激光雷达技术及其应用_陈利
激光雷达与应用范文
激光雷达与应用范文
一、激光雷达的简介
激光雷达(Lidar),也称为激光探测和测距雷达,是一种利用激光雷达技术来检测静态或动态物体的远距离测量技术。
它的工作原理是:当激光射出时,光束会反射到离开它的物体上,然后探测器会检测到反射回来的信号,并据此测量距离。
此外,由于激光雷达能够监测到传播激光束的运动轨迹,因此它还可以用于对动态物体进行高精度测量。
激光雷达的主要优点是它的高精度、快速反应能力和精确度高。
它主要可以应用于航空航天、自动驾驶、环境监测等领域。
具体的应用有:
1.计算机视觉:激光雷达可以用于构建三维立体图像,用于计算机视觉、机器人导航和其他机器人视觉系统的深度测量;
2.三维地形测量:激光雷达可以快速准确地测量出地形地物的三维位置,用于环境监测、建筑测量和人类对大自然环境的了解;
3.激光测距:激光雷达的应用可以用于高精度测量,如测量建筑物的距离、长度和海拔高度等;
4.天气监测:激光雷达可以用于雾、云、风速、降水量、气温等环境因素的监测,为气象研究和预报提供重要依据;。
激光雷达综述
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
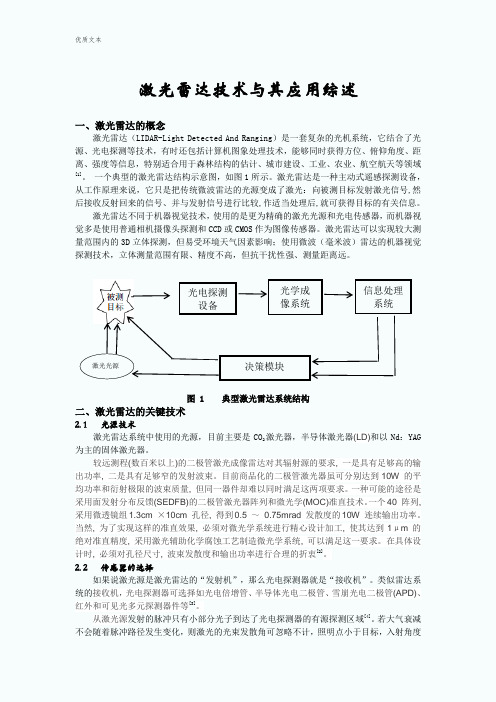
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。
激光雷达的工作原理与应用

激光雷达的工作原理与应用激光雷达(Lidar)是一种利用激光发射器和接收器来测量距离、速度和方向等信息的远距离感知技术。
激光雷达在自动驾驶、机器人导航、环境监测和三维建模等领域都有广泛的应用。
本文将介绍激光雷达的工作原理、组成结构和应用。
一、激光雷达的工作原理激光雷达利用激光器发射一束高强度激光束,通过接收反射回来的激光信号来进行测量。
其工作原理可以简单地分为三个步骤:发射、接收和信号处理。
1. 发射:激光雷达通过激光器发射一束脉冲激光光束。
这个激光光束通常是红外线激光,因为红外线光在大气中传播损耗小。
2. 接收:激光光束照射到目标物体上,并被目标物体表面反射。
激光雷达的接收器接收反射回来的激光信号。
3. 信号处理:接收到的激光信号通过光电二极管(Photodiode)或光纤传感器转换成电信号。
然后,这些电信号经过放大、滤波和数字化等处理,得到目标物体的距离、速度和方向等信息。
二、激光雷达的组成结构激光雷达通常由发射器、接收器和信号处理器等组成。
1. 发射器:激光雷达的发射器是用来发射激光脉冲的关键部件。
发射器通常由激光二极管或固体激光器等构成。
激光发射的功率和频率会影响到测量距离和精度。
2. 接收器:激光雷达的接收器是用来接收反射回来的激光信号的部件。
接收器通常包括光电二极管或光纤传感器等。
接收器的灵敏度和抗干扰性会影响到激光雷达的性能。
3. 信号处理器:激光雷达的信号处理器负责接收、放大和数字化等处理激光信号。
信号处理器通常包括模拟信号处理电路和数字信号处理电路。
通过信号处理,可以提取目标物体的距离、速度和方向等信息。
三、激光雷达的应用激光雷达具有高精度、远距离、快速测量和全天候工作等特点,因此在各个领域都有广泛的应用。
1. 自动驾驶:激光雷达是自动驾驶系统中的重要传感器之一。
它可以实时获取道路和障碍物的信息,帮助车辆进行精确的定位和避障。
