第五章劳斯判据
控制工程基础:第五章 控制系统稳定性分析

时,系统闭环后稳定。
2
Nyquist 稳定性判据2
1、若开环传递函数在s右半平面无极点时,当从0变化
时,如果Nyquist曲线不包围临界点(-1, j0),则系统稳定。
如果Nyquist曲线包围临界点(-1, j0),则系统不稳定。
❖ 系统稳定性定义:
❖
控制系统处于某一平衡状态下受到扰动作用而偏离了 原来的平衡状态,在干扰消失后系统又能够回到原来的平衡 状态或者回到原平衡点附近,则称该系统是稳定的,否则, 该系统就是不稳定的。
❖
稳定性是系统的一种固有特性,它只取决于系统本身的 结构和参数,而与初始状态和外作用无关。
m
F
F
单摆系统稳定
p(s)
p(s) DK (s)
系统稳定的充要条件:特征方程的根全部具有负实部
(闭环极点均在s平面的左半平面)。
即系统稳定的充要条件为:F(s)的零点都位于s平面 的左半平面。
GB(s)
F(s)
Gk(s)
零点
极点
零点
极点
极点
零点
1、若开环极点均在s平面左半面,则根据米哈伊洛夫定理推论:
arg[
DK
两种特殊情况
1、劳斯阵列表某一行中的第一列元素等于零,但其余各项不 等于零或不全为零 处理方法:
用一个很小的正数 代替该行第一列的零,并据此计算出
阵列中的其余各项。然后令 0 ,按第一列系数进行
判别。
如果零上下两项的符号相同,则系统存在一对虚根,处于临 界稳定状态:如果零上下两项的符号不同,则表明有一个符 号变化,系统不稳定。
0
1
c1
1
b1
a1 b1
a3 110 (7)5 6.43
第五章劳斯判据
试判定该系统的稳定性,系统的特征方程为:
s 2 s 24 s 48 s 25 s 50 0
5 4 3 2
解:
s s
5 4 3 2 1 0
1 2
24 48
25 50
计算劳斯行列式
s s s s
8 0
24 112 .7 50
4
96 0
50
辅助多项式:
P ( s ) 2 s 48 s 50
3 2
s' 4 s' 6 s'11 K 0
3 2
s
'3 '2 '1
1 4 35 K 4 K 11
6 K 11 0 0
劳斯行列式:
s s s
'0
35 K 0 令 K 11 0
,
则有11<K<35。
当11<K<35时,所有闭环极点落在s=-1垂线左侧。
b3
a n 1a n 6 a n a n 7 a n 1
c1
b1a n 3 a n1b2 b1
,c2
b1an 5 an1b3 b1
s
0
c 3
b1an 7 an1b4 b1
c1b2 b1c2 c1
,
c1b3 b1c3 c1
d1
解: (1)系统闭环传递函数
G闭 ( s ) G0 ( s ) 1 G0 ( s )
s
3 2
K s 7 s 17 s K
3 2
1 7 119 K 7 K
17 K 0 0
令 119 K 7 0,
劳斯行列式:
机械工程控制基础 第五章

第五章简介:本章介绍了单输入单输出控制系统稳定性的定义及其判定依据。
对于不同的系统,稳定性的定义不同。
系统的稳定性指标是控制系统设计过程中需要考虑的众多性能指标中最重要的指标,不稳定的系统是无法使用的。
主要包括赫尔维茨判据、劳斯判据、幅角原理、奈奎斯特稳定性判据等概念.重点是赫尔维茨稳定性判据和劳斯稳定性判据及其在系统分析中的应用.难点是应用复变函数的幅角原理推导奈奎斯特稳定性判据和对稳定裕度的理解。
随堂测试:一、知识点名称1:控制系统稳定性的基本概念1。
是保证控制系统正常工作的先决条件。
()A.稳定性B.快速性C.准确性D.连续性正确答案:A解析:不稳定的系统是无法使用的。
2。
是控制系统最重要的性能指标。
