松下机器人基本操作上课讲义
松下机器人操作手册
或者
登录
②窗口显示事例(焊接开始点) ※19
※18
空走
※19
③窗口显示事例(焊接中间点) ※20
焊接
※20
④窗口显示事例(焊接结束点) ※21
P10
焊接
※21
空走
7.退出当前示教模式
1)按下 窗口切换 键 2)打开[文件]菜单 3)选择 文件保存 选项
※22 ※23 ※24
※22
窗口切换
※23
+
文件
安全开关按下过轻 [力度适中]
伺服电源打开 <可以打开>
安全开关按下力量过大 伺服电源关闭
[力度过大]
<不能打开>
※1 ※2
※3
伺服打开
2 打开 机器人运转 图标 3.选择坐标系
※2 ※3
按下 右转换键 后,可以使用 键切换坐标
关闭
打开
关节
切换
直角
切换
工具
切换
圆柱
用户
(需要使用扩张机能设定)
+
右转换键
①
①②两种操作均可
②
+
持续按下
+ +
前进键
※6向后跟踪
①
+
未到达示教点 到达示教点
持续按下
・向前跟踪到1以外的其它示教点
②
- +
后退键
.
未到达 到达
P13
B.从所选择的程序跟踪修正
1.将模式选择开关打到 示教 一侧 ※1
※1
2.打开 文件 菜单
※2
3.在 文件 菜单上选择 [打开] 选项 ※3 4.选择「程序」或「最近打开过的文件」
1)打开 MORE 菜单
※1
2)选择 扩张设定
松下机器人基本操作参考资料

Panasonic(中国)焊接学校
对中用 基准点
对枪尺
【以往的方式】
【焊枪对中功能】
11
Panasonic(中国)焊接学校
2、机器人的动作
12
机器人工作原理
Panasonic(中国)焊接学校
机器人的工作原理是:“示教-再现”。“示教”就是 机器人学习的过程,在这个过程中,操作者需手把手的 教机器人做某些动作,而机器人的控制系统会以程序的 方式记忆下来。机器人按照记录下来的程序展现这些动 作的过程,叫做“再现”。
人造人=机器人 Robot
机器人的性质
机器人是具有生物功能的空间三维坐标机器
3
Panasonic(中国)焊接学校
Panasonic 机器人的历史
1980年 松下弧焊机器人投放上市
模拟 『连接』
1993年 推出电源一体型数字结合机器人
AW400 AW500 AW550
AW660
AW1000 AW2000
VR006GD
VR008 VR004 VR006L
VR系列
一个大脑 『融合』
TA1400GX TA1400GXP
TM1000
TA1000 TA1400
TA1600 TA1800 TA1900
TM1400
TA1000WG TA1400WG
TA1600WG TA1800WG
TA/TM系列
4
Panasonic(中国)焊接学校
9
GⅢ型控制器主要规格参数
Panasonic(中国)焊接学校
1、标准容量40000点(可扩容) 2、同时控制6轴(最多27轴) 3、间接风冷(内部循环方式) 4、TP:SD卡插槽×1; USB×2 5、示教器质量约0.98kg(不 含电缆,业内最轻) 6、控制箱质量60kg
松下机器人示教编程详解入门篇
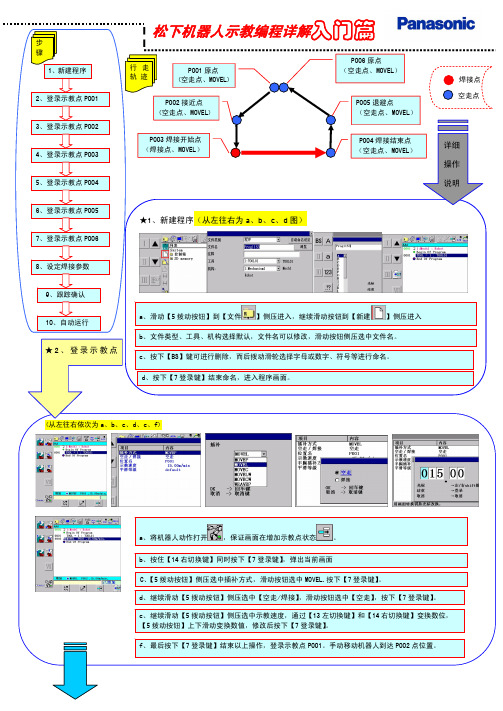
a、滑动【5拨动按钮】到【文件】侧压进入,继续滑动按钮到【新建】侧压进入
b、文件类型、工具、机构选择默认,文件名可以修改,滑动按钮侧压选中文件名。
c、按下【BS】键可进行删除,而后拨动滑轮选择字母或数字、符号等进行命名。
a、将机器人动作打开,保证画面在增加示教点状态。
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、用上述方法对【插补方式】和【空走/焊接】进行选择,并最终按下【7登录键】登录示教点P002。
