军用与民用设备自动调平系统进行研究
自动调平原理

自动调平原理
自动调平原理是指在机器人或自动化设备中,通过传感器检测到工作平面的不平整度,然后通过控制系统自动调整工作平面的水平度,以保证设备的正常运行和工作效率。
这一原理在现代工业生产中得到了广泛应用,成为了自动化生产的重要组成部分。
自动调平原理的实现需要依靠传感器和控制系统两个部分。
传感器可以检测到工作平面的不平整度,例如倾斜、高低差等,然后将这些信息传输给控制系统。
控制系统根据传感器的反馈信息,通过电机或液压系统等方式,自动调整工作平面的水平度,以达到最佳的工作状态。
自动调平原理的应用范围非常广泛,例如在机器人的运动控制中,自动调平可以保证机器人在不同的工作场景中都能够保持稳定的姿态,从而提高机器人的工作效率和精度。
在自动化生产线中,自动调平可以保证生产线上的各个工作站都能够保持水平,从而保证产品的质量和生产效率。
除了工业生产领域,自动调平原理还可以应用于其他领域。
例如在航空航天领域,自动调平可以保证飞机在飞行过程中保持平稳的姿态,从而提高飞行的安全性和舒适性。
在建筑领域,自动调平可以保证建筑物的地基和结构保持平稳,从而提高建筑物的稳定性和安全性。
自动调平原理是现代工业生产和其他领域中不可或缺的一部分。
它可以通过传感器和控制系统的协作,自动调整工作平面的水平度,从而提高设备的工作效率和精度,保证产品的质量和生产效率,提高生产线的稳定性和安全性。
随着科技的不断发展,自动调平原理将会得到更广泛的应用和发展。
快速多功能综合作业车自动调平功能研究
刚性 支撑 作用 的油 缸 , 所 以本 自动调 平 系统将 在 此基
础上 对液 压部 分进 行改进 , 以实现 自动 调平 功能 。
1 . 3 自动 调 平功 能实现 的 设想
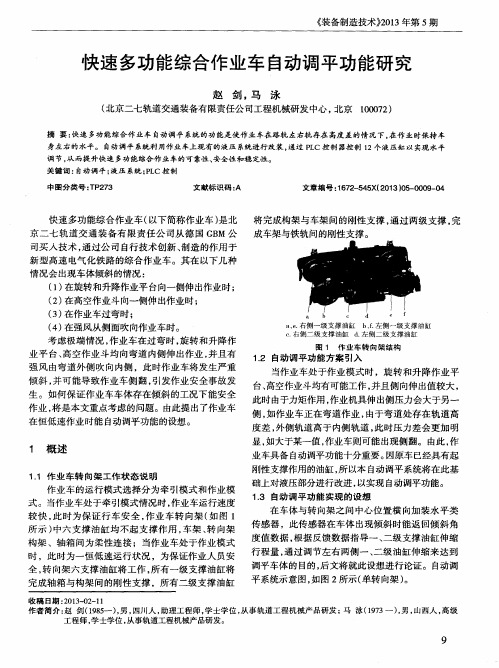
a 、 c.ຫໍສະໝຸດ 右侧 一级 支撑油缸 b 、 f . 左侧一级 支撑 油缸 右侧二级支撑油缸 d . 左侧 二级支撑油缸 图 1 作 业 车 转 向 架 结 构
1 . 2 自动调 平 功能 方案 引入
当作业车处于作业模式时 ,旋转和升降作业平
台、 高空作业斗均有可能工作 , 并且侧向伸出值较大 , 生 。如何保证作业车车体存在倾斜 的工况下能安全 此时 由于力矩作用 , 作业机具伸 出侧压力会大于另一 作业 , 将是 本 文重 点考 虑 的 问题 。由此 提 出 了作 业车 侧, 如作业车正在弯道作业 , 由于弯道处存在轨道高 在 恒低 速 作业 时 能 自动调 平功 能 的设 想 。 度差 , 外 侧 轨 道高 于 内侧 轨 道 , 此 时 压 力差 会 更 加 明 显, 如大于某一值 , 作业车则可能出现侧翻。由此 , 作 1 概 述 业 车具备 自动调平 功能 十分重 要 。 因原 车 已经具 有起
