DL250 PID技术资料
PID使用说明
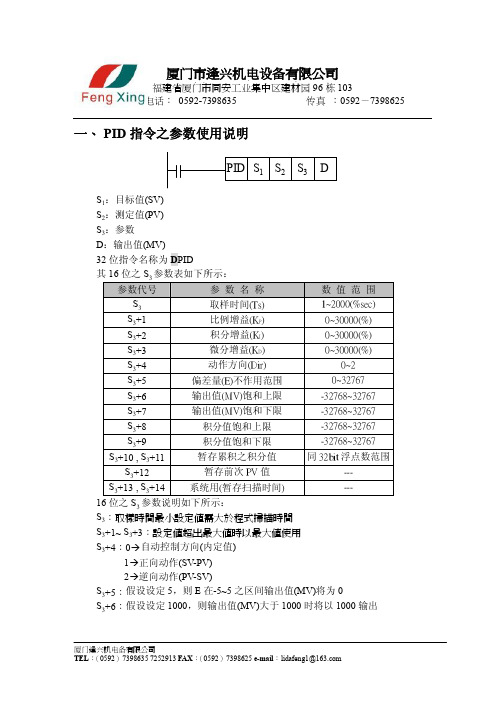
S3
D
16 位之 S3 参数说明如下所示: S3:取樣時間最小設定值需大於程式掃描時間 S3+1~ S3+3 :設定值超出最大值時以最大值使用 S3+4:0自动控制方向(内定值) 1 正向动作(SV-PV) 2 逆向动作(PV-SV) S3+5:假设设定 5 ,则 E 在-5~5 之区间输出值(MV)将为 0 S3+6:假设设定 1000 ,则输出值(MV)大于 1000 时将以 1000 输出
厦门市逢兴机电设备有限公司
福建省厦门市同安工业集中区建材园 96 栋 103 电话: 0592-7398635 传真 :0592-7398625
虛線內為PID指令
1/S SV
+ -
KI
+ + +
E
KPLeabharlann MVG(s) PVKD S
三、 运算公式
1 MV K P * E t K I * E t K D * PV t S S
厦门逢兴机电备有限公司 TEL: (0592)7398635 7252913 FAX: (0592)7398625 e-mail:lidafeng1@
厦门市逢兴机电设备有限公司
福建省厦门市同安工业集中区建材园 96 栋 103 电话: 0592-7398635 传真 :0592-7398625
加減速命令(SV)
PID
實際加減速度 (PV = S - P)
速度偵測 裝置(P)
范例三:使用 PID 指令于温度控制时之方块图(动作方向 S3+4 需设为 1)
溫度命令(SV) PID 加溫(MV) 加熱裝置
實際溫度(PV)
溫度偵測 裝置
PID图纸简介
保温代号
H P W S E
保温 防烫 热水伴热 蒸汽伴热 电伴热
管线代号
———
—————
主物料管道 辅助物料及公用工程管道
分界代号
二阀门和管件及其他
阀门和管件及其他
三设备代码
1设备的位号表示:
设备代码的表示
2设备代号 C 塔 E 换热器 R 反应器
P V M
PID图的内容
2 全部仪表(包括阀门,流量计,液位 计,温度计,压变等); 3 所有管道、安全阀、大小头及部分法 兰。 4 公用工程设施、取样点、吹扫接头; 5 工艺、仪表、安装等特殊要求。
PID图的读法
想要读懂一份PID图纸我们需要做一下几点 了解PID图纸上,每一个字母,符号所表示的 意义 。 一:管道符号及表示方法:
第2位 报警
控制 检测
显示
仪表符号
L P R S T Y
数字PID 文献综述
c数字PID控制摘要:文章首先介绍了PID 控制的原理,在这基础上,对数字PID控制算法进行了分析和研究,得出了位置式P ID和增量式P ID两种控制算法的优缺点,还讨论了对数字PID控制算法该如何改进,及其介绍了它在以8098单片机为主控制器的数字PID控制系统的应用实例。
关键词:PID;控制;原理;PID算法1 引言数字 PID控制系统是时间的离散系统,计算机对生产过程的控制是断续的过程。
即在每一个采样周期内,传感器将所测数据转换成统一的标准信号后输入给调节器,在调节器中与设定值进行比较得出偏差值,经 PID运算得出本次的控制量,输出到执行器后才完成了本次的调节任务。
在PID调节中,由于 PID算式选择的不同会得到不同的控制效果,特别是当算法中某些参数选择的不妥时,会引起控制系统的超调或振荡,这对某些生产过程是十分有害的。
为了避免这种有害现象的发生,分析和研究 PID算法,确定合理的 PID参数是必要的,同时对 PID控制技术的广泛应用具有重要的意义。
[1]2 PID控制原理PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
[2]比例(P)调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
积分(I)调节作用:是使系统消除稳态误差,提高无差度。
积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。
微分(D)调节作用:能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,从而加快系统的动作速度,减少调节时间。
[3]3 数字PID控制算法数字PID控制(Digital Proportional-Integral-Derivative controller)[4]是连续系统控制中广泛应用的一种控制方法。
数字PID控制算法通常分为增量式PID控制算法和位置式PID控制算法(positional PID control calculation)[5]。
D型多级离心水泵品牌型号及参数说明
■D型多级离心水泵■上海沈泉泵阀制造有限公司☆产品概述D型泵系单吸多级分段式离心泵,供输送清水及物理化学性质类似于水的液体之用。
本型泵扬程H23至153.6米,流量为12.6至39.6米3/时。
液体的最高温度不得超过80%,广泛应用于矿山排水,工厂及城市给水之用。
