ANSCO智能巡检机器人
ANSCO智能巡检机器人

ANSCO智能巡检机器人一、简介ANSCO智能巡检机器人是一种基于人工智能技术的设备,它能够自主考核、检测、监测、分析市政道路、隧道、桥梁、高速公路等重点区域的盲区,实现对设备的24小时全天候运行监测,辅助运维人员进行精准维护和管理,使运维工作更加智能化、高效化。
二、功能该机器人具有以下功能:1.视觉识别功能机器人配备有高清晰度摄像头,可以通过图像识别和机器学习算法对周围环境进行实时检测。
还可以通过三维激光雷达进行空间定位和测距。
2.智能监测功能机器人可以通过基于深度学习和神经网络的算法,对检测区域内的设备运行状态进行实时监测,并记录故障信息。
并且可以通过人工智能算法对设备进行分析,实现设备状态的趋势预测,进一步预防故障发生。
3.自主规划路径功能机器人可以通过深度学习和地图导航算法,自主规划巡检路径,并快速地完成巡检任务。
同时,当机器人在巡检过程中发现异常情况时,可以自主规划新的路径进行探索。
4.自主充电功能机器人具有自主充电功能,当电量不足时,机器人可以自动寻找充电装置,并完成自主充电。
三、技术特点1.装备全面机器人采用多种传感器装备,包括红外线、摄像头、激光雷达、超声波等,能够全方位实现对周围环境的监测。
2.智能决策机器人通过深度学习和人工智能算法,能够自主学习和决策,并选择最优路径完成巡检任务。
3.多语音广播机器人具有多语音广播功能,可以通过内置扬声器向周围人群广播公共服务信息。
4.高效省电机器人配备高效电源管理系统,可实现对电量状态的实时监测和精准管理,从而节省能量,并延长机器人的使用寿命。
四、应用场景ANSCO智能巡检机器人可以广泛应用于市政道路、隧道、桥梁、高速公路等重点区域的维护和巡检。
1.市政道路机器人可以对市政道路进行巡检,并实时监测道路情况,记录并上报异常情况。
2.隧道机器人可通过人工智能算法和摄像头对隧道情况进行实时监测,并及时报告异常情况,防止事故的发生。
3.桥梁机器人可以通过视觉识别功能巡检桥梁,并记录桥梁情况,实现及时维护以及防止意外事故。
轨道式巡检机器人
轨道式巡检机器人在当今科技飞速发展的时代,各种创新技术和智能设备不断涌现,为人们的生活和工作带来了极大的便利。
其中,轨道式巡检机器人作为一种新型的智能化设备,正逐渐在各个领域发挥着重要作用。
轨道式巡检机器人,顾名思义,是一种沿着预设轨道进行巡检工作的机器人。
它融合了机械、电子、控制、计算机、传感器等多种技术,能够实现对特定区域或设备的自动监测、数据采集和故障诊断等功能。
轨道式巡检机器人的应用场景非常广泛。
在工业领域,例如化工厂、发电厂、钢铁厂等,这些场所通常存在高温、高压、有毒有害等危险因素,人工巡检不仅劳动强度大,而且存在一定的安全风险。
轨道式巡检机器人可以在这些恶劣环境中稳定运行,对设备的运行状态、温度、压力、液位等参数进行实时监测,及时发现潜在的安全隐患和故障。
在电力行业,它能够对变电站内的电力设备进行巡检,包括变压器、开关柜、避雷器等,检测设备的外观是否存在异常、是否有放电现象等,保障电力系统的安全稳定运行。
在轨道交通领域,轨道式巡检机器人可以对轨道、隧道等设施进行巡检,检测轨道的平整度、扣件的紧固情况、隧道壁的渗漏水等问题,确保列车的运行安全。
轨道式巡检机器人通常由机械本体、驱动系统、控制系统、传感器系统和通信系统等部分组成。
机械本体是机器人的基础结构,包括机身、行走机构、机械臂等,它的设计需要考虑机器人的工作环境和任务需求,保证机器人具有足够的强度和稳定性。
