一种提取物体线形骨架的新方法
基于距离场的骨架细化算法
基于距离场骨架的细化算法摘要:骨架是现在物体识别的一种有效手段,保存和处理对象的拓扑信息,是图像分析的重要研究之一。
传统的距离场和基于图像求取的骨架难以保证连通,而细化所得的骨架受噪声影响较大,不能保证结果的准确性,但是细化在骨架识别中起到举重若轻的作用。
本文提出一种优良的骨架细化和骨架提取算法,将经典的距离变换和细化相结合,使骨架在原有识别的基础上更加的精确。
关键词:骨架提取;细化算法;距离场。
1引言骨架(Skeleton)是一种中轴变换用来描述物体的拓扑结构的主要手段之一,首先由Blum提出,它是一种线条状的几何体,线条位于物体的几何中心,有着和原物体相同的拓扑结构,在保持原物体的形状信息的同时,尽量减少了原物体的冗余信息。
骨架有着广泛的应用比如形状描述、文字识别、工程图处理、图像重建、压缩编码和红外图像识别等。
骨架的提取算法主要分为两类:一类是基于细化的算法,另一类是基于距离场的方法。
细化算法是采用迭代的手段不断的剥除目标的边界点,并且保留边界上满足骨架特性的点,直到没有多余的边界可以剥除,剩下的就是骨架。
这个方法在连续域是正确的,但由于图像是离散点,在向内推进过程中无法按照图像的收缩方向进行。
提取的骨架是连续的,但骨架的定位不确定,这两种细化算法在距离场中都对距离场中的脊线有所偏离。
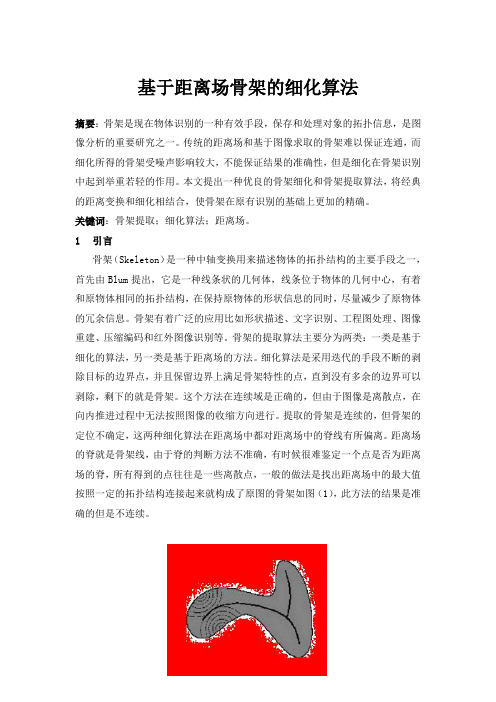
距离场的脊就是骨架线,由于脊的判断方法不准确,有时候很难鉴定一个点是否为距离场的脊,所有得到的点往往是一些离散点,一般的做法是找出距离场中的最大值按照一定的拓扑结构连接起来就构成了原图的骨架如图(1),此方法的结果是准确的但是不连续。
(1)2 基于细化的骨架提取图像的细化是对一个二值图像进行收缩的过程,按照原来的形状让其等比列变小,在连线域上即使收缩到很小的程度还是保持着原来的的形状。
根据细化过程的特点,便有人提出各种算法进行提取骨架,比如“烧草”算法,它的核心思想是,将目标内的所有点看做一个草原,同时从边界点火,再向目标内部蔓延,在蔓延的过程中,燃烧点重合的地方即为骨架点。
电子散斑干涉条纹骨架线提取的新方法

J N Xu —e g, RAO il g, L Hu iwe I e fn Ru—i n U a— i
( ho a he a i s,Phy is a Sc olofM t m tc sc nd Sofw a e E n ne i g, t r gi ern
La z o io o g Un v r i n h u Ja t n ie st y,La z o 3 0 0,Ch n ) n h u7 0 7 ia
维普资讯
第2 8卷 第 2 期
20 0 7年 3月 文 章 编 号 : 0 22 8 ( 0 7 0 — 2 10 1 0 — 0 2 2 0 ) 20 2 5
应
Hale Waihona Puke 用光学 V o .2 1 8. NO.2
M a . 00 r ,2 7
J u n lo p id Op is o r a fAp l t e c
电子 散 斑 干涉 条 纹 骨 架 线 提 取 的新 方 法
金 雪峰 ,饶 芮菱 ,鲁 怀 伟
( 州 交 通 大 学 数 理 与 软 件 工 程 学 院 ,兰 州 7 0 7 ) 兰 3 0 0
摘 要 : 电子散 斑干 涉条 纹的 强噪 声特性 使其 信噪 比过 低 , 常用 的图像二 值 化、 细化等 算 法对散 斑 干 涉条纹 的 骨架提 取都 存 在一 定 的不足 , 文章在 对散 斑 条 纹 图像 平 滑去 噪 、 比度增 强的预 处 对 理 基 础 上 , 其 进 行 边 缘 提 取 、 充 、 化 , 而得 到 干 涉 条 纹 的 中心 骨 架 线 , 出一 种 基 于 对 填 细 从 提 MAT AB 的散 班 图像 自动处 理算 法 。结果 表 明 : 中提 出的干 涉条 纹 的细 化方 法可 以准 确地 找 L 文 到骨 架线 , 为获得 面 内位 移场 的等位 移线 图提供 了一种新 方 法 。 关键 词 : 电子散 斑 干涉条 纹 ; 巴特沃 兹滤 波 ; 边缘检 测 ; a n C n y算 子 ; 子填 充 种
多边形骨架提取算法 python
多边形骨架提取算法 python
多边形骨架提取算法在计算机视觉和图像处理领域中被广泛应用,用于提取多边形的中轴线或骨架结构。
在Python中,有几种常