图2 自动调 平 系统 示 意 图
1 。 4 使 用 环境
根据前文 的描述 ,可以看 出调平 系统主要作用 的环 境 为 : 当作 业 车 正处 于 作业 模 式 , 且作 业 车 正在 过弯 , 且旋转 和升降作业平台、 高空作业斗两种作业 机具均伸 向弯道内侧时 ,此时如作业车倾斜角度大 于某 一值 , 调平 系 统将 开始 作用 。 两 级 自动 调 平 系 统作 用 于 转 向架 轴 箱 与 构架 、 构 架 与 车体 之间 。
自动调平原理
自动调平原理一、引言自动调平是指通过使用传感器和控制器,对机器或设备进行自动调整,使其达到水平状态的一种技术。
自动调平技术广泛应用于各种机械设备,如工业机器人、无人驾驶车辆、航天器等。
本文将介绍自动调平的原理及其在不同领域的应用。
二、自动调平原理自动调平的原理是基于反馈控制系统。
首先,通过传感器获取设备的倾斜角度和位置信息。
然后,将这些信息输入到控制器中进行处理。
控制器根据设定的目标值和当前的倾斜角度,计算出需要调整的控制量。
最后,控制器通过执行器对设备进行调整,使其达到水平状态。
三、自动调平的应用1. 工业机器人工业机器人是自动调平技术的典型应用之一。
在工业生产中,机器人通常需要在不同的工作台上进行操作。
由于工作台的高度和表面不均匀性,机器人可能会出现倾斜。
通过自动调平技术,机器人可以根据传感器反馈的倾斜信息,调整自身姿态,确保在不同的工作台上能够准确执行任务。
2. 无人驾驶车辆无人驾驶车辆是自动调平技术的另一个重要应用领域。
在行驶过程中,车辆可能会遇到不同的道路条件,如坡度、颠簸等。
通过使用传感器获取车辆的倾斜信息,控制器可以及时调整车辆的悬挂系统,使其保持水平状态,提高行驶的稳定性和安全性。
3. 航天器航天器是自动调平技术的高度应用领域之一。
在航天任务中,航天器往往需要在不同的天体上着陆和工作。
由于天体的表面不平坦,航天器可能会出现倾斜。
通过自动调平技术,航天器可以根据传感器反馈的倾斜信息,调整姿态控制系统,确保在天体表面能够稳定着陆和工作。
四、自动调平的优势1. 提高工作效率:自动调平技术可以使设备在不同的工作环境中保持水平状态,提高工作效率和准确性。
2. 提高安全性:通过自动调平技术,可以减少设备的倾斜和晃动,提高设备的稳定性和安全性。
3. 减少人工干预:自动调平技术可以减少对人工调整的依赖,降低操作的难度和风险。
4. 节约成本:自动调平技术可以减少设备的维护和调整成本,提高设备的使用寿命。
地面自动调平施工技术

地面自动调平施工技术概述地面自动调平施工技术是一种用于修复或改善地面平整度的先进技术。