()A.稳定性B.快速性C.准确性D.连续性正确答案:A解析:稳定性是控制系统最重要的性能指标知识点名称2:单输入单输出控制系统稳定的条件1.单输入单输出控制系统稳定的条件为()A 特征方程根具有副实部B特征方程根具有副实部C极点位于复平面的右半部D极点位于虚轴上正确答案:A解析:单输入单输出控制系统稳定的充分必要条件为特征方程根全部具有副实部2。
某单位反馈系统的开环传递函数为,则该系统稳定的K值范围为() A.K〉0 B。
K>1 C。
0〈K<10 D K〉-1正确答案:A解析:其特征方程为,根据二阶螺丝准则和朱里准则,该系统稳定条件为;所以的K的取值范围为K〉0知识点名称3:赫尔维茨稳定性判据1。
赫尔维茨矩阵的各项主子式行列式的值全部为正,是线性系统稳定的条件。
()A.充分 B 必要C充要 D 即不充分也不必要正确答案:C解析:线性系统稳定的充要条件赫尔维茨矩阵的各项主子式行列式的值全部为正。
2。
如果满足主子式前提下,若所有次顺序赫尔维茨矩阵的主子式为正,则所有次顺序赫尔维茨矩阵的主子式为正。
()A BC D正确答案:B解析:如果满足条件,若所有奇次顺序赫尔维茨矩阵的主子式为正,则所有偶次顺序赫尔维茨矩阵的主子式必为正;反之亦然。
劳 斯 判 据

图4-1 系统的结构图
1
K
系统的闭环传递函数为
(s)
C(s) R(s)
1
s
(s 1
1)(s K
2)
s3
K 3s2
2s
K
s (s 1)(s 2)
系统的闭环特征方程为
s3 3s2 2s K 0
劳斯判据
1.4 劳斯判据在系统分析中的应用
列出劳斯表为
s3
1
2
s2
3
K
s1 6 K 3
s0
D(s)
n
(s pj )
n1
n2
(s pl ) (s2 2k s k2 )
j 1
l 1
k 1
n1
将式(4-2)展成部分分式形式 C(s)
Al
n2
Bk
l1 s pl k 1 s2 2k s k2
(4-2) (4-3)
式中 Al —— C(s) 在闭环实极点 pl 处的留数;
Bk —— C(s) 在闭环复数极点 s k jk 1 2 处的留数。
方法一:用一个接近于零的很小的正数来代替这个零,并据其计算出劳斯表中的其 余各项。
方法二:用代入原方程,重新列出劳斯表,再用劳斯判据判断系统的稳定性。
劳斯判据
1.3 劳斯判据的特殊情况
【例 4-3】 已知系统的闭环特征方程为
s4 2s3 s2 2s 1 0
试用劳斯判据判断系统的稳定性。
在劳斯表第1列系数中,ε是接近
在零初始条件下,若闭环系统的输入信号 r(t) 在[0,) 上满足 r(t) N ,而在此输入信
号作用下的输出响应 c(t)
g( )r(t
)d
满足
机械控制工程基础第五章练习习题及解答

题型:选择题题目:关于系统稳定的说法错误的是【】A.线性系统稳定性与输入无关B.线性系统稳定性与系统初始状态无关C.非线性系统稳定性与系统初始状态无关D.非线性系统稳定性与系统初始状态有关分析与提示:线性系统稳定性与输入无关;非线性系统稳定性与系统初始状态有关。
答案:C习题二题型:填空题题目:判别系统稳定性的出发点是系统特征方程的根必须为或为具有负实部的复数,即系统的特征根必须全部在是系统稳定的充要条件。
分析与提示:判别系统稳定性的出发点是系统特征方程的根必须为负实数或为具有负实部的复数,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。
答案:负实数、复平面的左半平面习题三题型:选择题题目:一个线性系统稳定与否取决于【】A.系统的结构和参数B.系统的输入C.系统的干扰D.系统的初始状态分析与提示:线性系统稳定与否取决于系统本身的结构和参数。