见的算法和库可以用来实现多边形骨架提取,下面我将从多个角度
介绍几种常见的方法。
1. Medial Axis Transform (MAT),中轴变换是一种常见的多
边形骨架提取算法。
在Python中,你可以使用scikit-image库来
实现MAT。
该库提供了medial_axis函数,可以直接对多边形进行
中轴变换处理。
2. Voronoi Diagram,沃罗诺伊图也可以用于多边形骨架提取。
你可以使用SciPy库中的spatial模块来计算Voronoi图,然后从Voronoi图中提取多边形的骨架结构。
3. Distance Transform,距离变换也是一种常见的多边形骨架
提取方法。
你可以使用OpenCV库或者scikit-image库中的
distance_transform_edt函数来计算多边形的距离变换,然后从中
提取骨架。
4. Skeletonization Algorithms,还有一些专门用于骨架提取的算法,比如Zhang-Suen算法、Guo-Hall算法等。
你可以在Python中实现这些算法,或者使用一些开源的图像处理库中已经实现好的算法。
在实际应用中,选择哪种算法取决于你的具体需求和多边形的特征。
每种算法都有自己的优缺点,需要根据具体情况进行选择。
希望以上信息能够帮助到你,如果有更多问题,欢迎继续提问。
骨架线算法-概述说明以及解释

骨架线算法-概述说明以及解释1.引言1.1 概述概述:骨架线算法(Skeletonization algorithm)是一种用于提取物体或图像形状中主要特征的计算方法。
它通过将图像或物体的边界区域简化为其主要骨架,从而实现对形状的抽象和表示。
骨架线算法在图像处理、模式识别、计算机视觉等领域具有广泛的应用。
骨架线算法的主要思想是通过去除图像中的冗余信息,保留物体或形状的主要结构和特征。
这种算法可以有效地减少数据量,简化图像表示,同时保持重要的拓扑关系和形状特征。
通过提取物体的骨架线,我们可以得到物体的主轴或中心线,从而更好地理解和分析对象的形态、结构和特征。
骨架线算法的原理通常基于图像的连通性和几何形状的局部特征。
常见的骨架线算法包括细化算法、距离变换算法、分水岭算法等。
这些算法可以根据不同的需求和应用场景选择合适的方法进行骨架线提取。
骨架线算法在许多领域都有广泛的应用。
在医学影像中,骨架线算法可以用于血管或神经的提取和分析,有助于辅助诊断和手术规划。
在图像识别和模式分类中,骨架线算法可以用于特征提取和形状匹配,提高图像的分类准确率。
此外,骨架线算法还在工程设计、地质勘探、数字艺术等方面具有重要的应用价值。
本文将介绍骨架线算法的定义、原理和应用。
通过对骨架线算法的深入讨论,我们可以更好地理解和应用这一算法,为相关领域的研究和应用提供指导和参考。
文章结构部分的内容可以按照如下方式撰写:1.2 文章结构本文按照以下结构进行组织和阐述:1. 引言在引言部分,我们将对骨架线算法进行一个概述,介绍其背景和基本概念。
我们将讨论骨架线算法在图像处理领域中的重要性和应用前景。
2. 正文正文部分主要分为三个部分进行论述。
2.1 骨架线算法的定义首先,我们将详细介绍骨架线算法的定义,并解释其核心思想和基本原理。
我们将探讨骨架线算法的起源以及它与其他相关算法的关系。
2.2 骨架线算法的原理在本部分,我们将深入讨论骨架线算法的原理。
骨架提取算法
骨架提取算法
骨架提取算法是一种常用的图像处理算法,它可以从图像中提取出物体的骨架,即物体的主要轮廓线条。
骨架提取算法在计算机视觉、图像识别、机器人等领域有着广泛的应用。
骨架提取算法的基本思想是将物体的轮廓线条缩小到一个像素宽度,然后通过一系列的操作,得到物体的骨架。
这个过程可以分为两个步骤:轮廓线条的细化和骨架的提取。
轮廓线条的细化是指将物体的轮廓线条缩小到一个像素宽度。
这个过程可以通过一些经典的算法来实现,比如Zhang-Suen算法、Guo-Hall算法等。
这些算法都是基于局部像素的形态学操作,可以将轮廓线条细化到一个像素宽度。
骨架的提取是指从细化后的轮廓线条中提取出物体的骨架。
这个过程可以通过一些经典的算法来实现,比如Medial Axis Transform 算法、Distance Transform算法等。
这些算法都是基于距离变换的思想,可以将轮廓线条转换成距离场,然后通过一些操作,得到物体的骨架。
骨架提取算法的优点是可以提取出物体的主要轮廓线条,可以减少图像处理的复杂度,提高图像处理的效率。