目前主要生产D型泵有:50D8 80D12 100D16 125D25☆型号意义☆产品结构1 轴承盖2 螺母3 轴承4 挡水套5 轴套架6 轴套甲7 填料压盖 8 填料环 9 进水段 10中间套 11密封环 12 叶轮13 中段 14 导叶挡板 15 导翼套 16拉紧螺栓 17出水段导翼 18 平衡套19 平衡 20 平衡环 21 出水段 22尾盖 23轴 24 轴套乙50D-8 80D-12100D-16 125D-2550D8流量Q功率N(千瓦)级数米3/时升/秒总扬程H (米)转数n (转/分)轴功率电动机功率效率η%气蚀余量h(米)叶轮直径(毫米)212.618 23.4 3.5 5 6.5 23 19 13 29501.43 1.5 1.482.255 65 56 2.3 105312.618 23.4 3.5 5 6.5 34.5 28.5 19.5 2950 2.145 2.25 2.22 3 55 62 56 2.3 105 412.618 23.4 3.5 5 6.5 46 38 26 2950 2.86 3 2.96 4 55 62 56 2.3 105 512.618 23.4 3.5 5 6.5 57.5 47.5 32.5 2950 3.575 3.75 3.7 5.5 55 62 56 2.3 105 612.618 23.4 3.5 5 6.5 66 57 39 2950 4.29 4.5 4.44 5.5 55 62 56 2.3 105 712.618 23.4 3.5 5 6.5 80.5 66.5 45.5 2950 5.005 5.25 5.18 7.5 55 62 56 2.3 105 812.818 23.4 3.5 5 6.5 92 76 52 2950 5.72 6 5.92 7.5 55 62 56 2.3 105 912.818 23.4 3.5 5 6.5 103.5 85.5 58.5 2950 6.435 6.75 6.66 7.5 55 62 56 2.3 105 1012.618 23.4 3.5 5 6.5 115 95 65 2950 7.15 7.5 7.4 11 55 62 56 2.3 105 1112.618 23.4 3.5 5 6.5 126.5 104.5 71.5 2950 7.865 8.25 8.14 11 55 62 56 2.3 105 1212.618 23.43.5 5 6.5138 114 782950 8.58 9 8.8811 55 62 562.3 10580D12流量Q功率N(千瓦)级数米3/时 升/秒总扬程 H (米) 转数 n (转/分)轴功率电动机功率 效率 η % 气蚀 余量 h(米)叶轮 直径 (毫米)225.232.4 39.6 7 9 11 25.6 22.7 17.6 2950 2.52 2.68 2.72 3 69.5 75 69.5 2.8110325.232.4 39.6 7 9 11 38.4 34.05 26.4 2950 3.78 4.02 4.08 5.5 69.5 75 69.5 2.8110425.232.4 39.6 7 9 11 51.2 45.4 35.2 2950 5.04 5.36 5.44 7.5 69.5 75 69.5 2.8110525.232.4 39.6 7 9 11 64 56.75 44 2950 6.3 6.7 6.8 7.5 69.5 75 69.5 2.8110625.232.4 39.6 7 9 11 76.8 68.1 52.8 2950 7.56 8.04 8.16 11 69.5 75 69.5 2.8110725.232.4 39.6 7 9 11 89.6 79.45 61.6 2950 8.82 9.38 9.52 11 69.5 75 69.5 2.8110825.232.4 39.6 7 9 11 102.4 90.8 70.4 2950 10.08 10.72 10.28 15 69.5 75 69.5 2.8110925.232.4 39.6 7 9 11 115.2 102.15 79.2 2950 11.34 11.06 12.24 15 69.5 75 69.5 2.81101025.232.4 39.6 7 9 11 128 113.5 88 2950 12.6 13.4 13.6 15 69.5 75 69.5 2.81101125.232.4 39.6 7 9 11 140.8 124.85 96.8 2950 13.86 14.74 14.96 18.5 69.5 75 69.5 2.81101225.232.4 39.67 9 11153.6 136.2 105.62950 15.12 16.08 16.3218.5 69.5 75 69.52.8110100D16流量Q功率N(千瓦)级数米3/时 升/秒 总扬程 H (米) 转数 n (转/分)轴功率电动机功率 效率 η % 气蚀 余量 h(米)叶轮 直径 (毫米)23654 72 1 0 1 5 20 38.8 35.2 28.4 2950 6.59 7.2 7.65 11 58 71.5 73 3.313133654 72 10 15 20 58.2 52.8 42.6 2950 9.85 10.8 11.45 