答案:A习题四题型:填空题题目:若系统在的影响下,响应随着时间的推移,逐渐衰减并回到平衡位置,则称该系统是稳定的分析与提示:若系统在初始状态的影响下(零输入),响应随着时间的推移,逐渐衰减并趋向于零(回到平衡位置),则称该系统是稳定的;反之,若系统的零输入响应发散,则系统是不稳定的。
答案:初始状态习题五题型:填空题题目:系统的稳定决定于的解。
分析与提示:系统的稳定决定于特征方程的解。
答案:特征方程题型:填空题题目:胡尔维兹(Hurwitz )判据、劳斯(Routh )判据又称为 判据。
分析与提示:胡尔维兹(Hurwitz )判据、劳斯(Routh )判据,又称为代数稳定性判据。
答案:代数稳定性习题二题型:填空题题目:利用胡尔维兹判据,则系统稳定的充要条件为:特征方程的各项系数均为 ;各阶子行列式都 。
分析与提示:胡尔维兹判据系统稳定的充要条件为:特征方程的各项系数均为正;各阶子行列式都大于零。
答案:正、大于零习题三题型:计算题题目:系统的特征方程为010532234=++++s s s s用胡尔维兹判据判别系统的稳定性。
第五章 控制系统的稳定性分析

arctan
b a
2
arctan
j
b a
jw
1
s1 tan1 b
b
a
a Re
22
若上式b为负值,则角增量为
2
2
arctan
b a
如图:
j
jw
a
2
Re
tan1 b
s2
a b
23
若根在右半平面,其角增量如图所示,
j jw
tan1 b
3
b
a
a
Re
为
2
2
arctan
b a
24
现考虑n次多项式 Ds,且在原点有q个零点,可表示为
代入D(s)并命w从0增大到 时,复数D(s)的角连续增
大 ng
2
二 乃奎斯特稳定判据
1 反馈系统开环和闭环的特征方程式
Xi s
X0 s
27
该单位反馈系统的开环传递函数为
G
s
MK s DK S
闭环传递函数为
s
Gs 1Gs
DK
MK s s Mk
s
MK s Db s
令:F
s
1
G
s
1
MK DK
s s
arg1 G( j。w) 90o
列 系统的开环传递函数为
Go
(s)
(T1s
K 1)(T2s 1)(T3s
1)
讨论开环增益K的大小对系 统稳定性的影响
解:这是一个三阶系统,没有开环零点,且开环极点全部 位于左半s平面,因此是最小相位系统。 作极坐标草图,先计算极限值:
32
=0时,有
A(0) K
第五章劳斯稳定性判据

如果劳斯表中第一列的系数均为正值,则其特征方程 式的根都在S的左半平面,相应的系统是稳定的。
如果劳斯表中第一列系数的符号有变化,其变化的 次数等于该特征方程式的根在S的右半平面上的个数,相应 的系统为不稳定。
C(s)
bmsm bm1sm1 sn an1sn1
b1s b0 a1s a0
xi
s
n1
aj
n2 i (s ii ) i i
1
2 i
j1 s p j i1
s2 2ii s i2
06-7-20
控制系统的稳定性分析
S4
2
12Biblioteka 16明该方程在S右半平面S3
0
0
0
8
24
上没有特征根。令 F(s)=0,求得两对大 小相等、符号相反的
S2
6
16
根 j 2 , j2
S1
8
0
3
,显然这个系统处于临界稳定状态。
06-7-20 S 0
16
控制系统的稳定性分析
23
劳斯判据特殊情况之三 特征方程在虚轴上有重根
如果特征方程在虚轴上仅有单根,则系统的响应是持续 的正弦振荡,此时系统既不是稳定的,也不是不稳定的,因 而称之为临界稳定;如果虚根是重根,则系统响应是不稳定
1.稳定性是控制系统自身的固有性质,这稳定性取决于系 统的固有特征(结构、参数),与系统的输入信号无关;
