并联机床
6-PUS并联机床的动态特性分析
i n i t i l a p o s i t i o n a n d o r i e n t a t i o n f o r t h e m o d a l a n a l y s s i . T h e m o d l a s h a p e s c o r r e s p o n d t o s i x m a s t e r d e g r e e o ft h e P T M re a g o t nd a a c c o r d i n gt o t h e m t h e P T M’ S v i b r ti a o n c h ra a c t e r i s t i c s a n d s t i f f  ̄s s d 加. 6 t i o n a r e s u m m a r & e d An d b a s e d o n t h e m o d l a na a l si y s t h e h a r m o n i c r e s p o n s e a n a l si y s s i c a r r i e d o u t o n t h e P T M, nd a t h e r e s p o se n c u F v e s i n t h e d i r e c t i o n s f X, o Y nd a Zo f t h e P T Ma re o b t a i n e d r e s p e c t i v e l y . he T c h ra a ct e r s i t i c s O n h a r m o n c i r e s p o n s e ft o h e P T Ma re d s i c  ̄s e d , a n dt e h a n t i - v i b r t a on i p e 咖丌 n 帆c e o ft h e P M T u n d e r f o F c e s s i f u r t h e r t e s t e d , w h i c h C n a b e r e f e r e n c e d t o t h e o p t i m a l es d  ̄ n a n d d y n a mi c d e s i g n o n
机械毕业设计395并联机床实验台总体结构设计
第1章绪论1.1课题背景与意义为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(ParallelMachineTool),又称虚(拟)轴机床(VirtualAxisMachineTool)或并联运动学机器(ParallelKinematicsMachine)。
并联机床实质上是机器人技术与机床结构技术结合的产物,其原型是并联机器人操作机。
与实现等同功能的传统五坐标数控机床相比,并联机床具有如下优点:刚度重量比大:因采用并联闭环静定或非静定杆系结构,且在准静态情况下,传动构件理论上为仅受拉压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
响应速度快:运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动平台获得很高的进给速度和加速度,因而特别适于各种高速数控作业。
环境适应性强:便于可重组和模块化设计,且可构成形式多样的布局和自由度组合。
在动平台上安装刀具可进行多坐标铣、钻、磨、抛光,以及异型刀具刃磨等加工。
装备机械手腕、高能束源或CCD摄像机等末端执行器,还可完成精密装配、特种加工与测量等作业。
技术附加值高:并联机床具有“硬件”简单,“软件”复杂的特点,是一种技术附加值很高的机电一体化产品,因此可望获得高额的经济回报。
目前,国际学术界和工程界对研究与开发并联机床非常重视,并于90年代中期相继推出结构形式各异的产品化样机。
