第四章 船舶稳性
稳性计算

船舶初稳性高度计算稳性(stability)是指船舶在外力矩(如风、浪等)的作用下发生倾斜,当外力矩消除后能自行恢复到原来平衡位置的能力。
船舶稳性,按倾斜方向可分为横稳性和纵稳性;按倾斜角度大小可分为初稳性(倾角100以下)和大倾角稳性;按外力矩性质可分为静稳性和动稳性。
对于船舶来说,发生首尾方向倾覆的可能性极小,所以一般都着重讨论横稳性。
船舶是否具有稳性以及稳性好坏,决定于G点与M点的相对位置和G和M间距离的大小,即GM值是衡量船舶稳性好坏的标准,称GM值为初稳性高度。
它与稳性的关系是:当M点在G点之上时,GM>0,船舶具有稳性,GM值越大,稳性越好,但船舶摇摆就会加剧;当M点在G点之下时,GM<0,船舶不具有稳性,一旦受到外力矩作用很容易使船倾覆;当M点和G点重合一点时,GM=0,船舶也不具有稳性,因为一旦受到外力矩作用,船舶处于随遇平衡状态,对船舶也极不安全。
1.船舶装载后的初稳性高度GM:GM=KM--KG{KM--为船舶横稳心距基线高度(米)KG--为船舶装载后重心距基线高(米)KM--可由船舶资料静水曲线图按平均吃水查得}2.舶装载后重心距基线高KG:KG=( DZ g+∑P i Z i)/Δ { D--空船重量(吨);查船舶资料得;Zg--空船重心距基线高度(米);查船舶资料得;Pi--包括船舶常数,货物总重量,船员及供应品,备品,油水重量(吨);Z i--载荷Pi的重心高度(米);∆--船舶排水量(吨);}3.自由液面的影响δGM f :δGM f=∑ρi x/Δ {ρ—舱内液体的密度(克/立方米)ix---液舱内自由液面对液面中心轴的面积横矩(M4)}4.经自由液面修正后的初稳心高度G o M:G o M=KM--KG--δGM f5.船舶横摇周期Tө:Tө=0.58f√(B+4KG)/G o M {0.58为常数;f—可由B/d查出;B—船舶型宽;d—船舶装载吃水;}常识:20尺柜:20’0” x8’ 0” x8’ 6”,6.058x2.438x2.591米,内容积为5.69x2.34x2.18米,,体积为24-26立方米。
船舶原理13章课件
稳性 抗沉性 快速性(船舶阻力、推进器推力) 摇荡性 操纵性(航向稳定性、回转性)
§1-3 船舶分类
§1-1船舶发展概况
船舶——已有3000多年发展史。经历了以下几个不同的阶段
⑴造船材料方面:①木船时代;②铁船时代;③钢船时代。
高速集装箱船。
第二章 船舶尺度及布置
§2-1 船舶外形的一般特征
船体外形,特别是它的水下部分,对其航海性能有 很大影响。
船体形状指船体的外形、大小、肥瘦和表面的光顺 程度。
船体的几何形状是一个瘦长呈多向变化的复杂几何 曲面。
船舶整体左右对称于船体中心线,船中前部分和中
后部分不对称于船长中点。
山的形状
§2-2 船舶型线图
观看:一 座山的 描述方 法。
船舶的坐标系统
§2-3 船舶型线图
1、三个基准面
中 线 面 XOZ 平 面 — — 它 将 船 体 分 为左右舷两个对称部分的纵向 垂直平面,是量度船体横向尺 度的基准面。
基 平 面 XOY 平 面 — — 过 龙 骨 线 与 中站面的交点O,并平行于设计 水线面的平面, 是量度船体垂直 方向尺度的基准面。
首垂线——通过首柱的前缘和时间水线的交点所作的垂线。