2. 机器人导航:激光雷达在机器人导航中扮演着关键的角色。
激光雷达原理、关键技术及应用的深度解析
激光雷达原理、关键技术及应用的深度解析“雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图激光雷达是工作在光频波段的雷达。
与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。
激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频移大,可以探测从低速到高速的目标。
天线和系统的尺寸可以作得很小。
利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。
激光雷达的种类目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种: 按激光波段分:有紫外激光雷达、可见激光雷达和红外激光雷达。
按激光介质分:有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。
按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
按显示方式分:有模拟或数字显示激光雷达和成像激光雷达。
按运载平台分:有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、。
激光雷达技术范文
激光雷达技术范文激光雷达技术是一种利用激光来进行测距、测速和三维环境感知的技术。
它通过发射激光脉冲,利用回波信号与传感器之间的时间差来计算物体的距离,并通过接收器接收相应的信号进行处理,从而实现对周围环境的感知与定位。
激光雷达技术有着广泛的应用领域,包括自动驾驶、无人机导航、机器人导航、环境监测、建筑测绘等。
在自动驾驶中,激光雷达可以实时获取车辆周围物体的位置和速度信息,从而进行障碍物检测、路径规划和避障等操作,以实现智能化的驾驶。
在无人机导航中,激光雷达可以实时感知无人机周围的障碍物,以避免与障碍物碰撞。
在机器人导航中,激光雷达可以对机器人周围的环境进行三维建模,从而实现导航和定位。
在环境监测中,激光雷达可以用于空气污染检测、水质监测等。
在建筑测绘中,激光雷达可以用于测量建筑物的高度、体积和形状等。
激光雷达技术的原理是利用激光的特性进行测距。
激光是一种具有高密度、高单色性和高方向性的光束。
当激光束照射到物体上时,会发生散射。
激光雷达发射激光脉冲,并通过接收器接收回波信号。
根据回波信号与发送信号之间的时间差,可以计算出物体到激光雷达的距离。
激光雷达技术通常采用飞行时间测量(Time of Flight,TOF)原理来进行距离测量。
TOF原理基于光速不变的原理,通过测量光从发射到接收的时间来计算物体到激光雷达的距离。
具体而言,激光雷达发射激光脉冲,并记录下发送时刻。
当激光脉冲照射到物体上并发生散射后,部分散射的光会被激光雷达的接收器接收到。
接收器记录下接收到激光脉冲的时刻。
通过计算发送时刻和接收时刻之间的时间差,可以得到物体到激光雷达的距离。
激光雷达技术不仅可以进行距离测量,还可以实现激光雷达的旋转和三维点云数据的处理。
激光雷达通常采用旋转的方式来进行扫描,即通过旋转激光器和接收器的组合来实现对周围环境的全方位扫描。
旋转激光雷达可以发射多个激光束,从而实现对多个方向的测量。
