维护保养-松下机器人点检指南
松下机器人操作规程

松下机器人操作规程引言概述:松下机器人是一种高效、智能的自动化设备,广泛应用于工业生产线上。
为了确保机器人的安全运行和最大化的效能,制定一套严格的操作规程是必要的。
本文将详细介绍松下机器人操作规程的五个部分,包括机器人的启动与关闭、安全操作、程序调试、故障排除和保养维护。
一、机器人的启动与关闭:1.1 确保机器人周围环境安全:在启动机器人之前,必须确保周围没有任何障碍物,避免机器人在运行过程中与其他物体发生碰撞。
1.2 检查机器人状态:启动机器人之前,要检查机器人的各个部件是否正常工作,如电源是否接通、传感器是否正常等。
1.3 启动与关闭程序:按照松下机器人的操作手册,正确操作启动与关闭程序,确保机器人能够安全启动和关闭,避免意外发生。
二、安全操作:2.1 穿戴个人防护装备:在操作机器人时,操作人员必须穿戴个人防护装备,包括安全帽、防护眼镜、手套等,以确保人身安全。
2.2 遵守操作规程:操作人员必须严格遵守松下机器人的操作规程,不得随意更改机器人的设置或程序,以免引发安全事故。
2.3 注意机器人的工作区域:操作人员在机器人工作区域内工作时,要保持警惕,避免与机器人发生碰撞或被机器人夹伤。
三、程序调试:3.1 确保程序正确:在进行程序调试之前,操作人员要仔细检查程序的逻辑和参数设置,确保程序的正确性和稳定性。
3.2 逐步调试:在进行程序调试时,应该逐步进行,每次只调整一个参数或一小部分程序,以便及时发现问题并进行修复。
3.3 记录调试过程:在进行程序调试时,操作人员应该详细记录调试过程,包括调整的参数、发现的问题以及解决方法,以备后续参考。
四、故障排除:4.1 快速定位故障原因:一旦机器人出现故障,操作人员应该迅速定位故障原因,通过查看报警信息、检查传感器等方式进行排查。
4.2 采取合适的措施:根据故障的具体情况,操作人员应该采取合适的措施进行排除,可以是重启机器人、更换故障部件等。
4.3 记录故障处理过程:在进行故障排除时,操作人员应该详细记录故障处理过程,包括排查的步骤、采取的措施以及最终解决方案,以备日后参考。
机器人操作点检保养标准

关
7 打开程序,设置在慢速状态,观察设备运转是否正常。
机
1 如程序有改动,请注意存盘,参数有改动,也应备份。 2 检查机器人是否已经归位,即起始位置。
操 作
2
关机 操作
3 关闭驱动或伺服电源。 4 关闭系统控制柜主电源。 5 关闭焊机、变压器、水箱、液压站等附属设备。
6 清理设备现场。
装卸 1 使用专用吊具吊装工件,且使用前要对吊具及使用行车进行检查确认。
二 1 工件 2 将机器人变位机运转到可装卸位置。
、
3 正确使用行车,装卸过程中要时刻注意周围环境。
焊 接
2
程序 调整
焊接过程中,与程序有关的位置与参数科根据需要调整,但与程序无关参数禁止修
1改
K
2 程序序调整需要专业人员进行,未经过相应培训人员禁止修改程序。
调 整
设备操作、点检、维护保养指导书
设备名称
焊接机器人
适用机型
修改1
修改2
A.【设备操作作业标准】——操作“应知”“应会”
项目
内容
序号
方法及要点说明
符号
1 查看设备状态及交接班记录,确认设备是否正常,并检查劳保穿戴。
一
2 开启系统控制柜主开关。
、 开
1
开机 操作