1994年在芝加哥国际机床博览会上,美国Ingersoll铣床公司、Giddings&Lewis公司和Hexal公司首次展出了称为“六足虫”(Hexapod)和“变异型”(V ARIAX)的数控机床与加工中心,引起轰动。
此后,英国Geodetic公司,俄罗斯Lapik公司,挪威Multicraft公司,日本丰田、日立、三菱等公司,瑞士ETZH和IFW研究所,瑞典NeosRobotics公司,丹麦Braunschweig公司,德国亚琛工业大学、汉诺威大学和斯图加特大学等单位也研制出不同结构形式的数控铣床、激光加工和水射流机床、坐标测量机和加工中心。
哈量新一代并联机床INKS—EXE700
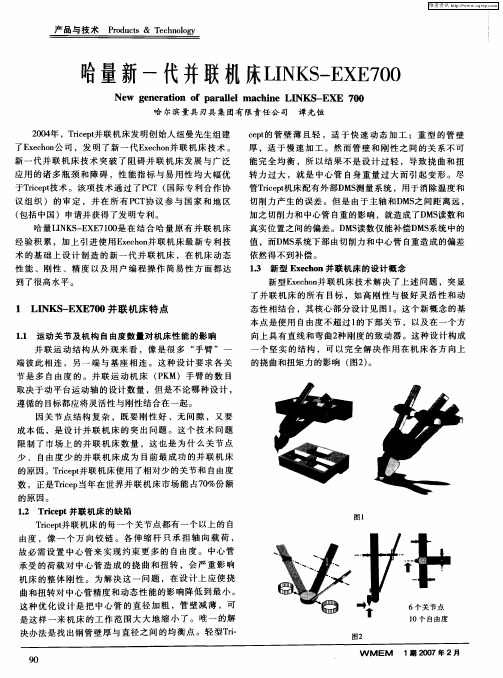
c p的 管 壁 薄 且 轻 ,适 于 快 速 动 态 加 工 ;重 型 的管 壁 et
厚 ,适 于慢 速 加 工 。然 而 管 壁 和 刚 性 之 间 的关 系不 可 能 完 全 均衡 ,所 以结 果 不 是 设 计 过 轻 ,导 致 挠 曲和 扭 转 力 过 大 ,就 是 中 心管 自身 重 量 过 大 而 引 起 变形 。尽
承 受 的荷 载 对 中心 管 造 成 的挠 曲和 扭 转 ,会 严 重 影 响
机 床 的整 体 刚 性 。 为解 决 这 一 问题 ,在 设 计 上 应 使 挠 曲 和扭转 对 中心管 精 度 和动 态性 能 的影 响 降低 到 最 小 。 这 种优 化 设 计 是 把 中心 管 的直 径 加 粗 ,管 壁 减 薄 ,可 是 这 样 一来 机 床 的工 作 范 围大 大 地 缩 小 了 。唯 一 的 解
一
1 L NKS EX 7 0并 联 机 床 特 点 I - E0
11 运 动 关节及 机构 自由度数 量对 机床 性能 的影 响 .
并 联 运 动 结 构 从 外 观 来 看 ,像 是很 多 “ 手臂 ”一 端 彼 此相 连 ,另 一 端 与 基 座 相 连 。这 种 设 计 要 求 各 关 节 是 多 自由度 的 。并 联 运 动 机 床 ( K P M) 手 臂 的 数 目 取 决 于动 平 台运 动 轴 的设 计数 量 ,但 是 不论 哪 种 设计 ,
哈 尔滨量 具 刃具集 团有 限责任 公 司 谭 光恒 2 0 年 ,T i p并 联 机床 发 明创 始人 纽曼 先生 组 建 04 r et c 了E e h n 司 ,发 明 了新 一代 E eh n 联 机 床 技 术 。 xc o 公 xc o 并 新 一 代并 联 机床 技 术 突 破 了 阻碍 并 联 机 床 发 展 与 广 泛 应 用 的诸 多 瓶 颈 和 障碍 ,性 能指 标 与 易 用 性 均 大 幅 优 于T i p技术 。该项 技 术通 过 了P T ( 际专 利合 作 协 r et c C 国 议 组 织 ) 的 审 定 ,并 在 所 有 P T 议 参 与 国 家 和 地 区 C协 ( 包括 中 国) 申请 并 获得 了发 明专利 。 哈 量L N S E 7 0 是 在 结 合 哈 量 原 有 并 联 机 床 I K — XE 10 经验 积 累 ,加上 引 进使 用 E eh n 联机 床 最 新专 利技 xc o 并 术 的基 础 上 设 计 制 造 的新 一 代 并 联 机 床 ,在 机 床 动 态 性 能 、刚性 、精 度 以及 用 户 编 程 操 作 简 易 性 方 面 都 达
并联机床的关键技术
化 。这 种 新 型 机 床 完 全 打 破 了 传 统 机 床结 构 的 概念 ,抛 弃 了 固 定 导 轨 的 刀 具 导 向方 式, 克服 了传统 机 床 刀具 作 业 自由度 偏 低 、 设 备 加 工 灵 活 性 和 机 动 性 不 够 等 固 有 缺 陷 , 用 了多杆 并 联机 构 驱 动 , 大提 高 了 采 大 机 床 的刚 度 , 实 现 多坐 标 联 动 数控 加 工 、 可 装 配 和 测 量 多 种功 能 ,使 加 工精 度 和 加 工 质量都有较大的改进 。