15 58 71.5 73 3.313143654 72 10 15 20 77.6 70.4 56.8 2950 13.18 14.4 15.28 18.5 58 71.5 73 3.313153654 72 10 15 20 97 88 71 2950 16.47518 19.1 22 58 71.5 73 3.313163654 72 10 15 20 116.4 105.6 85.2 2950 19.77 21.6 22.9 30 58 71.5 73 3.313173654 72 10 15 20 135.8 123.2 99.4 2950 23.06525.2 26.7 30 58 71.5 73 3.313183654 72 10 15 20 155.2 140.8 113.6 2950 26.36 28.8 30.5 37 58 71.5 73 3.313193654 72 10 15 20 174.6 158.4 127.8 2950 29.65532.4 34.4 37 58 71.5 73 3.3131103654 72 10 15 20 194 176 142 2950 32.95 36 38.2 45 58 71.5 73 3.3131113654 72 10 15 20 213.6 198.6 156.2 295 0 36.24539.6 43.7 55 58 71.5 73 3.3131123654 7210 15 20232.8 211.2 170.4295 0 39.54 43.2 45.955 58 71.5 733.31 31125D25流量Q功率N(千瓦)级数米3/时升/秒总扬程 H(米)转数 n(转/分)轴功率电动机功率效率 n% 气蚀 余量h(米) 叶轮 直径(毫米)290108 126 25 30 35 46 40 32 2950 15.2 15.6 15.4 18.575 76 7l 3.6 4 5.3 152 390108 126 25 30 35 69 60 48 2950 22.8 23.4 23.1 30 75 76 71 3.6 4 5.3 152 490108 126 25 30 35 92 80 64 2950 30.4 31.2 30.8 37 75 76 71 3.6 4 5.3 152 590108 126 25 30 35 115 100 80 2950 38 39 38.5 45 75 76 71 3.6 4 5.3 152 690108 126 25 30 35 138 120 96 2950 45.6 46.8 46.2 55 75 76 71 3.6 4 5.3 152 790108 126 25 30 35 161 140 112 2950 53.2 54.6 53.9 75 75 76 71 3.6 4 5.3 152 890108 126 25 30 35 184 160 128 2950 60.8 62.4 61.6 75 75 76 71 3.6 4 5.3 152 990108 126 25 30 35 207 180 144 2950 68.4 70.3 69.3 90 75 76 71 3.6 4 5.3 152 1090108 12625 30 35230 200 1602950 76 78 7790 75 76 713.6 4 5.3152☆结构说明D型水泵为多级分段式,其吸人口位于进水段上,成水平方向,吐出口在出水段上垂直向上,其扬程可根据使用需要而增减水泵级数。
先进的PID控制
北京化工大学本科毕业论文题目:基于遗传算法整定的PID控制院系:专业:电气工程及其自动化班级:________ ____ _ _ _____ 学生姓名:____________ ________ _____ 执导老师:___________ ______________ ______论文提交日期:年月日论文答辩日期:年月日摘要PID控制器是在工业过程控制中常见的一种控制器,因此,PID参数整定与优化一直是自动控制领域研究的重要问题。
遗传算法是一种具有极高鲁棒性的全局优化方法,在自控领域得到广泛的应用。
针对传统PID 参数整定的困难性,本文提出了把遗传算法运用于PID参数整定中。
本文首先对PID控制的原理和PID参数整定的方法做了简要的介绍。
其次介绍了遗传算法的原理、特点和应用。
再次,本文结合实例阐述了基于遗传算法的PID参数优化方法,采用误差绝对值时间积分性能指标作为参数选择的最小目标函数,利用遗传算法的全局搜索能力,使得在无须先验知识的情况下实现对全局最优解的寻优,以降低PID参数整定的难度,达到总体上提高系统的控制精度和鲁棒性的目的。
最后,本文针对遗传算法收敛速度慢、易早熟等缺点,将传统的赌盘选择法与最优保存策略结合起来,并采用改进的自适应交叉算子和自适应变异算子对PID参数进行迭代寻优整定。
采用MATLAB对上述算法进行仿真验证,仿真结果表明了遗传算法对PID参数整定的有效性。