3 开启变压器、水箱、焊机、液压站等附属设备。 4 查看机器人各轴是否在起始位置。 5 打开驱动或伺服电源。 6 移动各轴查看是否正常。
每班
各按钮及指示灯功能正常,外观无损坏
操作者/维修 工
15
润滑点 各润滑点加注润滑油
3个月
定期对导轨轴、变位机轴、夹紧装置、 焊机加润滑油与导电油
16 内部灰尘
机器人维护保养的说明书
机器人维护保养的说明书一、引言机器人作为现代工业生产中的重要装备,其维护保养工作对于保证机器人正常运行和延长其使用寿命具有重要意义。
本说明书旨在为用户提供机器人维护保养的相关指导,确保机器人性能始终处于良好状态。
二、保养准备1. 工具准备:根据机器人的型号和特点,准备好所需的维护保养工具,如螺丝刀、扳手、润滑剂等。
2. 环境准备:确保机器人保养的工作环境干燥、整洁,并保持通风良好。
3. 安全准备:在进行机器人维护保养前,确保断开机器人的电源,并采取必要的安全措施,避免意外伤害发生。
三、日常保养1. 外观清洁:定期对机器人进行外观清洁,去除表面的灰尘和污渍。
可以使用干净的软布轻轻擦拭,避免使用含有酸碱成分的清洁剂。
2. 零件检查:定期检查机器人的零部件,特别是紧固件是否松动,如有需要,进行紧固或更换。
3. 电源检查:检查机器人的电源线是否破损或老化,如有问题及时更换,以保证电源的稳定供应。
4. 状态监测:定期运行机器人,观察其运动状态是否正常,如发现异常现象及时处理,并记录下来以供维修参考。
四、润滑维护1. 润滑剂选择:根据机器人的工作条件和要求,选择适合的润滑剂。
常见的润滑剂有机械油、润滑脂等,需要根据机器人的使用手册来选择。
2. 润滑部位:根据机器人的润滑部位,使用适量的润滑剂进行润滑。
特别是机器人关节、传动部分等需要重点关注,并确保润滑剂进入到摩擦部位。
3. 润滑周期:根据机器人的使用频率和工况,制定润滑计划,并按照计划定期进行润滑维护。
五、故障排除1. 故障记录:对机器人的故障进行记录,包括故障发生的时间、现象、原因等信息。
方便维修人员进行问题分析和解决。
2. 常见故障处理:针对机器人常见的故障,提供相应的处理方法。
如电源故障,可以检查电源线和开关;传动故障,可以检查传动部件是否松动等。
3. 专业维修:对于无法自行处理的故障,应及时联系专业的维修人员进行维修,并提供准确的故障信息和现象描述,以便快速解决问题。
机器人维护保养作业指导书
机器人维护保养作业指导书1. 引言本作业指导书旨在为机器人维护保养提供全面的指导,确保机器人的正常运行和延长其使用寿命。
本指导书适用于各类机器人,包括工业机器人、服务机器人等。
在进行维护保养前,请务必阅读本指导书,并按照操作步骤进行操作。
2. 维护保养计划为了确保机器人的稳定性和可靠性,建议制定一个定期的维护保养计划。
根据不同机器人的使用情况和工作环境,可以灵活调整维护周期。
2.1 日常巡检每天对机器人进行一次简单的巡检,包括: - 检查各部件是否存在松动或异常磨损。
- 清理机器人表面的灰尘和污垢。
- 检查电源线是否接触良好。
- 检查传感器是否正常工作。
2.2 定期检查每月对机器人进行一次详细的检查,包括: - 检查电池状态并清洁电池接口。
- 检查电机、减速器和传动装置是否需要润滑。
- 检查机器人的运动轨迹是否正常。
- 检查并清洁传感器。