驱动系统负责为机器人提供动力,使其能够沿着轨道运动,常见的驱动方式有电机驱动、液压驱动等。
控制系统是机器人的“大脑”,它接收传感器采集的数据,进行分析处理,并发出控制指令,指挥机器人完成各种动作和任务。
传感器系统则是机器人的“眼睛”和“耳朵”,通过安装各种类型的传感器,如视觉传感器、温度传感器、压力传感器、声音传感器等,实现对环境和设备的感知。
通信系统用于机器人与控制中心之间的数据传输,确保机器人能够实时将采集到的数据传输给控制中心,同时接收控制中心的指令。
智能轨道型电力巡检机器人系统设计方案

智能轨道型电力巡检机器人系统设计方案设计目标:1.实现智能巡检:机器人能够自主巡检轨道,检测电力设备的运行状态和故障。
2.实时数据采集:机器人能够实时采集电力设备的各项参数,并将数据上传至后台服务器。
3.预警和故障诊断:机器人能够根据采集的数据对设备状态进行分析,发现异常情况并给出预警或故障诊断。
4.远程操控和管理:用户能够通过手机或电脑端监控机器人的巡检情况,并进行远程操控和管理。
硬件设计:1.机器人底盘:采用轨道型底盘设计,通过轨道导向系统在轨道上行走。
2.传感器系统:装配多种传感器,包括温度传感器、湿度传感器、电流传感器等,用于采集电力设备的各项参数。
3.摄像头:配备高清摄像头,用于拍摄设备照片和视频,并进行图像识别。
4.通信模块:装配无线通信模块,通过4G、WiFi等无线网络与后台服务器进行数据传输和远程操控。
5.电源系统:采用可充电锂电池作为主要电源,实现长时间巡检。
软件设计:1.路径规划算法:根据巡检任务和轨道地形,设计路径规划算法,确保机器人能够按照预定路径进行巡检。
2.数据采集与分析:编写数据采集程序,实时读取传感器数据,并将数据上传至后台服务器。
在服务器端进行数据分析,利用机器学习算法对设备状态进行分析和判断。
3. 预警和故障诊断:根据设备状态分析结果,通过App和Web页面向用户发送预警信息,并给出故障诊断建议。
4. 远程操控:通过App和Web页面,用户能够实时监控机器人的巡检情况,并进行远程操控,如改变巡检路径、启停机器人等。
5.后台服务器:搭建后台服务器,存储和管理巡检数据,实现用户权限管理和设备管理等功能。
系统工作流程:1. 用户在App或Web页面下发巡检任务,并设置巡检路径和频率。
2.机器人根据巡检任务和路径规划算法,按照预定路径巡检电力设备。
3.机器人通过传感器采集电力设备的各项参数,并将数据上传至后台服务器。
4.后台服务器对采集的数据进行分析和处理,发现异常情况并给出预警或故障诊断建议。
变电站智能巡检机器人

变电站智能巡检机器人标准实用:变电站智能巡检机器人XXX,2015年12月目录一、概述1.1 变电巡检周期变电站是电力系统的重要组成部分,为保证其正常运行,需要进行定期巡检。
传统的人工巡检方式存在效率低、安全风险大等问题,因此需要引入智能巡检机器人。
1.2 变电站巡检内容变电站巡检内容包括设备状态、温度、湿度、绝缘电阻等多个方面。
机器人通过搭载多种传感器,可以快速、准确地获取这些数据。
1.3 人工巡检有效性分析与传统的人工巡检方式相比,智能巡检机器人具有更高的效率和更低的安全风险。
同时,机器人可以24小时不间断巡检,确保设备的安全稳定运行。
二、系统设计2.1 整体结构智能巡检机器人由底盘、机械臂、传感器、控制系统等多个部分组成。
底盘采用全地形车轮设计,可以适应各种复杂地形。