工 业 技 术
并联 机 床 的 关键 技 术 ①
汪 哲 能
( 阳财经工 业职 业技 术学院机 械工程 系 衡
湖 南衡阳
4 0 2 2 0 ) 1
摘 要: 并联 机床 是一种新一 代的机床 , 是一 种知识 密集型设备 , 是现代机 器人技术和现 代数控机床技 术结合 的产物 。 自其 1 9 9 4年在 美 国芝加哥机床展上 首次面世 即被誉 为是 “ 1 纪的机床 ” 成为机床 家族 中最有生命 力的新成 员。并联机床作 为机 床技术和机 器人技术 2 世 , 相结合 的产物 , 与传统结 构机床 相比 有很 大的不 同, 具有很 多的优点 , 这一领域 有许 多关键技 术需要进行研 究和解 决。 在 关键词 ; 机床 并联机床 虚拟轴机床 关键技术 中图分类号 : G 6 T 6 文献标 识码 : A 文章编号 : 6 2 3 9 ( o 8 1 () 0 8 0 1 7 - 7 12 o ) o c 一0 6 — 1 并联机床( a al c ie T os , P r l lMa h n o l 又 业从 事各 种类 型 的 S e e ) t wa t机床功 能 部件 r 在 国外 ,从 并 联 机 床 的 设 计 到 制 造 已 称并 联结构 机床(aallSr cue - P rl tut rd Ma 研究 、开 发 、生 产 与销 售 , 志 了并 联 机床 经 实 现 了计 算 机 的 虚拟 设计 和仿 真 。在 虚 e 标 c i e T os 、虚拟 轴机床( r u l h n o l) Vit a Ax s 商 品 化 时 代 的 开 始 。 i 拟 环 境 下 可 以 实 现 机 床 的 模 型 构 建 ,在 模 Ma hi e c n To l) 也 曾被称 为六条腿机 床 、 os , 此后 , 世界各国纷纷成立专业从事 S e r 型 构 建 中可 以对 模 型 中 的 参 数 ,如杆 长 和 twa t 六足虫 ( x p d ) He a c s 。并 联机床 是基 于空 间 机床 研 究 、开 发工 作 的相 关公 司 、基 地 , 如 驱 动 器 的 种 类 型 号 、 机 床 的 总 体 平台 类 型 并联机构 S e r 平 台原理开 发的 , t wa t 以空 间 美 国的 MI T、NI T、ORNL、S S NL/NM 、 等 进 行 设 定 , 可 以 实 现 虚拟 加 工 仿 真 。 并 并联 机构 为 基础 ,充分 利 用 计 算 机 数 字 控 S /CA 等 。使并 联机 床 的研 究 、开 发进 2 NL 2并 联机 床的运 动 学设 计研 究 . 制的 优势 , 以软 件取 代 部 分硬 件 , 电气装 入 了 快 速 发 展 时 期 ,取 得 了 许 多 令 人 耳 目 以 并 联 机 床 运 动 学 设 计 包 括 工 作 空 间 定 置 和 电子 器件 取 代 部 分 机 械 传 动 ,使 将近 心 的研 究成 果 , 产 品不 断 涌 现 。 新 义 与描 述 、 工 作 空 间分 析 与综 合 。 两 个 世纪 以 来 以 笛 卡 尔 坐标 直 线位 移 为 基 到 了 2000年 前 后 , 联机 床在 运 动学 并 工 作 空 间是 评 价 动 平 台实 现 位 姿 的 能 础 的机 床 结 构 和 运 动 学 原理 发生 了根 本 变 原 理 、 机 床 设 计 方 法 、制 造 工 艺 、控 制 技 力 的主 要 标 准 。工 位 奇 异 性 研 究 主要 研 究
6-UPU型并联机床刀具轨迹控制系统研究的开题报告
6-UPU型并联机床刀具轨迹控制系统研究的开题报告开题报告:一、选题依据随着工业制造的不断发展,机床刀具轨迹控制系统的研究也日益重要。