2.3 年度维护每年对机器人进行一次全面的维护,包括: - 清洁机器人内部,并检查电路板和连接线路是否良好。
- 检查关键部件的磨损情况,如替换磨损的零件。
- 进行校准和调整,确保机器人的准确性和精度。
3. 维护保养操作步骤3.1 关闭机器人在进行任何维护保养操作之前,务必先关闭机器人并断开电源。
确保安全操作。
3.2 清洁表面使用柔软的布或刷子清洁机器人表面的灰尘和污垢。
避免使用含有酸性或碱性成分的清洁剂,以免对机器人造成损害。
3.3 润滑关键部件根据制造商提供的润滑要求,在适当位置添加适量润滑剂。
注意不要过度润滑,以免影响机器人运行。
3.4 校准和调整根据机器人的使用情况和需要,进行校准和调整。
这可能涉及到传感器的校准、运动轨迹的调整等操作。
请参考机器人的用户手册或制造商提供的指导。
3.5 更换磨损零件检查关键部件的磨损情况,如电池、电机、传动装置等,如果发现磨损严重或不正常,及时更换零件。
请使用原厂配件或经过认证的配件。
3.6 清洁内部小心打开机器人外壳,并清洁内部。
松下机器人点检指南G2
松下机器人点检指南G2在现代工业生产中,机器人的应用越来越广泛。
松下机器人以其出色的性能和稳定性,在众多领域发挥着重要作用。
为了确保机器人的正常运行,延长其使用寿命,提高生产效率,定期的点检是必不可少的。
本指南将详细介绍松下机器人的点检要点和方法,帮助您更好地维护和管理机器人设备。
一、点检前的准备工作在进行点检之前,需要做好以下准备工作:1、熟悉机器人的操作手册和技术规格仔细阅读松下机器人的操作手册和技术规格,了解机器人的结构、功能、性能参数以及安全注意事项等。
这将为后续的点检工作提供重要的参考依据。
2、准备必要的工具和设备根据点检的内容和要求,准备好相应的工具和设备,如扳手、螺丝刀、万用表、示波器、清洁工具等。
确保工具和设备的完好性和准确性。
3、确保工作环境安全在点检机器人之前,要确保工作环境安全,清除周围的障碍物和杂物,设置好警示标识,防止无关人员进入工作区域。
同时,要确保机器人处于断电状态,并采取可靠的制动措施,防止机器人意外移动。
二、外观检查首先,对松下机器人的外观进行检查。
1、查看机器人本体是否有明显的损伤、变形或腐蚀检查机器人的外壳、手臂、关节等部位,看是否有碰撞、划伤、裂缝、锈迹等情况。
如果发现有损伤,要及时记录并评估其对机器人性能的影响。
2、检查电缆和管路是否完好检查机器人连接的电缆和管路,看是否有磨损、断裂、松动、泄漏等现象。
特别是电缆的接头部位,要确保连接牢固,无接触不良的情况。
3、检查机器人的标识和铭牌是否清晰完整确认机器人的型号、序列号、生产日期等标识和铭牌清晰可见,以便于追溯和管理。
三、机械部件点检机械部件是机器人正常运行的关键,需要重点关注以下方面:1、关节和轴的检查手动转动机器人的各个关节和轴,感受其转动是否灵活,有无卡顿、异响或异常阻力。
检查关节的润滑情况,如发现润滑不足,应及时添加适量的润滑油。
2、传动部件的检查检查机器人的皮带、链条、齿轮等传动部件,看是否有松动、磨损、断裂等情况。
机器人点检保养日常安全检查
机器人点检保养日常安全检查设备正常的安全机构是保证人身安全的前提,安全机构检查应纳入日常点检范围内,机器人安全使用要遵循以下原则:不随意短接、不随意改造、不随意拆除、操作的规范。