A:对线性系统,系统是大范围稳定的(与输入偏差无 关);
劳斯判据的证明及应用
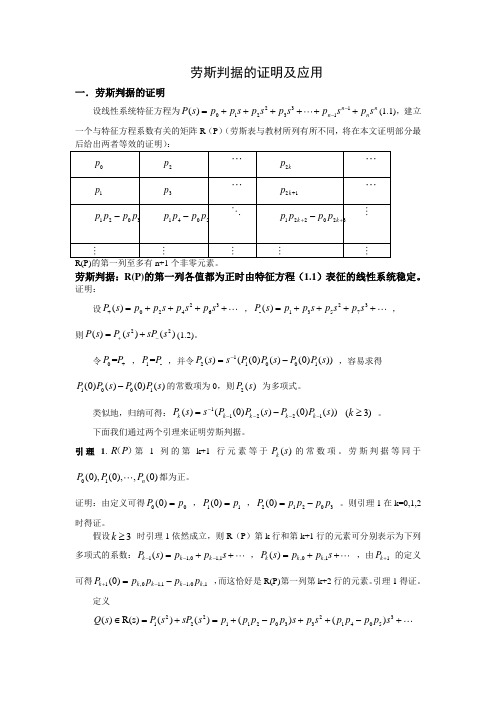
劳斯判据的证明及应用一.劳斯判据的证明设线性系统特征方程为23101231()n n n n P s p p s p s p s p s p s --=++++++(1.1),建立一个与特征方程系数有关的矩阵R (P )(劳斯表与教材所列有所不同,将在本文证明部分最劳斯判据:R(P)的第一列各值都为正时由特征方程(1.1)表征的线性系统稳定。
证明:设23+0246()P s p p s p s p s =++++ ,23-1357()P s p p s p s p s =++++,则22()()()P s P s sP s +-=+(1.2)。
令0+=P P ,1-=P P ,并令121001()((0)()(0)())Ps s P P s P P s -=- ,容易求得 1001(0)()(0)()P P s P P s -的常数项为0,则2()P s 为多项式。
类似地,归纳可得:11221()((0)()(0)())k k k k k P s s P P s P P s -----=- (3)k ≥ 。
下面我们通过两个引理来证明劳斯判据。
引理1.R P ()第1列的第k+1行元素等于()k P s 的常数项。
劳斯判据等同于01(0),(0),,(0)n P P P 都为正。
证明:由定义可得00(0)P p = ,11(0)P p = ,21203(0)P p p p p =- 。
则引理1在k=0,1,2时得证。
假设3k ≥ 时引理1依然成立,则R (P )第k 行和第k+1行的元素可分别表示为下列多项式的系数:11,01,1()k k k P s p p s ---=++,,0,1()k k k P s p p s =++,由1k P + 的定义可得1,01,110,1(0)k k k k k P p p p p +--=-, ,而这恰好是R(P)第一列第k+2行的元素。
引理1得证。
定义2223121120331405()R(s)()()()()Q s P s sP s p p p p p s p s p p p p s ∈=+=+-++-+由()P s 的定义易知Q 的最高阶最大为n-1.我们姑且假设1n p ≠ ,下面给出引理2: 引理2.下述表达等效:(1) 特征方程P(s)表示的线性系统稳定且0n p > 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当得到完整的劳斯行列式后,令ε→0,检验第一列的 符号变化次数;
若符号没有发生变化,则说明系统具有一对纯虚根,可 利用辅助方程求出;
若符号发生变化,符号变化的次数,就是系统具有不
稳定根的个数。
W
8
例5.3 s 5 2 s 4 2 s 3 4 s 2 s 1 0
S5 1
2
1
S4 2
4
s 1 112 .7
s 0 50
辅助多项式: P(s)2s44s8250
求p(s)对s 的导数:
dP(s) 8s3 96s ds
导数方程的系数代入s3 行W 。
12
例5.6
s5 1 s4 2
24 25 48 50
部说号行
的 根
明 系
变
列 式
s 3 0 ( 8 ) 0 ( 96 ) s 2 24 50
系统稳定的充分必要条件是系统特征根 (极点)全部具有负实部。
解析方法 - 求解系统的特征方程 高阶系统求解困难 劳斯稳定判据
W
3
5.1.2 劳斯(E. J. Routh)稳定判据
已知系统的特征方程式为:
