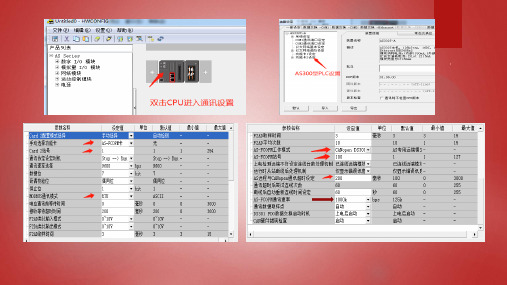
台达伺服与PLC之间接线及部份参数
台达PLC通讯控制伺服教程
以下
修改监控时间,延长通讯时间
-
原点回归伺服软件设置:(原点复归模式设置) 1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
-
原点回归伺服软件设置:(路径10设置) 1;点击原点复归模式 2;选择到路径10(路径10设置为回零点进行设置) 3;选TYPE路径型式 4;选位置命令 5;选运行速度 6;p621待机位给定目标位置
-
台达PLC以Canopen控制伺服
在线描硬件,
ቤተ መጻሕፍቲ ባይዱSDO自动配置
-
SDO配置内容
-
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
-
决对定位伺服软件设置: (决对定位路径1设置) 1;选择到路径10 2;选TYPE路径型式 3;选位置命令终点 4;选运行速度(选择PLC-PDO配置运行速度P5-75) 5;显示外部给定目标位置
-
-
-
定位控制时P6-03为位置来源
-
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
台达PLC_实例伺服控制实例参数设置及PLC程序

台达PLC_实例伺服控制实例参数设置及PLC程序一、伺服控制实例参数设置对于伺服控制的实例,需要设置控制器的参数,包括速度、位置、力矩等参数。
在台达PLC中,可以通过MODBUS RTU协议或RS485接口来实现参数的读写。
在控制器参数设置中,一些关键参数是需要特别注意的,包括伺服电机的额定电流、最大速度及加速度、位置锁定误差等。
参数设置的正确性对于伺服控制的精确性和安全性都有非常重要的影响。
伺服电机的参数设置也非常重要。
其中最为重要的参数是转矩常数、每转编码器数等。
这些参数的正确设置可以保证伺服电机的控制精度。
另外,伺服电机的额定电流和峰值电流也需要设置。
这些参数对于电机的工作效率、性能和寿命都有极大的影响。
为了更加深入地了解伺服控制器参数设置的过程,下面以一台伺服电机控制器为例进行具体说明。
首先,需要设置伺服电机的参数,包括转矩常数、每转编码器数、额定电流和峰值电流等。
接着,需要根据机器的实际运行情况,设置伺服电机的最大速度和加速度等参数。
这些参数的设置需要根据机器的实际运动情况和需求进行调整。
最后,需要设置位置锁定误差,以保证伺服电机可以准确地停在目标位置上。
二、PLC程序实例下面以一个伺服控制的PLC程序为例进行说明。
1、程序功能说明本程序的功能是通过PLC对伺服电机进行控制,保证电机可以精确地运动到目标位置。
具体实现方法是读取编码器的数据,然后与目标位置的数据进行比较,计算出电机需要运动的距离,然后根据伺服控制器的参数进行控制,使得电机能够精确地运动到目标位置。
2、程序流程图下图为程序的流程图:3、程序代码以下是本程序的PLC代码:(1)读取编码器数据M0.0 ENM0.1 INCM0.2 CLRM0.3 LDM0.4 ENM0.5 RET(2)计算电机需要运动的距离 C0 K1000D0 0D1 0L1:LDI M0.0R JZ L1CALL L2ADD D1 D2 D1(3)运动控制L2:CALL L3CDIV D13 D15 D0CDIV D14 D15 D1MUL D0 D1 D1MUL D2 D3 D3ADD D1 D3 D2LDI D11R JGE L4NEG D5 D5CPR C4 D0 D7R JN L6M OV 0 PORT2M OV 1 M0.1LDI C1M OV 1 K1M OVB 2 K2RETLDI C3M MOV 1 K250RET程序中通过伺服控制器的参数来实现电机的准确控制,保证最终能够达到目标位置。
台达DVP28SV11PLC控制台达B2伺服接线及程序说明
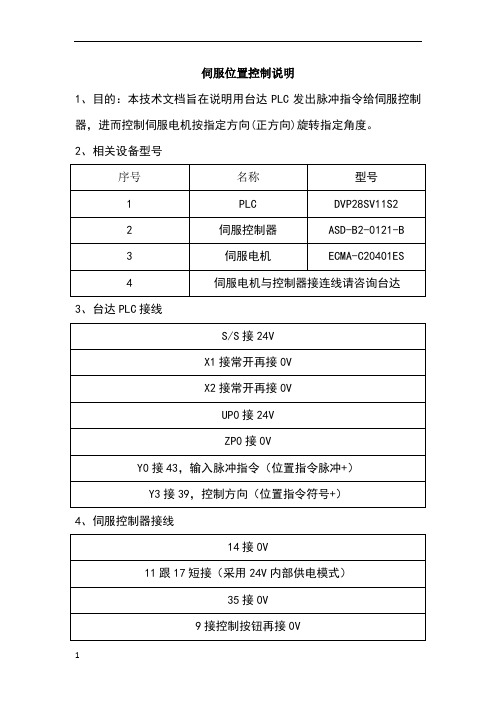
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。
台达DVP-PLC控制台达B2伺服脉冲速度模式下伺服电机延时正反转