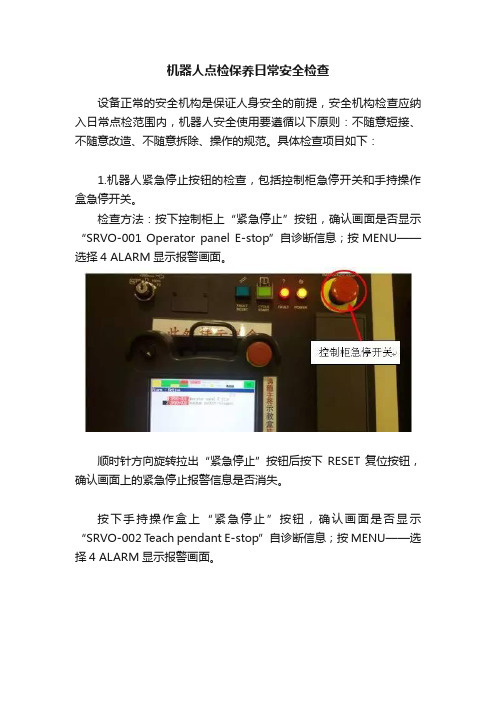
具体检查项目如下:1.机器人紧急停止按钮的检查,包括控制柜急停开关和手持操作盒急停开关。
检查方法:按下控制柜上“紧急停止”按钮,确认画面是否显示“SRVO-001 Operator panel E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
按下手持操作盒上“紧急停止”按钮,确认画面是否显示“SRVO-002 Teach pendant E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
2.安全门及门开关的检查。
检查方法:机器人处于停止状态、控制柜模式开关处于AUTO位置、机器人没有显示任何报警信息。
拉开安全门,确认画面是否显示“SRVO-004 Fence open”自诊断信息;按MENU——选择4 ALARM显示报警画面。
关上安全门后按下系统复位按钮,确认画面上的门开关报警信息是否消失。
3.外部紧急停止开关的检查。
检查方法:机器人处于停止状态下、机器人没有显示任何报警信息,按下外部急停按钮;确认画面是否显示“SRVO-007 External E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
备注:R-30IB系列控制器安全信号全为双链规格,R-3IB MATE、R-30IA MATE、R-30IB、R-30IB MATE控制柜的安全门和外部急停信号连接于机器人控制器内E-stop板上,R-J3IB和R-30IA(R-J3IC)控制柜的安全门和外部急停信号连接于机器人控制内PANEL BOARD (配电盘)上。
机器人维护保养特别提示
案例分析十五
谨慎驾驶!
20
个别机 器人有严重 撞击过的痕 迹,建议用 户加强对现 场操作工人 的安全教育 及机器人正 确使用方法 的教育。
案例分析十六
脏!
21
控制箱内 部情况,粉 尘非常多!
案例分析十七
很脏!!
22
控制箱内部的 粉尘!!
案例分析十八
控制箱内部粉尘!
非常脏!
23
案例分析十九
伺服放大器!!
2
日常检查(闭合电源前)
部件
项目
维修
备注
接地电缆/ 其他电缆
机器人本体
松动、断 开或损害
是否沾有 飞溅和灰 尘
松动
再拧紧。更换
清除飞溅和灰 请勿用压缩空气清理灰
尘
尘或飞溅,否则异物可
能进入护盖内部,对本
体造成损害。
再拧紧
安全护栏 损坏
维修
作业现场 是否整洁 清理现场
3
日常检查(闭合电源后)
部件 紧理!
13
粉尘 堆积现象 严重,容 易造成短 路,烧毁 送丝机及 本体内配
线!
案例分析九
太多了!!
14
很多 的焊接 飞溅及 粉尘!
案例分析十
后果很严重!
机器人 的送丝机处 的烧坏,塑 料板绝缘螺 丝已经烧坏。 需要马上更 换绝缘螺丝、 绝缘板和塑 料板!
15
案例分析十一
案例分析四
丝怎么出?
9
大多数的送丝桶 的桶盖损坏或没有桶 盖,焊丝直接从桶里 拽出来。产生的严重 后果有:①焊丝划伤 ②送丝不流畅③划伤 的焊丝在通过送丝轮 和送丝管时,由于送 丝不流畅,焊丝镀层 会脱落堵塞送丝回路。 导致焊接不稳,同时 也影响送丝管及送丝 轮的使用寿命!