关键词:PID;参数控制;遗传算法;MATLABAbstractPID controller is a kind of controller that is usual in industrial process control. Therefore, tuning and optimization of PID parameters are important researchable problems in the automatic control field, where Genetic algorithm is widely used because of the highly robust global optimization ability of it. Aiming at the difficulty of traditional tuning of PID parameter, this paper puts forward a method that genetic algorithm is applied to the tuning of PID parameters.Firstly, the principle of PID control and the methods of tuning of PID parameters are introduced briefly. Secondly, this paper introduces the principle, characteristics and application of genetic algorithm. Thirdly, this article expounds on the methods of tuning of PID parameters based on genetic algorithm with an example. In this paper, the performance index of time integral of absolute error serves as the minimum objective function in the tuning of PID parameters, and the global search ability of genetic algorithm is used, so the global optimal solution is obtained without prior knowledge, and the difficulty of tuning of PID parameter is reduced, so the goal is achieved which is improving the control accuracy and robustness of the system overall. Finally, aiming at the weakness of genetic algorithm, such as the slow convergence of prematurity and precocious, the traditional gambling site selection method and elitist model are united in this paper, and the paper alsoadopted adaptive crossover operator and adaptive mutation operator to optimize PID parameters iteratively.Use MATLAB to simulate these algorithms, and the simulation results show that PID controller tuning based on genetic algorithm is effective.Keywords: Genetic algorithm; PID control; optimum; MATLAB目录第一章引言 (1)1.1 课题研究的背景及意义 (1)1.2 PID控制的发展与现状 (1)1.3 本文研究的内容 (2)第二章PID控制 (4)2.1 PID控制原理 (4)2.2 常规PID参数整定方法 (6)2.2.1 Ziegler-Nichols整定方法 (6)2.2.2 改进的Ziegler-Nichols整定方法 (8)2.2.3 ISTE最优设定方法的经验公式 (9)2.2.4 Haalman法的计算公式 (10)2.2.5 KT整定法 (11)第三章基于遗传算法整定的PID控制 (13)3.1 遗传算法基本原理 (13)3.1.1 遗传算法概要 (13)3.1.2 遗传算法的应用步骤 (14)3.2 遗传算法的实现 (15)3.2.1 编码方法 (15)3.2.2 适应度函数 (16)3.2.3 选择算子 (17)3.2.4 交叉算子 (17)3.2.5 变异算子 (18)3.2.6 遗传算法控制参数选取 (19)3.3 遗传算法的仿真验证 (20)3.2.6遗传算法中关键参数的确定 (23)3.3 遗传算法的主要步骤 (23)3.3.1 准备工作 (23)3.3.2 基本遗传算法的步骤 (24)3.4遗传算法PID参数整定的编程实现 (24)3.4.1初始群体 (24)3.4.2 编码 (25)3.4.3 基本操作算子 (26)3.4.4 目标函数 (29)3.4.5 画图 (29)第四章PID整定方法的仿真应用 (31)4.1 一阶对象 (31)4.2 二阶对象 (32)4.3 三阶对象 (34)第五章结论 (37)参考文献 (38)致谢 (40)第一章引言1.1 课题研究的背景及意义PID(p一proportion,I一Integral,D一Differentia)控制是比例、积分、微分控制的简称PID[l]。