其中,6-UPU型并联机床刀具轨迹控制系统是一种比较先进的机床控制系统之一,其控制精度高,运动速度快,具有较强的适应性和灵活性,广泛应用于航船、汽车等领域中。
二、研究目的本课题旨在研究6-UPU型并联机床刀具轨迹控制系统,在探索其控制算法、运动学建模、系统结构设计等方面的基础上,加强对该系统的理论研究和实践应用,提高其性能和效率,以促进制造业的发展。
三、研究内容1. 6-UPU型并联机床刀具轨迹控制系统的工作原理和结构设计分析;2. 基于六自由度并联机构的运动学建模和运动规划算法研究;3. 基于无迹卡尔曼滤波器的姿态估计算法研究;4. 刀具路径规划和控制算法的研究;5. 6-UPU型并联机床刀具轨迹控制系统的仿真与验证。
四、研究意义通过对6-UPU型并联机床刀具轨迹控制系统的研究,可以提高机床切削加工的准确性和效率,促进工业制造的发展。
此外,该研究也可以为机械制造、智能制造等领域的发展,提供科学支撑和技术支持。
五、研究方法本研究将采用文献研究、实验研究和仿真模拟等方法,在理论研究和实践应用两个方面开展研究。
六、研究进度安排1. 阶段性目标:(1)完成6-UPU型并联机床刀具轨迹控制系统的结构设计与分析;(2)完成六自由度并联机构的运动学建模和运动规划算法的研究;(3)完成基于无迹卡尔曼滤波器的姿态估计算法的研究;(4)完成刀具路径规划和控制算法的研究;(5)完成6-UPU型并联机床刀具轨迹控制系统的仿真与验证。
2. 时间安排:(1)第一阶段:完成研究方案的制定与开题报告,用时1周。
(2)第二阶段:完成6-UPU型并联机床刀具轨迹控制系统的结构设计与分析,用时2周。
(3)第三阶段:完成六自由度并联机构的运动学建模和运动规划算法的研究,用时3周。
(4)第四阶段:完成基于无迹卡尔曼滤波器的姿态估计算法的研究,用时2周。
并联机床图片
论
并联机床
传统机床为串联结构,存在悬臂部件,不易 获得高的结构刚度;另外,其组成环节多,结构 复杂,限制了加工精度和 速度的提高。
在2O世纪9O年代中期 问世的并联机床,正是为 解决传统机床存在的问题 而进行的一种新的尝试。
《数 控 原理》
绪
论
并联机床 是机器人技术、 机床结构技术、 现代伺服驱动 技术和数控技 术相结合的产 物,被称为 “21世纪的机 床”,具有很 大的开发潜力 和广泛的应用 前景。
《数 控 原理》
绪
论
嗣后,美国 Ingersoll推出 了VOH1000 (立式)和 HOH600(卧 式)型加工中 心,它们在结 构上得到了较 大的改进,从 “内铣”改为 “外铣”。右 图为VOH 1000.
《数 控 原理》
绪
论
HOH 600
《数 控 原理》
绪
论
Hexa 6X立式五坐标高速铣床
• 欧洲第一 台商品化 的并联机 床。由欧 共体Esprit 高科技研 究计划资 助,有4 家德国的 单位参加。
《数 控 原理》
绪
论
Linapod立式加工中心
• 德国 斯图 加特 大学 机床 控制 研究 所 ISW
《数 控 原理》
绪
论
SKM400型卧式加工中心
• 德国 Heck ert公 司
《数 控 原理》
《数 控 原理》
绪
论
并联机构的特点
• • • • • • • • 载荷/质量比大 响应速度快 便于模块化设计 布局形式灵活多样 控制复杂 工作空间相对较小 灵活度差 与串联结构互为ຫໍສະໝຸດ 充(对偶关系)《数 控 原理》
绪
论
传统机床与并联机床的综合性能比较
毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
六足并联机床技术特点简介
、
技术性能、 结构
1 . 机械结构简单
由六根 可变长度杆取代传统结构 的 、 、 、 曰坐标导轨 y zA、
型 口通信 电缆 ( 2 。由于煤系统 共有 2台翻车机 , 了进一 图 ) 为
有可操作性 , 且总费用可降至 1 万元左右 。
3改 造 过 程 .