根据每个激光束的距离测量结果,可以得到物体在三维空间中的坐标信息,从而构建出物体的三维点云模型。
激光雷达的基本原理和应用

激光雷达的基本原理和应用1. 激光雷达的基本原理激光雷达(Lidar)是一种利用激光束进行距离测量的技术。
它通过发射激光束并接收其回波,计算出目标物体与雷达的距离、方向和速度。
激光雷达的基本原理可归纳为以下几个步骤:•激光发射:激光雷达通过激光发射器产生一束短脉冲的激光光束。
•激光束传播:激光束在空气中以光速传播,并照射到目标物体上。
•激光回波接收:目标物体表面反射部分激光回到激光雷达上。
•回波信号检测:激光雷达接收器接收到回波信号,并将其转换为电信号。
•距离计算:通过测量激光束发射与回波到达时间之差,可以计算出目标物体与激光雷达的距离。
•方向计算:激光雷达通常使用旋转扫描方式,通过记录激光束发射时的角度和扫描到目标物体时的角度,可以计算出目标物体相对雷达的方向。
•速度计算:通过多次测量,记录目标物体在不同时间点的距离差,并计算其相对速度。
2. 激光雷达的应用激光雷达在许多领域都有广泛的应用,下面列举几个常见的应用领域:2.1 自动驾驶汽车激光雷达在自动驾驶汽车中起到了重要的作用。
通过安装在汽车上的激光雷达,汽车可以实时获取周围环境的三维点云数据,从而实现对障碍物的感知和识别。
激光雷达可以提供高精度的距离和方向信息,帮助汽车判断前方的障碍物,并采取相应的行驶策略。
2.2 机器人导航与感知激光雷达也广泛应用于机器人导航与感知领域。
机器人利用激光雷达可以建立物体和环境的三维模型,实现对环境的感知和理解。
这对于机器人在未知环境中的导航和避障至关重要。
2.3 三维重建激光雷达的距离测量功能使其成为三维重建领域的重要工具。
通过激光雷达扫描物体表面,可以获取大量的三维点云数据,进而重建出物体的三维模型。
这在虚拟现实、建筑设计、文物保护等领域具有重要应用价值。
2.4 气象观测激光雷达也被广泛应用于气象观测领域。
通过激光雷达可以对大气中的云、雨滴、雪花等进行探测和测量,进而获取气象信息。
这对于天气预报、气候研究等有重要意义。
激光雷达的应用场景
激光雷达的应用场景激光雷达是一种利用激光技术来测量距离和探测物体的设备。
它可以在各种应用场景中发挥重要作用。
1. 自动驾驶汽车激光雷达是自动驾驶汽车中不可或缺的一部分。
它可以通过扫描周围环境来获取精确的三维地图,帮助汽车实现精准定位、避障和规划行驶路线。
目前市面上很多自动驾驶汽车都采用了激光雷达技术,如特斯拉、Waymo等。
2. 机器人导航机器人也可以通过激光雷达来进行导航。
在工业生产线上,机器人需要准确地识别和定位物体,以便执行任务。
而激光雷达可以提供高精度的距离信息和环境地图,让机器人能够更加智能地移动。
3. 无人机无人机需要具备精准的定位和遥感能力,以便执行各种任务。
而激光雷达可以提供高精度的距离信息和地形数据,在无人机飞行时起到了至关重要的作用。
例如,在农业领域中,无人机可以通过激光雷达来测量农田的形状、高度和植被覆盖情况,以便精准地执行农业作业。
4. 建筑测量激光雷达可以用来进行建筑测量。
它可以快速地获取建筑物的三维结构信息,包括楼层高度、房间面积等。
这对于建筑设计、施工和维护都非常重要。
5. 智能家居在智能家居领域中,激光雷达可以用来实现室内定位和环境感知。
例如,在智能音响中,激光雷达可以扫描房间内的物体和人员位置,并根据这些信息调整音响的输出方向和音量。