机械臂可以实现多种动作,可以对设备进行精细巡检。
传感器包括温度、湿度、绝缘电阻等多种类型,可以全面获取设备状态信息。
控制系统采用自主研发的智能控制算法,可以实现自主导航、智能巡检等多种功能。
2.2 机器人控制系统机器人控制系统采用嵌入式系统设计,可以实现对机器人的远程控制和数据传输。
同时,系统还具有自主导航、避障等智能功能,可以让机器人在巡检过程中更加高效、安全。
2.3 变电站检测系统变电站检测系统是一种用于监测变电站运行状态的设备。
它通过采集变电站的各种参数,如温度、湿度、电压等,来判断变电站是否正常运行。
该系统还可以检测变电站的故障,并及时报警,以便工作人员及时处理。
2.3 远程红外监测与诊断系统远程红外监测与诊断系统是一种用于监测变电站设备的红外成像设备。
它可以远程监测变电站设备的温度变化,并通过红外成像技术来诊断设备是否存在故障。
该系统可以及时发现设备故障,并提供预警信息,以便工作人员及时处理。
2.4 远程图像监测与诊断系统远程图像监测与诊断系统是一种用于监测变电站设备的图像监控设备。
它可以远程监测变电站设备的运行状态,并提供实时图像。
化工园区防爆智能巡检机器人产品介绍
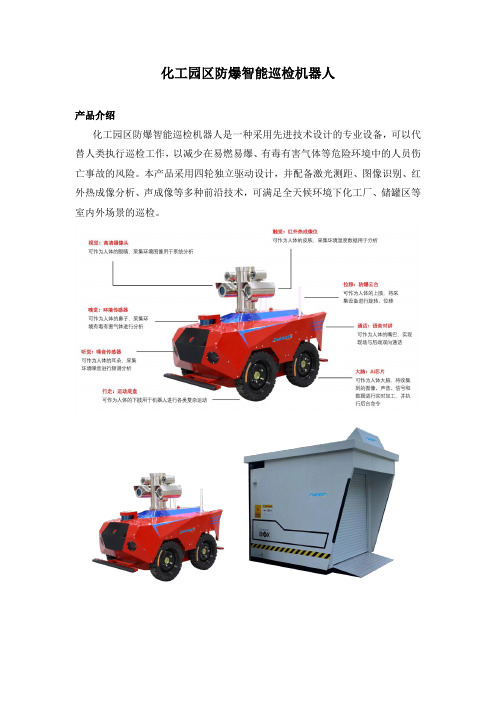
化工园区防爆智能巡检机器人产品介绍化工园区防爆智能巡检机器人是一种采用先进技术设计的专业设备,可以代替人类执行巡检工作,以减少在易燃易爆、有毒有害气体等危险环境中的人员伤亡事故的风险。
本产品采用四轮独立驱动设计,并配备激光测距、图像识别、红外热成像分析、声成像等多种前沿技术,可满足全天候环境下化工厂、储罐区等室内外场景的巡检。
技术参数功能特点巡检路线设定:支持自主巡检、自主建图、路径规划、自主避障、定位导航功能;表计数据读取:机器人的图像识别功能代替了人工手动抄表录入功能,通过图像建模识别技术和机器深度学习算法,机器人可以准确识别现场各种数字、指针仪表、阀门、液位计等设备状态,对设备的运行安全进行记录。
机器人进行一个仪表的识别时间平均为20秒,极大的提高现场记录的效率;智能充电:机器人完成一次巡检任务之后自动导航返回充电房进行充电。
双向语音对讲:机器人的双向对讲功能,利用摄像机、拾音器和扬声器设备,在现场可与集控室实现视频对讲,实现更加灵活的远程监控和应急指挥作战。
设备红外测温:机器人通过红外热成像技术检测设备一定时间段内温度梯度图的变化特征,通过红外光谱分析,实现设备温度判断。
这项功能也适用于当设备发生超温、剧烈升温及泄漏时,能够及时捕获设备温度变化区域和泄漏点的区域的温度异常,产生报警信息;安全行为检测:支持现场人员是否正确穿戴工作防护用品(安全帽、工作服),是否有抽烟、接打电话等违规行为检测,使机器人除具备巡检功能外,还可替代安全员进行安全巡视;跑冒滴漏检测:机器人通过AI视觉识别技术等检测手段,对工作设备进行跑冒滴漏检测。
系统搭载高精度云台+高清摄像机精准定位泄漏点,对焦拍照发送至系统平台;罐体液位检测:机器人通过红外热成像技术检测设备一定时间段内温度梯度图的变化特征,通过红外光谱分析,实现设备温度判断。
当设备发生超温、剧烈升温及泄漏时,能够及时捕获设备温度变化区域和泄漏点的区域的温度异常,产生报警信息。
变电站智能巡检机器人

变电站智能巡检机器人在当今科技飞速发展的时代,电力系统的稳定运行对于社会的正常运转至关重要。
为了确保变电站的安全可靠运行,一种新型的技术手段——变电站智能巡检机器人应运而生。
