北京航空航天大学 自动控制原理2007
北航机电控制工程基础(自动控制原理)第四章2_广义根轨迹
j 1 n
si 为闭环传递函数的极点。
设输入为单位阶跃信号,r(t)=1(t),则R(s)=1/s,代入上式得,
C ( s)
袁松梅教授 Tel:82339630
K ( s z j )
*
m
(s s )
i 1 i
j 1 n
1 s
Email:yuansm@
北京航空航天大学 4.3利用根轨迹分析系统的动态性能
机电控制工程基础
Fundamentals of Mechatronic Control Engineering
The analysis of system dynamic performance using root locus
4.3.1用闭环零、极点表示的阶跃响应表达式
the qualitative relationship between Closed-loop zero and pole distribution and the step response
1、稳定性Stability 。如果闭环极点全部位于s左半平面,则系统一定是稳 定的,即稳定性只与闭环极点位置有关,而与闭环零点位置无关。
1 1 1 d d 1 d 1 K t'
1 K t' 1 d2 ' Kt Kt'
K K 两个分离点对应的开环增益分别为 d1 d2
j 1
当 0 K K d , K K d 时系统单位 阶跃响应为单调; 当 K d K K d 时,系统单位阶跃响应为振荡衰 减。
北京航空航天大学 二阶系统: Second-order system
2 2 闭环特征方程为 s 2n s n 0
北航自控原理复习材料
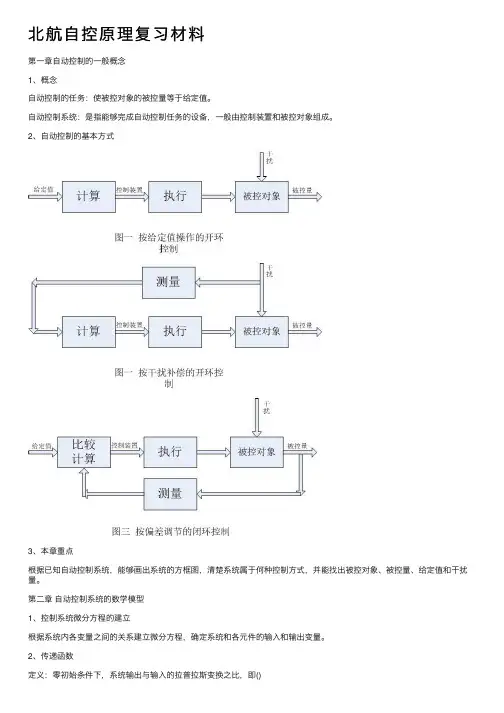
北航⾃控原理复习材料第⼀章⾃动控制的⼀般概念1、概念⾃动控制的任务:使被控对象的被控量等于给定值。
⾃动控制系统:是指能够完成⾃动控制任务的设备,⼀般由控制装置和被控对象组成。
2、⾃动控制的基本⽅式3、本章重点根据已知⾃动控制系统,能够画出系统的⽅框图,清楚系统属于何种控制⽅式,并能找出被控对象、被控量、给定值和⼲扰量。
第⼆章⾃动控制系统的数学模型1、控制系统微分⽅程的建⽴根据系统内各变量之间的关系建⽴微分⽅程,确定系统和各元件的输⼊和输出变量。
2、传递函数定义:零初始条件下,系统输出与输⼊的拉普拉斯变换之⽐,即()C s G s R s =,传递函数完全由系统的参数、结构决定,与外界输⼊⽆关。
3、典型环节的传递函数(1)、⽐例环节,()G s K =。
(2)、积分环节,1()G s s=。
(3)、微分环节,()G s s =。
(4)、惯性环节,1()1G s Ts =+。
(5)、⼀阶微分环节,()1G s s τ=+。
(6)、⼆阶振荡环节,221()2n n G s s s ζωω=++。
(7)、⼆阶微分环节,22()2n n G s s s ζωω=++。
(8)、延时环节,()sG s e τ-=。
其中,前⾯七种典型环节的传递函数经常使⽤,⼤家要记住。
4、动态结构图(1)、动态结构图⼀般由四种基本单元组成:信号线,⽅框,引出点,综合点。
(2)、动态结构图的⼏种常⽤等效变换5、梅森公式梅森公式⼀般形式为1()nk kk P G s =?=式中,()G s ——待求传递函数; ?——特征式,且1iijij kL L L L L L ?=-+-∑∑∑…;k P ——第k 条前向通道的总传递函数;k ?——特征式中,将与第k 条前向通道接触的回路所在项出去后的余下部分,称为余⼦式; iL ∑——各回路的“回路传递函数”之和;i jL L∑——两两不接触的回路的“回路传递函数”乘积之和;ijk L LL ∑——三三不接触的回路的“回路传递函数”乘积之和。
