基于RecurDyn的多体动力学仿真
recurdyn 实例

recurdyn 实例
RecurDyn是一种基于多体动力学理论的仿真软件,主要用于模拟复杂机械系
统的运动和动力学行为。
通过RecurDyn,用户可以对各种机械系统进行仿真分析,包括机械臂、机器人、车辆、飞机等。
下面将介绍一些RecurDyn的实例应用:
1. 机械臂仿真:RecurDyn可以用来模拟各种类型的机械臂,包括工业机器人、医疗机器人等。
通过建立机械臂的模型,并设置各种约束条件和控制参数,可以实现对机械臂的运动学和动力学分析,包括工作空间分析、碰撞检测、运动学逆解等。
2. 汽车悬挂系统仿真:RecurDyn可以用来模拟汽车的悬挂系统,包括悬挂弹簧、减震器、转向系统等。
通过对汽车悬挂系统进行仿真分析,可以评估悬挂系统的性能,优化悬挂系统的设计,提高汽车的行驶稳定性和舒适性。
3. 机械振动分析:RecurDyn可以用来模拟机械系统的振动行为,包括自由振动、受迫振动等。
通过对机械系统的振动进行仿真分析,可以评估机械系统的振动特性,预测振动的影响,优化机械系统的设计。
4. 飞机机翼仿真:RecurDyn可以用来模拟飞机机翼的变形和振动,包括机翼
的弯曲、扭转等。
通过对飞机机翼的仿真分析,可以评估机翼的结构强度,优化机翼的设计,提高飞机的飞行性能。
总的来说,RecurDyn是一款功能强大的多体动力学仿真软件,可以广泛应用
于机械、航空航天、汽车等领域的工程设计和分析中。
通过RecurDyn的实例应用,可以更好地理解和掌握机械系统的运动和动力学行为,为工程设计提供有效的仿真分析工具。
基于RecurDyn的机电一体化仿真
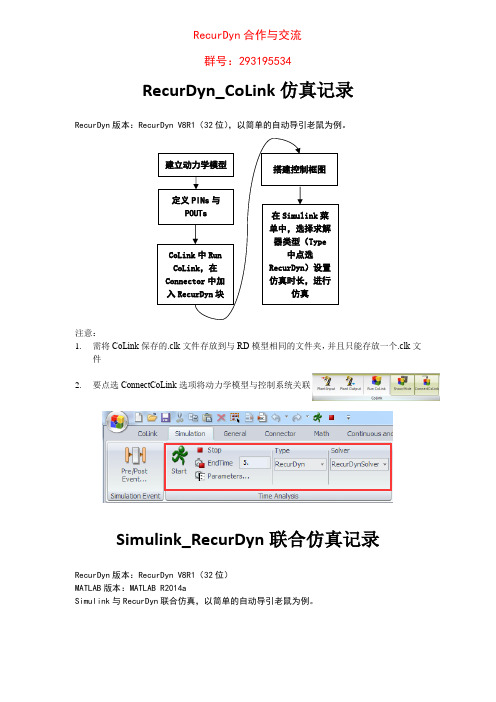
RecurDyn_CoLink仿真记录RecurDyn版本:RecurDyn V8R1(32位),以简单的自动导引老鼠为例。
注意:1.需将CoLink保存的.clk文件存放到与RD模型相同的文件夹,并且只能存放一个.clk文件2.要点选ConnectCoLink选项将动力学模型与控制系统关联Simulink_RecurDyn联合仿真记录RecurDyn版本:RecurDyn V8R1(32位)MATLAB版本:MATLAB R2014aSimulink与RecurDyn联合仿真,以简单的自动导引老鼠为例。
RecurDyn合作与交流群号:293195534采用1.0的接口在MATLAB中产生报错:采用2.0的接口未发生报错。
注意:3.需将MATLAB工作路径设置为存放RD模型与导出关联的.M文件的文件夹4.联合仿真时需将RD模型关闭,否则无法仿真5.仿真时RD模型演示一次后自动关闭步骤:1.建立多体动力学模型,保证其正常工作,保存到当前路径2.建立动力学模型输入变量PINs与输出变量POUTs3.建立RecurDyn与MATLAB关联的.M文件,export到当前路径,如图4.启动MA TLAB,将MA TLAB工作路径设置为存放RD模型与导出关联的.M文件的文件夹,即当前路径5.Run关联.M,工作区显示相关信息6.命令窗口输入rdlib或makerd,弹出包含RD的Plant Block的Simulink model,在里面搭建控制框图,保存在当前路径,注意:保存格式必须是.mdl而不是.slx,否则后期无法读取文件,最后关闭MATLAB程序即可7.如图依次进行:设置MATLAB的安装目录,一般是…bin\win32\MATLAB.exe或…bin \MA TLAB.exe 导出run Simulink Model的.M文件到当前路径,注意名字不要与关联.M文件名字一致Simulink Model选择第6步导出的.mdl文件,OK退出8.切换到模型Analysis界面,进行Dyn/Kin仿真,将看到MA TLAB启动,运行,关闭,同时模型进行动画演示9.切换到Plot模块进行绘图37RecurDyn_CoLink_Simulink联合仿真记录RecurDyn版本:RecurDyn V8R1(32位),以简单的自动导引老鼠为例。
recurdyn基本算法

recurdyn基本算法
RecurDyn是一种基于多体动力学的仿真软件,广泛应用于机械工程、航空航天、汽车工程、船舶工程等领域。
本文主要介绍RecurDyn 的基本算法。
