台达交流伺服ASDA-MS 系列
台达PLC控制伺服ASDA说明
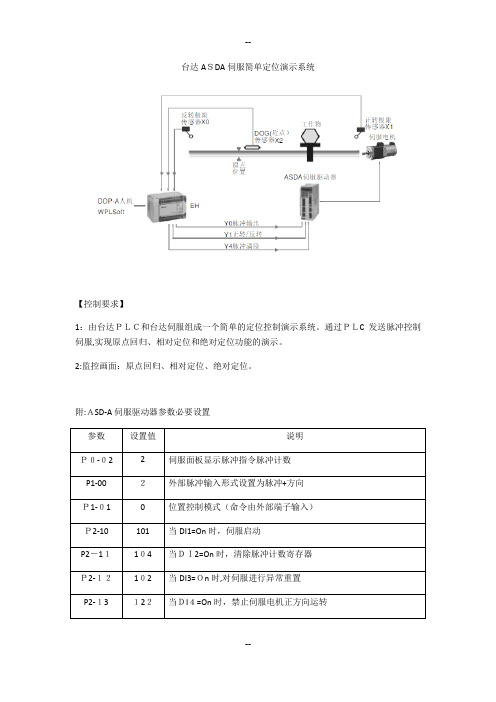
台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
2:监控画面:原点回归、相对定位、绝对定位。
附:ASD-A伺服驱动器参数必要设置注意:当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
附:PLC元件说明附:PLC与伺服驱动器硬件接线图控制程序:程序说明:1:当伺服上电之后,如无警报信号,X3=On,此时,按下伺服启动开关,M10=On,伺服启动。
2:按下原点回归开关时,M0=On,伺服执行原点回归动作,当DOG信号X2由Off→On变化时,伺服以5KHZ的寸动速度回归原点,当DOG信号由On→Off变化时,伺服电机立即停止运转,回归原点完成。
3:按下正转10圈开关,M1=On,伺服电机执行相对定位动作,伺服电机正方向旋转10圈后停止运转。
4:按下正转10圈开关,M2=On,伺服电机执行相对定位动作,伺服电机反方向旋转10圈后停止运转。
5:按下坐标400000开关,M3=On,伺服电机执行绝对定位动作,到达绝对目标位置400,000处后停止。
6:按下坐标-50000开关,M4=On,伺服电机执行绝对定位动作,到达绝对目标位置-50,000处后停止。
7:若工作物碰触到正向极限传感器时,X0=On,Y10=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
8:若工作物碰触到反向极限传感器时,X1=On,Y11=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
9:当出现伺服异常报警后,按下伺服异常复位开关,M11=On,伺服异常报警信息解除,警报解除之后,伺服才能继续执行原点回归和定位的动作。
10:按下PLC脉冲暂停输出开关,M12=On,PLC暂停输出脉冲,脉冲输出个数会保持在寄存器内,当M12=Off时,会在原来输出个数基础上,继续输出未完成的脉冲。
台达PLC控制伺服ASDA说明

台达PLC控制伺服ASDA说明1. 引言伺服ASDA是台达电子公司的一种控制器,它可以用于控制伺服马达的运动。
PLC(可编程逻辑控制器)是一种用于控制机器的电子设备,它可以与伺服ASDA 配合使用,以控制机器的运动和操作。
本文将介绍如何通过PLC控制伺服ASDA,以及如何进行PLC代码的编写和调试。
2. ASDA伺服ASDA是一种用于控制伺服马达的控制器。
它可以实现精确的运动控制,具有高速、高精度、高可靠性等特点。
ASDA包括伺服驱动器和伺服电机,通过与PLC配合使用,可以实现对机器的高精度控制。
3. PLC控制伺服ASDA的方法PLC与伺服ASDA配合使用时,需要按照以下步骤进行:3.1 首先,准备PLC和伺服ASDA设备需要准备一台PLC控制器和一台伺服ASDA控制器,以及相应的控制线缆等设备。
3.2 然后,连接PLC和伺服ASDA设备将PLC和伺服ASDA控制器连接起来,以便它们之间可以进行通信。
通常可以使用RS232、RS485等通信协议来进行通信。
3.3 接下来,编写PLC程序根据具体的控制需求,编写PLC程序。
一般来说,PLC程序的编写分为三个部分:输入部分、处理部分和输出部分。
