一种手语识别装置设计
基于智能眼镜的手语识别系统设计

基于智能眼镜的手语识别系统设计一、引言手语是聋哑人士及部分听障人士主要的沟通方式之一。
然而,由于手语在非聋哑人士中的广泛应用,以及不同地区和国家的手语差异,理解和使用手语成为非聋哑人士的挑战。
为了解决这一问题,本文提出了一种基于智能眼镜的手语识别系统,旨在通过智能眼镜的实时监测和分析,准确识别手语表达并转化为文字或声音的形式,从而增进沟通和理解。
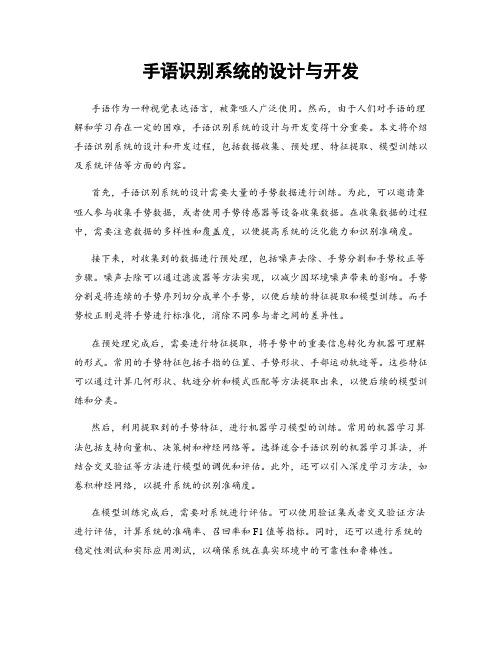
二、系统框架及实现过程基于智能眼镜的手语识别系统主要包括以下几个模块:眼镜摄像头模块、图像传输模块、手势识别模块、语音合成模块和文本显示模块。
图1展示了系统的整体框架。
1. 眼镜摄像头模块智能眼镜配备了高区分率的摄像头,用于抓取用户前方的手语动作。
摄像头的区分率和帧率对于手语识别的准确性和实时性分外重要。
2. 图像传输模块摄像头抓取到的视频流将通过图像传输模块传送至处理单元。
由于实时性要求,传输速率需要足够快,以保证识别过程的准时性。
3. 手势识别模块手势识别模块是整个系统的核心部分。
本系统接受深度进修算法,对传输过来的图像流进行实时处理和手势识别。
起首,通过对训练数据集的进修,建立手势库,使用卷积神经网络(CNN)进行手势特征提取。
然后,通过对提取的特征进行分类和识别,确定手语动作对应的文字或声音。
4. 语音合成模块通过语音合成技术,将手语识别结果转化为声音,并输出到用户耳机或扬声器中。
语音合成模块应具备良好的自然语音合成效果,以确保用户能够明晰准确地听到识别结果。
5. 文本显示模块除了语音合成,手语识别结果还会以文字的形式显示在用户眼镜的显示屏上。
文字显示模块应具备良好的显示效果,防止因字体大小或显示方式不当而对用户体验造成影响。
三、系统特点与创新基于智能眼镜的手语识别系统具有以下特点与创新。
1. 实时性:智能眼镜通过聪明晰度的摄像头和快速的图像传输模块,能够实时抓取和传输手语动作,实现几乎无延迟的手语识别。
2. 准确性:系统接受深度进修算法进行手势识别,通过大量的训练数据集和卷积神经网络,能够提高手势识别的准确率。
手语识别系统的设计与开发
手语识别系统的设计与开发手语作为一种视觉表达语言,被聋哑人广泛使用。
然而,由于人们对手语的理解和学习存在一定的困难,手语识别系统的设计与开发变得十分重要。
本文将介绍手语识别系统的设计和开发过程,包括数据收集、预处理、特征提取、模型训练以及系统评估等方面的内容。
首先,手语识别系统的设计需要大量的手势数据进行训练。
为此,可以邀请聋哑人参与收集手势数据,或者使用手势传感器等设备收集数据。
在收集数据的过程中,需要注意数据的多样性和覆盖度,以便提高系统的泛化能力和识别准确度。
接下来,对收集到的数据进行预处理,包括噪声去除、手势分割和手势校正等步骤。
噪声去除可以通过滤波器等方法实现,以减少因环境噪声带来的影响。
手势分割是将连续的手势序列切分成单个手势,以便后续的特征提取和模型训练。
而手势校正则是将手势进行标准化,消除不同参与者之间的差异性。
在预处理完成后,需要进行特征提取,将手势中的重要信息转化为机器可理解的形式。
常用的手势特征包括手指的位置、手势形状、手部运动轨迹等。
这些特征可以通过计算几何形状、轨迹分析和模式匹配等方法提取出来,以便后续的模型训练和分类。
然后,利用提取到的手势特征,进行机器学习模型的训练。
常用的机器学习算法包括支持向量机、决策树和神经网络等。
选择适合手语识别的机器学习算法,并结合交叉验证等方法进行模型的调优和评估。
此外,还可以引入深度学习方法,如卷积神经网络,以提升系统的识别准确度。
在模型训练完成后,需要对系统进行评估。
可以使用验证集或者交叉验证方法进行评估,计算系统的准确率、召回率和F1值等指标。
同时,还可以进行系统的稳定性测试和实际应用测试,以确保系统在真实环境中的可靠性和鲁棒性。
综上所述,手语识别系统的设计与开发涉及到数据收集、预处理、特征提取、模型训练和系统评估等步骤。
通过合理的设计和开发过程,可以实现准确、高效的手语识别系统,为聋哑人的交流和生活提供便利。
未来,随着人工智能和深度学习技术的进一步发展,手语识别系统有望实现更高的准确率和更广泛的应用。
《2024年手语识别系统设计》范文