1. 多体动力学模型
RecurDyn的核心是多体动力学模型,包括质量、速度、位置、加速度等物理量。
模型的基本假设是物体之间存在相互作用力,根据牛顿定律,物体的加速度与作用力成正比,与物体的质量成反比。
2. 时空离散化
为了对物体的运动进行仿真,需要将时间和空间离散化,即将连续的时间和空间转化为离散的时间和空间。
在RecurDyn中,时间和空间离散化采用了显式欧拉法或隐式欧拉法。
3. 接触检测
接触是多体动力学模型中重要的问题,需要检测物体之间是否接触,并计算接触力。
RecurDyn采用了快速多极子方法或广义平面算法进行接触检测。
4. 接触力计算
在接触检测之后,需要计算接触力。
RecurDyn采用了Hertz接触理论或Coulomb接触模型进行接触力计算。
5. 约束条件
在多体动力学模型中,物体之间存在约束条件,如接触约束、几何约束、运动约束等。
RecurDyn采用了拉格朗日乘子法或笛卡尔-拉
格朗日方法进行约束条件的处理。
以上是RecurDyn的基本算法,通过对这些算法的深入了解和应用,可以更好地进行物体的运动仿真和分析。
关于recurdyn柔体碰撞接触参数大小的文章
关于recurdyn柔体碰撞接触参数大小的文章Rercydyn柔体碰撞接触参数大小的影响在工程设计和仿真中,碰撞接触是一个重要的考虑因素。
它涉及到物体之间的相互作用和力的传递。
Recurdyn是一种常用的多体动力学仿真软件,它可以模拟柔性物体之间的碰撞接触。
在Recurdyn中,有一些参数可以调整来控制碰撞接触的行为,其中包括接触刚度、阻尼系数和摩擦系数等。
首先,接触刚度是一个重要的参数。
它决定了物体在碰撞过程中的弹性变形程度。
较高的接触刚度会导致较小的变形,而较低的接触刚度会导致较大的变形。
这个参数对于模拟柔性物体之间的碰撞非常关键,因为柔性物体具有较大的变形能力。
通过调整接触刚度,我们可以控制模拟结果中物体之间碰撞后产生的变形程度。
其次,阻尼系数也是一个重要参数。
它决定了碰撞过程中能量损失的大小。
较高的阻尼系数会导致较大的能量损失,而较低的阻尼系数会导致较小的能量损失。
在柔体碰撞中,能量损失是不可避免的,因为柔性物体具有一定的能量吸收能力。
通过调整阻尼系数,我们可以控制模拟结果中碰撞过程中的能量损失程度。
最后,摩擦系数也是一个需要考虑的参数。
它决定了物体之间相对滑动的程度。
较高的摩擦系数会导致较大的相对滑动,而较低的摩擦系数会导致较小的相对滑动。
在柔体碰撞中,摩擦力是一个重要因素,它可以影响物体之间接触面上的力传递和运动状态。
通过调整摩擦系数,我们可以控制模拟结果中碰撞过程中物体之间相对滑动的程度。
综上所述,Recurdyn柔体碰撞接触参数大小对于模拟结果具有重要影响。
通过调整接触刚度、阻尼系数和摩擦系数等参数,我们可以控制模拟结果中物体之间碰撞后产生的变形程度、能量损失程度和相对滑动程度。
这些参数的选择需要根据具体的工程需求和物体特性进行调整,以获得准确和可靠的仿真结果。
因此,在使用Recurdyn进行柔体碰撞仿真时,我们应该充分理解和合理调整这些参数,以确保模拟结果与实际情况相符合。
基于RecurDyn的滚珠直线导轨副动力学仿真研究
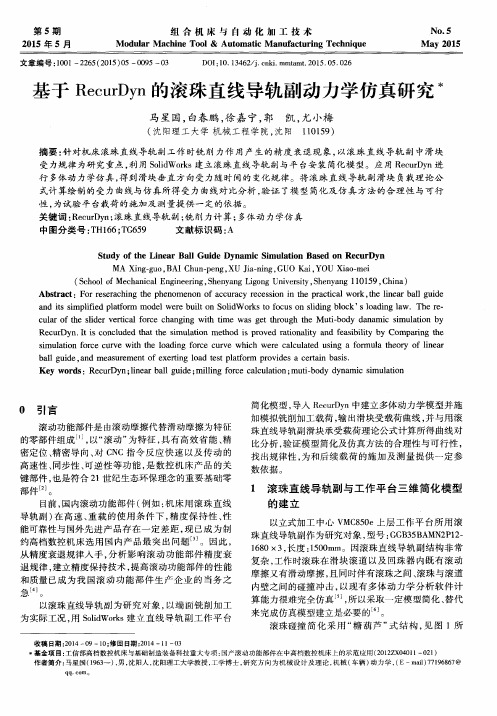
S t ud y o f t h e Li n e a r Bal l Gu i d e Dy na mi c S i m ul a t i o n Ba s e d o n Re c u r Dy n
MA Xi n g — g u o , B AI C h u n — p e n g, XU J i a — n i n g , GUO K a i , YO U Xi a o — me i
Ke y wo r d s:Re c u r Dy n; l i n e r a b a l l g u i d e; mi l l i n g f o r c e c a l c u l a t i o n; mu t i — b o dy d y n a i c m s i mu l a t i o n
( S c h o o o f M e c h a n i c a l E n g i n e e r i n g , S h e n y a n g L i g o n g U n i v e r s i t y , S h e n y a n g 1 1 0 1 5 9 , C h i n a )
