基于PLC的车载自动调平系统设计
车载机械自动调平机械系统设计

车载机械自动调平机械系统设计作者:李浩东来源:《科学与财富》2018年第10期摘要:车载自动调平系统是高精度车载工作平台的重要组成部分,它既实现了高精度工作平台的水平精度,又缩短了系统的调平时间。
本文介绍了车载自动调平系统的组成及功能、工作原理、优势及技术特点、现实意义及市场前景。
文中研制了可使战车高炮系统到达各种凹凸路面地点后底盘快速精确达到水平的调平系统,使战车高炮系统迅速转换为作战状态或者常规状态,确保发出精确的炮弹角度,提高系统的机动性。
关键词:自动调平;控制系统;PLC;调平系统0 引言随着国内外军事形势和国防技术的发展,越来越多的军用设备需要根据任务需求随时变更工作地点。
对于装备各种重型武器的战车,必须保证在各种恶劣的地理环境下完成精确打击,并且保证这些军用设备的机动性能。
为了确保坦克火炮的连续射击精度,采用军用卡车底盘高射炮系统。
战场地形不均匀,如果仅仅使用轮胎支撑,水平误差将直接影响射击精度,弹性效果也会影响连续射击的稳定性。
因而火炮射击时,其底盘必须处于水平状态。
当卡车到达指定地点后,利用调平系统迅速将底盘调至水平状态,这样设备才能快速进入工作,工作完成后也能迅速转移。
此举既保证了设备的正常工作,又大大提高了设备的机动性。
1.调平系统组成及功能调平系统具备以下功能:平台全升、全降,撑腿落地自动检测,撑腿行程自动反馈,撑腿过行程和过载保护,水平监测,自动调平,撑腿自动锁定、解锁,本控、遥控等。
调平系统由4套水平展开机构、4套撑腿、1套双轴水平检测器、1套温控装置、1套控制箱、1套车外操作盒、电缆组等组成。
撑腿有电液式和机电式;控制箱由PLC控制器、低压电源、操作员面板、中间继电器和保护设备等组成。
各部分作用如下1)水平展开机构:实现撑腿水平展开和收回。
2)撑腿:车载自动调平系统的执行机构。
3)可编程控制器PLC:车载自动调平系统的控制核心。
控制命令通过PLC发出,同时采集反馈信号,使各个物理量构成一个个相对独立的闭环控制系统。
基于PLC的车载平台液压自动调平系统设计

基于PLC的车载平台液压自动调平系统设计
甘志梅;寇桂岳
【期刊名称】《南昌工程学院学报》
【年(卷),期】2012(031)004
【摘要】很多车载设备需要调平后才能正常工作.以PLC为控制器、液压油缸为执行元件、双轴角度传感器作为反馈元件,采用最低腿调高法的调平策略,设计了一种车载平台的液压自动调平系统.并介绍了系统的液压系统组成及原理,控制系统硬件组成及软件实现方法.该系统调平速度快,调平精度高,能实现手动/自动调平切换且操作简单,有效提高车载平台的机动性.