商用微机通过 18 一K 7 4 T专用 串行通信卡与 P C /5 L 5 0处理 2 器进行通信 ( 1。 图 ) 采用了联想集团的商用 电脑 , 型号奔月 20 , 0 0
PI 3 18 ID3 ,2 M内存 ; I 液晶显示器 , T 6E K B G U S型号 型号 5 0 C X L N;P ,
≈ 1 m Oo f 3. .t 5 s、
兼容机带通信 卡 18一 K 74 T配 18一c 74 P通信 电缆 ,可实现 与 P C处理 器 的通信 ,而 翻 车机 P C的远 程 通信 接 口恰 好 与 L L 18一 K 7 4 T相 匹配 , 因此 , 采用商用微机加 专用接 口在技术上 具
() 4 电主轴 : 额定 功率 1k 额定转速 10 10 0/ i ; 4 w; 0 ~ 0 0 r n 额 m 定转矩 1O m; N・ 主轴规格 B 4 。 I T 0 () 5 数控转 台 : 中心高度 10 6 mm; 夹盘直径 2 0 m。 5m
固 设 一 与 幢 26o _ 理 维 0 l 0N0
—j隧
维普资讯
和转 台 , 了许多环节 , 于维护与保 养。 减少 便 2 . 结构刚度高 机架采用 了框架结构 , 另外在加工过程 中, 无论 向哪个 方向 运动 , 六根杆分别 承受一部分载 荷 , 因此 , 刚度 重量 比高 于传 统 的数控机床。 3 . 七轴数控联动 六根杆与数控转 台构成 了七轴联动 的数控系统 ,可实现六 轴数控 联动机床 的功能 , 特别 适合加 工复杂 曲面 , : 如 叶片 、 叶 轮、 螺旋桨及复杂模具 的型腔 。 4工件定位方便 .
并联机床运动学自标定方法研究
并联机床运动学自标定方法研究机床运动学自标定方法是现代制造技术中重要的研究领域之一、并联机床作为一种特殊的机床结构,其运动学参数标定更加复杂。
本文将对并联机床运动学自标定方法进行研究,并进行详细介绍。
首先,我们需要了解并联机床的基本结构和运动学模型。
并联机床由多个平行连杆组成,每个连杆由旋转副连接,形成一个闭链运动系统。
在运动学模型中,需要确定每个连杆的长度和连接角度,以及工作台的位置和姿态。
这些参数决定了机床的运动学特性。
然而,并联机床的运动学参数往往无法直接测量,因此需要通过自标定方法来求解。
自标定方法的核心思想是通过机床的运动状态和姿态数据,在已知的参考点或者已知位置的情况下,通过数学模型和优化算法,反推机床自身的运动学参数。
目前,关于并联机床运动学自标定方法的研究有很多,下面将介绍几种常见的方法。
第一种方法是基于传感器数据的自标定方法。
该方法通过传感器测量机床的运动状态和姿态数据,如位置、速度、加速度等,然后将这些数据作为参数输入到数学模型中,通过优化算法求解机床的运动学参数。
该方法的优点是适用范围广,可以用于各种类型的并联机床。
缺点是需要准确的传感器测量数据,对传感器的要求较高。
第二种方法是基于机器视觉的自标定方法。
该方法利用摄像头或其他视觉传感器获取机床的运动状态和姿态数据,然后通过图像处理和计算机视觉算法,提取特征点或轮廓线,进而求解机床的运动学参数。
该方法的优点是非接触性,适用于各种环境和工况下的机床标定。
缺点是对图像处理和计算机视觉算法的要求较高。
第三种方法是基于强化学习的自标定方法。
该方法利用强化学习算法,在已知的参考点或已知位置下,通过多次尝试和优化,不断调整机床的参数,使得机床的运动状态和姿态数据与真实值尽可能接近。
该方法的优点是自动化程度高,对机床本身的要求较低。
缺点是求解时间较长,需要大量的试验数据。
总结来说,并联机床运动学自标定方法是一项复杂且具有挑战性的任务。
研究人员可以根据具体情况和需求选择合适的自标定方法,同时结合机床的特点和性能进行优化和改进。
哈量新一代并联机床LINKS_EXE700
2004年,Tricept并联机床发明创始人纽曼先生组建了Exechon公司,发明了新一代Exechon并联机床技术。
新一代并联机床技术突破了阻碍并联机床发展与广泛应用的诸多瓶颈和障碍,性能指标与易用性均大幅优于Tricept技术。