机器人维护保养指导书
机器人维护保养指导书一、前言在现代工业生产和服务领域,机器人的应用越来越广泛。
为了确保机器人能够长期稳定、高效地运行,延长其使用寿命,降低故障发生率,正确的维护保养至关重要。
本指导书将为您详细介绍机器人维护保养的相关知识和操作方法。
二、机器人维护保养的重要性机器人作为一种高精度、高复杂度的设备,长期运行后会出现零部件磨损、老化、精度下降等问题。
如果不进行定期维护保养,可能会导致机器人性能下降、故障频发,甚至影响生产进度和产品质量。
此外,及时的维护保养还可以提前发现潜在问题,降低维修成本,提高机器人的投资回报率。
三、维护保养前的准备工作1、熟悉机器人的技术资料在进行维护保养之前,维护人员应仔细阅读机器人的操作手册、维护手册等技术资料,了解机器人的结构、性能、工作原理和维护要求。
2、准备必要的工具和设备根据维护保养的任务,准备好相应的工具和设备,如扳手、螺丝刀、清洁剂、润滑油、测试仪器等。
同时,确保工具和设备的完好和精度。
3、安全措施维护保养工作必须在机器人停止运行、断电并采取安全防护措施的情况下进行。
维护人员应佩戴必要的个人防护装备,如安全帽、安全鞋、手套等。
四、日常维护保养内容1、外观检查每天开机前,对机器人的外观进行检查,包括机器人本体、电缆、连接器等,查看是否有损伤、变形、松动等情况。
2、清洁工作定期清洁机器人本体、控制柜、传感器等部件,清除灰尘、油污和杂物,保持设备的清洁和良好的散热条件。
3、电缆和连接器检查检查电缆和连接器是否完好,有无破损、松动、接触不良等现象。
如有问题,应及时更换或修复。
4、示教器检查检查示教器的按键、显示屏是否正常,操作是否灵敏。
同时,清洁示教器的表面。
5、电池检查定期检查机器人本体和控制柜中的电池电量,如电量不足应及时更换。
五、定期维护保养内容1、机械部件维护(1)关节润滑根据机器人的使用频率和工作环境,定期对关节部位进行润滑,以减少磨损和摩擦。
(2)传动部件检查检查齿轮、齿条、丝杠、皮带等传动部件的磨损情况,如有异常应及时更换。
松下机器人维护保养
第 1 章. 维护、保养手册定期的维护与检查是机器人正常运转所必需的,同时也确保作业时设备与人员的安全。
(1) 每日检查。
(2) 每500小时(每3个月)检查。
(3) 每2000小时(每1年)检查。
(4) 每4000小时(每2年)检查。
(5) 每6000小时(每3年)检查。
(6) 每8000小时(每4年)检查。
(7) 每10000小时(每5年)检查。
•检查间隔根据标准操作小时来设定,实际施行时请按小时或年月较短的一方来进行。
•在双工作台的系统中,正常情况下应每1.5个月进行一次500小时检查。
•检查时间为控制柜处于闭合状态下的时间。
•进行每2000小时检查时,建议用户施行全面检查(包括我们所规定的检查项目在内)。
•如果您已经与我公司签订了检查合同,我们将按2000小时(每1年)的间隔进行检查。
闭合电源前需要检查的项目闭合电源后需要检查的项目•如果与我们签订了合同,我们将进行2000-小时(每年)检查。
•检查时更换零件收费。
第 2 章. Maintenance and inspection manualMaintenance and inspection are inevitable toensure full functions and performance of therobot and at the same time to ensure safetyduring operation.(1) Daily inspections(2) Inspections every 500 hours (every 3month)(3) Inspections every 2,000 hours (every year)(4) Inspections every 4,000 hours (every 2year)(5) Inspections every 6,000 hours (every 3year)(6) Inspections every 8,000 hours (every 4year)(7) Inspections every 10,000 hours (every 5year)•Since the inspection intervals are setaccording to standard operation hours, applyeither months or hours whichever is shorteras the standard.•In case of operation on two shifts, the every500-hour inspection shall normally beperformed every 1.5 months.•Hours correspond to time while thecontroller is in ON state.•It is recommended to have the overallinspection including overhauls specified byus at the time of every 2000-hour inspection.