尾垂线——沿着首柱的后缘或舵杆中心线所作的垂线。 平行中体——在船中前后这段横剖面形状和中横剖面相同的
船体。中横剖面之前的船体称为前体,之后称为后体。
龙骨线——中线面与船体型表面底部的交线。
船首形状——指在中纵剖面上船首轮廓线的形状。 ⑴直立型——甲板易上浪,外形不美观,现今很少见到。 ⑵前倾型——适航性好,外形美观,制造简单,较多采用。 ⑶飞剪型——船首外飘,首部甲板面积大,适航性好,外
船舶原理 必背

船舶货运符号1、船舶形状2、船型系数3、常用位置点3.其它4.稳性参数基本公式:第二章:近似算法梯形法 )2(00nni i y y y l A +-=∑= 辛一法 )4(31321y y y l A ++=辛二法 )33(834321y y y y l A +++=第三章:浮性1.重量、重心计算:i P D D ∑+=1 11)(1D M D X P X D X xp i g g i =⋅∑+⋅= 1)(1D Y P Y D Y i p i g g ⋅∑+⋅=11)(1D M D Z P Z D Z Zp i g g i =⋅∑+⋅=注意:利用合力矩定理,∑==n1i (力矩)分力对该轴或支点取的的力矩合力对某一支点或轴取其中:11g g 1g 1Z ,Y ,X ,∆为装卸后重量、重心。
g g g Z ,Y ,X ,∆为装卸前重量、重心,Pi Pi i P iZ ,Y ,X ,P ,为装卸货物重量、重心,装货为+,卸货为—x M :全船重量纵向力矩; Z M :全船重量的垂向力矩;2.少量装卸对吃水影响TPC100Pd P =δ W A TPC ρ01.0=其中:TPC -当前水域密度下的每厘米吃水吨数。
P -装卸货物重量,装货为+,卸货为—3.舷外水密度变化对船舶吃水的影响⎰=b aydxA⎪⎪⎭⎫ ⎝⎛-⨯=1100211ρρδρTPC Dd 其中: 1ρ-先前的水域密度;2ρ-后来的水域密度第四章 稳性1.初稳性高度定义式:g M Z Z GM -= M Z 根据型吃水查静水力资料,g Z 利用公式计算 2.船内垂移货物(初始正浮): Dpl GM M G z-=1 3.船内横移货物(初始正浮):GMD P tg y ⋅=θ4.自由液面的影响 Di GM M G xii ∑-=ρ1其中:自由液面修正量为 DiGMix i f∑=ρδx i -水线面的自由液面惯矩,对于矩形液面 3x lb 121i =对于等腰梯形液面)b b )(b b (481i 222121x ++=注意:GM 是指船舶装载与液体同重的固体时的初稳性高度,即没有考虑液体的流动性。
4航向稳定性
三、船舶保向性及其影响因素
2、影响保向性的因素 1)船型 ❖ 方型系Cb较小,长宽比L/B较高的瘦削型船舶,回
转时阻矩较大,航向稳定性较好,保向性较好; 肥胖型船则较差。 2)水线下船体侧面积形状 ❖ 水线下侧面积在船尾分布较多的船舶,如船首较 为削进、船尾有较大钝材的船舶,其航向稳定性 较好,保向性也较好;而装有球鼻首的船将使其 航向稳定性降低。
的情况下,能尽快地稳定于新航向的性能。也即船舶直线稳 定性。稳定于新航向较慢、惯性转头角较大的船,其动航向 稳定性较差;稳定得较快、惯性转头角较小的船,其动航向 稳定性较好;一直转头不停而偏转下去的船,则不具备动航 向稳定性。一般所说的船舶航向稳定性指的就是动航向稳定 性,也叫航稳性。大多数船舶都具有动航向稳定性。当然, 航向稳定性差甚至航向不稳定的船舶,为了保持航向,就需 频繁操舵,且所用舵角也偏大。