自动控制原理_详解
df y |x0 x k x ,简记为 y=kx。 可得 dx 若非线性函数由两个自变量,如z=f(x,y),则在 平衡点处可展成(忽略高次项)
f f z |( x0 , y0 ) x |( x0 , y0 ) y xv y
经过上述线性化后,就把非线性关系变成了线性 关系,从而使问题大大简化。但对于如图(d)所示为 强非线性,只能采用第七章的非线性理论来分析。对于 线性系统,可采用叠加原理来分析系统。
返回子目录
6.掌握由系统微分方程组建立动态结构图的方 法。 7.掌握用动态结构图等效变换求传递函数和用 梅森公式求传递函数的方法。 8.掌握系统的开环传递函数、闭环传递函数, 对参考输入和对干扰的系统闭环传递函数及误 差传递函数的概念。
北京航空航天大学
分析和设计任何一个控制系统,首要任务是 建立系统的数学模型。 系统的数学模型是描述系统输入、输出变量 以及内部各变量之间关系的数学表达式。 建立数学模型的方法分为解析法和实验法
北京航空航天大学
解析法:依据系统及元件各变量之间所遵 循的物理、化学定律列写出变量间的数学表 达式,并实验验证。
实验法:对系统或元件输入一定形式的信 号(阶跃信号、单位脉冲信号、正弦信号 等),根据系统或元件的输出响应,经过数 据处理而辨识出系统的数学模型。
北京航空航天大学
总结: 解析方法适用于简单、典型、常 见的系统,而实验方法适用于复杂、非常 见的系统。实际上常常是把这两种方法结 合起来建立数学模型更为有效。
下面根据不同的信号源来分析自动控制的几种基本控制方式
• 开环控制 – 按给定值操纵的开环控制 – 按干扰补偿的开环控制 • 按偏差调节的闭环控制 • 复合控制
一、按给定值操纵的开环控制
北航专业课参考书
参考书:(2013)
1.《动力学》(第2版)1-7 谢传锋主编,高等教育出版社
2.《机械原理》,郭卫东,科学出版社,2010
3.《机械原理教学辅导与习题解答》,郭卫东,科学出版社,2010
4.《机械设计》王之栎、马纲、陈心颐主编,北京航空航天大学出版社
5. 《机械设计基础》(下册)第25-34章,吴瑞祥等主编,北京航空航天大学出版社
6. 《自动控制原理》1-6章胡寿松主编,科学出版社
或《自动控制原理》1-6章孙虎章主编,中央广播电视大学出版社
参考书:(2012)
971 机械工程专业综合
1、«动力学»高等教育出版社谢传锋
2、«机械原理»科学出版社2010年出版郭卫东
《机械原理教学辅导与习题解答》科学出版社2010年出版郭卫东
3、«机械设计基础下册»(25-34章)北京航空航天大学出版社吴瑞祥等
4、«自动控制原理»第四版1-6章科学出版社出版胡寿松
(或«自动控制原理»1-6章)(中央广播电视大学出版社出版)(孙虎章)。
北京航空航天大学2008年硕士研究生入学考试自动控制原理真题
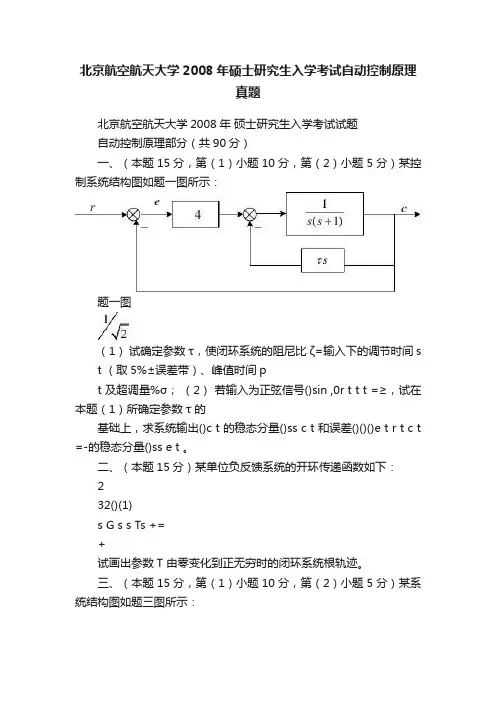
北京航空航天大学2008年硕士研究生入学考试自动控制原理真题北京航空航天大学2008年硕士研究生入学考试试题自动控制原理部分(共90分)一、(本题15分,第(1)小题10分,第(2)小题5分)某控制系统结构图如题一图所示:题一图(1)试确定参数τ,使闭环系统的阻尼比ζ=输入下的调节时间s t (取5%±误差带)、峰值时间pt 及超调量%σ;(2)若输入为正弦信号()sin ,0r t t t =≥,试在本题(1)所确定参数τ的基础上,求系统输出()c t 的稳态分量()ss c t 和误差()()()e t r t c t =-的稳态分量()ss e t 。