石油工程技术 井下作业 250型修井机技术规范、操作及维护保养规程

250型修井机技术规范、操作及维护保养规程1技术规范1.1整机技术规格及性能参数外形尺寸10460×2580×2900mm修井深度2400m动力机型号CAT3306DIT柴油机动力机功率184kW(当2200r/min时)传动箱型号艾里森HT750DRDB1.2主要部件总成技术规格及性能参数液压绞车滚筒直径Ф245mm 长度347mm 容绳量90m 最大拉力3000kgf刹车冷却系统水箱容量0.227m³系统压力0.55~0.8MPa液路系统主液泵最大排量265L/min 系统最大压力11MPa 油箱容量757L气路系统系统最高压力0.9MPa自走车底盘型号HY5301CAT(汉阳HY5300TJCD)驱动型式6×6轴距5325+1350mm轮距前轮:2050mm;后轮1920mm底盘自重12000kg最高车速47km/h最大爬坡度满载干燥硬实路面:20%最小转弯半径13m最小离地间隙280mm(后悬平衡梁处)最大制动距离以30km/h初速时:12m 接近角30°离去角24°前轮定位主销内倾角5°主销外倾角2°前轮外倾角1°前束2~5mm轮辋型号8.00V轮胎12.00-20转向机构整体式动力转向器型号:XJ110z/Z转向器平均传动比:23.27转向油泵:最大工作压力130kg/cm2,排量:18.9ml/r制动系统贮气筒容量2×42L电气设备线路系统:单线制,负极搭铁线路电压:24V发动机型号CAT3306DIT柴油机型式直列六缸水冷四冲程增压柴油机最大功率184kW(2200r/min)最大扭矩900N.m(1500r/min)气缸直径121mm活塞行程152mm发动机工作容积10.5L变速箱型号艾里森HT750DRDB额定输入功率425马力额定输入扭矩180kgf.m最大输入转速2500r/min档位123456速比 5.18 3.18 2.02 1.391 4.12分动箱动力输出1:1液力变矩器变速比1:2.211.3修井机润滑表润滑点部位润滑点油品名称规格加注量检查周期换油周期夏季冬季CF-415W-40CF-410W-30滚筒轴承盒2×13#锂基脂3#锂基脂新油挤出每班每天滚筒刹车系统刹车轴轴承盒2×1新油挤出每天每月刹车平衡块2×13#锂基脂新油挤出每天每月角传动装置传动箱180W-90重负荷齿轮油油位250-280h 按质换油链条箱1CD 15W40油位250-280h 按质换油输出轴轴承13#锂基脂新油挤出每天每天转盘传动装置传动箱180W-90重负荷齿轮油油位250-280h 按质换油链条箱1CD 15W40油位250-280h 按质换油输入轴轴承13#锂基脂新油挤出每天每天转盘链条传动箱链条箱1CD 15W40油位250-280h 按质换油链轮轴轴承43#锂基脂新油挤出每天每天液压小绞车涡轮箱180W-90重负荷齿轮油油位250-280h 按质换油滚筒轴轴承13#锂基脂新油挤出每天每天链条盒1CD 15W40油位250-280h 按质换油链条护罩1CD 15W40油位250-280h 按质换油转盘齿轮箱180W-90重负荷齿轮油油位250-280h 按质换油防跳轴承13#锂基脂新油挤出每天每天游车大钩滑轮轴23#锂基脂新油挤出每天每天大钩13#锂基脂新油挤出每天每天大钩体1CD 15W40油位250-280h 按质换油水龙头53#锂基脂新油挤出每天每天升降油缸13#锂基脂新油挤出每周每月离合器导气龙头13#锂基脂新油挤出每天每天井架上体43#锂基脂新油挤出每井次每井次下体83#锂基脂新油挤出每井次每井次天车103#锂基脂新油挤出每井次每井次万向轴2×33#锂基脂新油挤出每井次每井次发动机1CF 15W40CF 10W3026.5L 每班按质换油变矩器18#液力传动油36L 每班按质换油液压系统1L-HV32#抗磨液压油757L250-280h一年2操作规程2.1行车部分2.1.1发动机起动前检查2.1.1.1检查燃油箱燃油是否足够。
光洋电子(无锡)有限公司 DL250 PID 技术资料说明书