同时,骨架提取算法还可以用于物体的形状分析、物体的匹配等领域。
骨架提取算法的应用非常广泛,比如在计算机视觉领域,可以用于物体的识别、跟踪、分割等;在机器人领域,可以用于机器人的导航、路径规划等;在医学领域,可以用于医学图像的分析、诊断等。
骨架提取算法是一种非常重要的图像处理算法,它可以提取出物体的主要轮廓线条,可以用于物体的形状分析、物体的匹配等领域。
随着计算机视觉、机器人、医学等领域的不断发展,骨架提取算法的应用前景将会越来越广阔。
基于Delaunay三角网的等高线骨架提取算法
S ee o x r c i n a g rt k l t n e t a to l o ihm a e n t e De a n y b s d o h l u a t i n u a i n o o t u i e r a g l to f c n o r ln s
.
t e De a n y t in u a i n i t o u e . p r e t l e u t r v h tv ro s s e e o sc n b o r c l h l u a ra g l t i r d c d Ex e i n a s lsp o e t a a i u k lt n a ec r e ty o sn m r e t a t d, ih a e u e u o t e r a it i i lt r an mo e i g a d c r e p n i g d g t l e r i n l — x r c e wh c r s f lt h e l i d g t e r i d l n o r s o d n i ia r a n a a y sc a n t
生成 的 Dea n y三 角 网 , 平 三角 形 出发 , 用 三 lu a 从 利
择性 采样 都通过 采集 骨架 线信息 来确 保地形 模 拟 的
LU n W ANG — a Ga g。 Fu qu n
( ixn a nn &Re ac n tt t .,Lt . Ja ig3 4 5 , ia Ja ig 0 Chn )
Ab ta tBym e n ft ec n o rl e o c n tu tt etin ua e re ua ewo k ( N) mo e ,h sr c : a so h o t u i st o sr c h ra g lt d irg lrn t r n TI d lt e “lttin ls a eu u l e ea e tt esg i c n o o r p ia ra u ha i tp,ig , rv l y f ra g e ” r s al g n r t da h in f a tt p g a h c l e ss c shl o rd e o al , a y i a l e wh c e u t nt edso t n o h iia e r i d l g I h sp p r amig a h r c s igo “ lt ih r s lsi h it ri ft edgt l ranmo ei . nt i a e , i n t ep o e sn f fa o t n t
骨架线算法
骨架线算法全文共四篇示例,供读者参考第一篇示例:骨架线算法是一种用于提取对象骨架的计算机视觉算法。
在图像处理领域中,骨架线通常指物体的中轴线或中心线,是表示物体形状和结构的重要特征。
骨架线算法可以帮助识别物体的形状、轮廓和结构信息,对于数字化建模、医学图像处理、工程设计等领域有着广泛的应用。
骨架线算法的基本思想是从对象的边缘逐渐收缩,直到最终形成对象的中心线。
这个过程通常包括三个步骤:边缘提取、骨架化和细化。
通过图像处理技术提取出对象的边缘信息;然后,利用数学形态学等方法对边缘进行骨架化处理,得到初步的骨架;通过迭代细化算法对初步骨架进行进一步处理,获得更加精细的骨架线。
骨架线算法的主要优点包括:可以提取出对象的主要轮廓和结构信息,对于形状分析和识别具有较高的准确性和稳定性;可以减少图像数据的复杂度,节省存储和传输空间,便于后续处理和分析;骨架线还可以用于对象的比较和匹配,帮助识别不同对象之间的相似性和差异性。
在实际应用中,骨架线算法广泛应用于医学影像分析、工业检测、自动驾驶等领域。
在医学影像领域,骨架线算法可以帮助医生快速准确地识别病变部位、量化分析组织结构,辅助诊断和治疗。
在工业领域,骨架线算法可以用于产品设计、质量控制、零部件匹配等方面,提高生产效率和品质。