【总页数】3页(P38-40)
【作者】甘志梅;寇桂岳
【作者单位】南昌工程学院机械与电气工程学院,江西南昌330099;南昌工程学院机械与电气工程学院,江西南昌330099
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于PLC控制的大载荷四点支撑液压自动调平系统设计 [J], 席广辉;王峰;皇淼淼;陶烨
2.基于PLC的车载自动调平系统设计 [J], 李志民;黄辰
3.基于PLC控制的专用液压机的液压控制系统设计 [J], 舒英利;
4.基于液压支腿的无人机自动调平液压系统设计及仿真分析 [J], 郭付
5.基于STC89C51的液压自动调平系统设计 [J], 肖克;徐世许;刘镔震;王京擘因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC自动调平说明书
摘要为了提高车载天线系统的机动性,提出了一种车载平台的快速调平系统。
该系统在保证调平精度的同时实现快速反应。
文章首先根据自动调平的控制要求,通过对驱动方式、支撑方式、调平方法等多方面的分析,确定了系统的总体方案,提出了“循环多次调平”的策略,以简化调平过程,降低“虚腿”的出现,接着设计了基于PLC的调平硬件电路,在保证调平过程符合精度要求的同时对系统的扩展模块进行了优化选择,最后在分析研究调平策略的基础上,设计了PLC的程序。
该方案的设计研究为其他相关系统的设计提供了参考。
关键词:自动调平控制系统;调平策略;PLCAbstractIn order to improve the vehicle antenna system maneuverability, the fast leveling system of a vehicle platform is proposed. The system can ensure the leveling precision and quick response. Firstly, according to the automatic leveling control requirements, the drive mode, support and leveling method are analyzed. The overall scheme is determined. The paper proposes a "recycling repeated leveling" strategy, in order to simplify the leveling process and reduce the "leg". Then the leveling the hardware circuit based on PLC is designed. The extension module of the system is optimized. Based on analysis of the adjustment strategy, the PLC program is designed. The paper provides a reference design for other related systems.Keywords: automatic leveling control system; leveling strategy; PLC目录1 前言 (1)1.1课题的背景及来源 (1)1.2发展现状及趋势 (1)1.3论文的主要研究内容 (2)2 系统的总体设计 (4)2.1系统控制要求与主要工作方式 (4)2.2系统总体方案的对比与选择 (5)2.2.1驱动系统的选择 (5)2.2.2主控制器的选择 (5)2.2.3自动调平控制系统的支撑 (6)3 系统机械部分的设计 (9)3.1系统的机械构成 (9)3.2系统机械各部件的选择 (11)3.2.1滚珠丝杠的选择 (11)3.2.2电机的选择 (14)3.2.3双轴倾角传感器 (15)3.2.4接近传感器 (16)4 系统硬件电路的设计 (18)4.1 控制系统总体设计 (18)4.2 系统各个模块的分析 (20)5 调平控制系统的调平策略 (23)5.1 循环多次调平 (23)5.2 预支撑子系统 (26)5.3 粗、精调平 (26)5.4 确定最高点和计算支腿移动量 (26)5.5 PID控制算法简介 (28)6 系统程序的设计 (31)6.1信号接收模块 (32)6.2预支撑 (32)6.3确定平台最高点 (33)6.4计算支腿移动量 (35)6.5粗精调平 (36)结论 (38)总结与体会 (39)致谢 (40)参考文献 (41)附录1系统机械结构图 (42)附录2系统电气原理图 (44)附录3系统PLC程序 (45)1 前言1.1课题的背景及来源随着科技的进步,以及国内外严峻的军事形势和国防技术的发展,越来越多的军用设备需要根据任务需求,随时变更工作地点。
小车自动往返PLC控制系统程序设计与调试.
