矩阵的正交分解与求矩阵全部特征值的QR方法
数值分析QR方法求矩阵特征值和特征向量
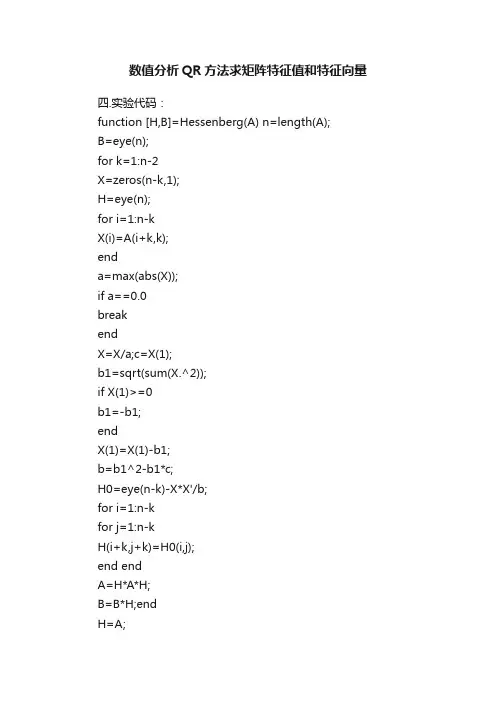
数值分析QR方法求矩阵特征值和特征向量四.实验代码:function [H,B]=Hessenberg(A) n=length(A);B=eye(n);for k=1:n-2X=zeros(n-k,1);H=eye(n);for i=1:n-kX(i)=A(i+k,k);enda=max(abs(X));if a==0.0breakendX=X/a;c=X(1);b1=sqrt(sum(X.^2));if X(1)>=0b1=-b1;endX(1)=X(1)-b1;b=b1^2-b1*c;H0=eye(n-k)-X*X'/b;for i=1:n-kfor j=1:n-kH(i+k,j+k)=H0(i,j);end endA=H*A*H;B=B*H;endH=A;一.实验题目:QR方法求矩阵的特征和特征向量二.设计目的:学会利用镜面变换进行矩阵的QR分解及利用将幂法求特征值和特征向量,熟悉Matlab编程环境。
三.设计原理:利用镜像变换将A相似变换为Hessenberg B矩阵。
记录变换矩阵。
运用Householder矩阵进行QR分解,QR方法为:B1=BB1=Q1R1B2=R1Q1....Bm=QmRmBm+1=RmQmBm+1与Bm相似,从而特征值相等。
再利用原点位移的反幂法求B(或A)的特征向量。
反幂法用来计算矩阵按模最小的特征值及其特征向量,也可用来计算对应与一个给定近似特征值的特征向量。
设A∈R n×n为非奇异矩阵,A的特征值依次记为|λ1|≥|λ2|≥|λ3|≥…≥|λn |,相应的特征向量为x1 ,x2,…,x n,则A-1的特征值为|1/λn|≥|1/λn-1|≥…≥|1/λ1 | ,相应的特征向量为x n ,x.所以计算A的按模最小的特征值λn的问题就是计算n-1,…,x1A-1的按模最大的特征值问题。
对于A-1应用幂法迭代(称为反幂法),可求得矩阵A-1的主特征值1/λn,从而求得A的按模最小的特征值λn。
正交变换与QR迭代矩阵特征值计算
正交变换在QR迭代中的优势与局限性
优势
正交变换可以保证QR迭代的稳定性和收敛性,同时能够避免直接处理特征值问题,简化计算过程。
局限性
正交变换需要构造一个正交矩阵,计算量较大,对于大规模矩阵计算效率较低。此外,对于某些特殊 类型的矩阵,QR迭代可能不是最优的方法。
04
矩阵特征值计算
特征值的基本概念
稳定性好
相较于其他特征值计算方法,正交变换与QR迭代具有较 好的数值稳定性,能够有效地抵抗计算过程中的误差累积 ,从而得到更可靠的结果。
并行化潜力
正交变换与QR迭代中的各个步骤可以独立进行,这使得 这些方法具有并行化的潜力,能够利用高性能计算资源加 速特征值计算。
正交变换与QR迭代在矩阵特征值计算中的未来发展方向
收敛性条件包括迭代向量的范数逐渐减小以及特征值与迭代向量的夹角逐渐增大等。