Value & TechnologyDL250 PID技术资料目录第一节DL250 PID回路的特点 (1)一、主要特点 (1)二、PID回路基础 (3)第二节回路参数设定 (5)一、回路控制表和回路数 (5)二、PID错误标志 (5)三、回路控制表的空间大小和存储单元 (6)四、控制回路参数表字定义 (7)五、PID方式设定1 的位说明(Addr+00) (8)六、PID方式设定2 的位说明(Addr+01) (9)七、方式/报警监控字(Addr+06) (10)八、上升/保持表标志(Addr+33) (10)九、上升/保持表地址(Addr+34) (11)十、上升/保持表编程错误标志(Addr+35) (11)第三节回路采样周期和程序流程 (12)一、回路采样周期Addr+07 (12)二、选择最佳的采样周期 (12)三、确定合适的采样周期(Addr+07): (13)四、采样周期编程 (13)五、PID回路影响CPU扫描时间 (14)第四节过程控制成功的十个步骤 (16)第五节回路操作基础 (18)一、数据存储单元 (18)二、数据源 (18)三、直接存取模拟量I/O值 (19)四、回路控制方式 (20)五、CPU方式和回路控制方式 (21)六、如何改变回路控制方式 (22)七、PID方式的操作面板控制 (23)八、PLC方式对回路方式的影响 (23)九、回路控制方式的替代 (23)十、无扰动切换 (24)第六节PID回路数据组态 (25)一、回路参数数据类型 (25)二、选择单极或双极类型 (25)三、数据偏置量的处理 (26)四、设定值(SP)的限制范围 (26)五、设定值(SP)间接地址 (27)六、过程变量(PV)的组态 (27)七、控制输出组态 (28)八、偏差项的组态 (29)第七节PID算法 (30)一、位置算法 (30)二、速度算法 (31)三、比例、积分、微分项 (33)四、使用PID控制运算子模块 (34)五、微分增益的限幅 (35)六、偏移项 (35)七、积分分离 (36)第八节回路调整过程 (37)一、开环测试 (37)二、手动调整过程 (37)三、自整定过程 (39)四、串级调整回路 (42)第九节PV模拟量滤波 (43)一、DL250内置模拟量滤波器 (43)二、在梯形逻辑程序中建立一个模拟量软件滤波 (44)第九节前馈控制 (45)第十节时间—比例控制 (47)第十一节串级控制 (49)一、简介 (49)二、DL250 CPU中的串级回路 (50)第十二节过程报警 (51)一、PV绝对值报警 (52)二、PV偏离报警 (52)三、PV变化率报警 (53)四、PV延迟报警 (54)五、报警出错 (54)第十三节上升/保持发生器 (55)一、简介 (55)二、上升/保持表 (56)三、上升/保持表的标志 (58)四、上升/保持发生器有效 (58)五、上升/保持控制 (58)六、上升/保持控制过程的监控 (59)七、上升/保持编程错误 (59)八、测试上升/保持控制过程 (59)第十四节故障检修提示 (60)附录1文献目录 (61)附录2PID回路术语汇总 (62)第一节DL250 PID回路的特点一、主要特点DL250过程控制回路具有面向多种应用需求的优越的特点。
DL立式多级泵样本

The bearings are lubricated by Ca-base grease. The rotating direction of the pump is counterclockwise, when viewed from the motor to bottom.
(1) Check the pump and motor before installation. Pre-test the tightness of the bottom valve (if any).
(2) The suction and the discharge pipelines must be supported to reduce the vibration and the force that pipe acting on the pump.
二、结构说明:
DL 泵为立式多级分段式结构,用四只螺栓把进水段、中段、出水段联系成一体。吸入 口位于泵下端的进水段上,出水口位于泵的出水段上。根据安装使用要求不同,出水段相 对进水段的位置可安装在 0°、90°、180°、270°等四个方位。如果用户不提要求,一般 安装在 180°方向。
DL 泵的主要零件有:进水段、中段、出水段、叶轮、导叶、轴、平衡鼓、平衡套、密 封环等。泵轴向力由平衡鼓平衡,其余残余轴向力由上端的向心推力球轴承承受。泵密封 根据用户要求可用填料密封或机械密封。
四、使用说明
(1)起动 a. 往轴承盒内加入润滑脂(钙基黄油)。检查电机转向是否正确。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、数据存储单元 .................................................................................................................. 18
第三节
回路采样周期和程序流程 ....................................................................... 12
一、回路采样周期 Addr+07 ............................................................................................... 12