当然,也可能在干扰消除后,船舶最终将进入一个旋回运动,这类船 舶则不具备航向稳定性
一、航向稳定性的概念
1、静航向稳定性(statical course stability) ❖ 静航向稳定性指的是船舶受外力作用稍微偏离原航向,而
重心仍沿原航线运动时,船舶斜航漂角将如何变化的性能。 也就是说,外力干扰消失后,若船舶不仅最终航向与初始 航向相同,而且位置也在原航向延伸线上,则称船舶具有 静航向稳定性(位置稳定性)。
二、船舶航向稳定性的判别
❖ 总结: ❖ T>0,船舶具有航向稳定性。T值为越小的正
数,船舶航向稳定性越好。T<0,船舶不具 有航向稳定性。 ❖ 追随性好的船舶可以同时判断为航向稳定性 好的船舶
三、船舶保向性及其影响因素
❖ 1、船舶保向性course keeping
❖ 船舶保向性与航向稳定性并不是同一概念。航向稳定性是具 有一定初始转头角速度的船舶,仅在船体因转头而受到的旋 回阻矩作用下逐渐稳定于新航向的能力。是船舶本身固有的 性能。保向性则是指船舶在风、浪、流等外力作用下,由操 舵水手(或自动舵)通过罗经识别船舶首摇情况,并通过操 舵抑制或纠正首摇使船舶驶于预定航向的能力。船舶保向性 的好坏不仅与航向稳定性的好坏有关,同时取决于操舵人员 的技能及熟练程度、自动舵的控制能力、舵机的响应能力以 及舵的控向能力。显然,航向稳定性越好的船舶,保向性也 越好
保证船舶稳性的措施
保证船舶稳性的措施船舶稳性是指船舶在航行、靠泊和装卸货物等情况下不发生危险倾覆的能力。
良好的船舶稳性措施能够确保船舶运输更加安全可靠。
下面我们将介绍一些保证船舶稳性的措施。
1. 货物摆放与配载船舶的货物摆放和配载是影响船舶稳性的重要因素。
为了保证船舶良好的稳定性,货物应该按照规定的配载图纸和指示进行合理摆放和配载。
在船舶装运过程中,货物的压载线高度和货物集中度也是必须要考虑的因素。
此外,也要根据海况进行调节。
2. 船舶水线的控制船舶的水线必须在控制范围之内,才能够保证船舶的稳定性。
通常而言,根据船舶的状况和要求,水线的控制有以下几个措施:•加载计算,确定船舶的准载吃水和准载排水量•每船舶厂家确定的吃水测量标点•水下测量的水位标志高度采用这些措施可以有效控制船舶的水位,在规定的范围内保持船舶稳定性。
3. 液体负载均衡措施船舶在携带液体物品运输时,需采取一定的液体负载均衡措施。
刘续晨和沈海生的研究表明,优秀的液体负载均衡方法应该满足以下三个原则:•随时避免危险油位•避免液体货物操作时的不良后果•通化油轮吨位和运输能力,或装船型号宽限范围内的货物种类以上提到的几点原则可以保证船舶在液体负载均衡时能够保持稳定。
4. 打捞设备和替代动力设备配置船舶在遇到不时之需的时候,需要及时配置打捞设备和替代动力设备来帮助船舶克服风浪、船体遭受损坏等问题。
在配置时,应该按照船舶的类型、航行区域和日常工作等因素进行选择,从而确保设备的有效应用。
5. 安装冷水元素船舶船体内装冷水元素也是一种能够保证船舶稳定性的措施之一。
冷水元素质量要求高且安装需要专业技术。
在使用时,船员要按照相关的操作规定进行水位的流加,以确保其稳定性。
总之,船舶稳定性措施的科学运用始终是船员们保证船舶普遍运输安全的关键。