03
正交变换在QR迭代中的应用
正交化过程在QR迭代中的重要性
保证迭代过程的稳定性
通过正交化过程,可以消除QR迭代中的数值误差,提高计算精度 和稳定性。
避免特征值问题
正交变换可以将原矩阵转化为上三角矩阵,从而避免直接处理特征 值问题,简化计算过程。
特征值
矩阵的特征值是矩阵的一个重要属性,它表示矩 阵对某些向量具有特定的缩放能力。
特征向量
与特征值对应的非零向量。
特征多项式
用于求解特征值的方程。
特征值的计算方法
代数法
01
通过求解特征多项式来找到特征值。
迭代法
02
通过迭代过程来逼近特征析矩阵的谱来找到特征值。
特征值计算中的问题与挑战
正交变换与QR迭代矩阵 特征值计算
• 正交变换概述 • QR迭代算法介绍 • 正交变换在QR迭代中的应用 • 矩阵特征值计算 • 正交变换与QR迭代在矩阵特征值计算
3.3QR方法
(2)
c aaa~s2aa
1
0 0
12
(2)
(2)
2222
W1
(2(2))
nn22
(2)
a 1n (2)
aaaa((n222nn))(n22nn)
第r步:
若 air(r)(i r 1, r 2,, n)不全为零, 令 sr (0,,0, arr(r) ,, anr(r) )T
A (Hn1Hn2 H1)1 An H1H2 Hn1An 令 Q H1H2 Hn1, R An
则 A Q R 证毕
4、QR分解的实现
An Hn1Hn2 H1A
Q H1H2 Hn1
Q的计算:
令 Q1 I
Qr1 Qr H r , r 1,2,, n 1
c1
H 2 H1 A
H
2
0
0
a(2) 12
a(2) 22
(2)
a 1n (2)
a2n
a a (2) n2
(2) nn
v s2 c2 e2 s2 c2 e2 2
H2 I 2v vT
s2
(0,
a (2) 22
,,
an2
(3) nn
c2
W1~s2
0 0
(2)
c aaaaa
1
0 0
12
(2)
(2)
数值分析7.2矩阵的正交分解与求矩阵全部特征值的QR方法

但 x y ,则存在householder阵
2
2
UU T
H I2 U 2
2
使Hx y,其中U x y。 W
x
x y
y
证:若设W U ,则有 W 1,因此
U
2
I
H 2
2
I 2WW T
(x y) x y 2
( xT
yT
I )
UU T 2 U2
2
Hx
x
2
( x2 y) x y 2
2
k
)
,
H
k
(k 2
)
,
,
H
k
(k n
)
A(k 1)
1(
k
1)
,
(k 2
1)
,
,
(k n
1)
a(2) 11 0
a(2) 1k
Hk
A(k )
Hk
0
a(k) kk
0
0
a(k) nk
a(2) 1n
a(k kn
)
a(k) nn
H
(
k1
k
)
,
H
k
(k 2
)
,
,
H
k
(k n
)
a1(12) 0 0 0
迭代格式
Ak Qk Rk Ak 1 RkQk
(k 1, 2, ).