手动移动机器人到达P003点位置。
★4、登录P003
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、重复以上操作,但这一点应选择【焊接点】,按下【7登录键】登录示教点P003。
手动移动机器到达P004点位置。
★5、登录示教a、关闭机器人动作
将光标移动到P001点,按下复制键
,
点,按下粘贴键
★8、设定焊接参数:d、将光标移动到【ARC-SET】一列侧压滑轮选中。
e、对参数进行设定,侧击滑轮修改数值。
★9、跟踪确认;将光标移到【Begin】一列,把机器人动作打开,选
中跟踪键,加伺服按住【MOVE+】,侧压推动滑轮进行跟踪,跟踪为逐
F3(从左往右依次为a、b 图)
(从左往右依次为a、b 图)
a、b、c、d、e 图)
(从左往右依次为9、10图)
点P002。
松下机器人操作手册
R-Shift Key L-Shift Key 3Point Deadman Switch (Deadman Switch) +key(Plus key) -key(Minus key)
P2
安全开关
示意图
2.如何正确使用示教器 (将示教器电缆缠绕在胳膊上,使示教器拿的平稳、安全)
设定
控制器
・在设定窗口 |
输入用户ID
「robot」(英文小写字母)
(允许使用浏览功能)
・在设定窗口 |
输入登录密
码「0000」(数字)。
◎标准设定 (系统管理员级)
用户ID
robot
用户登录密码
0000
当输入错误需要修正时,可以使用BS清除+
・B2以后的版本 【允许使用自动登录功能】 设定 → 管理工具 → 用户管理→
1)打开 MORE 菜单
※1
2)选择 扩张设定
※5
a.焊接区间转换
b.示教中使用焊丝接触监测功能
c.使用转换缓冲器
d.程序测试功能
e.跟踪设定
取消
※5
扩张设定
P12
④文件(程序)的检查・修正操作
A.当前示教程序的跟踪修正
※1
1.选择机器人运动OFF ※1
功能键
ON(灯亮)
OFF(灯灭)
2.移动指针到[程序窗口]的指定行程序上 ※2
①
①②两种操作均可
②
+
持续按下
+ +
前进键
※6向后跟踪
①
+
未到达示教点 到达示教点
持续按下
・向前跟踪到1以外的其它示教点
松下机器人操作说明

产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
松下机器人操作说明
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
松下焊接机器人电子教案PPT课件
CHENLI
13
第二章 机器人示教器(4)
(辅图)机器人的分级管理功能
CHENLI
14
第二章 机器人示教器(3)
向上/向下微动来移动光标
点击拨动按钮 显示子菜单项目
EXI T
点击拨动
EXI T
按钮关闭子
菜单项目
点击图 标显示图 标的子菜 单项目
教材(图2-17)选择菜单
大约 0.2 s 大约 0.5 s
教材(图10-12)二进制方式时序图
CHENLI
40
第十章 输入/输出设定(7)
运转输出 启动输入
启动操作
程序预约 XXX 程序预约 YYY 输入选通
Prog0ZZZ.prg 被 选 择 0.2 s 以 上
P ro g 0 Y Y Y.p rg 被 选 择
预约输出 XXX 预约输出 YYY
CHENLI
57
几第种插十补七方章式: 机器人编程的几种插补方式
示教点的插补 PTP(MOVEP)
点到点的运动
1、直线插补 Linear(MOVEL) 机器人从该点到下一点运行一段线 段。
E 1
S
2
教材(图3-22)六种摆动形式组图
CHENLI
22
第三章 手动模式(7)