6. 安防监控激光雷达也可以用来进行安防监控。
例如,在银行、商场等公共场所中,激光雷达可以扫描周围环境并检测异常行为,如盗窃或暴力事件。
总之,激光雷达在各种应用场景中都发挥着重要作用。
随着技术的不断进步和应用范围的不断扩大,激光雷达的应用前景将会更加广阔。
激光雷达的应用场景
激光雷达的应用场景
x
一、激光雷达的应用场景
激光雷达是一种高精度的距离测量和定位技术,它可以帮助精准测量和定位,在很多领域都有很多应用场景:
1、智能机器人:激光雷达可以帮助智能机器人完成巡航、位置定位、导航等功能,为其在空间上实现高精度的自主行动提供可靠技术支持。
2、自动驾驶:激光雷达可以构建自动驾驶车辆视野,帮助车辆自动识别和分析道路上的障碍物,为车辆实现高精度安全控制提供有力技术保障。
3、无人驾驶:激光雷达可以帮助无人机在室外飞行时进行环境识别、无人机定位导航等,保证各种飞行器的安全导航。
4、安全检测:激光雷达可以帮助渗漏检测、热成像检测等设备快速精准的检测出隐蔽表层的缺陷,避免因缺陷造成的危害。
5、智能安防:激光雷达可以用于智能安防,检测天气情况,报警系统,实现精准的安防服务。
6、物流追踪:激光雷达可以用于车辆定位、运动物体定位等,为物流追踪提供可靠的技术支撑。
7、产品质量检测:激光雷达可以用于产品质量检测,可以准确检测出被检测物体的质量参数,实现质量控制精确化。
- 1 -。
简述激光雷达应用
简述激光雷达应用激光雷达(Light Detection and Ranging,简称LiDAR)是一种利用激光技术进行测距和探测的设备。
它通过发射激光脉冲并测量脉冲从目标反射回来的时间来计算目标与激光雷达的距离,从而获取目标的位置和形状信息。
激光雷达具有高精度、高分辨率和快速测量等优势,因此在许多领域得到广泛应用。
一、自动驾驶激光雷达在自动驾驶领域中发挥着重要作用。
它可以实时扫描周围环境的物体,包括其他车辆、行人、道路标志等,生成高精度的三维地图。
自动驾驶车辆可以通过激光雷达获取的信息进行精确的定位和路径规划,从而实现智能驾驶。
激光雷达还可以提供障碍物检测和避障功能,确保车辆在行驶过程中的安全。
二、环境监测激光雷达在环境监测中的应用也非常广泛。
例如,激光雷达可以用于测量大气污染物的浓度和分布情况,帮助环保部门监测和控制大气污染。
此外,激光雷达还可以用于测量地表变化、水体深度和植被生长等自然环境参数,为环境保护和生态研究提供重要数据。
三、建筑测绘激光雷达在建筑测绘中有着广泛的应用。
传统的测绘方法需要人工测量和绘制,费时费力且易出错。
而激光雷达可以快速获取建筑物的三维结构信息,包括建筑物的高度、外形和内部结构等。
这对于建筑设计和城市规划非常重要。
激光雷达还可以用于监测建筑物的变形和沉降,帮助工程师及时发现问题并采取措施。
四、航空航天激光雷达在航空航天领域也有广泛的应用。
例如,激光雷达可以用于测量飞机和航天器的速度、位置和轨迹,帮助飞行员进行精确导航和控制。
此外,激光雷达还可以用于测量大气层厚度和大气湍流等气象参数,提供重要的气象数据支持。
五、军事应用激光雷达在军事领域中也发挥着重要作用。
它可以用于目标探测和跟踪,帮助军事人员实时获取敌方目标的位置和移动轨迹。
激光雷达还可以用于导弹制导和火力打击,提高精确打击的准确性和效果。
六、地质勘探激光雷达在地质勘探中有着重要的应用价值。
它可以用于测量地表地貌的形态和变化,帮助地质学家了解地球表面的演化过程。