将A A1化成相似的上三角阵(或分块上三角阵),
从而求出矩阵A的全部特征值与特征向量。
由A A1 Q1R1 ,即Q11 A R1。 于是A2 R1Q1 Q1 AQ1 ,即A2与A相似。
同理可得,Ak A (k 2, 3, )。 故它们有相同的特征值。
数值分析实验报告——基本QR算法求全部特征值
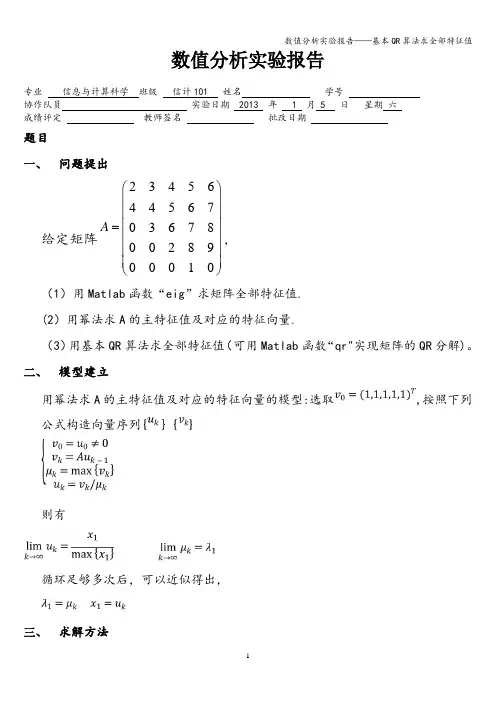
数值分析实验报告专业信息与计算科学班级信计101 姓名学号协作队员实验日期2013 年 1 月5 日星期六成绩评定教师签名批改日期题目一、问题提出给定矩阵2345644567036780028900010A⎛⎫⎪⎪⎪=⎪⎪⎪⎝⎭,(1)用Matlab函数“eig”求矩阵全部特征值.(2)用幂法求A的主特征值及对应的特征向量.(3)用基本QR算法求全部特征值(可用Matlab函数“qr"实现矩阵的QR分解)。
二、模型建立用幂法求A的主特征值及对应的特征向量的模型:选取,按照下列公式构造向量序列{}{}则有循环足够多次后,可以近似得出,三、求解方法(1)A=[2 3 4 5 6;4 4 5 6 7;0 3 6 7 8;0 0 2 8 9;0 0 0 1 0];a=eig(A)(2)pmethod。
mfunction [l,v,s]=pmethod(A,x0,eps)if nargin==2eps = 1.0e-6;endv = x0;%v为主特征向量M = 5000; %迭代步数限制m = 0;l = 0;for(k=1:M)y = A*v;m = max(y);%m为按模最大的分量v = y/m;if(abs(m — l)<eps)l = m; %到所需精度,退出,l为主特征值 s = k;%s为迭代步数return;elseif(k==M)disp('迭代步数太多,收敛速度太慢!’); l = m;s = M;elsel = m;endendend(3)function l = rqrtz(A,M)%QR算法求矩阵全部特征值%已知矩阵:A%迭代步数:M%求得的矩阵特征值:lA = hess(A);for i=1:MN = size(A);n = N(1,1);u = A(n,n);[q,r]=qr(A—u*eye(n,n));A = r*q+u*eye(n,n);l = diag(A);end四、输出结果(1)a = 13。
QR基本法和位移QR法矩阵特征值求解
实验一:编程实现以下科学计算算法,并举一例应用之。
QR基本法和位移QR法矩阵特征值求解1.QR基本法算法说明:QR基本算法是求矩阵特征值的最有效和应用最广泛的一种方法方法,其基本依据是以下两个定理:1)设A是n阶矩阵,其n个特征值为λ1、λ2、…λm,那么存在一个酉矩阵U使得U T AU是以λ1、λ2、…λm为对角元的上三角矩阵。
2)设A是n阶实矩阵,那么,存在一个正交矩阵Q,使得Q T AQ为一个准上三角矩阵,它的每一个对角元是A的一个特征值,对角元上的二阶块矩阵的两个特征值是A的一对共轭复特征值。
QR基本算法的过程如下:给定循环步数M,A T=A,k=1,2,…M,计算:A k=Q k R kA k+1=R k Q kQR基本算法有如下的收敛性质:如果A的特征值满足|λ1|>|λ2|>|λ2|≥…≥|λm|,则QR基本算法产生的矩阵序列{A k}基本收敛到上三角矩阵(特别,当A为对称阵时,收敛到对角阵),对角元素收敛到A的特征值。
在MATLAB中变成实现的QR基本算法的函数为:qrtz功能:QR基本算法求矩阵全部特征值。
调用格式:l=qrtz(A,M).其中,A为已知矩阵;M为迭代步数;L为矩阵A的全部特征值。