变电站是电力系统中进行电压变换、电能分配和控制的重要场所。
传统的变电站巡检工作通常由人工完成,巡检人员需要定期对设备进行检查、记录数据和分析状况。
然而,这种方式存在着一些明显的局限性。
人工巡检不仅劳动强度大,而且效率低下,难以做到对设备的实时监控。
此外,在一些恶劣的环境条件下,如高温、高寒、强电磁干扰等,人工巡检还存在一定的安全风险。
为了解决这些问题,变电站智能巡检机器人闪亮登场。
这种机器人通常配备了先进的传感器和检测设备,能够对变电站内的设备进行全方位、多角度的监测。
它们可以沿着预设的轨道或者自主规划的路径在变电站内移动,对设备的外观、温度、声音、局部放电等参数进行实时采集和分析。
从外观上看,变电站智能巡检机器人通常具有小巧灵活的身形,以便在狭窄的空间内自由穿梭。
其外壳采用了坚固耐用的材料,能够适应复杂的变电站环境。
机器人的“眼睛”一般是高清摄像头,可以清晰地拍摄设备的图像,不放过任何细微的缺陷。
而“耳朵”则可能是声音传感器,能够捕捉设备运行时发出的异常声音。
在功能方面,智能巡检机器人的表现更是出色。
它们可以通过红外测温技术,快速准确地检测设备的温度变化。
一旦发现温度异常升高,就能够及时发出警报,提醒工作人员进行处理,从而有效地避免设备因过热而发生故障。
同时,机器人还可以利用超声波技术检测设备的局部放电情况。
局部放电是电气设备绝缘性能下降的重要征兆,通过及时发现并处理局部放电问题,可以延长设备的使用寿命,提高电力系统的可靠性。
除了硬件设备,智能巡检机器人的软件系统也同样强大。
它们搭载了先进的数据分析和处理算法,能够对采集到的数据进行快速准确的分析。
通过与预设的标准数据进行对比,机器人可以判断设备是否处于正常运行状态。
如果发现异常,会立即将相关信息发送给监控中心,以便工作人员采取相应的措施。
2024年智能巡检机器人市场前景分析
2024年智能巡检机器人市场前景分析概述智能巡检机器人是一种结合了人工智能和机器人技术的现代化设备,主要用于工业、农业、交通等领域的巡检工作。
随着技术的不断进步和市场需求的增长,智能巡检机器人市场呈现出巨大的发展潜力。
市场需求分析工业领域随着工厂规模的扩大和自动化程度的提升,工业巡检的需求也越来越大。
传统的巡检方式存在人力成本高、效率低下等问题,而智能巡检机器人可以通过搭载传感器和摄像头等设备,自主完成巡检任务,大大提高了巡检的效率和准确性。
农业领域农业巡检是保障农作物生长和产量的重要环节。
智能巡检机器人可以通过摄像头和红外传感器等设备,帮助农民及时监测农作物的生长状况、病虫害情况等,并提供精确的数据分析,减少了农作物管理中的盲目性,提高了农业生产效益。
交通领域智能巡检机器人在交通领域有着广泛的应用前景。
例如,在桥梁巡检中,机器人可以代替人工进行巡视,通过搭载高清摄像头和红外热成像设备,快速检测桥梁的结构安全和温度异常情况。
这样不仅减少了人力资源的浪费,还提高了桥梁巡检的效率和准确性。
市场竞争分析目前,智能巡检机器人市场存在着一些竞争厂商。
主要的竞争因素包括产品功能、技术水平、售后服务等。
产品功能智能巡检机器人的功能越丰富,越能满足不同行业的需求,具有更大的市场竞争力。
例如,一些优秀的智能巡检机器人不仅可以进行自主巡检,还能与其他设备进行数据交互和联动控制,实现更高效的工作模式。
技术水平智能巡检机器人的技术水平直接决定了其可靠性和稳定性。
顶尖厂商在机器人感知、决策和控制等方面投入了大量的研发资源,使其产品具备更先进的技术优势,从而在市场上脱颖而出。