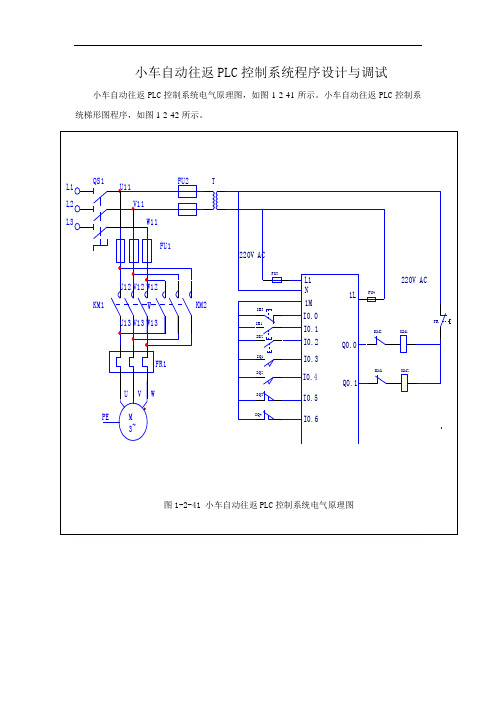
小车自动往返PLC 控制系统程序设计与调试小车自动往返PLC 控制系统电气原理图,如图1-2-41所示。
小车自动往返PLC 控制系统梯形图程序,如图1-2-42所示。
KM1KM2Q0.0Q0.11LFU4220V ACSB2SB3SQ4SQ3SQ2SQ11M L1N FRFU3I0.0I0.1I0.2I0.3I0.4I0.5220V ACFU2FR1KM1FU1M 3~QS1L3L2L1U11V11W11W12V12U12W13V13U13U V WKM2PETKM2KM1SB1I0.6图1-2-41 小车自动往返PLC 控制系统电气原理图2.系统调试(1)在教师现场监护下进行通电调试,将程序写入PLC ,验证系统功能是否符合控制要求。
(2)如果出现故障,学生应独立检修。
线路检修完毕和梯形图修改完毕应重新调试,直至系统正常工作。
3.工艺要求(1)熟悉所用电器元件的作用和控制线路的工作原理。
列出I/O 分配表,配齐所有电器元件,并检查质量。
(2)绘制元件布置图,经教师检查合格后,在控制板上安装电器元件。
电器安装应牢固,并符合工艺要求。
(3)线路安装应遵循由内到外、横平竖直的原则;尽量做到合理布线、就近走线;编码正确、齐全;接线可靠,不松动、不压皮、不反圈、不损伤线芯。
(4)安装完毕进行自检,该过程学生可使用万用表来检查线路。
要求确保无误后才允许通电调试。
图1-2-42 小车自动往返PLC 控制系统梯形图程序。
基于PLC的高空作业车自动调平系统毕业设计论文
南京工程学院自动化学院本科毕业设计(论文)题目:基于PLC的高空作业车自动调平系统Graduation Design (Thesis)The high assignment car is based on PLC automatic levelling systemByLiu feng runSupervised byProf. LIU YunxiaSchool Of AutomationNanjing Institute of TechnologyJune,2010毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
基于PLC控制的大载荷四点支撑液压自动调平系统
• 158 •基于PLC控制的大载荷四点支撑液压自动调平系统设计安徽博微长安电子有限公司 席广辉 王 峰 皇淼淼 陶 烨【摘要】液压自动调平系统的驱动力大,负载能力强,结构紧凑,适合在重型移动载体上运用。
采用液压马达(带制动器、霍尔传感器)以及双向液压锁能使液压系统得到较高的锁紧精度,同时采用四点支撑结构,抗倾覆能力强,系统操作简单、使用方便,调平速度快,能有效提高车载平台的机动性。
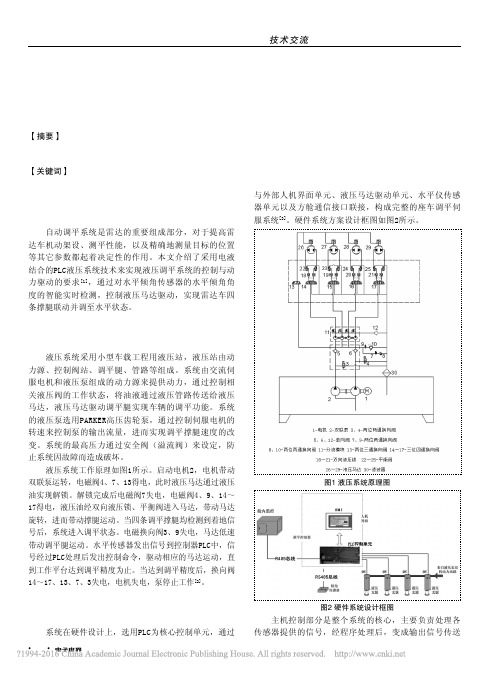
【关键词】自动调平;PLC;液压1 引言自动调平系统是雷达的重要组成部分,对于提高雷达车机动架设、测平性能,以及精确地测量目标的位置等其它参数都起着决定性的作用。
本文介绍了采用电液结合的PLC液压系统技术来实现液压调平系统的控制与动力驱动的要求[1],通过对水平倾角传感器的水平倾角角度的智能实时检测,控制液压马达驱动,实现雷达车四条撑腿联动并调至水平状态。
2 液压系统设计液压系统采用小型车载工程用液压站,液压站由动力源、控制阀站、调平腿、管路等组成。