五、PID 方式设定 1 的位说明(Addr+00) ................................................................... 8
六、PID 方式设定 2 的位说明(Addr+01) ................................................................... 9
一、回路控制表和回路数 ...................................................................................................... 5
二、PID 错误标志..................................................................................................................... 5
三、回路控制表的空间大小和存储单元 ........................................................................................................................................................................ 7
Value & Technology
DL250 PID 技术资料
光洋电子(无锡)有限公司
目录
第一节
DL250 PID 回路的特点 ............................................................................. 1
一、主要特点 ............................................................................................................................. 1
二、PID 回路基础..................................................................................................................... 3
第二节
回路参数设定 ............................................................................................. 5
二、选择最佳的采样周期 .................................................................................................... 12
三、确定合适的采样周期(Addr+07):.......................................................................... 13
七、方式/报警监控字(Addr+06)................................................................................... 10
八、上升/保持表标志(Addr+33)................................................................................... 10
九、上升/保持表地址(Addr+34)................................................................................... 11
十、上升/保持 表编程错误标志(Addr+35) .............................................................. 11
第四节
过程控制成功的十个步骤 ....................................................................... 16
第五节
回路操作基础 ........................................................................................... 18
四、采样周期编程 .................................................................................................................. 13
五、PID 回路影响 CPU 扫描时间 ..................................................................................... 14