二、(本题15分)某单位负反馈系统的开环传递函数如下:232()(1)s G s s Ts +=+试画出参数T 由零变化到正无穷时的闭环系统根轨迹。
三、(本题15分,第(1)小题10分,第(2)小题5分)某系统结构图如题三图所示:题三图其中,10()(1)G s s s =+,1()0.081cs Gs s τ+=+,0τ>(1)确定参数τ,使开环渐近幅频特性曲线的截止频率为5rad /s ;(2)根据本题(1)所确定的τ值计算系统的相稳定裕度γ。
四、(本题15分)某非线性系统如题四图所示:题四图其中,1M =、1h =。
若取c 、c 为相坐标,试画出满足初始条件(0)2c =-、(0)0c= 的相轨迹。
要求确定相轨迹与开关线的前两个交点,并根据相轨迹分析系统运动是收敛还是发散。
五、(本题15分,每小题5分)某系统动态方程如下:110001010110xx u ??=+,[]10y x=(1)判断系统的可控性和可观测性;(2)若系统不可控。
试进行可控性分解;(3)求该系统由输入u 到输出y 的传递函数,并求()()u t t δ=时的单位脉冲响应()y t 。
六、(本题15分,每小题5分)某被控对象的动态方程如下:10121xx u =+,[]01y x=(1)设计状态反馈向量k ,使得经状态反馈u kx r =+后,闭环系统极点在1j -±处,这里r 为参考输入;(2)对该被控对象构造一极点为5-、5-的状态观测器;(3)若采用控制?u kxr =+,其中k 为本题(1)求出的反馈向量、?x 为本题(2)所设计的观测器状态,求由被控对象、状态观测器、反馈?u kxr =+构成的闭环系统的传递函数。
北航机电控制工程基础(自动控制原理)第五章2-典型环节频率特性

北京航空航天大学
二、积分环节 Integral links 1、伯德图
机电控制工程基础
K G (s) s
Fundamentals of Mechatronic Control Engineering
K G ( j ) j
K A( )
K ( ) 0 arctan j 0 2
幅值
机电控制工程基础
袁松梅教授 Tel:82339630
下半个圆对应于正频率部分,而上 半个圆对应于负频率部分。
Email:yuansm@
北京航空航天大学
四、振荡环节Oscillation link 2、伯德图 讨论 0
机电控制工程基础
1 时的情况。当K=1时,频率特性为:
K Kn G( s ) 2 2 2 T s 2Ts 1 s 2 n s n 2
G( s) K , G( j ) K
相频特性: ( )
1、伯德图
幅频特性:A( ) K ;
0
;
L( ) / dB
20log K 20log K 20log K
K 1
对数幅频特性:
K 1 lg
0 K 1
( )
180
0 L( ) 20 lg K 0 0
1.0 -45 100 -89.4
1 1 当 0时, (0) 0;当 时, ( ) ;当 时, () 。 T T 4 2
当时间常数T 变化时,对数幅频特性和对数相频特性的形状都不变,仅仅是根据转折 频率1/T 的大小整条曲线向左或向右平移即可。而当增益改变时,相频特性不变,幅 频特性上下平移。
K P ( ) 1 T 2 2 KT Q ( ) 1 T 2 2 Q ( ) T P( )
北航自动化课程
北航自动化课程引言概述:北航自动化课程是北京航空航天大学自动化学院开设的一门重要课程,旨在培养学生对自动化技术的理论和应用的深入理解。
本文将从课程设置、教学方法、实践环节和学习成果四个方面,详细阐述北航自动化课程的内容。