系统由交流伺服电机和液压泵组成的动力源来提供动力,通过控制相关液压阀的工作状态,将油液通过液压管路传送给液压马达,液压马达驱动调平腿实现车辆的调平功能。
系统的液压泵选用PARKER高压齿轮泵,通过控制伺服电机的转速来控制泵的输出流量,进而实现调平撑腿速度的改变。
系统的最高压力通过安全阀(溢流阀)来设定,防止系统因故障而造成破坏。
液压系统工作原理如图1所示。
启动电机2,电机带动双联泵运转,电磁阀4、7、13得电,此时液压马达通过液压油实现解锁。
解锁完成后电磁阀7失电,电磁阀4、9、14~17得电,液压油经双向液压锁、平衡阀进入马达,带动马达旋转,进而带动撑腿运动。
当四条调平撑腿均检测到着地信号后,系统进入调平状态。
电磁换向阀3、9失电,马达低速带动调平腿运动。
水平传感器发出信号到控制器PLC中,信号经过PLC处理后发出控制命令,驱动相应的马达运动,直到工作平台达到调平精度为止。
小车自动运行控制系统(plck课程设计)

第一章概述1.1 设计背景及意义本文介绍了一种基于西门子PLC控制的生产流水线自动控制小车系统设计方案。
将PLC运用到小车自动控制系统,可实现小车的全自动控制,降低系统的运行费用。
PLC小车自动控制系统具有连线简单控制速度快,精度高,可靠性和可维护性好,维修和改造方便等优点。
利用PLC 控制技术,可实现小车相关运动,小车在一个周期内的运动由4段组成。
设小车最初在左端,当按下启动按钮,则小车自动循环地工作,若按下停止按钮,则小车完成本次循环工作后,停止在最初位置。
其运动路线示意图如下图1-1所示。
如图1-1 小车运动路线示意图第二章硬件设计2.1 主电路图如图2-1为小车循环控制的主电路原理图。
该电路图利用两个接触器的主触点KM1、KM2分别接至电机的三相电源进线中,其中相对电源的任意两相对调,即可实现电机的正反转,也可达到小车左右运行的目的。
假设接通KM1为正转(小车右行),则接通KM2为反转(小车左行)。
图2-1小车循环控制的主电路原理2.2 I/O地址分配如表2-1为小车循环运动PLC控制的I/O分配表。
在运行过程中,这些I/O口分别起到了控制各阶段的输入和输出的作用,并且也使小车的控制过程更清晰明了,动作与结果显示更加方便直接。
表2-12.3I/O接线图如图2-2为小车循环运动PLC控制的I/O接线图。
在进行调试过程时,在PLC模块上,当I0.0有输入信号,即按下SQ1;当I0.1有输入信号,也即按下SQ2,以此类推,I/O接线图就是把实际的开关信号变成调试时的输入信号。
同理,输出信号也是利用PLC模块把小车的实际运动用Q0.0、Q0.1的状态表现出来。
图2-2小车循环运动PLC控制的I/O接线图2.4元件列表如表2-2为小车循环运动PLC控制的元件列表。
在本次设计中就是利用这些元件,用若干导线连接起来组成了我们需要的原理图、I/O接线图。
第三章软件设计3.1 程序流程图如图3-1为小车循环运动PLC控制的程序流程图。
基于PLC的车载自动调平系统设计

水平传感器轴
水平传感器轴
操作员界面
着地压力1YJ
着地压力2YJ
着地压力3YJ
着地压力4YJ
着地压力5YJ
水平限位1JK
水平限位2JK
水平限位3JK
水平限位4JK
系统中通常使用可编程控制器来控制,以第一个达到最高点的支撑腿为标准,其余腿作调整。
调节
角度与预期值相差较大时
值与预期的角度相差较小时
轴水平是否自动调平?
