静止abc坐标系到A B0坐标系的变换和从A B0到dq0旋转坐标系的变换组成,变换原理图1 所示。 图1 同步旋转坐标变换 X收稿日期:2008-08-22 作者简介:潘龙懿(1983-),男,山东潍坊人,汉族,硕士,主要研究方向电压稳定和无功优化。
坐标变换原理的深入理解
坐标变换原理的深入理解 在abc 三相静止坐标中的描述: 由于三相电压电流为的幅值相等、相位相差120°的正弦量,所以在电路分析中采用abc 三相静止坐标系中图1-1形象表示。 说明:图中Va 、Vb 、Vc 矢量表示三相电压,其模长表示电压幅值或有效值,但是Va 、Vb 、Vc 都是正弦变化的量。 同时也可以用以个空间旋转矢量V 表示,其模长等于电压幅值, 旋转速度为电源电压角频率ω。则三相电压表示为: cos va V θ= ()cos 120vb V θ=- ()cos 120vc V θ=+ 在αβ静止坐标系中的描述: “等量”(通用矢量相等)变换 “等功率”变换 01112220322 11122 2a b c v v v v v v αβ??- - ????? ??? ???=-? ??? ??????? ??????? ? 3/211122022s s C ? ?- - ??= -????()01 3 a b c v v v v = ++ 理解:1.数学上理解即通过某一规则(变换矩阵)来实现坐标系的变换。 2.几何图形上理解,正是因为三相电压可以用通用矢量描述,而通用矢量在平面上,可以用abc 三轴描述,当然也就可以用两个轴αβ轴描述。 3.由于通用矢量是旋转的(在表达式中用正余弦函数表达) 下的电压任然是正弦变化的。 在d q 坐标系中的描述: “等量”变换 “等功率”变换 0cos cos(120)cos(120)2sin 3111 2 2sin(120)sin(120)2d a b q c v v v v v v θθθθθθ? ? ??-+?? ?? ? ? ???=-?? ??? ????????? ? ??? ---+ 注意:此方程对应于t=0时,d 轴与轴重合。为了以电压定向开始常乘以电压相位PLL 输出 。此公式在simulink 的dq 坐标变换帮组文件中有正确的公式,书上很多错误。 cos t vc Vc =ωcos t vb Vb =ωcos t va Va =ω图1-1 3/2sin cos cos(120) cos(120)si (120) si n 2n(10)s r C θθθθθθ--? ? ? -+? = -? ? -??? ? +?
经典时空观与相对论时空观
经典时空观与相对论时空观 吴绍轩 海洋资源与环境一班 2220133807 【摘要】比较经典时空观与现代时空观的区别,阐述相对论时空观的主要思想。【关键词】时空观、经典时空观、相对论时空观、爱因斯坦、牛顿 一、经典时空观 经典力学认为时间和空间都是绝对的,同一个事件不同状态的人测量情况一样. 经典力学总结了低速物体的运动规律,它反映了牛顿的绝对时空观。绝对时空观认为时间和空间是两个独立的观念,彼此之间没有联系,分别具有绝对性。绝对时空观认为时间与空间的度量与惯性参照系的运动状态无关,同一物体在不同惯性参照系中观察到的运动学量(如坐标、速度)可通过伽利略变换而互相联系。这就是力学相对性原理:一切力学规律在伽利略变换下是不变的。 经典时空理论承认时间和空间的客观存在,牛顿认为时间和空间与物质及其运动无关。时间的坐标系和空间的坐标系是完全脱离物质而独立存在的,时间间隔与空间间隔在不同的惯性系中保持不变,即时间和空间观念与物质运动状态无关且时间和空间彼此无关,各自独立存在。 自十七世纪以来,牛顿力学不断发展并取得了巨大的成就,以牛顿力学为基础建立了天体力学、应用力学等等,从地面上的各种物体的运动,各种现代化交通工具的、及天体的运动,都服从牛顿力学的规律,这些充分说明了牛顿力学规律的正确性。 在十九世纪末,以牛顿力学为基础的经典物理理论,在解释新实验事实时遇到了困难。电磁理论的发展和十九世纪中叶麦克斯韦方程建立后,绝对时空观面临着严峻的局面。按麦克斯韦方程中存在的常数C[4],表明电磁波在真空中沿个方向均以不变的速度C传播,这与伽利略相对性原理发生了矛盾。