它通过使用自动化设备和精确的控制系统,能够快速、精确地检测并纠正地面的不平坦问题,提高道路、停车场、机场跑道等地面的平整程度。
施工流程地面自动调平施工技术的施工流程包括以下几个关键步骤:1. 检测:首先需要使用激光或其他精确的测量仪器来检测地面的平整度。
这些仪器能够快速准确地识别地面高低差异,形成数字化的地面平整度数据。
2. 分析:在获得地面平整度数据后,需要进行进一步的分析。
通过分析地面的不平坦情况,可以确定哪些区域需要进行自动调平施工,以及采取何种措施来使地面更加平整。
3. 调平:根据分析结果,使用自动化设备进行地面的实际调平工作。
这些设备具有精确的控制系统,能够根据地面平整度数据进行自动控制,快速准确地进行调平操作。
调平操作通常包括填充或削减地面,以达到期望的平整度。
4. 检验:施工完成后,需要再次进行检测来验证地面的平整度是否满足要求。
如果发现问题,可以进行修正或重新施工。
优势地面自动调平施工技术具有以下优势:1. 快速准确:相比传统的人工调平方法,自动调平技术能够更快速、更准确地进行地面修复和改善。
它能够在短时间内完成大面积的调平工作。
2. 规范一致:通过使用自动化设备和精确的控制系统,可以确保施工过程中的调平质量一致性。
这有助于提高整体施工效率和地面平整度的稳定性。
3. 成本效益:自动调平技术的使用可以减少人工工作量和材料浪费,从而降低施工成本。
同时,它还可以减少施工时间,提高施工效率。
4. 应用广泛:地面自动调平施工技术可以应用于各类地面平整度修复和改善场景,包括道路、停车场、机场跑道等。
它适用于各种地面类型和尺寸。
总结地面自动调平施工技术是一种先进且经济高效的地面施工技术。
通过使用自动化设备和精确的控制系统,它能够快速、精确地提高地面平整度。
这一技术在各种地面修复和改善场景中具有广泛的应用前景。
测控装备自动调平修正系统设计与实现
作 。 据采集 板 内部装有充 电电池 , 数 使用 时不需要 接电 , 方便了系统在外场 的使用。数据采集板 选用
一
22 3 数字信号 , 输入到笔记本 电脑 中: 利用数学公式
2 0 年 1 月 1 日收 到 O6 O 3
备 自动调 平 修 正 系统 可 以 实现 快 速调 平 的 同时 , 还
区
:
: :
瞄二 橱
; :
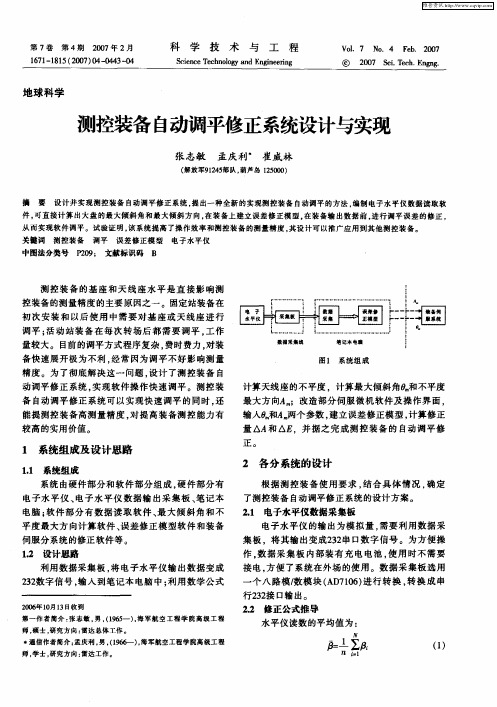
图 1 系 统 组 成
计算天线座的不平度 ,计算最大倾斜角 和不平度
能提测控装备高测量精度 , 对提高装备测控能力有 较高的实用价值 。
最大方向A ;改造部分何服微机软件及操作界面 , 输入 和A 两个 参数 , 建立 误差 修 正模 型 , 算 修正 计
量 AA和 △E.并 据 之 完 成 测 控 装 备 的 自动 调 平 修
正。
1 系统组成 及设计思路
11 系统 组成 .