在输入部分,需要将输入的数据进行采样和处理,以便传递给PLC程序;在处理部分,需要对输入数据进行处理并计算,以便得出控制伺服ASDA所需的驱动信号;在输出部分,需要将计算得出的控制信号传递给ASDA控制器,以便实现对伺服电机的控制。
3.4 最后,调试PLC程序在编写完PLC程序后,需要进行调试。
这是因为,PLC程序通常是由多个模块组成,而这些模块之间可能存在相互影响的情况。
因此,在调试PLC程序时需要对程序进行逐步调试和测试。
4. PLC代码的编写示例下面给出一个PLC代码编写的示例,以控制伺服ASDA为例。
假设我们需要控制一个电机,让它进行前后运动。
PLC控制器需要采集传感器信号,计算运动控制信号,并将它们传递给ASDA控制器。
ASDA交流伺服驱动系统系列

ASDA交流伺服驱动系统系列交流伺服驱动器随着微处理器技术的日新月异,大功率、高性能半导体功率器和伺服电机所需永磁材料制造工艺的发展及其性价比不断提高,交流伺服电机和交流伺服控制系统已经成为当前工业领域中,实现自动化的基础技术。
台达ASDA交流伺服驱动器以掌握核心的电子技术为基础,针对不同产业机械的客户需求进行研发;提供全方位的伺服系统产品。
全系列产品的控制回路均采用高速数字信号处理器(DSP),配合增益自动调整、指令平滑功能的设计以及软件分析与监控,可达到高速位移、精准定位等运动控制需求。
ASDA-A+系列(new)本系列是台达进阶泛用型的交流伺服驱动系统。
规格上,编码器的分辨率提升到20bit(1280000p/rev);对于需要高精度加工的工具机产业,能够提供更精准的控制。
对于需要高扭力输出的应用设备,ASDA-A+提供了3.0kW到7.5kW的高扭力选择(19.1N.M~47.74N.M)。
规格特性:1.ASDA-A+伺服驱动器包含4.5kW,5.5kW,7.5kW2.全系列机种均为交流三相220V电压输入3.编码器分辨率为20bit(1280000p/rev)4.ECMA伺服电机包含3kW,4.5kW,5.5kW,7.5kW5.电机惯量型式皆为中高惯量(54.95E-4kg.m2~142.7E-4kg.m2)6.内置简易运动模式;支持原点复归、分度功能、自动循环定位等模式7.高速脉冲输入功能,可搭配台达PLC产品–DVP20PM达到两轴同动,圆弧插补等精密控制8.支持MODBUS通讯控制(RS-485RS-422RS-232),ASCIIRTU通讯协议9.ASDA-A+驱动器内设电机匹配选择功能最佳应用:弹簧机械、弯管机械、折床机械、NC送料机械、全电射出机、龙门综合加工机械ASDA-B系列本系列是台达标准功能型的交流伺服驱动系统。
除了提供容易操控的手持式面板,并搭配友善的软件操作界面,能快速进行伺服驱动增益调试及状态监控,并提供多样化的电机容量选择。
ASDA-Soft 软体辅助说明

功能表
可用通道数 3CH
2CH
2CH 2CH
file://C:\Documents and Settings\Administrator\Local Settings\Temp\~hh1BA1.htm 2014-10-28
ASDA
连续型示波器
ASAD-A2 示波器
l提供FFT功能。
l适用于ASDA-A2机种,提供三种速率 1. 高速监视8k:提供0.125ms高解 析度的示波器。 2. 高速监视16k:提供0.0625mk:提供1ms解析度的 示波器。 若取消勾选择表示低速监视