•If you enter into a periodical inspectioncontract with our company, our periodicalinspections will start with a 2000-hour(yearly) inspection.2-1. Daily checkInspections before turning on the powerInspections after turning on the power2-2. Periodical check•If you have a periodical inspection contract with our company, our periodical inspections will start with a 2000-hour (yearly) inspection.•Replacement of parts found to be replaced at the inspection will be charged.。
机器人维护保养指南
维护保养指南维护保养指南1.简介1.1 目的1.2 适用范围1.3 定义2.维护计划2.1 维护周期2.2 维护任务清单2.3 维护人员安排3.日常维护3.1 清洁外观3.2 检查并更换零件3.3 校准传感器3.4 检查连接线路3.5 检查并更换电池4.故障排除与修复4.1 故障分类与问题排查 4.2 故障排查流程4.3 常见故障及解决方法5.升级与更新5.1 软件升级过程5.2 硬件升级注意事项5.3 数据备份与还原6.安全与保护6.1 安全操作要点6.2 防护措施6.3 紧急停机与应急处理7.附件- 附件1:维护清单- 附件2:故障排查表- 附件3:升级记录表注释:1.:指公司所使用的自动化装置。
2.维护周期:的定期维护时间间隔。
3.维护任务清单:详细列出维护所需的任务及频率。
4.维护人员安排:指派人员负责的维护工作。
5.清洁外观:包括清理表面、移除杂物等。
6.检查并更换零件:检查零件磨损程度,需要更换时进行更换。
7.校准传感器:校准传感器的灵敏度和准确性。
8.检查连接线路:检查连接线路的连接情况,确保正常。
9.检查并更换电池:检查电池电量及寿命,需要更换时进行更换。
10.故障分类与问题排查:将故障按照类型分类,并进行问题排查。
11.故障排查流程:按照特定流程进行故障的排查和修复。
12.软件升级过程:完成软件升级的步骤和注意事项。
13.硬件升级注意事项:完成硬件升级的说明和注意事项。
14.数据备份与还原:对的数据进行备份和还原的操作。
15.安全操作要点:操作时需要注意的安全要点。
16.防护措施:为提供必要的防护措施以保护其安全。
17.紧急停机与应急处理:发生紧急情况时的停机和应急处理措施。
附件:附件1:维护清单附件2:故障排查表附件3:升级记录表本文档涉及附件,请参考相应附件内容。
本文所涉及的法律名词及注释:1.(Robot):根据预设程序,能够实现一定动作和工作功能的自动化装置,具备感知、思考、决策和执行的能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
3.焊枪(焊枪本体)部
No
内
容
19 确认有无飞溅及灰尘附着
20 确认外观有无损伤
21 确认并清扫绝缘处 22 松紧的确认、紧固
确认方法
对策
(1) 清扫。
(1) 清扫。
(1) 确认焊枪、焊枪本体外观有无损伤,有时要应急处理, (1) 目测外观有无损伤,进行紧急处理,必要时
严重时要更换零件。
进行更换。
有时应紧急处理,损坏严重时应进行更换。
换。
4 接地地线
(1) 确认本体与控制装置间的接地线。 (2) 确认外部轴与控制装置间的接地线。
(1) 目测。 (2) 目测。
2.控制装置(包括示教盒)
No
内
容
确认方法
对策
5 确认外观有无污损
(1) 清扫机器人本体和控制装置。 (2) 确认电缆外观有无损伤,有时应紧急处理,损坏严重时
(1) 确认接线端子的松紧程度。 (2) 确认电缆外观有无损伤,有时应紧急处理,损坏严重时
应进行更换。
(1) (2)
用手确认松紧程度。 目测外观有无损伤,必要时进行紧急处理或更 换。
3 与控制装置相连的电缆
(1) 确认接线端子的松紧程度。
(1) 手确认松紧程度。
(2) 确认电缆(包括示教盒及外部轴电缆)外观有无损伤, (2) 目测外观有无损伤,必要时进行紧急处理或更
(1) 确认并清扫绝缘件与焊枪、焊枪本体的安装部位及绝缘 (1) 清扫各部位,目测绝缘件是否损坏,必要时
件与送丝电机安装部位。
进行更换。
(1) 紧固焊枪安装螺钉及 CC 零件、母材线、地线部位。
(1) 紧固各部位。
4.机器人本体
No
内
容
23 确认外观上有无脏污及损伤
24 确认、紧固机器人本体安装螺钉的松紧
应进行更换。 (3) 确认通风孔是否被堵塞。
(1) (2)
(3)
清扫。 目测外观有无损伤,必要时进行紧急处理或更 换。 目测通风口有无堵塞。
(1) 目测指示灯有无异常。
6
确认示教盒、指示灯等显示有 (1) 常用显示灯类的确认。
(2) 目测指示灯有无异常。
无异常
(2) 面板、示教盒、外部机器、机器人本体的指示灯确认。 (3) 机器人控制柜内部次序 P 板(ZUEP5352)上指
(1) 按照维修手册(2)第 11 页操作。
33 确认本体的电线束
(1) 确认在本体内电线束上黄油情况。
(1) 确在本体内电线束上涂抹黄油。
34
所有轴运转中的异常振动、异常声音的确认
(1) 用示教盒手动操作转动各轴不能有异常振动 和声音。
(1)
有异常振动或声音时进行那些判断和操作?