基于Recurdyn的绳轮式电动玻璃升降器的动力学仿真

动 与钢 丝相联 的滑动 支 座 , 使 滑 动 支 座 沿 着 支架 机 构 中 的导槽 作 上下 运动 ,而滑动 支座 上 固定着 门窗玻 璃 ,从 而 使玻 璃 上 升 或 下 降 。其 优点 是零 件 少 、 重 量轻 , 安装 位 置 可 以调 整 , 缺 点 是 钢丝 绳 的轨迹 必须 和玻璃 滑槽 统一 , 否则 会 出现 卡滞 现象 J 。 本文 以捷 达车 后 门的 电动 玻 璃 升 降 器 为例 , 针 对绳 轮式 电 动玻 璃 升 降器 的缺 点 , 采用 R e c u r d y n多 体 动力 学 仿 真 软 件 , 对 璃 升降 器在线 检测 提供 理论 依据 。
图2 绳轮式电 动玻璃升降 器的 简化装配
基金项 目: 吉林省科技厅项 目( 2 0 1 2 1 5 1 0 8 ) 作者简介 : 杨华鹏 ( 1 9 8 7 一 ) , 男, 甘肃庆 阳人 , 硕士研究生 , 主要 从事数字化设计 , 检测技 术方向的研究 。 李庆华 ( 1 9 6 8 一 ) , 男, 吉林蛟 河人 , 教授 , 博士, 主要从事机械测控及 机械数字化设 计研究 。
第2 3卷
第1 0期
长
春
大
学
学
报
V o 1 . 2 3 No . 1 0
0c t .201 3
2 0 1 3年 l 0月
J OUR NAL 0F C HAN GCHUN U NI VE RS I T Y
基于 R e c u r d y n的绳轮式 电动玻璃 升降器的动力学仿真
第1 0期
杨华鹏 , 等: 基于 R e c u r d y n的绳轮式 电动玻璃升降器 的动力学仿真
recurdyn软件简介
RecurDyn概述RecurDyn (Recursive Dynamic)是由韩国FunctionBay公司基于其划时代算法——递归算法开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解大规模及复杂接触的多体系统动力学问题。
传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决得远远不够完善,这其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,韩国FunctionBay 公司充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn软件。
该软件具有令人震撼的求解速度与稳定性,成功地解决了机构接触碰撞中上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
RecurDyn 借助于其特有的MFBD(Multi Flexible Body Dynamics)多柔体动力学分析技术,可以更加真实地分析出机构运动中的部件的变形,应力,应变。
RecurDyn 中的MFBD 技术用于分析柔性体的大变形非线性问题,以及柔性体之间的接触,柔性体和刚性体相互之间的接触问题。
传统的多体动力学分析软件只可以考虑柔性体的线型变形,对于大变形,非线性,以及柔性体之间的相互接触就无能为力了。
RecurDyn 给用户提供了一套完整的虚拟产品解决方案,可以和控制,流体,液压等集合在一起进行分析。
形成机、电、液一体化分析,为用户的产品开发提供了完整的产品虚拟仿真、开发平台。
RecurDyn 的专业模块还包括,送纸机构模块,齿轮元件模块,链条分析模块,皮带分析模块,高速运动履带分析模块,低速运动履带分析模块,轮胎模块,发动机开发设计模块。
鉴于RecurDyn的强大功能,软件广泛应用航空、航天、军事车辆、军事装备、工程机械、电器设备、娱乐设备、汽车卡车、铁道、船舶机械及其它通用机械等行业。
Ansys多体动力学仿真软件:RecurDYN介绍