ASDA
Page 2 of 65
改变显示语言:
回到目录
功能概述
本软体目前提供三种语言选择(英文/简体中文/繁体中文)可供使用者操作使用。
强烈建议使用者:在一开始执行本软体时,就选定语言,不要操作中途变更语言设定,以免因变更语言而会重新载入,而会刷新使用者 的输入值。
适用机种
A Series、 B Series、A2 Series、B2 Series
5. 开启/储存参数档资料: 当使用者抓取完资料后,可将所抓取的资料储存起来以便日后查看。 开启示波器资料:目前只能开启*.scp的示波器资料档,其他格式档案则无法储存。 储存示波器资料:软提供多种储存档案格式,如下: *.scp:示波器档,此档案格式可再日后由本软体开启,使用者如要日后再开启查看,强烈建议必须存成此档案格式,否则其他格式 无法由本软体开启。 *.xls:为 EXCEL 档案格式,方便使用者他用。 *.txt:为文字档格式,方便使用者他用。 *.bmp:为一般的图档,方便使用者运用。
1. 按下On-Line。 2. 从下拉式选单中,选择所要连接的机种。
台达PLC控制伺服说明

14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
Del ASDA A M SC 操作手册 配线
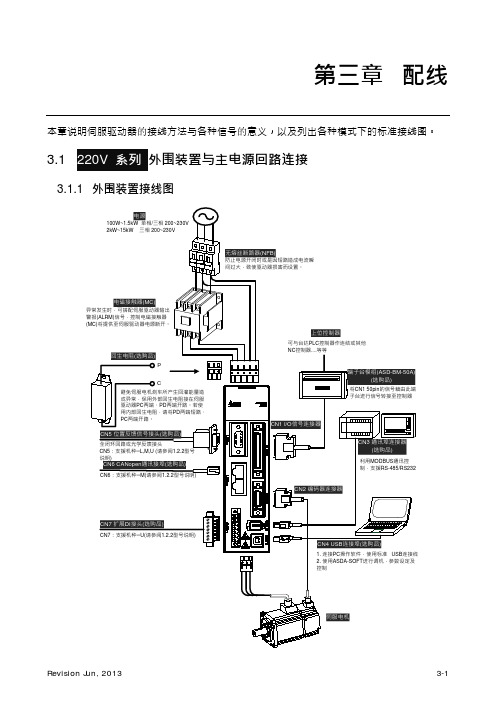
2) R、S、T 及 U、V、W 这六条大电力线不要与其他信号线靠近,尽可能间隔 30 公分(11.8 英寸)以上。
3) 如果编码器 CN2 或是位置反馈信号接头 CN5 联机需要加长时,请使用双绞并附屏蔽接 地的信号线。请不要超过 20 公尺(65.62 英尺),如果要超 过20 公尺,请使用线径大 一倍的信号线,以确保信号不会衰减太多。关于 20 公尺线长的编码器配线规格,请使 用芯线尺寸 AWG26,并符合 UL 2464 规范的金属编织双绞屏蔽线(Metal braided shield twisted-pair cable)。
电磁接触器(MC) 异常发生时,可搭配伺服驱动器输出 警报(ALRM)信号,控制电磁接触器 (MC)将提供至伺服驱动器电源断开。
回生电阻(选购品) P
C 避免伺服电机刹车所产生回灌能量造 成异常,保用外部回生电阻接在伺服 驱动器PC两端、PD两端开路。若使 用内部回生电阻,请将PD两端短路、 PC两端开路。
ECMA-C△13304 (3000W)
ECMA-E△1820S (2000W)
ECMA-E△1830S (3000W)
ECMA-E△1835S (3500W) ECMA-F△1830S (3000W)
D
ECMA-F△1845S (4500W)
ECMA-F118553 (5500W)
Revision Jun, 2013
编码器引出线
驱动器CN2
此端视图
1 蓝 T+
4 蓝/黑
T-
7 红/红白 DC+5V
台达伺服各系列区别

ASDA-AB系列產品特色本系列是台達進階泛用型之伺服驅動產品。
支援低、中、高三種慣量之伺服馬達,可解決客戶在不同扭力應用上的需求。
提供與ASDA-A系列相同的多種應用功能, 便利客戶在不同產業應用上使用,或是不同機型的性能提升。
支援標準Modbus通訊讀寫,可與台達PLC, HMI構成通訊控制架構。