35 确认所有轴的运转区域
(1)
根据维修手册(3)第 5 页测量 I/O 电压。
(1) 在电机制动器部位确认。 (2) 判定基准: DC90V(+0,-15)
DC24V(+0,-4)
(1) 根据维修手册(3)第 7 页测量 I/O 电压。
18 相对于各 I/O 确认 I/O 功能 (1) 用示教盒确认。
(1) 根据维修手册(6)第 10 页操作。
(1) 两年更换一次。
(1) 按时间更换。
38 检测后现场的运转确认
(1) 检测后需要操作者做现场的运转确认。
(1) 运转机器人,目测机器人各方面是否正常。
5.YD-350GR3 焊接电源
4
No
内
容
39 焊接电源内部是否有脏污的确认
确认方法
(1) 清扫。
40 冷却风扇运转有无异常的确认
(1) 闭合电源,确认冷却风扇运转状态。
12
确认输入/出端子连接电缆的 安装螺钉
(1) 紧固次序板上 I/O 端子的导线。
(1) 紧固螺钉。 (2) 用手确定接线端子连接状态,松动时连接好。 (1) 紧固。
(1) 紧固。
13 磁性开关接点损耗的确认
(1) 确认伺服侧及控制侧的磁性开关的接点处有无损坏。 (1) 确认接点是否损坏,损坏时进行更换。
(1) 清洁。
9
确认所有冷却扇是否运转正 常
(1) 打开控制电源,确认所有风扇运转是否正常,不运转的 予以更换。
(1)
目测,损坏时进行更换。
10
确认 P 板上螺钉、接线端子等 (1) 紧固各 P 板的固定螺钉、螺帽。
是否正常
(2) 确认各接线端子是否连接好。
11
确认放大器端子连接电缆的 安装螺钉
(1) 紧固放大器的输入/出电缆。
示灯各有什么用?