程序开始 焊接开始点 焊接结束点 程序结束
教材(图3-35)设定焊接条件
CHENLI
23
第三章 手动模式(8)
关节 直角 工具 圆柱 用户
教材(图3-9)机器人运动坐标系选择菜单组图
关节坐标系的切换
CHENLI
24
(确认、窗口切换与删除键) User function
松下机器人基本操作讲义
向高智能化发展,彻底改变人类的生活方式
焊枪 机器人本体
Hale Waihona Puke Panasonic(中国)焊接学校
送丝装置
机器人控制箱
机器人示教器
FG焊接机器人部品图
机器人焊接电源
RW轴:手臂(扭转) FA轴:肩(转动)
Panasonic(中国)焊接学校
BW轴:手腕(扭转) TW轴:手腕(转动)
RT轴:腰(扭转)
UA轴:躯体(前后)
机器人:6个自由度
TM 机器人本体各轴介绍
Panasonic(中国)焊接学校
BW轴:手腕(扭转)
RW轴:手臂(扭转)
TW轴:手腕(转动)
FA轴:肩(转动)
UA轴:躯体(前后) RT轴:腰(扭转)
机器人:6个自由度
人:7个自由度
TA机器人本体各轴与人的比较
TM1400机器人本体主要规格参数
Panasonic(中国)焊接学校
(十) 结束操作后,将模式开关的钥匙旋转到“Teach”側,关闭 除尘器设备,旋闭保护气瓶上的气阀,放空气管内的残余气体,将机 器人归为零位,退出示教程序,然后按要求关闭电源,把示教器的控 制电缆线盘整放好,将示教器挂在指定的位置,整理完现场后离开。
Panasonic(中国)焊接学校
AW6000
AW系列
数字 『结合』
2004年 电源融合型 TAWERS 机器人问世
AW006 AW005C
AW005CL VR006C
VR006GX VR006GXP
AW010 AW005AL
VR006GD
VR008 VR004 VR006L
VR系列
一个大脑 『融合』
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Panasonic(中国)焊接学校
(十) 结束操作后,将模式开关的钥匙旋转到“Teach”側,关闭除 尘器设备,旋闭保护气瓶上的气阀,放空气管内的残余气体,将机器 人归为零位,退出示教程序,然后按要求关闭电源,把示教器的控制 电缆线盘整放好,将示教器挂在指定的位置,整理完现场后离开。
人造人=机器人 Robot
机器人的性质
机器人是具有生物功能的空间三维坐标机器
Panasonic(中国)焊接学校
Panasonic 机器人的历史
1980年 松下弧焊机器人投放上市
模拟 『连接』
1993年 推出电源一体型数字结合机器人
AW400 AW500 AW550
AW660
AW1000 AW2000
(六)机器人从操作者安全角度考虑预先设定好一些运行数据和 程序,初学者未经许可不要进入这些菜单进行更改,以免发生危 险操作中如遇到异常提示应及时报告,不要盲目操作。
(七)机器人动作中如遇危险状况时,应及时按下紧急制动开关, 使机器人停止,以免造成人员伤害或物品的损坏
Panasonic(中国)焊接学校
在实际工作中,通常需要将示教程序试运行,并进 行修改、调整,才能得到有效的工作程序。
Panasonic(中国)焊接学校
Panasonic(中国)焊接学校
1-启动按钮;2-暂停按钮;3-伺服ON按钮;4-紧急停止按钮; 5-+/-键;6-拨动按钮;7-登录键;8-窗口切换键;9-取消键; 10-用户功能键;11-模式切换开关;12-动作功能键
1、 焊接机器人的主要作用?
代替人,从事繁复、危险的工作
2、 焊接机器人的特点?
效率高、质量好、计划性强 消除人工劳动的不确定因素 易于实现流水化作业
3、 焊接机器人的发展趋势?