本機種可適用於各式機械加工行業或產業機械。
產品規格‧輸出功率範圍:單相/三相≦1.5kW;三相 2kW ~ 3kW‧輸入電源:AC 100V ~ 115V (< 400W) , AC 200V ~ 230V (100W ~ 3kW)‧響應頻率為450Hz‧搭配增量型2500ppr光學式編碼器‧內建位置 / 速度 / 扭矩控制模式‧內含八組位置控制暫存器 (點對點定位控制)‧內藏多種應用控制模式(與ASDA-A系列相同)‧搭配從1000r/min到3000r/min額定轉速,不同慣量之伺服馬達‧提供煞車、油封等馬達選配件,便利不同產業應用‧支援標準Modbus通訊讀寫格式,介面支援RS-232/RS-485/RS-422應用實例工具機台之刀庫控制、分度裝配系統、封口機、送料機、雕刻機、車床、高速捲繞機、切割機ASDA-A2系列產品說明針對現今工控市場對於運動控制的高性能標準要求,滿足設備開發商和系統整合商對於精準定位控制的渴望,台達電子秉持著精益求精的態度,推出ASDA-A2高機能型伺服驅動系列產品。
內建運動控制模式,支援多種軸控操作需求,完全取代中型PLC的M otion功能;內含電子凸輪功能(CAM function),便利機台之行程規劃;ASDA-A2符合新型化的伺服產品發展,速度迴圈的響應頻率為1kHz,搭配20-bit 解析度編碼器,提供精準定位及平順控制特色。
台达 ASDA-A系列 伺服驱动器 应用技术手册

序言感谢您使用本产品,本使用操作手册提供ASDA-A系列伺服驱动器及ASMT系列伺服电机的相关信息。
内容包括:z伺服驱动器和伺服电机的安装与检查z伺服驱动器的组成说明z试转操作的步骤z伺服驱动器的控制功能介绍及调整方法z所有参数说明z通信协议说明z检测与保养z异常排除z应用例解说明本使用操作手册适合下列使用者参考z伺服系统设计者z安装或配线人员z试转调机人员z维护或检查人员在使用之前,请您仔细详读本手册以确保使用上的正确。
此外,请将它妥善放置在安全的地点以便随时查阅。
在您尚未读完本手册时,请务必遵守下列事项:z安装的环境必须没有水气,腐蚀性气体及可燃性气体z接线时禁止将三相电源接至电机U、V、W的连接器,一旦接错时将损坏伺服电机z必须确保接地良好z在通电时,请勿拆解驱动器、电机或更改配线z在通电运作前,请确定紧急停机装置是否能随时启动z在通电运作时,请勿接触散热片,以免烫伤如果您在使用上仍有问题,请咨询经销商或者本公司客服中心序言|ASDA-A系列安全注意事项ASDA-A系列为一开放型(open type)伺服驱动器,操作时须安装于屏蔽式的控制箱内。
本驱动器利用精密的反馈控制及结合高速运算能力的数字信号处理器(Digital Signal Processor, DSP),控制IGBT产生精确的电流输出,用来驱动三相永磁式同步交流伺服电机(PMSM)达到准确定位。
ASDA-A系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱动器、线材及电机都必须安装于符合UL环境等级1的安装环境最低要求规格)。
在接受检验、安装、配线、操作、维护及检查时,应随时注意以下安全注意事项。
标志「危险」、「警告」及「禁止」代表的涵义:意指可能潜藏危险,若未遵守可能会对人员造成严重或致命的伤害。
意指可能潜藏危险,若未遵守可能会对人员造成中度的伤害,或导致产品严重损坏,或甚至故障。