2 各分 系统的设计
根据测控装备使用要求 , 结合具 体情况 , 确定 了测控 装备 自动 调平 修 正 系统 的设计 方 案 。 21 电子水平仪数据采集板 . 电子水平仪的输 出为模拟量 , 需要利用数据采
误差修正模型 电子水平仪 B
中图法分类号
P o ; 文献标识码 29
测 控 装 备 的基 座 和 天 线 座 水 平 是 直 接 影 响测 控 装备 的测 量精 度 的 主要 原 因之一 。固定 站装 备在 初 次 安装 和 以后 使 用 中 需 要 对 基 座 或 天 线 座 进 行
第 7卷
第 4期
2 0 年 2月 07
科
中华人民共和国国家军用标准GJB1037A-2004

GJB 1037A-2004单轴轴摆式伺线加速度计试验方法1 范围本标准适用于陆、海、空、天等各种载体的惯性导航、惯性制导和调平系统中所使用的各种非陀螺单轴摆式伺服加速度计(以下简称加速度计)的试验。
其他类型的加速度计如振梁加速度计、线位移加速度计、微机械加速计等可参考使用。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可以使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GJB 151 军用设备和分系统电磁发射和敏感度要求GJB 151 军用设备和分系统电磁发射和敏感度测量IEEE Std 836-2001 线加速度计精密离心机试验规范3 术语和定义下列术语和定义适用于本标准。
3.1艾伦方差Allan variance表示一个时间上连续的数据系列其相邻数据组对平均时间的平均方差。
而术语“艾伦方差”更确切的叫法应是“艾伦方差的平方根”。
3.2功率谱密度PSD用来表示作为正负频率函数的加速度计输出噪声的方差,以g2/Hz表示。
通常用数据的快速傅立叶变换(FFT)整体的或频率的幅值平方的平均值来计算。
3.3自旋修正系数spin correction coefficient当加速度计绕平行于输入基准轴且通过其角速度有效质心作用有角速度时,加速度计输出的偏值变化与角速度平方之间的比例系数。
4加速度计模型方程4.1 加速度计基准轴加速度计输入基准轴(IA),摆基准轴(PA)和输出基准轴(OA)的方向用右手定则确定,如图1所示。
用矢量式可表示为:图1 加速度计的基准轴4.2 模型方程加速度计的模型方程是表达加速度计的输出E 与沿加速度计基准轴作用的加速度、角速度之间的数学关系式,见公式(1)~(3):式(1)~(3)中:''111022{()(1())K K i i i oq i i E K K sign a sign a a k a a 2323o p p o ip i p i i k a k a a a k a a .22.}io i o po p o pp oo spin i p ang accel o p o k a a k a a k a k a k k ………………………….(1) [()]/spin i p c k j j pr p ………………………………………………………...…(2) .[()]/ang accel o c k j pr p ……………………………………………..……………..(3) E——加速度计输出,输出单位为伏特(V )、毫安(mA )、脉冲数每秒(s -1)等;K 1——标度因数,单位为伏特每重力加速度(V/g )、毫安每重力加速度(mA/g )、脉冲数/秒每重力加速度(s -1/g )等;K 0——偏值,单位为重力加速度(g );K ’o ——偏值不对称性,单位为重力加速度(g );K ’1——标度因数不对称性;a i ,a p ,a o ——分别为沿IA ,PA和OA 轴作用的加速度,单位为重力加速度(g ); +1,a 1>0;sign(a i )—符号函数,为 -1, a 1<0;0,a 1=0K 2——二阶非线性系数,单位为重力加速度每平方重力加速度(g/g 2); K 3——三阶非线性系数,单位为重力加速度每平方重力加速度(g/g 3);δ0——输入轴相对于输入基准轴IA 绕输出基准轴OA 的安装误差,单位为弧度(rad ); δp ——输入轴相对于输入基准轴IA 绕摆基准轴PA 的安装误差,单位为弧度(rad );Kip 、Kio 、Kpo——交叉耦合系数,单位为重力加速度每平方重力加速度(g/g 