在自动驾驶领域,骨架线算法可以帮助车辆感知周围环境、规划路径,实现智能驾驶。
值得注意的是,骨架线算法虽然在图像处理领域有着广泛的应用,但也存在一些挑战和限制。
算法的鲁棒性和稳定性仍然需要进一步改进,对图像噪声、变形、遮挡等情况的处理效果有待提高;骨架线算法对于不规则形状和复杂结构的物体提取效果可能不理想,需要针对性优化和改进算法。
骨架线算法是一种有效的图像处理技术,可以帮助提取对象的骨架信息,对于形状分析、识别和匹配等领域有着广泛的应用前景。
随着人工智能、深度学习等技术的不断发展和应用,相信骨架线算法还会有更多的创新和突破,为图像处理领域带来更多的发展机会和挑战。
基于Voronoi图提取线状地物骨架的一种方法
了一种 基 于 Voo o 图快 速提取 线状地 物骨 架的 方法 ,并针 对 不 同的 边缘 采取 了不 同的方 案 rn i
以 保 证 提 取 的 骨 架 线 的 准 确 性 ,最 后 以福 州 市 区 内闽 江 部 分 河 段 的 骨 架 提 取 为 实 例 检 验 了该 方 法 的 有 效 性 ,并 分 析 了存 在 的 问题 ,提 出 了改 进 的 方 向 . 关 键 词 : 骨 架 ; V rn i ; 线 状 地 物 oo o 图 文 献 标 识 码 :A 文 章 编 号 : 17 —7 7 ( 0 7 30 8 —4 6 39 8 2 0 )0 —2 10
限度 地减 少 目标 存贮 记 录 中的冗 余 信息 ,是 一个受 到 广 泛关 注 的研 究课 题 ,前人 的相 关研 究 很 多 … . 李超 群在 详细分 析遥 感影 像 中线状 目标地 物 特征 的基础 上 ,提 出了一 种半 自动 提取 线状 目标 中心 骨架 线 的方 法—— 变 向跟踪 法 ,该方 法 能 够 有 效地 提 取 遥 感 图 像上 线 状 地 物 的 骨架 线 _ .曹铁 永 利 用 骨 2 J 架上 的点 ( 少在某 个方 向上 应处 于该 方 向对 象边 界 中心点 ) 的特点 ,从 多个 方 向对 细 化对象 进行 切 至 片 ,利用 这些切 片 中心点 集 作 为原 始 数 据 集 来快 速 产 生 对 象 骨架 j 3.Ni n a y a等 提 出 了一 种 r gn Ma y a 生 成带 有岛 的多边 形 V rn i oo o 图算法 ,并 应用 这种算 法来 提取 地物 的骨 架线 j 4.本文 讨 论 如何 利 用矢 量 数据 基于 V rn i oo o 图快速 提取 线状 地物 的骨 架 的有 关 问题 .主要 介 绍 骨架 与 V rn i 的关 系 ,从 oo o 图 理论 上 分析 了基 于 Voo o 图提取线 状地 物骨 架 的可行性 ,并通过 实 例验证 了方 法 的正确 性 . rn i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第XX卷第X期自动化学报Vol.XX,No.X 200X年X月ACTA AUTOMATICA SINICA Month,200X一种提取物体线形骨架的新方法刘俊涛1刘文予2吴彩华3原亮1摘要本文提出了一种提取物体线形骨架的新方法。
该方法首先计算物体距离变换的梯度,从而得到一个矢量场。
距离变换的梯度对提取物体线形骨架具有重要意义,我们据此获得物体内部的关键点。
其中,每一个关键点代表了物体的一个凸部分。
之后,我们用搜索梯度最短路径的方法连接关键点,从而得到物体的线形骨架。
本文方法得到的线形骨架能很好的反映物体拓扑和形状特征,并不易受边界噪声干扰。
此外,本文的方法克服了基于距离变换的骨架提取算法固有缺点,获得了具有良好连通性的骨架。
因此,基于本文方法得到的骨架能用于物体识别和匹配等领域。
对大量二维、三维物体的实验取得了令人满意的效果。