因为根据绝对时空观的经典速度合成定理,在不同惯性系中,光的传播速度不应在各个方向均相等。似乎只有在某一特殊参考系中麦氏方程才取标准形式,光在各个方向上均以C传播。人们曾引入“以太”假设[3],认为“以太”充满宇宙空间并 绝对静止,光是以“以太”介质中的波动,相应于“以太”的惯性参考系就是那个特殊的参考系。这样,“以太”就充当了“绝对空间”的角色。通过测定物体相对于“以太”的“绝对运动”所引起的“以太风”就可期望找到“以太”。然而,尽管人们赋予“以太”各种各样光怪陆离的性质,仍难自圆其说。且反复实验的结果都是否定的,根本发现不了“以太风”。相反却证明了在任何惯性系中光速都是不变的。1887年的迈克尔孙——莫雷实验可看作否 定“以太”的判决性实验,这使得牛顿绝对时空观遇到了根本性的困难。
坐标变换
坐标变换 由于直流电机的主磁通基本上唯一地由励磁绕组的励磁电流决定,所以这是直流电机的数学模型及其控制系统比较简单的根本原因。 如果能将交流电机的物理模型等效地变换成类似直流电机的模式,分析和控制就可以大大简化。坐标变换正是按照这条思路进行的。 不同电机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。 1.坐标变换原理 交流电机三相对称的静止绕组 A 、B 、C ,通以三相平衡的正弦电流时, 产生的合成磁动势是旋转磁动势F ,它在空间呈正弦分布,以同步转速ωs (即电流的角频率)顺着 A -B -C 的相序旋转。这样的物理模型绘于下图1中。 α 图1交流电机绕组的等效物理模型 图2等效的两相交流电机绕组 旋转磁动势并不一定非要三相不可,除单相以外,二相、三相、四相、…… 等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。 图2中绘出了两相静止绕组 α 和 β它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势 F 。 当图1和 2的两个旋转磁动势大小和转速都相等时,即认为图2的两相绕组与图1的三相绕组等效。 图3旋转的直流绕组 图3两个匝数相等且互相垂直的绕组 d 和 q ,其中分别通以直流电流 id 和i q ,产
生合成磁动势 F ,其位置相对于绕组来说是固定的。如果让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势 F 自然也随之旋转起来,成为旋转磁动势。 把这个旋转磁动势的大小和转速也控制成与图1 和图2中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。 由此可见,以产生同样的旋转磁动势为准则,图1的三相交流绕组、图2的两相交流绕组和图3中整体旋转的直流绕组彼此等效。或者说,在三相坐标系下的 i A 、i B 、i C ,在两相坐标系下的 i α、i β 和在旋转两相坐标系下的直流 i d 、i q 是等效的,它们能产生相同的旋转磁动势。 坐标变换的任务就是求出i A 、i B 、i C 与 i α、i β 和 i d 、i q 之间准确的等效关系。 2.三相--两相变换(3/2变换) 在三相静止绕组A 、B 、C 和两相静止绕组α、β 之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称 3/2 变换。 图4 三相和两相坐标系与绕组磁动势的空间矢量 上图绘出了 A 、B 、C 和 α、β 两个坐标系,为方便起见,取 A 轴和 α 轴重合。设三相绕组每相有效匝数为N 3,两相绕组每相有效匝数为N 2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。由于交流磁动势的大小随时间在变化着,图中磁动势矢量的长度是随意的。 设磁动势波形是正弦分布的,当三相总磁动势与二相总磁动势相等时,两套绕组瞬时磁动势在 α、β 轴上的投影都应相等, ) 2121(60cos 60cos C B A 3C 3B 3A 3α2i i i N i N i N i N i N --=?-?-= )(23 60sin 60sin C B 3C 3B 3β2i i N i N i N i N -= ?-?= 写成矩阵形式,得