向高智能化发展,彻底改变人类的生活方式
焊枪 机器人本体
Panasonic(中国)焊接学校
送丝装置
机器人控制箱
机器人示教器
Panasonic(中国)焊接学校
对中用 基准点
对枪尺
【以往的方式】
【焊枪对中功能】
Panasonic(中国)焊接学校
2、机器人的动作
机器人工作原理
Panasonic(中国)焊接学校
机器人的工作原理是:“示教-再现”。“示教”就是 机器人学习的过程,在这个过程中,操作者需手把手的 教机器人做某些动作,而机器人的控制系统会以程序的 方式记忆下来。机器人按照记录下来的程序展现这些动 作的过程,叫做“再现”。
GⅢ型控制器主要规格参数
Panasonic(中国)焊接学校
1、标准容量40000点(可扩容) 2、同时控制6轴(最多27轴) 3、间接风冷(内部循环方式) 4、TP:SD卡插槽×1; USB×2 5、示教器质量约0.98kg(不 含电缆,业内最轻) 6、控制箱质量60kg
TM机器人特点介绍4
焊枪对中功能
【TCP调整简单・高精度化】
这是采用设置在了机器人上的基准点,对焊 枪进行对中的新功能。 使用焊枪对中功能把机器人移动到指定位置 后,采用安全支架的调整机构,将焊枪枪尖 对准基准点,没有对枪尺即可进行工具补偿。 在机器手的局部上设置基准点,甚至比使用 对枪尺时的设定精度还要高。 TCP : 工具中心点(Tool Center Point)
AW3000 AW4000 AW5000 AW5000N AW7000 AW8010 AW8010N AW8006
AW6000
AW系列
数字 『结合』
2004年 电源融合型 TAWERS 机器人问世
AW006 AW005C
AW005CL VR006C
VR006GX VR006GXP
AW010 AW005AL
TW轴:手腕(转动)
FA轴:肩(转动)
UA轴:躯体(前后) RT轴:腰(扭转)
机器人:6个自由度
人:7个自由度
TA机器人本体各轴与人的比较
TM1400机器人本体主要规格参数
标准型
Panasonic(中国)焊接学校
1、结构:6轴独立多关节型 2、手腕负载:6kg 3、重复定位精度:±0.08mm 4、最远到达距离:1437mm 5、总功率:3400w 6、安装姿态:普通、天吊 7、质量:约170kg
Panasonic(中国)焊接学校
13-右切换键;14-左切换键;15-安全开关(三段位)
Panasonic(中国)焊接学校
3、机器人的安全
Panasonic(中国)焊接学校
(五)示教过程中要将示教器时刻拿在手上,不要随意乱放,左 手套进挂带里,避免失手掉落。电缆线顺放在不易踩踏的位置, 使用中不要用力拉拽,应留出宽松的长度。
VR006GD
VR008 VR004 VR006L
VR系列
一个大脑 『融合』
TA1400GX TA1400GXP
TM1000Βιβλιοθήκη TA1000 TA1400
TA1600 TA1800 TA1900
TM1400
TA1000WG TA1400WG
TA1600WG TA1800WG
TA/TM系列
Panasonic(中国)焊接学校
FG焊接机器人部品图
机器人焊接电源
RW轴:手臂(扭转) FA轴:肩(转动)
Panasonic(中国)焊接学校
BW轴:手腕(扭转) TW轴:手腕(转动)
RT轴:腰(扭转)
UA轴:躯体(前后)
机器人:6个自由度
TM 机器人本体各轴介绍
Panasonic(中国)焊接学校
BW轴:手腕(扭转)
RW轴:手臂(扭转)
(八)程序编好后,用跟踪操作把程序空走一遍,逐行修改轨迹点, 检查行走轨迹和各种参数准确无误后,旋开保护气瓶的阀门,然后, 按亮示教器上的检气图标,调整流量计的悬浮小球,一般在15L/min 的位置,关闭检气,把光标移至程序的起始点。
(九)进行焊接作业前,先将示教器挂好,钥匙旋转到“Auto”侧, 打开除烟尘设备后,按下机器人启动按钮。观察电弧时,应手持面罩, 避免眼睛裸视或皮肤外露而被弧光灼伤,发现焊接异常应立刻按下停 止按钮,并做好记录。
Panasonic(中国)焊接学校
松下机器人基本操作课程
唐山松下欢迎您!
Panasonic(中国)焊接学校
机器人是什么?
Panasonic(中国)焊接学校
机器人一词的由来
1920年捷克作家卡雷尔·恰佩克在他的科幻 小《罗萨母万能机器人制造公司》首次提到 机器人一词 捷克文中的 robota(劳役或苦工之意)