关键词线形骨架,距离变换,梯度中图分类号TP391.4A New Method of Extracting the Objects’Curve-SkeletonLIU Jun-Tao1LIU Wen-Yu2WU Cai-Hua3YUAN Liang1Abstract In this paper a new method of extracting the curve-skeleton of the objects is proposed.The gradient of the distance transform,which is a vectorfield and valuable for extracting curve-skeleton,is used to detect critical points inside the objects.Each critical point represents a convex segment of the object.Then,the critical points are connected through searching the shortest gradient path,and thus,the curve-skeleton of the object is obtained.The method proposed in this paper is insensitive to the boundary noise,and the topological and geometrical features of the object can be represented by the extracted curve-skeleton.Further more,compared with other methods based on distance transform,the method proposed in this paper guarantees the connectivity of the curve-skeleton.The extracted curve-skeleton can be applied to objects recognition and matching and so on.The results of experiments on large number of2D and3D objects are satisfied.Key words Curve-skeleton,Distance Transform,Gradient1引言骨架(Skeleton)又称中轴(Medial Axis),通常使用烧草模型[1]和最大球(圆)[2]模型来描述。
骨架有着与原物体相同的拓扑和形状信息,是一种性能优良的几何特征,能够有效的描述物体,因此,在物体识别、路径规划、医学工程[3]等领域多有应用。
一般而言,由二值图像表示的二维物体的骨架均由曲线连接而成,而由体素模型表示的三维物体的骨架则往往由一些曲面组成。
由于曲面的表示比较复杂,描述其特征比较困难,因此,尚需设法直接得到三维物体的线形骨架(Curve Skeleton),以利收稿日期XXXX-XX-XX收修改稿日期XXXX-XX-XX Received Month Date,Year;in revised form Month Date,Year 国家自然科学基金(60273099,60471022)资助Supported by National Natural Science Foundation of China (60273099,60471022)1.军械工程学院计算机工程系石家庄0500032.华中科技大学电子与信息工程系武汉4300743.军械工程学院装备指挥与管理系石家庄0500031.Dept.of Computer Engineering,Mechanical Engineer-ing Institute,Shijiazhuang,0500032.Dept.of Electronics &Information Engineering,Huazhong University of Science& Technology,Wuhan4300743.Dept.of Equipment Command &Management Engineering,Mechanical Engineering Institute, Shijiazhuang,050003DOI:10.1360/aas-007-xxxx 后续处理。
骨架提取算法大致可以分为两类。
一类是基于细化(Thinning)的方法[4,5],即在保持拓扑不变性的条件约束下,依据体素(像素)邻域信息设定准则,采用迭代的方法逐步剔除普通点,直到最后剩下骨架点。
细化算法生成的骨架难以保证准确性和光滑性[11],需要进一步调整。
另一类是基于距离变换的算法[6-10]。
这类方法先对物体进行距离变换,据此来寻找骨架点。
一般说来,基于距离变换的骨架提取算法获得的骨架点位置比较准确,但难以保证整个骨架的连通性。