激光雷达遥感技术及其应用
激光雷达遥感技术及其应用激光雷达遥感技术是一种利用激光束对地球表面进行高精度测量和三维重建的技术。
尤其在地球科学、环境监测、资源调查、灾害评估等领域具有广泛的应用。
本文将介绍激光雷达遥感技术的原理和工作方式,并探讨其在不同领域的应用。
激光雷达遥感技术基于“光电测距”原理,通过激光器向目标物体发射短脉冲激光束,然后接收目标物体反射回来的光信号,并利用接收到的光信号计算出目标物体与激光雷达之间的距离。
通过扫描或旋转激光束,可以获取目标物体在空间中的三维坐标信息,从而实现对地球表面的精密测量。
激光雷达遥感技术具有高精度、高分辨率和大范围的特点。
相较于其他遥感技术,激光雷达能够提供更为精确的地形模型和三维信息,可以有效地获取地球表面的地形起伏、建筑物高程、森林结构等参数。
因此,在领域如地图制图、城市规划、国土调查等方面发挥着重要作用。
在地球科学领域,激光雷达遥感技术被广泛应用于地貌演变、地震活动、火山喷发等自然灾害的监测和预测。
通过激光雷达获取的地形数据和三维点云可以提供地震带、断裂和火山口的精确位置和形态信息,为科学家研究地壳运动和火山活动提供重要数据支持。
同时,激光雷达也可以应用于沿海地区的海岸线监测,如海岸侵蚀、潮汐的变化等,为沿海城市规划和防护工程提供必要的信息。
在环境保护与管理领域,激光雷达遥感技术有助于评估和监测大气污染物的扩散和影响范围。
激光雷达可以将光束直接照射到大气中的污染物上,并通过接收污染物散射回来的光信号来分析、识别和定量污染物的类型和浓度。
这对于提前发现并防止大气污染事件的发生具有重要意义。
激光雷达遥感技术还在农业、林业和资源调查等领域有着广泛应用。
通过获取作物和森林的三维结构信息,可以在线路规划和灾害预警中发挥重要作用。
例如,激光雷达可以在森林资源调查中评估森林储量和生物多样性,指导合理的林业管理和保护措施,以促进可持续发展。
此外,激光雷达还可以用于大规模的地下资源勘察,如矿区勘测、地下水资源调查等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5 84
河南理工大学学报 (自然科学版 ) 2009年第 28卷
激光雷达[ 5] , 1978年 NASA/MFSC研制出了用于同一目的的 CO2干涉激光雷达[ 6 -7] .1976年用于研 究地球科学的星载激光雷达一经问世就得到重视 , NASA和 NOAA委托美国无线电公司和帕新 -爱而 莫公司开发用于测量全球对流层风场的 CO2相干激光雷达[ 8 -9] .1988年 NASA研制出激光大气风探 测器 , 空间分辨率达到 1000m左右 , 利用不同高度背向散射测量水平风场 [ 10 -11] .20 世纪 90 年代 , 由于全固体激光技术和二极管泵浦全固态技术的发展 , 较好地解决了制约星载激光雷达的寿命问题 , 开辟了高精度绘图 、 远程测距 、 环境监测 、 测云 、 测地被 、 测目标和非相干测风等应用邻域 , 发展了 基于 DPSS技术的差分吸收激光雷达 、 拉曼散射激光雷达 、 非相干多普勒激光雷达和生物激光雷达 等 , 显示出巨大的经济效益和军事价值 .
存贮 、 处理与分析 .激光雷达的测距原理与电磁波测距相同 , 即通过时间间隔测量装置得出发射与接
收的时间间隔 , 从而按下式计算测量距离 :
R =cΔ2 t,
式中 :c为光速 ;Δt为发射与接收的时间间隔 .