QR基本算法的流程图:l=qrtz(A,M)QR基本算法的MATLAB程序代码如下:function l=qrtz(A,M)for i=1:M[q,r]=qr(A);A=r*q;l=diag(A);endtask11.mformat longA=[1,5,6;4,7,0;8,11,3]l=qrtz(A,20)disp('¾«È·½â')l=eig(A)运行过程和结果:2.位移QR算法位移QR法是为了加快QR算法的收敛速度,其算法的迭代过程如下:给定循环步数M,A1=Hessenberg(A),k=1,2,…M,选择μk,然后计算:A k-μk I=Q k R kA k+1= Q k Q k+μk I一般μk的选择有以下两种考虑方法:(1) 选μk =μk ,即瑞利商位移;(2) 迭代过程中,如果子矩阵的两个特征值为实数时,选最接近a k n,n 的那个作为μk ,即威尔森位移瑞利商位移QR 法流程图如下:在MATLAB 中编程实现的瑞利商位移的QR 算法的函数为:rqrtz 。
QR方法
QR方法QR方法是求任意矩阵的全部特征值的一种有效方法,它是JACOBI方法的推广。
基本思想利用矩阵的QR分解,通过逆序相乘产生对原矩阵的一系列正交相似变换,使其变化为一个近似的上三角矩阵来求全部特征值。
这里QR分解是指将矩阵化为一个正交矩阵Q和一个上三角矩阵左乘的形式。
构造原理实对称矩阵可用正交相似变换将其化为对角形矩阵,但对非对称矩阵,一般用正交相似变换化不成对角矩阵,但SCHUR分解定理给我们一个有关这方面的结果。
定理3。
(实SCHUR分解定理)设矩阵A∈R n*n,则存在一个正交矩阵Q∈R n*n,使Q T AQ=其中每个B ii是1*1或2*2的小矩阵,若B ii为1*1的,其元素就是A的实特征值,否则B ii的特征值是A一对共轭复特征值。
此定理的证明可参阅文献[3]。
定理3指出了求矩阵A的全部特征值也可用正交相似变换的方法来做,正交相似变换的结果虽然不是对角矩阵,而是分块三角形矩阵,但它同样能很方便地求出全部特征值,有关一般矩阵的正交相似变换,我们不加证明地给出一个结论。
定理4。
设非奇异矩阵A∈R n*n,且有n个不同的特征值,记A=A(1)。
如果对整数k,有矩阵A(k)的QR分解为A(k)=Q k R k,则令A(k+1)=Q T k A(k)Q k,当k→∞时有A(k)本质上收敛于分块上三角形矩阵,这里“本质上收敛”指A(k)的主对角线上的元素或子块有确定的极限,其它元素或子块不管是否有极限。
此定理给出了求解一般矩阵全部特征值的方法。
由定理3,A(k+1)=(Q1Q2....Q k)T A(Q1Q2....Q k),令,则Q k也是正交矩阵,A(k+1)=Q T k A(k)Q k说明A(k+1)也是原矩阵A的正交相似变换,从而A(k+1)与A有相同的特征值,n任意,此外,由A(k)=Q k R k,则有Q T k A(k)= Q T k A(k)R k=R k,故有A(k+1)=Q k R k,这说明A(k+1)可直接交换Q k与R k的乘积顺序得到,于是可的如下QR算法。
用qr方法求矩阵 的全部特征值例题
用qr方法求矩阵的全部特征值例题矩阵的特征值问题是矩阵理论中的重要问题之一,QR方法是一种常用的求解矩阵特征值的方法。
本文将通过一个具体的例题,介绍如何使用QR方法求矩阵的全部特征值。
一、问题描述给定一个$n\timesn$矩阵$A$,我们需要求出其全部特征值。
矩阵的特征值通常可以通过求解矩阵的特征多项式来得到。
对于实对称矩阵,我们可以通过对角化矩阵的方法来求解特征值。
但对于一般矩阵,我们需要使用其他方法,如QR方法。
二、QR方法原理QR方法是基于矩阵的QR分解原理,将原矩阵分解为一个正交矩阵和一个上三角矩阵的乘积。
通过这个分解,我们可以将原矩阵的特征多项式转化为一个简单的多项式,从而方便地求解特征值。