2); K PP 、K OO ——交叉轴非线性系数,单位为重力加速度每立方重力加速度(g/g 3);K spin ——自旋修正系数,单位为重力加速度弧度每秒的平方(g/(rad/s)2);K ang.accel ——角加速度系数,单位为重力加速度每弧度每秒的平方(g/(rad/s)2);ωi 、ωp 、ωo ——分别为沿IA ,PA 和OA 轴作用的角速度分量,单位为弧度每秒(rad/s ); J I 、J P 、J O ——摆相对于支承中心的转动惯量,单位为克厘米平方(g·cm 2);输入基准轴(IA )输出基准轴(OA )摆基准轴(PA )p——摆性,等于摆的质量乘以摆的质心到支承中心的距离,单位为克厘米(g·cm);r c——从支承中心到假设的输入加速度在摆上的作用点之间的距离,单位为厘米(cm);——噪声和非模型化等误差,单位为重力加速度(g)。
高空作业车自动调平系统的研究
4 结语
ET2402N F 型高空作业车的调平系统在整个系统结构和安全 方面都比以往调平系统有很大的改善 ,目前国内应用此调平系统 的较少 ,本文可为高空作业车调平系统的研究设计提供参考 。 参考文献 : [ 1 ] 胡 元. 高空作业车工作平台调平机构 [J ] . 工程机械 ,2006
(12) :31232. [2 ] 董大为. Simon2Cella 高空作业车的自动调平机构 [J ] . 筑路
标 ,对于这种情况 ,我们只能针对性的采取措施 。
4. 1 施工便道坡度设计合理
如果坡度太大造成车辆在上坡时用最低挡轰油上 ,而下坡时 又拼命刹车 ,造成车辆损坏和油料超耗 。如果个别车辆由于坡度 太大而中途停车再起动造成油耗会更大 。
4. 2 施工便道平整整齐
施工便道应该有相应的宽度和平整度保障 ,若宽度不够则极 易出现堵车或让车的情况 ,这时起步停车造成的油耗就会增加 ,如 果便道上出现过大坑除造成堵车外 ,车辆过坑也会造成油耗的增加。
4 改善施工便道路况
据专家估计 ,在普通路况下行车要比在试验场行车增加油耗 20 %。毫无疑问 ,城市里行车对油耗影响最大的是道路拥堵造成 的频繁起步停车 。而我们工程机械的行驶路况则要远比试验场 困难的多 ,复杂的多 。所以说 ,保证道路畅通和平整不翻浆是降 低机械油耗的一个重要环节 。
我们的车辆常年在工地便道上施工 ,工程施工便道一般都比 较简易 ,机械车辆不可能达到经济时速 。所以 ,油耗肯定会大超
Key words : machinery vehicle , oil consumption , engineering cost , oil2saving measure
收稿日期 :2008205231 作者简介 :高崇金 (19832 ) ,男 ,中南林业科技大学机电工程学院硕士研究生 ,湖南 长沙 410004
基于PLC自动调平说明书
摘要为了提高车载天线系统的机动性,提出了一种车载平台的快速调平系统。
该系统在保证调平精度的同时实现快速反应。
文章首先根据自动调平的控制要求,通过对驱动方式、支撑方式、调平方法等多方面的分析,确定了系统的总体方案,提出了“循环多次调平”的策略,以简化调平过程,降低“虚腿”的出现,接着设计了基于PLC的调平硬件电路,在保证调平过程符合精度要求的同时对系统的扩展模块进行了优化选择,最后在分析研究调平策略的基础上,设计了PLC的程序。
该方案的设计研究为其他相关系统的设计提供了参考。
关键词:自动调平控制系统;调平策略;PLCAbstractIn order to improve the vehicle antenna system maneuverability, the fast leveling system of a vehicle platform is proposed. The system can ensure the leveling precision and quick response. Firstly, according to the automatic leveling control requirements, the drive mode, support and leveling method are analyzed. The overall scheme is determined. The paper proposes a "recycling