2.2激光雷达的数学模型
在物方空间坐标系中 , 一般设定发射中心为原点 , 扫描前进方向为 X轴 , 天顶方向为 Z轴 , 构
成右手坐标系 .该坐标系中有 6个外方位元素来表示发射中心的大地坐标和姿态参数 .扫描中心到地
面的距离 s由激光扫描器测定 , 扫描方向与 Z轴的夹角 θ由编码器记录 .扫描时 x=0, y=-s· sin
θ, z=-s· cosθ.每一扫描点的空间坐标 , 可根据摄影测量共线条件方程式计算 :XBiblioteka a1 a2 a3 x58 5
3 激光雷达的主要应用
由于激光雷达特有的优势 , 在国民经济建设中如农林业 、 军事侦察 、 水利电力勘查设计 、 道路设 计 、 国土资源与气象环境调查 、 国家基础测绘 、 城市规划 、 煤矿区地质环境动态监测等各大领域中已 经得到了广泛的应用 . 3.1 激光雷达在军事方面的应用
主动式激光雷达用于军事成像侦察有显著的优越性 , 它不仅可以获取目标及周围地区清晰的图 像 , 而且还可以获得运动物体的速度和方向 , 某些波段的激光雷达还能够侦察隐蔽目标 .在军事应用 方面 , 激光雷达主要有以下应用 :
DO I :10.16186/j .cnki .1673 -9787.2009.05.021
第 28卷第 2009年 1
5期 0月
JOURNALOFHENA河N南PO理LY工T大EC学HN学IC报UN(自IVE然R科SI学TY版()NATURALSCIENCE)
Vol.28 No.5 Oct.2 009
ai, bi, ci.对共线条件方程式的积分 , 可以计算出 X, Y和 Z轴的方向中误差 . 通过对中误差的分析可知 , 不同点的定位精度是不同的 , 定位精度随 θ角的增加而减少 , 且 s增
大时 , 精度降低 .实际过程中 , 通常可设定一些参数为定值 , 这样可以减少测量和简化计算过程 .
第 5期 陈利 , 等 :激光 雷达技术及其应用
(1)用于巡航导弹的研制和导航 .美国休斯公司 、 通用动力公司和麦 .道公司联合为巡航导弹 生产激光雷达 、 制导系统 、 地形匹配系统 .他们宣称 : “激光雷达能改善现有和未来的巡航导弹的目 标瞄准功能 ”, 从而大大提高巡航导弹的生存能力 [ 12] .
(2)用于测距 .它能提供不同目标的特征信息 , 从而区分大到车辆 , 小到人员的各种目标 、 尺 寸 ;能对目标成像 , 且分辨率很高 ;能给机载武器发射系统提供目标距离 , 并选择目标的瞄准点 .
(1)大气污染物分布监测 .低空中存在的大量气溶胶是造成大气污染的主要因素 , 激光雷达发 出的激光与这些粒子作用时会发生米氏散射 , 米氏散射激光雷达根据这一性质完成气溶胶浓度 、 空间 分布及能见度的测定 [ 14] .
(2)大气成分观测 .差分吸收激光雷达的主要作用是大气成分的测定 .其测量原理是使激光雷 达发射出两种不等波长的光 , 其中一个波长调制到与待测物质的吸收波段内 , 另一波长调制到吸收系 数小的边翼 , 然后以高重复频率将这两种波长交替发射到大气中 , 通过分析两者波长的回波信号便可 得到待测对象的浓度分布 , 从而达到测量目的 [ 15] .
1 激光雷达的发展过程
第 1代激光雷达于 1967年由美国国际电话和电报公司研制 , 用于开发航天飞行器交会对接用的
收稿日期 :2009 -08 -12
*
作者简介 :陈利 , (1967 -), 男 , 陕西西安人 , 高级工程师 , 长期从事空间数据生产与地理息系统开发工作 . E-mail:trkj@
b1 =cosφsinκ, b2 =coswsinκ, b3 =-sinω;
c1 =sinφcosκ-cosφsinωsinκ, c2 =-sinφsinκ+cosφsinωcosκ, c3 =-cosφcosω. 可以通过 DGPS动态测定中心发射中心坐标 , INS测得姿态参数 , 这样就可以 计算出旋转矩阵
2 激光测量系统的几何模型
LiDAR系统是一种活动装置 , 由于激光脉冲不易受阴影和太阳角度影响 , 从而提高了数据采集的
质量不受航高的限制 ;由于应用多光束返回采集高程 , 数据密度大 , 大大提高了正射影像校正的精度
要求 .