船舶需要在满足各种规范、技术和安全要求的条件下才能达到稳定性,从而保证人们在出海旅游和海洋运输方面的舒适和安全。
船舶静力学初稳性
20
▪ 二、重量的横向移动
Hale Waihona Puke 2020/5/23轮机工程学院
21
2020/5/23
轮机工程学院
22
▪ 三、重量的纵向移动
2020/5/23
轮机工程学院
23
2020/5/23
轮机工程学院
24
▪ 四、重量沿任意方向的移动
2020/5/23
轮机工程学院
25
2020/5/23
轮机工程学院
26
2020/5/23
8
▪ 三、稳心及稳心半径
▪ M点称为横稳心 (或初稳心)。
▪ BM称为横稳心 半径(或初稳心 半径)。
2020/5/23
轮机工程学院
9
▪ 纵稳心半径
2020/5/23
轮机工程学院
10
§3-3 初稳心公式和稳心高
▪ 一、初稳心公式
2020/5/23
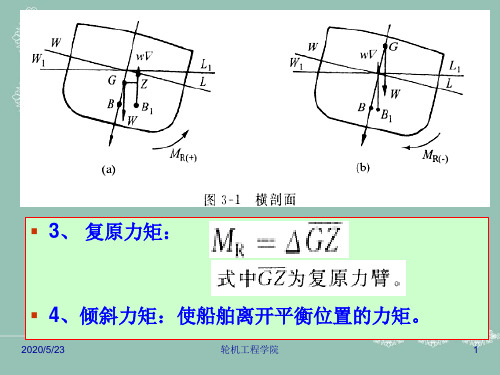
▪ GZ复原力臂。
▪ GM横稳心高,也称 初稳心高。
▪ 3、船型系数曲线4条。
2020/5/23
轮机工程学院
17
2020/5/23
轮机工程学院
18
§3-5 重量移动对船舶浮态和初 稳心的影响
▪ 一、重量的垂直移动
2020/5/23
轮机工程学院
19
结论:提高船舶的重心对稳性不 利;降低船舶的重心是提高船舶 稳性的有效措施之一。
2020/5/23
轮机工程学院
2020/5/23
轮机工程学院
2
§3-2 浮心的移动和稳心及稳心半径
▪ 一、 等体积倾斜水线
2020/5/23
轮机工程学院
3
▪ 1、入水楔形的体积
稳性定义

稳性定义又称“复原性”。
船舶在外力作用消除后恢复其原平衡位置的性能。
概述稳性船舶受外力作用偏离其正浮平衡位置,当外力消失后能自行恢复到原平衡位置的能力,称之为稳性。
具有这种能力的船是稳定的,否则是不稳定的或随遇平衡的(即能停留在任何倾斜角状态)。
按倾角大小可分为初稳性(即小倾角稳性)和大倾角稳性。
按倾角的方向可分为横稳性和纵稳性。
船的横倾最为常见,故单讲稳性时即指横稳性。
按船舶破损浸水与否,又可分为破损稳性和完整稳性。
初稳性又称小倾角稳性。
船舶在外力作用下作小角度倾斜时的稳性。
如无特别注明,初稳性则指横向初稳性。
小角度倾斜一般是指横倾角不大于10°——15°,或横倾角不大于上甲板边缘浸入水中及舭部不露出水面的角度的状态。
其重要特征参数是初稳性高。
除考虑船舶在正常漂浮状态下的稳性外,在下水、进坞、搁浅、受凤浪袭击、甲板上浪、船上部结冰,以及受武器攻击、触礁和碰撞破舱等情况下也需分析其稳性。
船舶稳性是保证安全的一项重要性能,各国都制定有船舶稳性规范。
近代船舶稳性的研究已关注到船舶在风浪中运动时的稳性。
通过计算或用船模进行各种稳性试验可预报船舶稳性。
图中,a的状态是稳定的,b的状态是不稳定的。
国内航行船舶稳性特殊要求所有商船在各种装载状态下都应满足上述关于稳性的基本要求。
但考虑到船舶在使用过程中,实际可能的装载状态是千差万别、千变万化的,为了简化计算工作,法规对各种类型的船规定了应校核的标准装载情况,只要这些标准载况下船舶的稳性满足规范的要求,则可认为船舶稳性符合要求。
法规同时指出,船舶如有某种装载情况,比规定计算的标准载况差时,则应加算这种情况的稳性。