一、课程设置1.1 课程目标:北航自动化课程的目标是使学生具备自动化系统的基本概念和原理,掌握自动化系统的建模与仿真技术,能够设计和实现自动化控制系统。
1.2 课程内容:课程内容包括自动控制原理、信号与系统、数字信号处理、控制系统设计等方面的知识。
学生将学习到控制理论的基本原理和方法,了解自动化系统的各个组成部分以及它们之间的相互关系。
1.3 课程安排:北航自动化课程通常分为理论课和实验课两个部分。
理论课主要讲授基本概念和原理,实验课则通过实际操作和仿真实验,让学生深入理解和应用所学知识。
二、教学方法2.1 理论授课:北航自动化课程采用讲授与讨论相结合的方式进行教学。
教师通过讲解理论知识,引导学生思考和讨论,培养学生的分析和解决问题的能力。
2.2 实验操作:实验课是北航自动化课程的重要组成部分,学生将通过实际操作掌握自动化系统的建模和仿真技术。
实验操作能够帮助学生巩固理论知识,培养实际操作能力。
2.3 项目实践:为了提高学生的综合能力和创新意识,北航自动化课程还设置了项目实践环节。
学生将通过团队合作,完成一个自动化系统的设计和实现,并撰写相关报告。
三、实践环节3.1 实验室实践:北航自动化学院拥有先进的实验室设备和实验平台,学生将在实验室中进行各种实验操作,如控制系统仿真实验、传感器与执行器实验等,以培养学生的实践能力。
3.2 实习实训:为了让学生更好地了解实际工程应用,北航自动化课程还设置了实习实训环节。
学生将到企业或科研机构进行实习,亲身参与自动化系统的设计、调试和维护工作。
3.3 项目实践:项目实践是北航自动化课程的亮点之一,学生将通过团队合作完成一个真实的自动化系统项目,从需求分析到系统设计再到实施和测试,全面提升学生的实践能力和团队协作能力。
北京航空航天大学《931自动控制原理综合》历年考研真题(含部分答案)专业课考试试题
2014年北京航空航天大学931自动控制原理 综合考研真题
2013年北京航空航天大学931自动控制原理 综合考研真题
2012年北京航空航天大学931自动控制原理 综合考研真题
2011年北京航空航天大学931自动控制原理 综合考研真题
2010年北京航空航天大学931自动控制原理 综合考研真题
目 录
2014年北京航空航天大学931自动控制原理综合考研真题 2013年北京航空航天大学931自动控制原理综合考研真题 2012年北京航空航天大学931自动控制原理综合考研真题 2011年北京航空航天大学931自动控制原理综合考研真题 2010年北京航空航天大学931自动控制原理综合考研真题 2009年北京航空航天大学931自动控制原理综合考研真题 2008年北京航空航天大学931自动控制原理综合考研真题 2007年北京航空航天大学431自动控制原理考研真题及详解 2006年北京航空航天大学431自动控制原理考研真题及部分详解 2005年北京航空航天大学431自动控制原理考研真题及详解 2004年北京航空航天大学431自动控制原理考研真题及详解 2003年北京航空航天大学431自动控制原理考研真题及详解 2002年北京航空航天大学431自动控制原理考研真题 2001年北京航空航天大学453自动控制原理考研真题及详解 2000年北京航空航天大学453自动控制原理考研真题
2001年北京航空航天大学453自动控制原理 考研真题及详解
2000年北京航空航天大学453自动控制原理 考研真题
2005年北京航空航天大学431自动控制原理 考研真题及详解
2004年北京航空航天大学431自动控制原理 考研真题及详解
2003年北京航空航天大学431自动控制原理 考研真题及详解
北京航空航天大学自动控制基础知识