售后服务对于用户而言,良好的售后服务是选择智能巡检机器人的重要考虑因素之一。
厂商能够提供专业的技术支持、及时的维修保养以及远程监控等服务,将赢得用户的信任和回购。
市场发展趋势技术创新随着人工智能和机器人技术的不断发展,智能巡检机器人将会越来越智能化和智能化。
安防巡检机器人
安防巡检机器人在当今社会,科技的飞速发展给各个领域带来了前所未有的变革,安防领域也不例外。
安防巡检机器人作为新兴的技术产物,正逐渐成为保障我们生活和工作环境安全的重要力量。
安防巡检机器人是什么呢?简单来说,它是一种能够自主移动、具备多种感知能力,并能够执行巡逻、监测、预警等任务的智能化设备。
想象一下,一个小巧灵活的机器人,配备着高清摄像头、传感器、智能分析系统等先进设备,在各种场所中穿梭,时刻保持警惕,为我们的安全保驾护航。
安防巡检机器人的出现,首先解决了人力巡检存在的一些局限性。
传统的人工巡检,不仅效率低下,而且容易受到人为因素的影响,比如疲劳、注意力不集中等。
而安防巡检机器人可以不知疲倦地工作,24 小时不间断地进行巡逻和监测。
无论是在白天还是夜晚,无论是炎热的夏天还是寒冷的冬天,它都能坚守岗位,确保安防工作的连续性和稳定性。
再者,安防巡检机器人具有更强大的感知能力。
它搭载的高清摄像头可以清晰地拍摄到周围的环境,不放过任何一个细节。
同时,各种传感器能够感知温度、湿度、烟雾、声音等多种信息,及时发现异常情况。
而且,通过智能分析系统,机器人能够对收集到的数据进行快速处理和判断,迅速识别出潜在的安全威胁,比如火灾隐患、非法入侵等,并及时发出警报。
在实际应用中,安防巡检机器人的优势更是得到了充分的体现。
在一些大型工厂、仓库中,机器人可以沿着设定的路线进行巡逻,检查设备的运行状况、货物的存放情况等。
在机场、车站等公共场所,它可以协助工作人员维持秩序,监测人流密度,预防突发事件的发生。
在一些危险的化工园区、电力设施等区域,机器人能够替代人类进入危险环境进行巡检,保障工作人员的生命安全。
此外,安防巡检机器人还可以与其他安防系统进行联动。
比如,当它发现异常情况时,可以立即通知监控中心,并与门禁系统、消防系统等协同工作,迅速采取相应的措施。
这种联动机制大大提高了安防工作的效率和响应速度,使得安全防范更加严密和有效。
巡检机器人在各个行业的应用场景
巡检机器人在各个行业的应用场景
巡检机器人在各个行业的应用场景包括:
1. 制造业:巡检机器人可以在制造车间内巡视和检查生产线的设备和机械,定期检测设备的运
行状态和性能,帮助企业提高生产效率和产品质量。
2. 建筑业:巡检机器人可以在建筑工地上巡视和检查建筑结构、安全设施和管路系统等,及时
发现和解决可能存在的问题,确保工地的安全和建筑质量。
3. 物流业:巡检机器人可以在物流仓库内巡视和检查货物存储和运输设备,及时发现货物丢失、损坏或设备故障等问题,提高物流运作的效率和准确性。
4. 能源行业:巡检机器人可以在电力、石油和天然气等能源领域内巡视和检查设备、管道和设施,帮助检测并预防潜在的泄漏、故障和安全问题。
5. 铁路和交通运输业:巡检机器人可以在铁路轨道上和交通运输枢纽内巡视和检查信号灯、轨
道和设施,及时发现和解决可能存在的故障和安全隐患,确保交通运输的安全和畅通。
6. 医疗卫生行业:巡检机器人可以在医院内巡视和检查诊疗设备、药品和卫生环境等,提供实
时监测和报告,帮助医疗机构管理和维护设备,提高医疗服务质量。