在计算各种载况的稳性时,除另有规定外,对燃料及备品的计算重量,一般是这样规定的:出港取为100%,航行中途为50% ,到港为10%。
法规对各类船舶规定核算的载况简述如下:1.干货船应核算以下四种基本装载情况的稳性:满载出港、满载到港、压载出港、压载到港。
船舶完整稳性
第2章完整稳性衡准第1节一般规定2.1.1当船上设置除毗龙骨以外的防摇装置时,应确保该装置工作时上述衡准仍能保持,且供电系统的失效或装置的故障不会导致船舶无法满足本篇的有关要求。
2.1.2应在必要的范围内考虑一些不利于稳性的影响因素,诸如顶部和舷部结冰、甲板上浪O2.1.3考虑到类似由于吸水和结冰引起的重量增加,及由于燃料和备品的消耗引起的重量减少等因素,应为航程的各阶段的稳性安全界限做出规定。
2.1.4每船均应备有1份由验船部门批准的稳性手册,该手册应含有足够的资料以使船长能够按本篇规定的使用要求操纵船舶。
2.1.5如果最小营运初重稳距(GM)曲线(或表)或者最大重心坐标(KG)曲线(或表)用于表示符合完整稳性衡准,这些限制曲线应包含整个营运纵倾范围,但验船部门认为纵倾影响不大时除外。
当上述曲线或表格无法囊括营运纵倾,船长应当核实作业情况没有偏离经设计的装载工况,或通过计算证实考虑到纵倾影响后该装载工况满足稳性衡准。
应为气象衡准数,这是稳性衡准数之一!图 2.2.2.12.2.2.2动稳性曲线因进水角为影响而中断时,除了用经过动稳性曲线中断处的割线代替上 述切线外,其余均同上述2.221所述(如图2.222)。
图 2.2222.2.3风压倾侧力臂。
按下式计算:Z P∖Zl v = -------- m v9810Δ式中:p —单位计算风压,p a ;按225要求计算;4——船舶装载水线以上受风面积,(包括甲板上装载物),m 2,按226要求计算;Z ——计算风力作用力臂,m ;按224计算;」——所核算装载情况下船舶排水量,32.2.4 计算风力作用力臂Z 为在所核算装载情况下船舶正浮时受风面积中心至水线的垂向距离。
受风面积中心应用通常确定图形形心的方法求得。
2.2.5 单位计算风压P 应按计算风力作用力臂Z 及不同航区由表2.2.5线性插值查得:单位计算风压P (Pa)表2.2.5本来2000规则已经回归成了光顺曲线的数据,应作为一个鱼腥味的亮点,现在又抄回去了,真佩服这复旧的能力!其航区之间有L83和2.00倍的关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二节 船舶稳性的计算
(2)影响初稳性高度的因素及计算
①GMf计算:
GM f
ix
式中:——液体密度(g/cm3);
ix——自由液面对其横倾轴的面积惯性距(m4)
ix值可查取“液舱自由液面惯性矩ix表”或用下式近似计算:
ix klb1 b2 (b12 b22 )
其中:l — 舱长(m); b1、b2 — 前、后边宽(m)。
2020/4/8
第一节 稳性的基本概念
3.按外力性质 静稳性:在静态力矩作用下,不计及倾斜角加速度 和惯性矩的稳性。 动稳性;在动态力矩作用下,计及倾斜角加速度和 惯性矩的稳性。
2020/4/8
第一节 稳性的基本概念
4.按船舱是否进水分 完整稳性:船体在完整状态时的稳性。 破舱稳性;船体破舱进水后所具有的稳性。
思考:在动态外力矩的作用下,什么时候船舶第一次达 到横倾角速度为零?