意指绝对禁止的行动,若未遵守可能会导致产品损坏,或甚至故障而无法使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达交流伺服ASDA-MS 系列
整合架构卓越效能
作为工业自动化的品牌,台达一直以来秉持着提供完整的自动化解决方案,在不同应用工艺以及不同行业领域,都能满足客户需求。
工业型机器人是工业自动化相当重要的基础产品,针对此产品的应用需求,台达一举推出工业型机器人解决方案,将关键产品包含控制器、伺服驱动、高速运动总线、泛用通讯界面等,整合成一台高实时性、高弹性且更具竞争力的机器人控制驱动一体机
ASDA-MS 系列( 以下简称MS 系列)。
创新整合设计
台达创新的设计概念将工业型机器人控制器以及伺服驱动整合于一身,从复杂的数学运算、平滑轨迹规划,到实时性高的伺服控制回路,完整的系统信息都整合在同一个控制核心中,提升了整套系统运算的实时性。
针对工业型机器人复杂的非线性系统,唯有如此整合性的设计,才能依据不同工业型机器人的姿态与运动轨迹,进行实时且完善的动态补偿,满足工业型机器人的高速、高精需求。
完善开发平台
MS 系列内置标准IEC61131-3 五种PLC 编辑语法及PLCopen 运动控制的完整功能块,提供台达机器人语言(DRL),建构完善的系统开发平台,客户
可依照实际应用,自行开发客制化、行业专精、制程相关的功能与程序。
通过泛用通讯界面连接工业型机器人外围的视觉、传感器、中控计算机等系统,搭配高速运动总线可扩展其他运动轴、移载轴等伺服系统,整合成一个完整的工业型机器人系统平台。
工业型机器人产业面对的是全球化的市场竞争,唯有提供完整的解决方案,提升竞争力以及强化客制化能力,才能满足多元的需求。
台达提供专业完善的工业型机器人解决方案,与您一起迎向多变的市场,共创新未来。
系统架构
完善工业型机器人解决方案
•整合工业型机器人控制器与伺服驱动器形成高性能与机器人控制驱动一体机
•提供泛用通讯界面,快速整合系统外围设备
•内置不同型态的工业型机器人模式,符合不同应用需求
•本体4 轴驱动,可搭配高速总线延伸为6 轴,提升系统的弹性度与扩展性
•支持标准IEC61131-3 PLC 5 种编辑语言以及PLCopen 运动功能模块•提供台达机器人语言,满足客户应用开发工艺
•支持G Code 输入,规划运动路径轨迹
友善的计算机端软件功能
•IEC61131-3 PLC 编程功能
•DRL 编程功能
•多元型态工业型机器人设定功能
•智能化工业型机器人系统校正功能
•实时监控示波器
•支持多种工业机器人,如:水平关节机器人与垂直多关节机器人等
产品特色
驱控一体机架构
驱控一体机整合控制器与伺服驱动于同一个控制核心,加快数据传递速度,提升整体控制系统实时性与效能,动态补偿工业型机器人运动非线性的特性,有效解决传统电控架构通过通讯接口取得数据所造成的延迟,达到高精度与高速度运动控制。
泛用通讯界面整合系统架构
MS 系列提供Ethernet、RS-485/232 等通讯界面能快速与系统外围进行整合,包含PLC、输送带、视觉系统及其他输送轴等,同时与中控计算机做数据交换,形成完整系统方案。
多元型态机械手臂控制
支持四轴SCARA、DELTA,且通过DMCNET 扩展2 轴,可支持六轴垂
直多关节机器人,及不同的机械手臂模块,客户可依据实际应用需求,自行选择正确的机械手臂模块,只须输入基本的机械手臂机构参数,系统即可生成对应的机械手臂算法,让客户快速进行操作,达到客户本身所需求的操作灵活性与便利性。