Ansys多体动力学仿真软件:RecurDYN介绍Ansys 多体动力学仿真软件:RecurDYN 介绍传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决的远远不够完善,其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,FunctionBay Inc.充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn 软件,具有令人震撼的求解速度与稳定性,成功地解决机构接触碰撞中的上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn 不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
特色功能强健的隐式积分器和混合积分器 ?相对坐标和递归算法,求解快速稳定 ?多种接触方式,柔性体的接触碰撞 ?柔性体分析,包括大变形、非线性 ?多级子系统 ?图层管理 ? 完全windows 风格客户价值相对坐标系的运动方程,完全递归算法及强健的求解器,使RecurDYN 具有飞驰般的求解速度 ?完全的基于WINDOWS 开发的软件,操作界面友好,易学易用 ?装配自动化,大大减少人工工作量,提高了效率 ?求解稳定可靠,结果令人信服 ?可在最短的时间内修正设计方案,极大的缩短产品的设计周期 ?专用工具包,针对特定应用,为用户量身定制? Solid,前后处理模块广州有道科技培训中心 h t t p ://w w w .020f e a .c o m2D、3D 模型建立;可读取各种CAD 格式的模型文件;可调式的彩色显示功能显示系统/子系统结构,具有子系统模块化功能;提供图层结构管理;模型参数化;灵敏度分析,实验设计分析(DOE);客户化界面;图表;动画;曲线编辑器;数据过滤器;傅立叶变换,多视窗分割显示;可输入外部数据文件。
Solver,求解器完全递归式方程结构;数值运算器DDASSL/IMGALPHA;数值阻尼可适应性自动化,去除数值上的杂讯;可进行批处理运算;可调整CPU 的优先使用权,加速分析执行;内建轮胎/路面力(TIRE)模块;非线性梁、板单元;提供完整的2D/3D(曲面与曲面)接触分析。
基于RecurDyn的4自由度液压机器人的动力学建模研究
基 于 R cr y eu D n的 4自 由 度 液 压 机 器 人 的 动 力 学 建 模 研 究
侯 敬巍
吉林 大 学
长春
1 0 2 305
摘
要 :为 了 全 面分 析 4自 由度 液 压 机 器人 的 综 合性 能 ,提 出 了基 于数 字 化 虚 拟 样 机 R c ry 仿 真 方法 。 euD n的
文章编号 :10 — 7 5 (O I 3~ 0 0一 4 0 1 0 8 2 l )0 05 o
A sr c :I re o rh n i l a a z eo e l p r r a c f h O ( e reo e d m)h d a l b tat nod r oc mpe e s e n yet vr l e om n eo e D F d ge f re o t vy l h a f t 4 f yr i uc
rbt,h ae rpssh i l i e o ae nd6 avr ap tt eR cr y , n s m ta y td s o oos te pr o oe es a o m t dbsdo i t iul r o p euD n ads t a cl u i — p p t mu t n h l t o y y e i ls e r
ery ru teknmac n y a c ahm t a m dl gcl ltn.T e eerhm to pl s o pee — uD nt o@ h i t saddnmi m te ai l oei a uao s h sac e dapi m rhn h e i s c n c i r h ec
基于RecurDyn的动力学与控制一体化仿真模式研究
航 天 控 制Aer os pace Contr ol Jun 12010Vol 128,No .3基于Recur Dyn 的动力学与控制一体化仿真模式研究黄铁球1 果琳丽2 曾海波31.北京交通大学机械与电子控制工程学院,北京1000442.西北工业大学航天学院,西安7100723.北京控制工程研究所,北京100190摘 要 研究以动力学软件Recur Dyn 所建立的复杂卫星动力学模型,和以Si m 2ulink 和C ++语言分别建立的控制系统模型间的一体化仿真模式,通过2次开发和数据通信接口的编制,提供了2种实现该复杂卫星系统动力学模型与2类控制系统模型间的一体化仿真模式。