7. 农业:巡检机器人可以在农田里巡视和检查农作物生长状况、土壤湿度和施肥情况等,通过
图像识别和传感器数据收集,帮助农民调整种植管理策略,提高农产品的产量和品质。
8. 公共安全:巡检机器人可以在安保巡逻和监控领域中使用,巡视和检查公共场所的安全设施、监控摄像头和感应器等,发现可疑行为和火灾风险,并及时报警或采取措施维护公共安全。
配电室轨道式智能巡检机器人系统方案 (2)
配电室轨道式智能巡检机器人系统方案配电室轨道式智能巡检机器人系统方案主要包括以下几个方面的内容:1. 巡检机器人设计:设计一个轨道式巡检机器人,可以在配电室内自动行走,并检测配电室内的设备状态。
巡检机器人应具备自主导航、定位和避障能力,以确保安全。
同时,机器人应搭载各种传感器,如温度传感器、湿度传感器、电流传感器等,能够实时监测设备的运行状态。
机器人还应该具备数据记录、分析和报警功能,能够及时发现设备故障和异常情况。
2. 轨道系统设计:设计一个适用于配电室的轨道系统,通过轨道系统将巡检机器人引导到需要巡检的设备旁边。
轨道系统应具备稳定性和耐用性,并与机器人的导航系统相匹配,确保机器人能够准确到达指定位置。
3. 控制与通信系统:设计一个控制系统,能够远程控制巡检机器人的运动,同时,建立一个与机器人通信的网络系统,将机器人采集到的数据传输到远程监控中心。
控制系统和通信系统应具备稳定性和实时性,以确保对配电室的监控和管理。
4. 数据处理与分析:开发一个数据处理与分析系统,对机器人采集到的数据进行处理和分析,识别设备状态和异常情况。
该系统还应具备预测性分析和故障预警功能,能够提前发现设备故障的可能性,并提出相应的解决方案。
5. 用户界面:开发一个用户界面,用于展示机器人巡检的结果和设备状态。
用户界面应具备友好的操作界面和直观的数据展示,方便用户查看设备状态和故障信息。
总结:配电室轨道式智能巡检机器人系统方案主要包括巡检机器人设计、轨道系统设计、控制与通信系统、数据处理与分析和用户界面等几个方面的内容。
通过设计一个完整的系统,可以实现配电室的自动化巡检和设备状态监测,提高配电室的安全性和运行效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
52 48 53 47
43
B相
70 74
67
64
62
B相
44
77
75
A相
44
66
65
61
A相
66
22
76
噪声源
191 198
88 199
54
46
45
110 206
175
182
183
190
充电试验区1
充电试验区2
6m
充电试验区3
充电试验区4
巡检线路1:标签点50个,巡检点191个。
4m
二、智能巡检机器人技术亮点
通过全景拼接技术对各个采集方位的热图像进行全景空间的匹配对准,合成一幅
宽视角场景的、完整的、高清晰的红外全景图像
由150张左右红外图合成的变电站全景红外图
拼接前各采集方位的热图像
拼接后的全景热图像
二、智能巡检机器人技术亮点
仪表可视化监测
通过全景拼接技术对各个采集方位的热图像进行全景空间的匹配对准,合成一幅
可大大减少长期人工的投入。实现
02
01 03
3
了全天不间断的巡检任务。
社会效益:替代人的日常巡检工 作,在一些特殊环境下(如雷雨
天等)都可很好的进行巡检工作,
降低了由人巡检时的安全风险等。
四、智能巡检机器人投资效益
智能巡检机器人应用案例
绍兴电力局 瑞安110千伏北门 变电站
渔峡开关站
谢谢!