腿2,3慢速升
轴保持不变?
轴水平电机是否过载?是否到极限位置?
轴保持不变?
是否自动调平?腿3,4慢速升
N
是否到极限位置?
电机是否过载?
图达到最高点为例画出的微调流量图中央处理单元)的详细参数为11 W 的数据存储器。
本机具有输入,16特性,允许最大的扩展块为7个布尔量运算执行时间为输入电压为,输入电流在大负载时可达水平传感器系统采用玻璃液位开关三极管共电极与两个控制用电极。
当水平面为电流,为当失去水平状态时号之间的差异度时。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的车载自动调平系统设计
作者:李志民黄辰
来源:《物联网技术》2017年第04期
摘要:车载自动调平系统是利用自动控制技术随时根据陆基面的不平整度自动调整支撑脚的垂直高度,确保车载工作平台达到理想水平平整度要求的综合自动化系统。
文中研制了可使战车高炮系统到达各种凹凸路面地点后底盘快速精确达到水平的调平系统,使战车高炮系统迅速转换为作战状态或者常规状态,确保发出精确的炮弹角度,提高系统的机动性。
关键词:自动调平;控制系统;PLC;调平系统
中图分类号:TP273 文献标识码:A 文章编号:2095-1302(2017)04-0-02
0 引言
随着国内外军事形势和国防技术的发展,越来越多的军用设备需要根据任务需求随时变更工作地点。
对于装备各种重型武器的战车,必须保证在各种恶劣的地理环境下完成精确打击,并且保证这些军用设备的机动性能。
为了确保坦克火炮的连续射击精度,采用军用卡车底盘高射炮系统。
战场地形不均匀,如果仅仅使用轮胎支撑,水平误差将直接影响射击精度,弹性效果也会影响连续射击的稳定性。
因而火炮射击时,其底盘必须处于水平状态。
当卡车到达指定地点后,利用调平系统迅速将底盘调至水平状态,这样设备才能快速进入工作,工作完成后也能迅速转移。
此举既保证了设备的正常工作,又大大提高了设备的机动性。
1 调平系统的组成
调平系统的组成如图1所示。
该系统由4套水平展开机构、4套撑腿、1套双轴水平检测器、1套温控装置、1套控制箱、1套车外操作盒、电缆组等组成。
撑腿分为电液式和机电式。
控制箱由PLC控制器、低压电源、操作员面板、中间继电器和保护设备等组成。
各部分作用如下:
(1)水平展开机构:实现撑腿水平展开和收回。
(2)撑腿:调平系统的运行单元。
(3)可编程控制器PLC:调平系统的大脑。
(4)水平传感器:用于测量夹角。
(5)撑腿到位检测和报警装置:用于检测与报警。
(6)车外操作装置:实现车内外操作。
(7)操作员面板:用于人为进行操作时的人机交互。
(8)低压电源:用于各系统各部分低压供电。
系统中通常使用可编程控制器来控制,以第一个达到最高点的支撑腿为标准,其余腿作调整。
调节X轴的方向,当角度与预期值相差较大时,增加速度,较少调整时间;当目标值与预期的角度相差较小时,减速以保证调速系统要求的精度。
在这个过程中,必须不断检测Y 轴信号,通过适当调整,确保Y轴的角度方向几乎不变。
调整Y轴方向的原理和过程相似。
图2所示为以支撑腿1达到最高点为例画出的微调流量图。
2 调平系统的硬件设计
西门子SIMATIC S7-200系列PLC主要包含一个中央处理器单元(CPU226),数字输入模块、数字量输出模块、模拟量输入模块。
是拥有高速和中等规模I/O配置的中央处理单元(CPU226),可用于中等规模和中等程序指令执行速度的程序安装;32点输入的数字输入模块运用光耦合器来与总线隔离;模拟量输入模块有两个输入和反向极性保护。
此外,模拟输入端的电平传感器电路包括集成运算放大器和相敏整流器。