第一章 绪 论§§11..11 引引言言18世纪前:漏壶、指南车、钟表控制 ● 第一篇自控论文“论调节器”,J.G.Maxwell,1868(第一次工业革命:调速器-蒸汽机-负荷系统) 1788,英,瓦特调速器 ,第一次工程应用−−−→−稳定1868,英,物,Maxwell ;1877,英,数,Routh 稳定判据;1895,德,数,Hurwith 稳定判据 →稳定、精度; 1892,俄,数,李雅普诺夫;● 古典控制理论1927,反馈概念,美,Bell Lab 的Black(电子管放大器的失真问题); 1925,英,电,亥维赛,£引入求电网络的传递函数; 1932,英,电,Nyquist ,频率响应法; 1945,Bode ;1948,英,电,根轨迹法;1945,战后出版禁令撤销,经典控制著作:45,维纳反馈→一切控制系统,48,《控制论》; 1951,齐普金,脉冲系统的分析设计;1952,美,哥伦比亚,拉加齐尼,采样系统的分析和设计;⎩⎨⎧ 48R.Evans,19. W : 19451932 Nyquist :根轨迹法第二次世界大战,通信年,,年,,频率响应法Bode 缺陷:(1)只能用试探法设计系统,非最佳(根据经验设计-分析系统-重新设计直至满意) (2)只适于线性定常,单变量系统 现代控制理论(50年代)⎪⎪⎩⎪⎪⎨⎧系统辨识理论最优控制理论滤波)最佳滤波理论(论线性系统的状态空间理Kalman 分支:自适应控制、非线性、时变系统、分布参数、大系统、随机控制、分散控制、智能控制、混沌控制,…… 用于工控时的缺陷:(1)工业对象难以得到准确的数学模型;(2)性能指标难以用明显的数字形式表示; (3)设计的控制器]往往过于复杂,甚至不可实现——70年代 Rosenbrock 单变量频域法→多变量频域法→传统法70年代末,鲁棒性,解决参数不确定性系统的设计问题。
北航自动化课程
北航自动化课程北航自动化课程是北京航空航天大学(以下简称北航)自动化学院开设的一门专业课程。
该课程旨在培养学生的自动化技术和应用能力,使他们能够在自动化领域中具备扎实的理论基础和实践操作能力。
一、课程概述北航自动化课程是一门综合性的课程,涵盖了自动控制原理、传感器与测量技术、信号与系统、数字信号处理、机器人学等多个方面的内容。
通过本课程的学习,学生将掌握自动化系统的基本原理、工作原理和设计方法,并能够应用所学知识解决实际问题。
二、课程目标1. 培养学生的自动化思维和工程实践能力,使其能够独立进行自动化系统的设计、调试和维护。
2. 使学生具备深入理解自动控制原理的能力,能够分析和解决自动化系统中的问题。
3. 培养学生的团队合作和沟通能力,使其能够与他人协作完成自动化项目。
三、课程内容1. 自动控制原理:介绍自动控制系统的基本概念、数学模型和控制方法,包括PID控制、状态空间方法等。
2. 传感器与测量技术:介绍各种传感器的原理和应用,以及测量技术的基本原理和方法。
3. 信号与系统:介绍信号的基本特性和处理方法,以及线性系统的数学模型和分析方法。
4. 数字信号处理:介绍数字信号的采样和量化、滤波和频谱分析等基本概念和方法。
5. 机器人学:介绍机器人的基本结构和工作原理,以及机器人的运动学和动力学分析方法。
四、教学方法1. 理论讲授:通过课堂教学,向学生介绍自动化课程的基本概念、原理和方法。
2. 实验操作:通过实验室实践,让学生亲自操作自动化设备,掌握自动化系统的调试和维护技术。
3. 项目实践:通过小组合作,让学生参与自动化项目的设计和实施,培养团队合作和问题解决能力。
五、评估方式1. 课堂作业:包括理论题和计算题,用于检验学生对课程内容的理解和运用能力。
2. 实验报告:学生需撰写实验报告,详细描述实验过程、结果和分析。
3. 项目实践成果:学生需提交项目实践的成果报告,包括项目设计、实施过程和成果展示。