实时采集热图像及高清图像并存储到后台存储服务器
系统后台对采集的数据与历史数据对比自动生成分析报表可打印 通过后台系统设定每天定时巡检、临时巡检自主完成任务,也可人 工遥控巡检 工作电量过低、图像采集回传失败等异常出现时主动发出信号告知 后台
一、智能巡检机器人设计概念
智能巡检机器人的结构组成
智能巡检机器人主要组成部分:四驱动底盘、激光传感器、智能云台、可见光摄像机、 红外热像仪以及其他部件。
室内路面
室外路面
防滑、防结冰
三、智能巡检机器人应用环境
可扩展性强
由于环境变化、以及应用的需求提升,设备的后续扩展性有以下几点:
仪器实时控制的增强
1
6
各种硬件的升级,针对 性更高需求的研发如: 子母可分离式巡检机器 人等
图像处理技术的升级
2
5
客户端WEB 软件的升级
红外图像智能识别 技术的提升
3
4
系统平台软件的升级
19
39
18
11
33 143 150
72
55 151 158 56
69 63
77 159 166
13 5
38
99
50m
167 78
174
50 42 49
12
区域八
C相
15 6 78 73
34
区域七
68
区域六
13 6 13 7 13 8
区域五
51
刀 闸 一 组
C相
13 4
71
CTHale Waihona Puke 一 组13 3100
一
智能巡检机器人设计概念
二
智能巡检机器人技术亮点
三
四
智能巡检机器人应用环境
智能巡检机器人投资效益
四、智能巡检机器人投资效益
1
经济效益:使用智能巡检机器人,
2
工作效益:智能巡检机器人使用 简单方便、易操作,比人员的巡 检数据更全面,更精准。为电网 安全乃至社会用电的稳定提供了 强有力的技术保障。
一
智能巡检机器人设计概念
二
智能巡检机器人技术亮点
三
智能巡检机器人应用环境
四
智能巡检机器人投资效益
二、智能巡检机器人技术亮点
激光制导,无轨行走
使用激光定位技术 不需要任何轨道 使用原有路面就可以进行全站 巡检工作
定位精度高达5毫米
二、智能巡检机器人技术亮点
多点自主巡航
巡检机器人的智能扫描形成系统场地地图,在系统中根据地图实现任务规划功能,
全自主行走
自主充电 可见光图像智能判别 红外测温与故障报警
地图索引,激光制导实现自主行走能力
巡检任务完成自行驶入充电房进行充电,或电量低自身告警发出充 电命令指令 采用高清摄像机采集,后台智能分析判别技术 采用红外热成像仪自识别高温报警技术
视频采集与存储
巡检报表分析与历史数据分析 定时巡检、临时巡检、遥控巡检 自身状态监测
可视化温度识别技术
根据红外热成像原理,机器人可实现非接触式的温度测量,并图像化显示。
下图为双视场拍摄:
双视场可视化观测
二、智能巡检机器人技术亮点
气体可视化泄漏检查
通过机器人上的气体检测仪,可轻易的对SF6及其他肉眼不无法识别的气体泄漏进
行可视化图像观测。
气体泄漏观测
二、智能巡检机器人技术亮点
智能识别全景拼接
智能巡检机器人
介绍
一
智能巡检机器人设计概念
二
智能巡检机器人技术亮点
三
智能巡检机器人应用环境
四
智能巡检机器人投资效益
一、智能巡检机器人设计概念
智能巡检机器人的设计背景 智能、安全、高效
设计智能巡检机器人是为了解决特种环境下的人工检查设备,存在的安全风险和提