台达DVP-PLC控制台达B2伺服脉冲速度模式下伺服电机延时正反转1、目的:本技术文档旨在说明用台达PLC使用DDRVI相对定位指令发出脉冲指令给伺服控制器,实现电机正反转,再延时一定时间后重复正反转。
当正常启动PLC跟伺服系统后,按下X1,则系统以2000HZ频率开始顺时针旋转,旋转5000个脉冲后随即开始逆时针旋转5000脉冲。
再延时15s后,开始顺时针、逆时针重复动作。
旋转方向通过修改脉冲输出值的正负进行控制,5000K代表顺时针旋转方向输出5000K,-5000K代表逆时针旋转方向输出5000K。
输出装置均为Y0,M1029表示Y0输出结束的标志位。
T0表示延时时间,可以通过修改前面的数值来修改延时时间。
区段一的两个MOV句用来与触摸屏用RS485协议通讯,若不通讯,可以直接删除。
2、相关设备型号3、台达PLC接线4、伺服控制器接线注:伺服电机与控制器采用专用配线连接5、PLC程序6、伺服控制器设置(位置模式)1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
(若设置P1-01为100,则方向为“-”方向,仅需改变设置P1-01)3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6.P0-02:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)7、相关照片图1 伺服接线图2 PLC接线图3 整体接线。
台达PLC控制伺服说明

14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
台达PLC实例伺服控制实例参数设置及PLC程序
台达PLC实例伺服控制实例参数设置及PLC程序首先,让我们了解一下什么是伺服控制。
伺服控制是一种可以精确控制运动位置、速度和加速度的控制方法。
伺服控制通常用于需要高精度运动控制的应用,如工业机器人、数控机床等。
对于台达PLC的伺服控制实例,我们将使用台达的伺服驱动器ASDA 系列和PLC编程软件TVP14,这是一种常用的组合。
以下是参数设置和PLC程序的详细说明:1.参数设置:-首先,将伺服驱动器与台达PLC进行连接,并确保连接线路正确无误。
-在PLC程序中,设置好驱动器的通讯端口和通信协议,以确保PLC 能够与伺服驱动器进行通信。
-设置伺服驱动器的型号和ID号,以便PLC能够正确识别和控制伺服驱动器。
-根据应用需求,设置伺服驱动器的运动参数,如速度、加速度、位置等。
这些参数可以根据实际应用进行调整,以达到最佳控制效果。
2.PLC程序:-在PLC编程软件中,创建一个新的PLC程序,并编写相应的逻辑代码。
-首先,使用PLC的输入来控制伺服驱动器的使能信号。
当使能信号为高电平时,伺服驱动器将启动,并开始接收运动指令。
-接下来,编写代码来控制伺服驱动器的运动。
可以使用PLC的输出来控制伺服驱动器的运行方向和速度。
-使用PLC的输入来读取伺服驱动器的状态信息,如位置、速度等。
这些信息可以用于采取相应的控制策略和判断伺服运动是否达到预期目标。
-最后,使用PLC的输出来控制伺服驱动器的停止和复位功能。
当停止信号为高电平时,伺服驱动器将停止运动,并回到初始位置。
通过以上的参数设置和PLC程序,您可以实现对伺服驱动器的精确控制。
您可以根据实际应用要求,进行相应的参数调整和控制逻辑设计,以满足您的需求。
伺服与plc网口通讯接线