repeated leveling" strategy, in order to simplify the leveling process and reduce the "leg". Then the leveling the hardware circuit based on PLC is designed. The extension module of the system is optimized. Based on analysis of the adjustment strategy, the PLC program is designed. The paper provides a reference design for other related systems.Keywords: automatic leveling control system; leveling strategy; PLC目录1 前言 (1)1.1课题的背景及来源 (1)1.2发展现状及趋势 (1)1.3论文的主要研究内容 (2)2 系统的总体设计 (4)2.1系统控制要求与主要工作方式 (4)2.2系统总体方案的对比与选择 (5)2.2.1驱动系统的选择 (5)2.2.2主控制器的选择 (5)2.2.3自动调平控制系统的支撑 (6)3 系统机械部分的设计 (9)3.1系统的机械构成 (9)3.2系统机械各部件的选择 (11)3.2.1滚珠丝杠的选择 (11)3.2.2电机的选择 (14)3.2.3双轴倾角传感器 (15)3.2.4接近传感器 (16)4 系统硬件电路的设计 (18)4.1 控制系统总体设计 (18)4.2 系统各个模块的分析 (20)5 调平控制系统的调平策略 (23)5.1 循环多次调平 (23)5.2 预支撑子系统 (26)5.3 粗、精调平 (26)5.4 确定最高点和计算支腿移动量 (26)5.5 PID控制算法简介 (28)6 系统程序的设计 (31)6.1信号接收模块 (32)6.2预支撑 (32)6.3确定平台最高点 (33)6.4计算支腿移动量 (35)6.5粗精调平 (36)结论 (38)总结与体会 (39)致谢 (40)参考文献 (41)附录1系统机械结构图 (42)附录2系统电气原理图 (44)附录3系统PLC程序 (45)1 前言1.1课题的背景及来源随着科技的进步,以及国内外严峻的军事形势和国防技术的发展,越来越多的军用设备需要根据任务需求,随时变更工作地点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
军用与民用设备自动调平系统研究研究目的本论文是怎对现代高科技条件下的各种场合,对许多军用与民用设备自动调平系统进行研究。
许多军用与民用设备正常工作是都需要一个高精度的水平平台,例如车载雷达,自行火炮,静力压桩机,重型车辆等。
对平台水平度的调节是这些设备正常就位工作极重要的一环,因此提高重型车辆,军用设备,以及高空作业平台的机动性,缩短它们工作前的预调整时间提高它们的调平精度及工作的可靠性,是非常有必要的。
研究意义随着我国经济,国防等各方面飞速发展,平台调平也与越来越受到重视,平台调平系统的研究越来越深入,这就需要我们不断地完善平台调平系统来为更多的设备服务。
平台调平系统是解决现有的调平系统在调平时不能用偶小地进行调平或是调平不准确从而使工作生产产生不能有效率的进行的一种调平技术。
本设计是基于电液控制的调平系统。
国内外研究现状分析国内的军用民用调平设备起步较晚,所以这些设备主要采用的都是手动调整螺杆货液压千斤顶,通过目测气泡水平仪,由多人反复操作调节各螺杆支腿达到水平,近年来,这些设备都采用了自动调平系统,主要有机械式调平系统,和电液调平系统,这样大大缩短了调平时间。
我国目前的液压调平系统是通过芯片PLC或是单片机来实现功能的。
而国际上对液压自动调平系统研究都有了属于自己的准用芯片,它们在机械工作精度上,自动化程度上和系统响应速度都已经达到了很高的程度。
现在液压自动调平系统一种比较先进的方法是采用NIOS II嵌入式处理器来实现液压自动调平系统工作的。
中国电子科技集团公司第14研究所研制的某高机动雷达车采用的液压调平系统,采用了搞灵敏度,搞精度的遂平传感器作为水平误差的检测反馈原件,实现了闭环调节。
3分钟内精度可达到0.05°以内。