三、例题及解答【例题】给定一个$3\times 3$矩阵:$A=\begin{bmatrix}1&2&3\\0&-2&4\\0&-1&2\end{bmatrix}$要求求出该矩阵的全部特征值。
【解法】1. 将矩阵A进行QR分解,得到正交矩阵$Q$和上三角矩阵$R$:$A=QR$2. 计算$Q^TAQ$的特征多项式,并求出全部特征值。
3. 将上三角矩阵$R$代入特征多项式中,得到原矩阵A的特征值。
【代码实现】(使用MATLAB)```matlab% 定义矩阵AA = [1 2 3; 0 -2 4; 0 -1 2];% 进行QR分解[Q, R] = qr(A);% 计算Q^TAQ的特征多项式,并求出全部特征值[eigvals,~,~] = eig(Q^TAQ);eigvals = real(eigvals); % 取实部作为特征值% 将上三角矩阵R代入特征多项式中,得到原矩阵A的特征值eigenvalues = diag(R) ./ (diag(R)+eigvals);```【结果】经过以上步骤,我们可以得到原矩阵A的全部特征值为:$\lambda_1=2.75+0. 866i,\lambda_2=2.75-0.866i,\lambda_3=4$。
特征向量 qr分解
特征向量 qr分解特征向量是线性代数中的一个重要概念,它与矩阵的特征值密切相关。
特征向量是矩阵在一维向量空间上的非零向量,当这个向量与矩阵相乘时,仅发生伸缩而不发生旋转。
特征向量与特征值的计算是矩阵分析中较为复杂的问题之一。
特征向量的计算可以通过QR分解来实现。
QR分解是将一个矩阵分解为一个正交矩阵Q和一个上三角矩阵R的过程。
通过QR分解,一个矩阵可以表示为A = QR,其中Q是一个正交矩阵,R是一个上三角矩阵。
在QR分解中,我们可以使用Gram-Schmidt正交化过程来计算特征向量。
Gram-Schmidt正交化过程是一种通过线性组合的方式将线性无关的向量组转化为正交向量组的方法。
假设我们有一个线性无关的向量组{v1, v2, ..., vn},我们可以通过以下步骤进行正交化计算:1.初始化:令v1' = v1,u1 = v1'/ ||v1'||,其中u1是单位向量。
2.递推:对于每一个向量vi,i > 1,计算:vi' = vi - proj(u1, vi) - proj(u2, vi) - ... - proj(ui-1, vi)ui = vi'/ ||vi'||其中,proj(u, v)是向量v在向量u上的投影,可以通过内积计算。
3.循环:重复步骤2,直到所有的向量都被转化为正交向量。
通过Gram-Schmidt正交化过程,我们可以得到一组正交基{u1,u2, ..., un},可以使用这组正交基来表示原有的向量组。
同时,这组正交基的长度并不一定相等,不同的向量可能有不同的模长。
在计算特征向量时,我们可以使用QR分解中的计算结果。
假设我们要计算矩阵A的特征向量,我们可以进行以下步骤:1.计算A的QR分解:A = QR,其中Q是一个正交矩阵,R是一个上三角矩阵。
2.令A' = RQ,将A的特征向量转化为A'的特征向量。
方法求矩阵全部特征值
方法求矩阵全部特征值求解矩阵的全部特征值是一个重要的问题,它在线性代数和数值计算中都有广泛的应用。
在本文中,将详细介绍几种方法来求解矩阵的全部特征值,包括特征值分解方法、幂迭代方法、QR方法、Jacobi方法和带位移的QR方法。
特征值是一个矩阵的最重要的性质之一,它描述了矩阵的行为和性质。
特征值可以用于计算矩阵的条件数、正交变换、矩阵的相似性和对角化等。
求解矩阵的全部特征值可以通过特征值分解来实现。
特征值分解是将一个矩阵分解成一个对角矩阵和一个特征向量矩阵的乘积。