a n s n a n 1 s n 1 a 1 s a 0 0
(1) 系统特征方程式的系数必须皆为正 — 必要条件; (2) 劳斯行列式第一列的系数全为正 — 充分条件; (3) 第一列的系数符号改变的次数等于实部为正的根 的个数。
解:(2)令ss'1, 代入闭环特征方程:
( s ' 1 ) 3 7 ( s ' 1 ) 2 1 ( s ' 7 1 ) K 0 ,
s'3 4s'2 6s' 1 1 K0
s '3
劳斯行列式: s '2
s '1
s '0
1
4 35 K
4 K 11
6 K 11
0
0
令3K51K100 ,
则有11<K<35。
辅助方程是系统特征方程的一个因子式。
W
13
5.1.3 劳斯稳定判据的应用
1、判断系统的稳定性 2、分析系统参数对系统稳定性的影响
W
14
例5.7 控制系统方块图如图所示,确定能保证该
系统稳定的K值范围。
R(s)
K
Y(s)
解:系统的闭环传递函数为: ﹣ s(s2 s1)(s2)
Y R((ss))s(s2s1K )(s2)K
方程解为:
s1,20.821 8.4527s32-j1.8423
s4,5-0.W907 13 .3690j
10
(2)某行的系数都为零
l 表明系统具有成对的实根或共轭虚根,这些根 大小相等,符号相反;
l 利用全零行上面的一行系数构成辅助多项式 P(s),然后由 dP ( s ) 的系数代替零行,继续 ds 劳斯行列式的计算;
l 辅助多项式为系统特征多项式的因子式,可以 通过求解辅助方程求出那些对根。
W
11
例5.5
试判定该系统的稳定性,系统的特征方程为: s 5 2 s 4 2 s 3 4 4 s 2 8 2 s 5 0 0
解:
s 5 1 24 25
s 4 2 48 50
计算劳斯行列式
s 3 08 906 s 2 24 50
解:计算劳斯行列式如下:
s5
1
3 10
s4
2
6 15
s 3 0 5/2
s2
6 5
15
s1
30 2530 2
12 10
s0
15
ε→0 首列整理为:
符号改变一次 →
符号改变一次 →
s5 1 s4 2 s3 s2 5 / s 1 25 / 10 s 0 15
系统有二个实部为正的特征根,系统是不稳定的。
其闭环特征方程为: s 4 3 s3 3 s2 2 s K 0
劳斯行列式为: s 4
s3 s2 s1 s0
1
3 K 解题思路:
3
2 0 1、列出闭环传递函数
7/3 K
2、写出闭环特征方程式
2(9/ 7)K
3、利用劳斯行列式判断
K
为使系统稳定,K必须大于零,同时还必须满足:
279K0,
即K
14 9
因此,保证系统稳定的KW值范围是 0K1/49。 15
c4 d4
c1
b1an3 an1b2 b1
,c2
b1an5 an1b3 b1
c3
b1an7an1b4, b1
d1
c1b2 b1c2 c1
,
d2
c1b3b1c3 c1
,
劳斯稳定判据: 系统稳定的必要且充分条件是:在
系统特征方程的系数全为正的基础上,劳斯行列式中
第一列的系数全为正号。 W
5
例5.1 利用劳斯稳定判据,判断下列系统的稳定性。
1
17Βιβλιοθήκη s27K劳斯行列式: s 1 119 K 0
7
s0
K
0
令119K 0, 7
则K=119。
由为零的上一行组成辅助方程:
P(s)7s2K 119 0
可求出:
s2 1,7 s1j,7 W
n1。 7 (振荡频17 率)
? G闭s37s2K 17 sK
(2) 若要求闭环极点全部位于s = -1 垂线的左侧,求K的取值范围。
第五章 线性定常连续系统分析 本章主要内容