因此,我们选择它作为主控元件。
中央处理单元(CPU226)的详细参数为:CPU226功耗为11 W,有10 240 B的数据存储器。
本机具有24位数字量输入,16位数字量输出的I/O特性,允许最大的扩展I/O模块为7个。
共有256个定时器,布尔量运算执行时间为0.22μs。
输入电压为20.4~28.8 V DC,输入电流在24 V DC并连接最大负载时可达1 050 mA。
水平传感器系统采用玻璃液位开关三极管,它有一个公共电极与两个控制用电极。
当水平面为0时,电极输出相同的电流,为9 mA;当失去水平状态时,相应的控制电极输出信号之间的差异;当倾斜度大于15度时,传感器饱和,此时电极的输出电流为12 mA。
系统的每只脚上设有一个液体电压力开关,用于反映各腿的情况。
其最大工作压力为350 MPa,切换频率为每分钟80次。
当支撑腿接地时,电压力开关闭合,当支撑腿离开地面时,液体的电压力开关断开。
通过电磁铁操作的直接作用完成了腿的升降运动,开关频率为15 000次/小时。
系统的硬件结构如图3所示。
3 调平系统的软件设计
该系统的软件设计将根据图4所示的工作流程展开。
本系统的软件设计采用西门子公司生产的PLC STEP7 V5.1与西门子编程软件的使用匹配。
SIMATIC STEP7 V5.1编程软件提供三种编程工具,分别为语句表(STL),功能图(FBD)和梯形图(LAD)。
根据各模块的功能,系统采用梯形图完成软件设计。
4 结语
本文阐述了自动调平系统在我们日常生活中的重要性。
并着重介绍了自动调平系统的软硬件设计。
最后简述了在系统设计过程中遇到的问题。
由于调平系统可用于各个方面,因此调平系统的优化既可造福社会,又可为企业带来可观的收益。
参考文献
[1]翁雨艳. PLC控制系统的设计方法[J].科技创新与应用,2013(30):96.
[2]姚舜才,张艳兵.基于PLC的自动调平系统[J].中北大学学报(自然科学版),2003,24(1):14-17.
[3]周春燕.基于PLC的自动调平控制系统研制[D].西安:西安电子科技大学,2010.
[4]陆作其,单春贤,赵志磊,等.车载雷达自动调平系统中虚腿的模糊控制[J].数学的实践与认识,2010,40(3):115-122.
[5]唐瑜.农机驾驶座椅自动调平系统研究[D].杨凌:西北农林科技大学,2010.
[6]常伟.沥青混凝土摊铺机自动调平电控系统[J].民营科技,2012 (1):233.
[7]耿雪樵,陈奇.海底钻机液压式自动调平系统[J].科技创新导报,2009(26):80-81.
[8]裴东,张振良,邓方刚.基于PLC的重型载车自动调平系统[J].起重运输机械,2009(3):72-74.
[9]彭建坡,李玉伟. PLC控制系统的设计方法及要点浅析[J].科技信息,2007(14):263.
[10]黎鑫溢,郭纪梅,李英智.汽车起重机支腿自动调平控制分析与策略研究[J].建筑机械,2007(13):51-54.
[11]江进国,姚志功,殷新胜,等.大型钻机自动调平原理与系统实现[J].液压与气动,2007(8):43-46.
[12]吴峰,杨俊义,雷龙,等.某车载高炮液压自动调平控制系统[J].火炮发射与控制学报,2007(1):67-72.
[13]李广伟,许新芳.机电式自动调平系统[J].兵工自动化,2013,32 (3):1-2.
[14]刘卫平,王明泉. PLC的发展和应用前景[J].机械管理开发,2009,24(5):78-80.
[15]陈晨.基于PLC的自动调平系统[D].南京:南京化工职业技术学院,2011.。