1
7
按异常停止按钮,确认是否正 常
(1) 确认面板异常停止按钮是否正常。 (2) 确认示教盒异常停止按钮是否正常。 (3) 确认外部控制异常停止按钮是否正常。
8
确认印刷电路板、放大器等器 件是否脏污
(1) 清洁。
(1)
(2) (3)
开机后用手按动面板异常停止按钮,确认有无 异常,损坏时进行更换。 同上。 同上。
1.连接电缆(外观确认、拧紧加固)
No
内
容
确认方法
对策
1
确认机器人本体与伺服电机 相连的电缆
(1) 确认接线端子的松紧程度。 (2) 确认电缆外观有无损伤,有时应紧急处理,损坏严重时
应进行更换。
(1) (2)
用手确认松紧程度。 目测外观有无损伤,必要时进行紧急处理或更 换。
2
确认焊机及接口箱相连的电 缆
15
确认伺服放大器的输入/出电 压(AC、DC)
(1) 打开伺服电源,参照各机种服务手册测定伺服放大器的 I/O 电压(AC、DC)。
(2) 判定基准在±15%范围内。
(1)
根据维修手册(3)第 3 页测量 I/O 电压。
16 确认 DC 电源的 I/O 电压 17 确认制动器打开时的电压
(1) 打开伺服电源,参照各机种服务手册测定各 DC 电源的 I/O 电压及各 P 板的输入电压。
41 主变压器接线、安装螺钉松紧的确认
(1) 紧固接线。
42
1 次电缆、2 次电缆接线的安装螺钉松紧的 确认
(1) 紧固接线。
43
磁性开关的接点损耗及接线安装螺钉的松 (1) 确认磁性开关的接点。
紧的确认
(2) 紧固接线。
44 其他部位的接线松紧确认
(1) 紧固各部位接线。
对策
(1) 清扫。 (1) 闭合电源目测风扇运转状态,损坏时进行更
25 伺服电机的安装螺钉的松紧确认、紧固 26 确认同步皮带(牙轮皮带)的伸张状态 27 确认超程开关的运转是否正常
28 确认原点标志的运转是否正常
确认方法
对策
(1) 清扫。
(1) 清扫。
(1) 紧固机器人本体的固定螺钉。 (2) 紧固焊枪本体固定螺钉、母材线、地线部位
部。
(1) (2)
紧固螺钉。 紧固螺钉和各部位。
(1) 用示教盒手动操作使机器人各轴运动,在软 (1) 根据示教盒显示确认各轴运动区域,目测是
限位报警时确认是否达到硬限位。
否达到硬限位。
36 原点复位后所有轴与原来标志一致的确认 (1)运动各轴进行确认。
(1) 用示教盒运动各轴进行确认(目测)。 (2) 原点标志不吻合时重新确认第 28 条。
37 确认锂电池
(1) 原点复位,确认原点标志是否吻合。 (2) 不吻合时,若用户反馈信息,应帮助其示教
修正,使原点标志符合。
(1) (2)
目测原点标志是否吻合。 不吻合时进行怎样的示教操作?
3
29 确认腕部是否松动 30 确认防碰撞传感器的运转是否正常 31 空转确认(刚性损伤)
(1) 确认伺服锁定时腕部有无松动。 (2) 确认在所有运转领域中有无松动。 (3) 松动时要调整锥齿轮。
换。 (1) 紧固。
(1) 紧固。
(1) 确认接点,损坏时进行更换。 (2) 紧固。
(1) 紧固各部位接线。
5
14 确认蓄电池电压
(1) 关闭所有电源,检查 P 板上的存储器挡板上的蓄电池电 压(每 5 年更换)。
(2) 机器人本体内的编码器挡板上的蓄电池电压:所有机种 每两ቤተ መጻሕፍቲ ባይዱ更换。
(1) (2)
机器人控制柜断电时,将新电池换上,然后将 机器人控制柜加电。 以上方法必须在电池电压人正常时使用。当电 池没电,机器人遥控盒显示编码器复位时,需 要按照机器人服务手册(1)上的方法操作。
(1) 如何确认腕部松动程度? (2) 松动时如何调整锥齿轮?
(1) 闭合电源开关及伺服电源,使防碰撞传感器 (1) 闭合电源开关及伺服电源,拨动焊枪确认传
运转,确认紧急停止功能是否正常。
感器是否正常。损坏时进行更换。
(1) 运动各轴进行确认。
(1) 如何确认刚性损伤?
32 确认谐波减速器润滑油
(1) 原则三年以上为一周期。
(1) 所有轴电机安装螺钉的紧固。
(1) 安装螺钉的紧固力矩是多少?
(1) 扩张程度松时,进行调整。 (2) 损伤、磨损严重时要更换。
(1) 如何确认皮带松紧程度?如何进行调整? (2) 如何确定皮带的损伤程度?
(1) 闭合电源开关(伺服电源关断),打开各轴的超 程开关进行确认。
(1)
机器人本体上有几个超程开关?