根据特征值分解的定义,可以得到以下公式:A=QΛQ^(-1)其中A是一个n×n的矩阵,Λ是一个对角矩阵,Q是一个n×n的正交矩阵,^(-1)表示矩阵的逆。
通过特征值分解,可以求解矩阵的全部特征值和对应的特征向量。
特征值分解的方法有很多种,比如QR方法、Jacobi方法和带位移的QR方法。
幂迭代是一种求解矩阵最大特征值和对应特征向量的迭代方法。
幂迭代的基本思想是通过不断迭代矩阵的幂次来逼近最大特征值和对应特征向量。
幂迭代的过程可以通过以下公式表示:x(k+1)=Ax(k)其中x(k)表示第k次迭代的特征向量,A表示待求解的矩阵。
幂迭代的收敛性取决于一个非零初始向量的选择和特征值的大小。
当初始向量与最大特征值对应的特征向量接近时,幂迭代可以得到最大特征值的逼近值。
通过迭代可以不断逼近最大特征值,同时得到对应特征向量。
QR方法是一种求解实对称矩阵全部特征值的方法,它通过迭代将矩阵变换为上三角矩阵。
QR方法的基本步骤包括QR分解、矩阵相似变换和迭代。
在每一次迭代中,矩阵A都被变换为一个上三角矩阵R,并且特征值逐步靠近对角线的元素。
Jacobi方法是一种通过旋转矩阵将矩阵对角化的方法。
Jacobi方法的基本思想是通过多次相似变换将矩阵的非对角元素逐步置为零,使得矩阵对角化。
Jacobi方法的关键步骤是选择旋转角度和旋转矩阵,通过旋转操作将非对角元素置为零。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
推导:x ( x1 , x2 ,L , xn )T 0
y ( x1 ,L , xk1 , k , 0,L , 0)T
n
1
k sign( xk )( xi2 )2 ,
ik
sign(
xk
)
1 1
xk 0 xk 0
U (k ) x y (0,L , 0, xk k , xk1 ,L , xn )T
1
Hk I k
U (k ) (U (k ) )T
其中
k
1 U (k )TU (k ) 2
k ( k
xk )
特别,取k 1.
x ( x1, x2 ,L , xn )T Rn , x 0, 可构造H阵,
n
1
其中 i sign( xi ) x 2 sign( xi )( xk2 )2 ,
k 1
1 sign( xi ) 1
xi 0 xi 0
U x y x iei ( x1,L , xi i ,L , xn )T ,
构造初等反射阵
H
I 2WW T
I
2
UU T U2
I
1 UU T
使Hx y 1e1 (1 , 0,L , 0)T Rn
n
1
其中
1 sign( x1 ) x 2 sign( x1 )(
x
2 i
)
2
,
i 1
sign(x1 )
1 1
x1 0 x1 0
U (1) x 1e1 ( 1 x1 , x2 ,L , xn )T ,
可构造初等反射阵
变换阵. H
1 2w12 2w2w1
L
2w1w2 1 2w22
L
L L L
2wnw1 2wnw2 L
2w1wn 2w2wn
L
1
2wn2
T
例:W
1 2
0
1 2
R3 ,||W ||2 1
1
H I 2WW T I 2
2 0 1
1 2
0
1 2
2
0 0 1
解 : 3 sign( x3 ) x 2 4 0 4 1 3,因x3 2 0,
故取K 3 3 于是y 3e3 Ke3 (0, 0, 3, 0)T ,
U x y (2, 0, 5,1)T , 3( 3 x3 ) 3(3 2) 15
1UTU 2
11 0 10 2
H1 I 2WW T
I
2
U1U1T U1 2
I
1
U1U1T
有H1 x y 1e1
其中
1
1 2
U1T U1
1 2
(( x1
1 )2
x22
...