伺服与plc网口通讯接线引言:伺服系统和PLC(可编程逻辑控制器)是工业自动化领域中常见的两种设备,它们的联合应用可以实现精确的运动控制和高效的逻辑控制。
在伺服系统与PLC之间建立通讯链接,是实现整个自动化系统的关键一步。
本文将探讨伺服与PLC网口通讯的接线方法,并对其一些技术细节进行讨论。
一、接线硬件概述在伺服与PLC之间建立通讯链接,最常见的方式是通过以太网进行连接。
利用以太网通讯,使得伺服系统可以与PLC进行快速、稳定地数据交换。
具体的接线方法有多种选择,下面介绍其中两种常见的接线方式。
1. 直接连接最简单的接线方式是将伺服和PLC直接连接在同一以太网交换机上。
通过设置各自的IP地址和子网掩码,使得伺服和PLC处于同一网络中。
这种方式的优点是接线简单,易于安装和维护。
然而,由于直接连接会在交换机上产生大量的网络流量,可能会影响到其他设备的通讯速度。
因此,当系统需要大量数据传输时,建议采用更高级的接线方式。
2. 通过HUB连接通过使用Hub进行连接是一种更高级的方式。
在这种方式下,伺服和PLC分别连接到Hub,由Hub进行数据的转发和控制。
通过这种方式,可以实现更高的传输速率和更稳定的通讯环境。
同时,还可以通过设置VLAN(虚拟局域网)来隔离不同设备之间的流量,提高网络安全性。
二、通讯协议选择PLC和伺服通讯的协议选择对于通讯的可靠性和效率至关重要。
在以太网通讯中,常用的协议有Modbus TCP、Ethernet/IP和Profinet等。
1. Modbus TCPModbus是一种简单且广泛应用的通讯协议,适用于伺服和PLC之间的数据读写。
Modbus TCP通过以太网进行通讯,可实现快速的数据传输。
该协议具有良好的兼容性和可靠性,因此被广泛应用于各类工业自动化系统。
2. Ethernet/IPEthernet/IP是一种工业以太网协议,它采用标准的TCP/IP协议进行通讯。
Ethernet/IP具有高效的数据传输能力和强大的网络管理功能,适用于大规模、复杂的工业自动化系统。
plc485口与台达伺服网口通讯

plc485口与台达伺服网口通讯现代工业生产中,自动化设备的应用越来越广泛,而PLC(可编程逻辑控制器)和伺服系统被广泛应用于自动化控制中。
PLC作为工业自动化的核心控制设备,与众多设备进行通讯,其中与伺服系统的通讯方式有多种选择,其中一种常用的方式就是通过PLC的485口与台达伺服的网口进行通讯。
PLC的485口通讯方式相对简单,而台达伺服的网口通讯方式更加灵活。
PLC的485口是一种串行通讯口,通过485总线可以连接多个伺服驱动器,实现多个伺服驱动器的同时控制。
而台达伺服的网口通讯方式则可以通过以太网连接多个伺服驱动器,通过局域网或互联网实现远程监控和控制。
通过PLC的485口与台达伺服的网口通讯,将二者的优势结合起来,可以实现更加灵活和强大的控制功能。
在PLC的485口与台达伺服网口通讯中,常用的通讯协议是Modbus协议。
Modbus协议是一种开放的通讯协议,广泛应用于工业自动化设备之间的数据交换。
通过Modbus协议,PLC可以读取和写入台达伺服的寄存器数据,实现对伺服系统的控制。
同时,通过Modbus协议,PLC与台达伺服之间可以进行实时数据的传输和监控,使得系统的运行更加可靠和高效。
在PLC的485口与台达伺服网口通讯中,需要配置一定的网络参数。
首先,PLC和台达伺服需要处于同一局域网中,确保网络连接的畅通。
其次,需要配置PLC和台达伺服的IP地址,确保彼此之间能够正确识别和通讯。
另外,还需要配置Modbus协议相关的参数,例如波特率、数据位、停止位等,确保通讯的正确进行。
值得注意的是,PLC的485口与台达伺服网口的通讯需要使用适配器。
适配器是一种物理设备,可以将PLC的485口信号转换为以太网信号,从而与台达伺服的网口进行通讯。
适配器的作用是实现不同通讯接口之间的互联互通,大大方便了PLC和伺服系统之间的数据交换。
除了适配器,还需要在PLC编程软件中进行相关配置。
PLC编程软件是一种专门用于编程和调试PLC程序的软件,通过该软件,可以设置PLC与台达伺服之间的通讯参数和数据传输方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三腳短接即可
伺服使能信號
PLC輸出
粉1 33 ARST
報警清除
PLC輸出
32 CWL 31 CCWL 30 EMGS
正極限 反極限
急停
接外部0V(參數修改后 此線可不接)
粉2 14 COM-
低電位基準
接外部0V
7 DO1+ 伺服ready(SRDY)
6 DO1-
PLC輸入 接外部0V
1 DO4+ 定位完成(TPOS)
26 DO4-
PLC輸入 接外部0V
白1 28 白2 27
DO5+
PLC輸入(常閉接點)
伺服報警(ALARM)
DO5-
接外部0V
藍1 44 藍2 19
OCZ GND
Z相信號
Z相 接外部0V
馬達旋轉一周所需脉衝數:X=160000M/N N=P1-44 M=P1-45 1/50<N/M<200
相關參數 脉衝+方向模式: P1-00=2 CW/CCW 模式:P1-00=1
參數設定:P215=122 參數設定:P216=123 參數設定:P217=121
=P1-44 M=P1-45 1/50<N/M<200
B 2
引腳 標示
紅1 37 /SIGN
39 SIGN
含義 方向/CW 差分電路使用
接線
特別說明
PLC普通輸出/高速輸 出
通常使用高速脉衝輸出
不連接
紅2 41 /PULSE
脈衝/CCW
PLC高速輸出
使用高速脉衝輸出
43 PULSE 差分電路使用
不連接
11 COM+ 輸出端口的電源端
綠1 17 VDD
內部24V電源