高工作的效率及精确性、实时性等问题。
设计目标 实现方式
一、智能巡检机器人设计概念
采用视觉识别技术,自主完成巡检任务 采用视觉识别技术,自主完成巡检任务
智能巡检机器人用于替代人工完成变电站巡检中遇到的急、难、险、重和重复 性工作。可以加载红外热成像仪、气体检测仪、高清摄像机等有关的电站设备检测装 置,以自主和遥控的方式,代替人对室外高压设备进行巡测,以便及时发现电力设备 的内部热缺陷、外部机械或电气问题如异物、损伤、发热、漏油等等,给运行人员提 供诊断电力设备运行中的事故隐患和故障先兆的有关数据。智能巡检机器人的推广应 用将进一步提高电力生产运行的自动化水平,为电力安全生产提供更多保障。
一、智能巡检机器人设计概念
各组成结构的简要说明 测温热成像仪、气体检测仪、军用级四驱底盘、智能云台等 最先进的测温热像仪非接触式自识别测温技术
最新气体检测仪,自动判断SF6气体泄漏点技 术,最小检漏量达到0.001毫升/秒 军用级别四驱动底盘,激光制导自主巡航技术
高精度智能型云台,水平360°、垂直180°; 预置精度+/- 0.03°。
宽视角场景的、完整的、高清晰的红外全景图像
仪表的巡检
二、智能巡检机器人技术亮点
实时数据分析
实时数据回传分析,数传误码率≤10-6,时延≤20ms。图传时延≤300ms。
二、智能巡检机器人技术亮点
报表的生成
系统自动生成设备缺陷报表、巡检任务报表等功能,并提供温度历史曲线展示功能,
所有报表具有查询、打印等功能。
可编辑巡检点不少于2000个
70m
111 1 118
7 1 6
119 23
126 45
21 15
127
134 67
27 28
135
142
41 35
区域一
区域二
14
区域三
22
区域四
34
89
8 2 5
13 16
20 23 26 29
33 36 32 24 25 30 31 37
40
9 3 4 10
12 17 11
二、智能巡检机器人技术亮点
自主执行任务、自主充电、巡航时间长
无需人员操控,按时间表自主执行任务并自主进行充电 充满一次电最大续航时间5小时
巡检机器充电中
激光制导自主充电
一
智能巡检机器人设计概念
二 三
智能巡检机器人技术亮点
智能巡检机器人应用环境
四
智能巡检机器人投资效益
三、智能巡检机器人应用环境
智能巡检机器人在电力行业的应用
可实现在无人值守的变电站以及其他无人值守的电力环境下的室内、室外的
巡检工作
室外巡检
室内巡检
三、智能巡检机器人应用环境
各种环境中都可稳定、可靠运行
1、军用四驱动底盘能够最高运行速度可达3米/秒
2、可抵抗最大风速:20m/s(注:8级大风 17.2~20.7m/s )最大涉水深度100mm
3、爬坡能力应不小于15度,越障能力,最大越障高度为5cm 4、充电一次可续航工作5小时 5、四驱底盘具备自动加热系统适应低温下工作,可选滚带式底盘应对结冰路面等情况
6、云台具备自动加热系统,同时云台内部采用低温润滑油防结冰
7、外壳表面有保护涂层或防腐设计,符合《IPC J-STD-033B.1-2007》标准 8、机器人的最大工作温度为+50℃,内置自动调温技术最低能在-45℃下工作 9、全体设计防护等级IP66,部分可达IP67