关键词 多体动力学;控制;一体化仿真;卫星中图分类号:TP391.9 文献标识码:A 文章编号:100623242(2010)0320060205I n tegra ted S i m ul a ti on M odes Study of D ynam i cs andCon trol Ba sed on RecurD ynHUANG Tieqiu 1 G UO L inli 2 ZENG Haibo31.Beijing J iaot ong University,Beijing 100044,China2.Northwestern Polytechnical University,Xi ’an 710072,China3.Beijing I nstitute of Contr ol Engineering,Beijing 100190,ChinaAbstract Recur Dyn is adopted to establish the dynam ic m odel of a sa tellite,and Si m ulink and C ++language are adopted to establish the control m odel,the integrated si m u lation m odes are stud ied based on this dynam ic m odel and control m odels .Through seconda ry develop m ent of in terface program ,t w o kinds of integra ted si m ula tion m odes a re provided .Key words M ulti 2body dynam ics ;Control ;Integra ted si m ulation;Satellite 收稿日期:2010203218作者简介:黄铁球(1971-),男,湖南人,讲师,博士,主要研究方向为多体动力学及多学科协同仿真;果琳丽(1975-),女,河南人,硕士,研究员,主要研究方向为航天器总体设计;曾海波(1972-),男,广东人,高级工程师,博士,主要研究方向为挠性多体卫星姿态和指向控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图1 经简化的一对空链节模型
二、仿真分析
1.运动状态与干涉校验
首先必须考虑到链条柔度对运动的干涉影响,即考虑到在设计的平面柔度和扭转柔度范围内,长链条和最图2 链式输送机构的仿真模型图3 链式输送机构的运动仿真图4 链节的空间位移曲线
CAD/CAM与制造业信息化・www.icad.com.cn
图5 冲击动载荷分析
3.运动平稳性分析
由于链式输送模型中含有多种非线性因素,采用完全递归算法,对各链节的各自由度运动幅值的敛散性进行分析,来判定链式输送系统的运动平
图6 加速度响应
4.抱紧力分析
抱紧臂的抱紧力设计也十分重要,
该值越大,抱紧传输体越可靠,但装卸
传输体就困难了;另一方面,从链节中
脱出传输体将消耗过多的能量,对其
他的相关机构工作不利。
若该值较低,
则容易使传输体在输送过程的剧烈抖
动中掉落,产生故障,因此需要进行抱
紧臂的抱紧力动态载荷分析,分析结
果如图7所示。
图7 动态载荷分析
三、结束语
本文应用RecurDyn多体动力学软
件,在导入原有实体模型的基础上,快
速构建仿真模型。
根据RecurDyn提供
的多级子系统建模、空间多接触和完
全递归算法等特有功能,对复杂链式
输送机构的分析问题进行了动力学仿
真,得到了做为设计参考的动力学参
数,为链式输送机构的动力学设计提
供了很好的设计校验方法。
仿真结果
可以检测输送系统工作的平稳性和可
靠性,并预测链式输送机构故障的发
携手济钢机制公司,WIT-CAPP续写业界辉煌
近日,华特软件与济钢集团机械设备制造公司
公司”)正式签订CAPP合同。
秉承“可遵、可信、共赢”的济钢机制公司是济南钢铁集团直属的子
CAD/CAM与制造业信息化・www.icad.com.cn。