该项技术通过了PCT(国际专利合作协议组织)的审定,并在所有PCT协议参与国家和地区(包括中国)申请并获得了发明专利。
哈量LINKS-EXE7100是在结合哈量原有并联机床经验积累,加上引进使用Exechon并联机床最新专利技术的基础上设计制造的新一代并联机床,在机床动态性能、刚性、精度以及用户编程操作简易性方面都达到了很高水平。
1LINKS-EXE700并联机床特点1.1运动关节及机构自由度数量对机床性能的影响并联运动结构从外观来看,像是很多“手臂”一端彼此相连,另一端与基座相连。
这种设计要求各关节是多自由度的。
并联运动机床(PKM)手臂的数目取决于动平台运动轴的设计数量,但是不论哪种设计,遵循的目标都应将灵活性与刚性结合在一起。
因关节点结构复杂,既要刚性好、无间隙,又要成本低,是设计并联机床的突出问题。
这个技术问题限制了市场上的并联机床数量,这也是为什么关节点少、自由度少的并联机床成为目前最成功的并联机床的原因。
Tricept并联机床使用了相对少的关节和自由度数,正是Tricep当年在世界并联机床市场能占70%份额的原因。
1.2Tricept并联机床的缺陷Tricept并联机床的每一个关节点都有一个以上的自由度,像一个万向铰链。
各伸缩杆只承担轴向载荷,故必需设置中心管来实现约束更多的自由度。
中心管承受的荷载对中心管造成的挠曲和扭转,会严重影响机床的整体刚性。
为解决这一问题,在设计上应使挠曲和扭转对中心管精度和动态性能的影响降低到最小。
这种优化设计是把中心管的直径加粗,管壁减薄,可是这样一来机床的工作范围大大地缩小了。
唯一的解决办法是找出钢管壁厚与直径之间的均衡点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并联机床 : 是指用并联机构作为进给传动机构的数字控制机床.与传统机床相比并联机床具有刚度重量比大、响应速度快、对环境适应性高、技术附加值高等优点该机床具有以下特点1.并联机构仅有6个关节,10个自由度,刚性、动态性能及高速性能大幅提高。
2.提出了最新并联机床校准和标定技术:能够校准并联机床所有参数,是世界第一个在误差补偿方面现数控机床相同的并联机床。
3.并联机床下平台主轴无论处于加工范围的任何位置,其动态特性都保持高度一致,为最佳切削参数的选择提供了保证。
4.机床加工效率更高,加工产品尺寸范围更大。
机床在有效工作空间内可实现5~6面及全部复合角度的位置加工,适合用于敏捷加工;需一次装夹即可完成5~6面的复杂异型件及复合角度孔和曲面的加工等,可广泛用于航天航空、船舶、国防、汽车、大型模具、发电设备等大型复杂零件的自由曲面加工。
用该机床组成的生产线,可大幅度的减少机床台数,减少辅助时间。
产业化哈量集团计划采取两种方式在国内推广使用该产品和实现产业化。
一是独立开展市场营销工作,向全球的终端用户提供完整的机床和解决方案。
重点向航空航天、核电力设备、船舶、高速列车及汽车领域提供该产品。
二是向EXECON公司技术在中国和全球的集成许可商提供该机床的核心模块,由集成商向用户提供完整的机床,或与这些公司共同合作,向全球的用户提供完整的机床和解决方案。
并联机床(又称虚拟轴机床)是由机械机构学原理引用过来的,机构学里将机构分为串联机构和并联机构,串联机构的典型代表是机器人,传统机床的布局实际上也是串联机构。
理论上串联机构具有工作范围大,灵活性好等特点,但精度低,刚性差,作为机床,为提高精度和刚性,不得不将床身、导轨等制造得宽大厚实,由此导致了活动范围和灵活性能的下降。
为了解决上述矛盾,在20世纪80年代后,一大批学者开始致力于并联机构的研究,提出了并联机床的概念。
并联机床的典型代表是Stewart平台结构,即由六根可伸缩杆和动平台构成,可实现较高的动态特性,但工作范围小。
为解决这一问题,研究者把并联机构与串联机构结合起来,取得高动态性能和大的工作空间,其典型代表是瑞典的NOUSE公司的Tricepts机床。