华东电子工程研究所面向模块化技术制作的机电式自动调平装置,该装置使用滚珠丝杠传动,搞功率晶体管模块驱动,双轴液体摆平和传感器等先进技术,精度可达0.05°以内,调平时间2分钟。
本文主要研究工作研发民用自动调平系统有一系列的关键技术问题。
需呀解决包括设计方案、控制策略,结构设计、仿真分析等问题。
本文只对该课题进行预先的初步研究,并做了以下几个方面的工作。
1)查阅了大量的国内外有关电液控制的调平系统的文献资料,了解国内外的发展状况和最新技术水晶瓶的基础上,分析并总结国内外的成功研发经验,比较了各方案的优缺点并结合本课题的实际情况拟定了自动调平系统的总体方案。
2)调平系统设计:对调平过程进行了分析与建模,对解耦方法和水平误差度进行了探讨,提出了可行的调平方案,设计了调平系统。
总体研究方案总体技术要求调平系统技术要求可移动载体,例如车载雷达,无线发射架,重型车辆等设备到达指定位置后,要求快速架设精确的水平基准。
车载自动调平系统平台必须满足以下要求:1)在移动状态下车载自动调平系统平台由载车运载进入工作状态时,平台由支撑系统支撑。
2)电液自动调平系统平台应在一定时间内(小于4分钟调平,并满足调平范围在4°,精度在0.5°)3)自动调平系统平台一旦调平后,应该对其位置进行锁定,保证平台上精密装置正常工作。
4)当车载自动调平系统平台偏离水平状态时,应及时进行调平,满足车载自动调平系统平台要求。
5)当车载自动调平系统平台进入移动状态时,其支撑脚能快速升起。
其它要求在设计系统方案是,除了上述技术上的要求外,还应考虑系统的稳定性,可靠性,可维护性,安全性以及效率等问题。
当然了除了上要求外还应考虑到调平系统本身结构问题1)支腿的刚强度问题。
2)元器件连接问题。
3)使用性问题。
4)经济性问题。
调平系统基本方案目前在车体水平调节系统中,主要使用液压驱动和机电驱动进行调平。
在选择方案时不仅呀考虑对调平时间的要求,还必须注意平台的稳定性。
这两种调平方法,使用电液控制的调平方案是使用最多的一种,其主要原因是电液控制的调平系统具有工作平稳、体积小、驱动力大、反应快、结构紧凑以及控制方便等优点。
如果一个机电系统能够驱动14~24kg在和,那么相同体积的电液控制系统则可以驱动100~140kg的在和,而且还有与机电系统相当的精度和响应速度。
电液驱动机构可得到很大的速度范围,其低俗性能比电动机好;电液系统定位刚度较大,位置误差小;液压缸是直线位移驱动机构,其运动与支腿要求的运动相吻合,能够获得较高的控制性能。
采用电液控制调平它有以下优点;1)调平时间短2)调平精度高3)可靠性好4)便于维护等。
由于系统平台在调平后,要求对其位置进行锁定来保证平台上的精密装置正常工作。
机电控制系统采用的丝杠螺母副可以有可靠的自锁,而电液调平由于泄露问题,则是需要设置机械缩合专门的高压解锁呼噜,增加了成本和调整时间。
由此可见,电液控制系统和机电控制系统都有各自的优缺点和使用范围,但是从功率、结构和控制精度方面来看,大吨位载荷的平台控制采用电液私服并联机构驱动最为合适。
根据本项目的特点,选用电液驱动的方式进行调平。
调平系统调平系统由检测、执行机构和控制系统3部分组成,具体包括双轴水平传感器、阀控液压缸以及可编程控制器PLC。
1)检测装置为角度检测器,用来检测平台左右以及前后的不平度。
其检测值得大小是系统判断是否进行调平的重要依据,其检测的精度的高低直接决定了系统的最终调平精度直接决定了系统最终调平精度。
2)调平执行机构采用的是4个带有自锁功能的液压支腿,将其对称布置在平台的两侧,由响应的电液伺服阀控制,通过支腿的上下伸缩,实现平台的调平。
3)控制系统是自动调平系统的核心组成部分,常见的有计算机控制盒可编程控制住两种形式。
由于平台上不便放置计算机,而PLC具有高的可靠性和接口简易性,在这里我们选用PLC作为控制器,通过软件编程控制调平机构动作,实现平台的自动调平。
(图1)【车载雷达电液自动调平】调平系统要解决的4个问题:①支撑方案目前调平系统的支撑方案有几种,三点支撑、四点支撑、六点支撑等。
三点支撑调平相对容易,缺点是抗乞丐服能力差,必须增大支撑跨距以提高情妇能力;四点、六点调平支撑可靠性强,抗欺负能力强,但是存在静不定问题,容易产生“虚腿”,静不定次数越高,系统越复杂。
从可靠性和成本上来考虑,本系统采用了四点支撑调平法。
②动力驱动方案考虑到风载方向不确定性,本系统的支撑跨距设计为10m x 2m,单腿最大承载能力为10t。