➢ 系统(运动)稳定性概念 (Stability)
❖ 熟练掌握Routh,Nyquist稳定判据
➢ 静态误差计算 (Static Error)
❖ 有关定义和计算
➢ 二阶动态系统的运动特征 (Second Order Dynamic System)
❖ 各类性能指标定义和二阶系统运动分析
W
4
劳斯行列式:
sn an an2 an4
s n1 an1 an3 an5
s n2 b1
b2
b3
sn3 c1
c2
c3
sn4 d1
d2
d3
s0
a n s n a n 1 s n 1 a 1 s a 0 0
a n6 a n7 b4
bb13aann11aann aa26nn 11aannaann37b,2, an1ana4n1anan5
Y(s)
2s1
R(s)s47s31s822s110
解:它的特征方程式是:s 4 7 s 3 1s 2 8 2s 1 1 0 特征方程式中系数皆为正,满足稳定性的必要条件,
劳斯行列式:
s 4 1 18 10 s 3 7 21 0
s2 105 7
10
0
s1 1715 105
00
s 0 10 0
劳斯行列式第一列全为正,因而系统是稳定的。
,统化第 系有 一 统一一列
s 1 112 .7 0 s 0 50
不 稳
个 正
次
系 数
定实,符
。
可利用辅助方程求出那些大小相等,符号相反的根:
P(s)2s44s8250 (s22)5s(21)0
s 1 , s 5j
原 ( s 方 1 ) s ( 1 ) s ( 程 j 5 ) s ( j 5 ) s ( 2 )
当11<K<35时,所有闭环W极点落在s=-1垂线左侧。18
例5.8
已知单位反馈控制系统的开环传递函数为 K
G0(s)s(s2 7s17)
(1) 确定使闭环系统产生持续振荡的K的取值,并求
振荡频率。 (2) 若要求闭环极点全部位于s = -[1s垂’] 线的左[侧s],求
K的取值范围。
分析:
-1 0
(1) 若使系统产生持续振荡,则必有一对共轭虚根存在。
系统的振荡频率就是此根的虚部值。
W
1
5.1 控制系统的稳定性分析
控制系统设计的首要目的就是要确保被控系统的 稳定; 控制系统的稳定性:输入是有界信号时,当t→∞ 时,其输出也是有界值; 线性系统的稳定性是系统自身的一种属性。
W
2
5.1.1 系统稳定性的概念及条件
一个稳定系统可定义为:在有界输入的情况下, 其输出也是有界的。
符号改变一次 →
s2 s1
1 6
5 0
0 0
符号改变一次 → s 0 5 0
该系统的特征方程式有两个实部为正的特征根,
系统不稳定。 系统的4个根为:
s 1 ,2 1 .2 0 9 .8j,7 s 3 ,4 2 .9 1 .4j2
W
7
几种特殊情况
(1)第一列有零值出现
用一很小的正数ε来代替这个零,并继续劳斯行列式 的计算;
实际上该系统的4个根为: s 1 1 .9 , 4 s 2 2 . W7 , s 6 3 ,4 1 .1 0 . 5 7 j6 3
例5.2 若一系统的特征方程为:
s4 2 s3 3 s2 4 s 5 0
利用劳斯稳定判据,判定系统是否稳定。
解:列写劳斯行列式: s 4 1 3 5
s3 2 4 0
1
1
S3 0
2
0
S2 4 1 1
1
0
S1 1
0
0
2
S0 0
0
0
系统不稳定,第一列元素两次变号,有两个正根在右 半平面。
特征根(Matlab:c=W[1 2 2 4 1 1];roots(c)) 9
例5.4 试判定该系统的稳定性,系统特征方程为:
s 5 2 s 4 3 s 3 6 s 2 1 s 0 1 0 5
(2) 只要把虚部向左平移1,构成新的s’ 复平面: ss'1