xn2 )
1 2
(2 x11
2
2 1
)
1( x1
1)
例:已知向量x (2, 2,1)T , 试构造初等反射阵 使y Hx最后一个元素为零。
解 k 2,构造H2
5 2 5
H2
5
1 2
5
0
0
0 (4 2 5) (2 5)
H I 1 UU T
1
0
1
0
0
15 10 0 10 5
2
0
5
14
2. 构造H阵,将向量x ( x1 ,L , xk , xk1 ,L , xn )T 的后面n k个分量约化为零(1 k n)。
即:任给定x ( x1, x2 ,L , xn )T 0, 构造Hk Rnn , 使
1
2 sign( x2 )( x22 x32 )2 5
U (2) (0, 2 x2 , x3 )T (0, 2 5,1)T
2 2 ( x2 2 ) 5 2 5
于是 H2 x ( x1 , 2 , 0)T (2, 5, 0)T
计算 H2 ,
பைடு நூலகம்H2
I
1
2
U (2) (U (2) )T
有Hx y iei
其中
1 UTU 2
1 2
(
x12
... ( xi
i )2
L
xn2 )
1 2
(2xi i
2 i2
)
i ( xi
i
)
例 已知向量x (2, 0, 2,1)T , 试构造Householder阵, 使Hx Ke3 , 其中e3 (0, 0,1, 0)T R4 , K R。
2w1wn 2w2wn
L
1
2wn2
(3)镜映射 几何意义
平面 方程 W T x 0 x
若 x , Hx (I 2WW T )x x 2WW T x x
若 y , Hy H( x kW ) x k(I 2WW T )W
x kW 2kWW TW x kW y
xT y yT x
1. Householder变换可以将给定的向量变为一个 与任一个ei Rn(i 1, 2,L , n)同方向的向量。
即:x ( x1, x2 ,L , xn )T Rn , x 0, 可构造H阵,
使Hx
y
iei
(0, ..., 0, i , 0,L
, 0)T Rn
W y x kW
x
y x kW
H阵的作用:
定理 设两个不相等的n维向量x, y Rn , x y,
但 x y ,则存在householder阵
2
2
UU T
H I2 U 2
2
使Hx y,其中U x y。 W
x
x y
y
证:若设W U ,则有 W 1,因此
U
2
I
H 2
2
I 2WW T
第7章 矩阵特征值问题
k 1,2,3,
1. Householder变换与矩阵的正交分解
一、初等反射阵(Householder变换阵)
定义 设非零向量W Rn ,W (w1, w2 ,L , wn )T , 且满足条件 W 1,形如
2
H I 2WW T
的n阶方阵称为初等反射阵, 或称为Householder
0
1
0
1 0 0
H阵的性质: (1)非奇异 det(H ) 1
(2)对称正交 H HT HH T H 2 (I 2WW T )(I 2WW T ) I 4WW T 4WW TWW T I
H
1 2w12 2w2w1
L
2w1w2 1 2w22
L
L L L
2wnw1 2wnw2 L
(x y) x y 2
( xT
yT
I )
UU T 2 U2
2
Hx
x
2
( x2 y) x y 2
2
( xT yT )x
x2(x
y)( xT x x y
2
yT x)
2
因为 x y 2 ( xT yT )( x y) 2( xT x yT x)
2
代入上式后即得到Hx y Q xT x yT y,