动力驱动有私服电机和液压驱动两种方式,私服电机驱动一般需要加减速器,,同样的承载能下机构的尺寸大雨液压系统机构尺寸,一般用于单腿承载能力为7t以下的调平系统,低温环境下(-40℃)系统成本会出现成倍增加的趋势。
而液压系统具有驱动力大、工作平稳、反应快、体积小、结构紧凑、控制方便等优点。
所以本系统采用了液压缸作为动力驱动元件实现平台的调平。
③虚腿问题4点和多点支撑调平面临的主要问题是虚腿现象,即有一个支腿不受力或是悬空。
这种现象会对这整个设备运行的安全性和稳定性造成巨大的隐患。
当平台的负载均匀时,4个支撑点的手里应该均匀。
目前的调平方式为了避免虚腿问题,采用的是向最高支撑靠拢的方法。
这个方法在后面会有详解。
④调平后的锁紧问题系统调平后,液压缸停止工作时需要被锁定,即在外服在作用下无位移。
对要求高的系统,传统的方法是设计锁紧回路,但是执行元件的额内泄漏是无法解决的。
对于要求高的系统,如导弹发射车、雷达天线车以及其他战备系统,则是需要设计特殊具有机械锁定装置的液压缸。
为了进行有效地锁紧,比较好的做法是液压锁紧回路和机械锁定装置两个一起用,下面介绍几种常用的机械锁定装置:1)刹片式锁紧装置在液压缸的端盖上有一制动刹片1,它在碟形弹簧2的作用下被紧紧压在活塞杆3上,依靠摩擦力抵消轴向负载力,从而使活塞杆锁紧在任意位置上,当解锁压力油进入A腔,在液压力作用下,讲制动刹片顶起,使之脱离活塞杆,达到解锁的目的。
当油压卸去后,又能自动锁紧。
2)内涨式锁紧缸活塞1和缸体2之间采用过盈配合产生巨大锁紧力,当工作是,解锁高压油从解锁油口a,经导管内孔b,最终达到活塞与缸体之间,使缸体膨胀,实现解锁。
3)套筒式锁紧装置液压缸的前端盖上带个锁紧套筒1,它与活塞杆2过盈配合,且此套筒用一定的弹性材料制成,因此可使活塞杆所in在任意位置。
当解锁高压油进入痛啊痛后,在压力油作用下,径向膨胀产生间隙,使活塞移动。
针对上述几种方案,我们选定套筒式锁紧装置,这种装置安装简单,具有很强可操作性。
调平方法调平过程分为两个阶段:第一个阶段为落地检测。
系统通电后,操作人员只需要按操作面板上的“调平”键,控制系统驱动支撑腿伸出,同事根据压力传感器数值判断各支腿是否着地,当某一支腿着地后该腿停止动作。
当4根支腿全部着地后,落地检测结束,进入调平阶段。
第二阶段为调平阶段。
调平系统采用电液伺服阀控制,可以单独控制每个支腿的升降速度。
控制系统根据水平传感器的判定平台的倾斜情况。
高腿不动,其他3腿以和其距水平平面的距离成线性关系的速度同时之气,直到水平度达到平台系统的要求。
平台支撑示意图调平技术调节一个平面到达水平状态的调节过程可以有单向调节和多点调节两种方案。
若采用多点调节,即各点都同时运动,调整到一个预定的点,其有点事调节速度快,但由于4点支撑的工作台面是刚性结构,其平衡处于静不定状态,多点调节时因每个支撑腿的位移、速度均不相同,4个支撑腿的运动相互干涉耦合,具体控制算法比较复杂,且每个支撑腿的受力不均易发生伺服电机过载。
曹永单向调节,虽然调节时间稍长,但是协调性好,实际上调平过程中调节的实际上是4个点的相对高度,为了有效消除私服传动系统的反响间隙和死区的影响,减小调节误差,提高系统的调平精度,调节过程根据水平传感器的检测信号判断支撑台面的最高点,按照“只升不降”的原则,采用升调平技术,向最高点看齐,即保持相对最高点不懂,把低点调高,这样系统就只有上升运动,可有效地减小虚腿现象的产生。
架设支撑腿着地后支撑腿1为最高点(其他支撑腿为最高点的情况相似),根据水平传感器的信号,可分别进行x,y轴向的调节。
如先进行x轴的调节,其过程为支撑腿1,4不动,支撑腿2,3同时上升一定位移,即工作系统绕支撑腿1,4为轴线旋转,支撑腿2,3同时上升,上升的数值由控制系统根据水平传感器的x轴反馈值决定,直至x轴呈水平状态。
Y 轴调节与x轴调节类似。
若平台底盘的x,y轴调节成水平状态,则可认为平台已经处于水平状态。
根据平台的倾斜角度,即平台停的地面位置不是水平状态,整个调平过程分为粗调和精调,即当平台的倾斜度大于一定角度时(如倾斜度>1°),系统粗调,各个支腿的动作速度较快;当倾斜角度小于没偶个阀值时(如倾斜角度<0.5°),系统精调,各支撑腿的动作速度较慢。
调平流程在平台四条支腿全部着地后,控制系统开始进行调平,调平过程如图所示。