2020/4/8
第二节 船舶稳性的计算
1.动稳性与静稳性的区别
静稳性
动稳性
受力性质 静态外力作用
动态外力作用
基本标志 平衡条件
复原力矩MR(力臂GZ) MR = GZ 当MR = Mh时,船舶平衡于静倾角s
MR所作功AR(力臂ld) Md=AR = ld 当AR = Ah时,船舶平衡于动倾角d
第二节 船舶稳性的计算
(3)初稳心点法
GZ MS GM sin (m)
式中: MS —— 形状稳性力臂(m),MS= f(,) 。 GMsin —— 重量稳性力臂
初稳性点M随船舶吃水(或排水量)而改变,故其参考 点不像基点K、假定重心GA那样固定不变
2020/4/8
第二节 船舶稳性的计算
GM Pi (KG ZPi )
Pi
注:重心之下加载,GM变大;重心之上加载,GM变小
2020/4/8
第二节 船舶稳性的计算
⑤大量载荷(Pi﹥10%)变动
这时不能忽略载荷变动对KM的影响
①根据新的排水量Δ1=Δ + Pi查静水力资料,得到重量增 减后新的KM1
②计算重量增减后新的船舶重心高度KG1
(6)初始横倾
静稳性曲线下降,GZmax和稳性范围减小
2020/4/8
第二节 船舶稳性的计算
三、动稳性
动稳性:船舶在动态外力矩的作用下计及横倾角加速度和 惯性矩的稳性
外力矩逐渐作用在船上:不考虑横倾过程中的角加速度和 惯性矩(静稳性)
外力矩突然作用在船上:要考虑横倾过程中的角加速度和 惯性矩,如阵风突然袭击、海浪的猛烈冲击、拖轮急拖 或急顶等(动稳性)
静平衡角(静倾角)θs:船舶在静平衡位置的横倾角。
2020/4/8
第二节 船舶稳性的计算
5.2影响静稳性曲线的因素 对不同船舶:
(1)不同船宽(吃水、重心高度相同):
B ,KN ,GZmax ,i ,s.max ,v (2)不同干舷(船宽、吃水、重心高度相同):
F ,GM ,GZmax ,i ,s.max ,v
k — 系数,液面对称的舱柜取1/48,液面不对称的 舱柜取1/36
2020/4/8
减少自由液面影响的措施:
1)减少液舱柜的宽度 矩形液面的液舱内,设置一道纵向舱壁将其宽度二等分,ix 减少至原来的1/4;设置两道纵向舱壁将其宽度三等分, ix减 少至原来的1/9。对于等腰梯形或等腰三角型液面,设置设 置一道纵向舱壁将其宽度二等分,ix减少至原来的1/3。 设置横向舱壁则不会减少自由液面对稳性的影响
2020/4/8
第二节 船舶稳性的计算
(4)稳性消失点
横倾角达到某一角度时,MR或GZ等于零,此时稳性消失
稳性消失角θ v:船舶稳性消失时的横倾角。 稳性范围:0~ θ v ,超过θ v船舶会倾覆
2020/4/8
第二节 船舶稳性的计算
(5)静平衡位置和静平衡角
静平衡位置:静外力矩Mh缓慢作用于船上使船横倾,当倾 角达到某一角度时船舶不再继续倾斜的位置。此时: Mh=MR(大小相等,方向相反)
2020/4/8
第一节 稳性的基本概念
重量移动原理 合重心的移动方向平行于局部重心的移动方向,即: G1G2 || g1g1’,而且,PG1G2 = P1 g1g1’ 。
2020/4/8
第二节 船舶稳性的计算
一、初稳性 1.初稳性公式: MR = GZ 初稳性假定条件: (1)船舶微倾前后水线面的交线过原水线面的
4.自由液面对GZ的修正
1)重心高度修正法
将自由液面对初稳性高度的减少视为船舶重心高度的增大
GZ = KN – KG1sin
KG1
KG
ix
GZ1
KN
(KG
ix
) sin
➢ 这是一个近似的方法,在大倾角的情况下ix随横倾角而变化
2020/4/8
第二节 船舶稳性的计算
2)查取“液舱自由液面倾侧力矩表”
2020/4/8
第二节 船舶稳性的计算
对于同一船舶:
➢ (3)重心高度不同:
KG ,GZmax ,s.max ,v ,i
➢ (4)排水量(吃水)不同:与“干舷不同”类似
,GZmax ,i ,s.max ,v
2020/4/8
第二节 船舶稳性的计算
(5)自由液面
对稳性的影响,自由液面的存在 相当于增加了船舶的重心高度