1994年芝加哥国际机床展览会后,许多大学和企业加入到并联机床的应用研究开发之中,如美国Giddings & Lewis公司、Ingersold公司、Hexel公司,德国的Siemens公司、Mikromant 公司,日本的东芝公司、丰田公司、日立公司、三菱公司,俄罗斯的Lapic公司等。
当时在国际上对并联机床做得最好的是瑞典的NOUSE公司,到2003年,该公司已经销售出300余台。
1994年后,我国的高校、科研院所和企业也开展了并联机床的研究工作,主要有哈工大与哈量集团共同研制的加工叶片的并联加工中心,该项目获得2005年度中国机械行业科技进步二等奖;清华大学和齐齐哈尔第二机床集团联合研制的加工水轮机叶片的龙门式混联机床,另外还有天津大学、燕山大学、中科院沈阳自动化所、北京航空航天大学、东北大学、北京理工大学等,也都开展了并联机床的研制工作,并取得了一定的成绩。
2004年,原NOUSE公司总裁卡勒纽曼先生与他的原总设计师成立了新的EXECON公司,推出了新型的并联机床,并致力于该技术在全世界以发放生产许可证的方式的推广工作。
INGERSOLL公司的并联机床并联机床的特点、研究现状及展望类别:行业知识并联机床是空间机构学、机械制造、数控技术、计算机软硬技术和CAD/CAM技术高度结合的高科技产品。
本文介绍了它的特点和研究现状,并总结出了并联机床的八个研究方向。
并联机床(Parallel Machine Tools),又称并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),也曾被称为六条腿机床、六足虫(Hexapods)。
并联机床是基于空间并联机构Stewart平台原理开发的,是近年才出现的一种新概念机床,它是并联机器人机构与机床结合的产物,是空间机构学、机械制造、数控技术、计算机软硬技术和CAD/CAM技术高度结合的高科技产品。
它克服了传统机床串联机构刀具只能沿固定导轨进给、刀具作业自由度偏低、设备加工灵活性和机动性不够等固有缺陷,可实现多坐标联动数控加工、装配和测量多种功能,更能满足复杂特种零件的加工。
自其1994年在美国芝加哥机床展上首次面世即被誉为是“21世纪的机床”,成为机床家族中最有生命力的新成员。
编辑本段并联机床的特点整体而言,传统的串联机构机床,是属于数学简单而机构复杂的机床,而相对的,并联机构机床则机构简单而数学复杂,整个平台的运动牵涉到相当庞大的数学运算,因此虚拟轴并联机床是一种知识密集型机构。
这种新型机床完全打破了传统机床结构的概念,抛弃了固定导轨的刀具导向方式,采用了多杆并联机构驱动,大大提高了机床的刚度,使加工精度和加工质量都有较大的改进。
另外,由于其进给速度的提高,从而使高速、超高速加工更容易实现。
由于这种机床具有高刚度、高承载能力、高速度、高精度以及重量轻、机械结构简单、制造成本低、标准化程度高等优点,在许多领域都得到了成功的应用,因此受到学术界的广泛关注。
由并联、串联同时组成的混联式数控机床,不但具有并联机床的优点,而且在使用上更具实用价值。
随着高速切削的不断发展,传统串联式机构构造平台的结构刚性与移动台高速化逐渐成为技术发展的瓶颈,而并联式平台便成为最佳的候选对象,而相对于串联式机床来说,并联式工作平台具有如下特点和优点:结构简单、价格低机床机械零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、虎克铰、球铰、伺服电机等通用组件组成,这些通用组件可由专门厂家生产,因而本机床的制造和库存成本比相同功能的传统机床低得多,容易组装和搬运。
结构刚度高由于采用了封闭性的结构(closed-loop structure)使其具有高刚性和高速化的优点,其结构负荷流线短,而负荷分解的拉、压力由六只连杆同时承受,以材料力学的观点来说,在外力一定时,悬臂量的应力与变形都最大,两端插入(build-in)次之,再来是两端简支撑(simply-supported),其次是受压的二力结构,应力与变形都最小的是受张力的二力结构,故其拥有高刚性。
其刚度重量比高于传统的数控机床。