完善系统开发平台
•提供完善开发平台,客户可自行开发所需功能,满足多元应用工艺需求,提升自动化开发效益与二次开发附加价值
•结合台达自动化产品资源,快速整合工业机器人系统,打造完整自动化系统方案,满足不同行业应用需求
高阶运动控制功能
ASDA-MS 系列提供高阶运动控制功能,包含工业型机器人运动指令( 点对点、线性、圆弧等),及支持数值控制专用的G-code 标准指令,可依据不同应用进行开发。
内置路径优化功能,如:微小路径处理、进给率固定、减少路径轮廓误差等,提供优化解决方案。
成都永浩机电工程技术有限公司是台达产品经销商,专注于自动化过程控制,现场仪表设计、销售服务的现代化高新技术企业,公司引进德国先进的技术,开发艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代,自投入市场以来,广泛应用于石油、化工、电力、冶金、环保、制药、水处理等行业,获得了广大用户的一致好评。
公司主要产品包括:
流量仪表类:电磁流量计、涡街流量计、涡轮流量计、差压式流量计、超声波流量计、金属管浮子流量计、椭圆齿轮流量计、质量流量计及热式流量开关。
物位仪表类:压阻式液位变送器、电容式液位变送器、超声波液位计、雷达物位计等。
压力类仪表:压力变送器、差压变送器等。
工控类产品:西门子、台达、施耐德、罗克韦尔系列PLC,人机界面,伺服电机,变频器,工控机,成套系统集成。
出师表
两汉:诸葛亮
先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
然侍卫之臣不懈于内,忠志之士忘身于外者,盖追先帝之殊遇,欲报之于陛下也。
诚宜开张圣听,以光先帝遗德,恢弘志士之气,不宜妄自菲薄,引喻失义,以塞忠谏之路也。
宫中府中,俱为一体;陟罚臧否,不宜异同。
若有作奸犯科及为忠善者,宜付有司论其刑赏,以昭陛下平明之理;不宜偏私,使内外异法也。
侍中、侍郎郭攸之、费祎、董允等,此皆良实,志虑忠纯,是以先帝简拔以遗陛下:愚以为宫中之事,事无大小,悉以咨之,然后施行,必能裨补阙漏,有所广益。
将军向宠,性行淑均,晓畅军事,试用于昔日,先帝称之曰“能”,是以众议举宠为督:愚以为营中之事,悉以咨之,必能使行阵和睦,优劣得所。
亲贤臣,远小人,此先汉所以兴隆也;亲小人,远贤臣,此后汉所以倾颓也。
先帝在时,每与臣论此事,未尝不叹息痛恨于桓、灵也。
侍中、尚书、长史、参军,此悉贞良死节之臣,愿陛下亲之、信之,则汉室之隆,可计日而待也。
臣本布衣,躬耕于南阳,苟全性命于乱世,不求闻达于诸侯。
先帝不以臣卑鄙,猥自枉屈,三顾臣于草庐之中,咨臣以当世之事,由是感激,遂许先帝以驱驰。
后值倾覆,受任于败军之际,奉命于危难之间,尔来二十有一年矣。
先帝知臣谨慎,故临崩寄臣以大事也。
受命以来,夙夜忧叹,恐托付不效,以伤先帝之明;故五月渡泸,深入不毛。
今南方已定,兵甲已足,当奖率三军,北定中原,庶竭驽钝,攘除奸凶,兴复汉室,还于旧都。
此臣所以报先帝而忠陛下之职分也。
至于斟酌损益,进尽忠言,则攸之、祎、允之任也。
愿陛下托臣以讨贼兴复之效,不效,则治臣之罪,以告先帝之灵。
若无兴德之言,则责攸之、祎、允等之慢,以彰其咎;陛下亦宜自谋,以咨诹善道,察纳雅言,深追先帝遗诏。
臣不胜受恩感激。
今当远离,临表涕零,不知所言。