2.1 激光雷达测量原理
探测回波强度的激光雷达当发射光与接收光的波长不变时 , 从距离 R处返回的光信号的功率为
Abstract:Firstlythispaperestablishesthegeometricalmodelandthemodelofestimatingprecisionbasedon collinearequation.ThenthedevelopmentandapplicationofLidarinmilitary, weather, stlythedevelopmentdirectionofLidarispredicted.
Keywords:LiDAR;collinearequation;geometricalmodel;application
0 引 言
20世纪 60年代初出现了以测距为主要功能的激光雷达 (LiDAR), 它以高角分辨率 、 高速度分 辨率 、 高距离分辨率 、 强抗干扰能力 、 良好的隐蔽性 , 以及出色的全天候工作能力在很多领域尤其是 军事领域中得到了广泛的应用 [ 3] .LiDAR技术 (LightDetectionAndRanging)也称机载激光雷达 , 它 是一种安装在飞机上的机载激光系统 , 通过量测地面的三维坐标 , 生成 LiDAR数据影像 , 经过相关 软件处理后 , 可以生成地面的 DEM模型 、 等值线图及 DOM正射影像图 .LiDAR系统通过扫描装置 , 沿航线采集地面点三维数据 ;系统可自动调节航带宽度 , 使其与航摄宽度精确匹配 , 在不同的实地条 件下 , 平面精度可达 0.1 m, 采样间隔为 2 ~ 12 m.LiDAR是集激光技术 、 光学技术和微弱信号技术 于一体而发展起来的一种现代化光学遥感手段 , 它使用激光作为探测波段 , 波长较短而且是单色相干 光 , 因而呈现出极高的分辨本领和抗干扰能力 , 为其在各方面的应用奠定了重要基础 .LiDAR探测技 术不仅可以获得目标地物表面的反射能量的大小 , 同时还可获取目标反射波谱的幅度 、 频率和相位等 信息 , 用于测速和识别移动目标 , 在环境 、 生态 、 通信 、 航天等方面有着广泛的应用 .本文重点介绍 LiDAR的技术现状和应用领域 .
关 键 词 :激光雷达 ;共线方程 ;几何模型 ;应用 中图分类号 :P627 文献标识码 :A 文章编号 :1673 -9787 (2009)05 -0583 -04
LiDARtechnologyanditsapplication
CHENLi, JIAYou, ZHANGEr-yan
(ShanxiTian-runScienceandTechnologyInc, Xian 710054, China)
2003年 1月 13日 , 美国宇航局 (NASA)成功发射了 “激光高度计试验卫星 ” (ICESat)[ 18] .这 是一颗试验型激光高度计卫星 , 装载一台地球科学激光高度计系统 (GLAS).GLAS是新型的星载激 光高度计 , 其工作方式是 :脉冲波 、 非多普勒 、 非相干和点光束 .激光斑点对应实地大小为 70 m, 间隔为 170 m, 其高程精度可望达到米级 , 能精确测量冰面特征 、 冰层厚度 , 可制作较大比例尺的冰 盖拓扑图 .GLAS进行陆地高程测量比较直观 , 不需要进行像对配准 , 地面处理也较简单 , 测量精度
Pr(R)=P0 KArqσ(R)T2 (R)Y(R)R12 +Pb,
式中 :Pr (R)是探测到的回波功率 ;P0 为发射的激光强度 ;K为接收系统的效率 ;Ar是收集器的光 疃面积 ;q是脉冲周期的一半 ;σ (R)为后向散射系数 ;T(R)是大气透过率 ;Y(R)是几何学效
率 ;Pb为背景光噪声 . 接收到的反射光经光电探测器转换为电信号 , 再通过 A/D转换后作为数字量输入到计算机进行