文献[6]中提出了一种基于距离变换的方法,该方法除需要对物体进行距离变换外,还需要得到距每个体素点距离最近的边界点的坐标,据此建立标准确定骨架点。
该方法能得到线形骨架,但当物体分支比较细小时难以保证骨架的连通性。
文献[7]提出了一种新的基于距离变换的骨架提取方法。
该方法取距离变换值最大且靠近物体重心的点作为骨架生长的起始点。
之后按照覆盖、判断新分支数和生长新骨架点几个步骤进行迭代。
该方法得到的二维物体线形骨架具有很好的连通性,但不能得到三维物体的线形骨架。
广义势场方法[8,9]假定物体的边缘上聚集了均匀分布的同种电荷,这些2自动化学报XX卷电荷在物体内部产生了一个稳定的电场。
该方法首先选择物体边界上的凸点作为起始点,然后依照电场的方向移动起始点到场强为0的地方。
起始点的移动轨迹构成骨架的一个分支,最后连接所有分支得到骨架。
广义势场方法利用了不同于距离变换的矢量场,取得了很好的结果。
文献[10]对广义势场方法进行了改进,该方法将场强为0的点作为关键点,按照文献[8]中的力跟踪方法连接各个关键点,得到物体的核骨架,然后选择曲率较大的边界点继续生长骨架得到物体的层次骨架。
该方法得到的线形骨架具有很好的连通性,对边界噪声不敏感。
但是,由于需要计算广义势场,计算复杂度较高。
实际上,距离变换可看做一个标量场,而与其相关联的具有重要信息的矢量场是距离变换的梯度。
本文依据距离场及其梯度得到物体内部的一些关键点,用保证拓扑不变的方法连接这些关键点就得到了物体的线形骨架。
不同于传统的基于距离变换的骨架提取算法,本文的方法能很好的保证骨架的连通性。
此外,计算梯度时无需如同处理广义势场那样计算积分。
因此,本文的方法具有计算复杂度低的优点,同时,亦能处理一定的边界噪声。
2线形骨架提取本文提出的方法首先是对物体进行距离变换并得到距离场的梯度。
由于距离场的梯度是一个矢量场,且对提取物体线形骨架具有重要意义,因此我们以此为标准,获得物体中的关键点。
然后用保证拓扑不变的方法连接这些关键点,就得到了物体的线形骨架。
为了便于讨论,下面提到的物体均指离散化后的物体,即在三维空间中指的是用体素表示的物体模型(由多边形网格表示的三维物体需用体素化的方法得到体素模型),在二维空间中则对应一个二值图像。
下面详细介绍本文的方法。
2.1距离变换及其梯度距离变换即计算物体内部的体素(像素)到物体边界的最小距离。
根据计算距离的不同定义可以将距离变换分为欧氏和非欧氏两种。
非欧氏距离变换用棋盘距离替代欧氏距离,以减少计算量。
非欧氏距离变换是欧氏距离变换的一种近似,因此不能准确的得到物体的骨架点的位置。
本文采用文献[12]和[17]中提出的方法快速计算物体的欧氏距离变换。
通过距离变换我们得到了一个标量场–距离场。
物体的距离场和骨架之间有着某种联系。
按照骨架的最大圆(球)定义[2],骨架点处的距离变换值应该比其大多数相邻点的距离变换值要大。
如果把距离场看作高低起伏的地形,那么提取物体的骨架事实上是寻找距离场中的脊线。
图1(b)表示了图1(a)中物体的距离变换,深色处表示数值较小的位置。
可以看到,如果将距离场中的脊线提取出来则获得了物体的精确骨架。
(a)原物体(a)Original object(b)距离变换(b)Distance transform(c)距离变换梯度的模(c)|∇DT|图1原物体,距离变换和距离变换梯度的模Fig.1Original object,Distance transform and|∇DT|要获得距离场的脊线需要考察距离场的局部特征,此时,我们可以利用距离场的梯度。
以三维空间为例,设物体的距离场为DT(x,y,z),DT(x0,y0,z0)表示体素点p(x0,y0,z0)处距离变换的值。
距离场的梯度可以表示为:∇DT=(∂DT∂x,∂DT∂y,∂DT∂z)(1)进一步,我们计算梯度方向上的方向导数。
此时,方向导数取得最大值,即梯度向量的模。
如公式(2)所示:|∇DT|=(∂DT∂x)2+(∂DT∂y)2+(∂DT∂z)2(2)梯度方向上的方向导数实际上表示的距离场在梯度方向上的变化速率。
如前所述,骨架点实际是距离场的脊线,而距离场的脊线正是距离场的梯度发生突变的地方。
因此|∇DT|是相当重要的信息。
图1(c)是图1(b)中距离场梯度的模,深色处表示|∇DT|数值较小的位置。
对比这两个图可以发现,|∇DT|数值较小的位置正是距离场脊线的位置。
然而,不能简单的取|∇DT|数值较小的体素(像素)作为骨架点。