加工速度高惯性低如果结构所承受的力会改变方向,(介于张力与压力之间),两力构件将会是最节省材料的结构,而它的移动件重量减至最低且同时由六个致动器驱动,因此机器很容易高速化,且拥有低惯性。
加工精度高由于其为多轴并联机构组成,六个可伸缩杆杆长都单独对刀具的位置和姿态起作用,因而不存在传统机床(即串联机床)的几何误差累积和放大的现象,甚至还有平均化效果(averaging effect);其拥有热对称性结构设计,因此热变形较小;故它具有高精度的优点。
多功能灵活性强由于该机床机构简单控制方便,较容易根据加工对象而将其设计成专用机床,同时也可以将之开发成通用机床,用以实现铣削、镗削、磨削等加工,还可以配备必要的测量工具把它组成测量机,以实现机床的多功能。
这将会带来很大的应用和市场前景,在国防和民用方面都有着十分广阔的应用前景。
使用寿命长由于受力结构合理,运动部件磨损小,且没有导轨,不存在铁屑或冷却液进入导轨内部而导致其划伤、磨损或锈蚀现象。
Stewart平台适合于模块化生产对于不同的机器加工范围,只需改变连杆长度和接点位置,维护也容易,无须进行机件的再制和调整,只需将新的机构参数输入。
变换坐标系方便由于没有实体坐标系,机床坐标系与工件坐标系的转换全部靠软件完成,非常方便。
Stewart平台应用于机床与机器人时,可以降低静态误差(因为高刚性),以及动态误差(因为低惯量)。
而Stewart平台的劣势在于其工作空间较小,且其在工作空间上有着奇异点的限制,而串联工作平台,控制器遇到奇异点时,将会计算出驱动装置无法达成的驱动命令而造成控制误差,但Stewart平台在奇异位置会失去支撑部分方向的力或力矩的能力,无法完成固定负载对象。
编辑本段并联机床操作程序1、用本机床前、必须首先熟悉本机床的结构、各手柄的功用和操作方法,使用前应用油枪对准各油杯逐一加油,并检查各夹紧机构是否处于夹紧状态及电器设备是否正常;2、主轴转速的变换主轴变速是通过三个塔形轮进行,主轴转速从1600LPm~3000LPm,以适用不同的切削加工需要。
(见标牌)变速时可松开电机支杆的锁紧螺钉,变动皮带在轮槽的位置后拉紧,再锁紧电机支杆,即可工作;3、进给系统操作主轴的快速进给松开左侧缩紧手柄,搬动操作手柄,即可实现主轴的快速进给;3工作台的纵横进给松开锁紧手炳,摇动手轮,即可实现工作台的纵横进给运动;4、机头的升降松开立柱夹紧手柄,摇动立柱座上的升降手把,可实现主轴箱的升降;5、铣削本机床配有铣卡头一套,可装上立铣刀进行铣削,若铣削较大平面时,可购买M3#端铣刀与之配用;6、钻削(扩、铰)主轴内锥孔为莫氏号,选用不同莫氏号的变径套以适应各种直径的钻削、扩孔作业;7、攻丝本机若配有JSN12型丝锥夹头,可实现逆转、过载保护及调正扭矩等功能。
攻丝时主轴转速应选取550rPm以下的转速为安。
(可逆攻丝夹头JSN12型自配)8、镗孔附件中配有莫氏号镗刀杆,装上刀头,即可进行镗孔,根据需要,也可自配专用镗杆,以适应各种镗孔加工需要;9、磨削机床配有碗型砂轮,选用不同磨料的砂轮,可使用各种钢件和铸铁件平面磨削;10、机床润滑滚动轴承均用润滑脂润滑,每半年清洗一次,相对移动的滑动表面采用机油润滑,每班2次。
11、机器的维护保养按《设备操作、维护、保养制度》执行。
并联机床返回并联机床(Parallel Machine Tool, PMT ), 也称为虚(拟)轴机床(Virtual Axis Machine Tool )或并联运动学机器(Parallel Kinematic Machine ), 是并联机器人技术和现代数控机床技术相结合的产物, 它同时兼顾了机床和机器人的诸多特性, 既可以看作是机器人化的机床(可以完成机床的切削任务), 又可以看作是机床化的机器人(可以完成许多精密的机器人作业)。
它能够提供机器人的灵活与柔性, 又具有机床的刚度和精度, 是集多种功能于一体的新型机电设备。
自并联机床问世以来, 不过数年时间, 便得以迅猛发展。
从1994 年美国Ingersoll 和G&L 两家公司首次在IMTS 上展出并联机床, 到1997 年欧洲国际机床展览会(EMO ' 97) 上, 就已有美、英、德等国展出的这类机床多达10 余台。