2020/4/8
“稳性横交曲线”(基点法)
第二节 船舶稳性的计算
(2)假定重心点法 GZ=GAZA-GGAsinθ
式中: GAZA—— 形状稳性力臂(m), GAZA=f(,)
GGAsinθ —— 重量稳性力臂(m)。
GZ GAZA (KG KGA ) sin (m)
2020/4/8
2020/4/8
KG1 ③新的GM1=KM1-KG1
•
KG
Pi Pi
Z
i
上述方法对载荷少量增减同样适用,只是为了计算方便而用④中的简便算法
2020/4/8
第二节 船舶稳性的计算
二、大倾角稳性: 1.大倾角稳性与初稳性的区别
① 两者对应的船舶倾斜角不同 ②大倾角横倾时相邻的浮力作用线的交点不再为定点M
(小倾角横倾时忽略) ③大倾角横倾时,倾斜轴不再过初始水线面漂心
3.静稳性力臂GZ的计算 (1)基点法
GZ=KN - KH
式中:KN —— 形状稳性力臂(m),KN = f(,),
可从“稳性横交曲线”中查取;
KH —— 重量稳性力臂(m),KH = KGsin,
GZ —— 复原力臂(m)
GZ = KN - KH = KN - KGsin
2020/4/8
第二节 船舶稳性的计算
2)液舱柜应尽可能装满或空舱 3)保持甲板排水孔畅通,减小甲板上浪而形成的自由液面的影响 4)注意纵向水密分隔是否有漏水连通现象及是否有不必要的积水 5)在排水量较小时,更应重视自由液面对稳性的影响
2020/4/8
第二节 船舶稳性的计算
②船内载荷垂向移动对初稳性高度的影响
设GM的调整值:δGM= 要求的GM2 - 调整前GM1
2020/4/8
第一节 稳性的基本概念
四、稳性的分类 1.按倾斜方向
横稳性:船舶在横倾状态下所具有的稳性。 纵稳性:船舶在纵倾状态下所具有的稳性。
2020/4/8
第一节 稳性的基本概念
2.按倾斜角度大小 初稳性(小倾角稳性):倾斜角度小于10 时船舶 所具有的稳性。 大倾角稳性:倾斜角度大于10船舶所具有的稳性。
2020/4/8
第二节 船舶稳性的计算
(2)静稳性曲线上的反曲点
反曲点处曲线斜率最大,这是因为船舶横倾至甲板浸水 角前后浮心位置改变最大
反曲点:反曲点对应的角度即为甲板浸水角θim
(3)静稳性曲线上的极值点 是曲线最高点的位置,反映出船舶横倾中所具有的最大 静稳性力矩(力臂)MRm(GZmax)
极限静倾角θsmax:指极值点对应的横倾角
GM l P
因GM值等于将载荷P垂向移至悬挂 点所产生对GM影响,所以称悬挂点为 悬挂载荷的虚重心。 GM与悬挂索的 长度无关
2020/4/8
第二节 船舶稳性的计算
④少量载荷(Pi10%)变动
若设Pi变动前后KM = 0,则:
GM 2
GM1
Pi
KG1
Pi
Z Pi
式中:GM1、GM2 —— 载荷变动前、后船舶的初稳性高度(m)。
2020/4/8
(iii) Zi确定方法:舱内货物合重心法
以舱内所装货物的合体积中心作为该舱货物的合重心 (如果货舱已满仓,则取舱容中心作为货物的合重心)—— 合体积中心计算方法同上述方法(i)
配货的一般原则是重货在下、轻货在上,因此将货物合 体积重心作为该舱货物的合重心是一种偏安全的做法。
2020/4/8
油水载荷Zi确定方法:
(i)满舱时取舱容中心 (ii)未满舱时取载荷重心
货物载荷Zi确定方法:
(i)估算法
(ii)舱容曲线图法
(iii)舱内货物合重心法
2020/4/8
第二节 船舶稳性的计算
(i) Zi确定方法:估算法
2020/4/8
第二节 船舶稳性的计算
(ii) Zi确定方法:舱容曲线图
2020/4/8
第二节 船舶稳性的计算
2.衡(M量in船im舶um动c稳ap性siz的ing重m要om指en标t)—,—即最能小使倾船覆舶力倾矩覆M的h.m最in
小外力矩。在此最小倾覆力矩的作用下所对应的动倾角称 为极限动倾角θdm
2020/4/8
第一节 稳性的基本概念
二、几个基本概念 2. (横)稳心(Metacenter)M: 船舶微倾前后浮力作用线的交点。其距基线的