《手语识别系统设计》篇一一、引言手语是聋人群体主要的交流方式,随着信息技术的飞速发展,手语识别系统的设计变得越来越重要。
然而,手语识别的准确性和效率仍是待解决的挑战。
本文将深入探讨手语识别系统设计的基本概念、目的及重要性,并提供系统设计的全面概述。
二、手语识别系统概述手语识别系统是一种将手语动作转化为文字或语音信息的技术。
该系统主要包括图像采集、预处理、特征提取、模式识别和后处理等几个主要部分。
图像采集是获取手语动作的原始数据,预处理则是对原始数据进行清洗和增强,以便后续的特征提取和模式识别。
特征提取是从预处理后的数据中提取出手语的关键特征,模式识别则是根据这些特征对手语进行分类和识别。
三、手语识别系统设计1. 硬件设计手语识别系统的硬件设计主要包括图像采集设备,如高清摄像头或穿戴式设备。
为了获取更精确的手语数据,我们需要选择高分辨率、高帧率的摄像头。
此外,为了方便用户使用,还可以设计穿戴式设备,如手套或腕带等,以实时捕捉手部动作。
2. 软件设计软件设计是手语识别系统的核心部分,主要包括图像处理算法、特征提取算法和模式识别算法等。
(1)图像处理算法:图像处理算法主要用于对原始图像进行预处理,如去噪、二值化、边缘检测等。
这些算法可以有效地提高图像的清晰度和对比度,为后续的特征提取和模式识别提供更好的数据基础。
(2)特征提取算法:特征提取算法是手语识别的关键技术之一。
常用的特征提取算法包括基于统计的方法、基于机器学习的方法和基于深度学习的方法等。
这些算法可以从图像中提取出手语的关键特征,如手势形状、动作轨迹等。
(3)模式识别算法:模式识别算法是手语识别的核心部分。
常用的模式识别算法包括基于规则的方法、基于统计的方法和基于深度学习的方法等。
这些算法可以根据提取出的特征对手语进行分类和识别。
四、系统实现与优化在系统实现过程中,我们需要对算法进行不断的调试和优化,以提高系统的准确性和效率。
此外,我们还需要考虑系统的实时性和用户体验等因素。
手语翻译系统手语翻译装置及手语翻译方法

手语翻译系统手语翻译装置及手语翻译方法
一、手语中文翻译系统
手语中文翻译系统是一种以视频为基础的语音识别、处理和生成系统,它能够将手势语言转换成中文文本。
该系统应用了机器学习、图像处理等
技术,能够识别出用户的手势并转换成文字。
它还支持智能化技术,能够
根据用户的语言习惯自动调整翻译结果,从而提高翻译准确率。
二、手语中文翻译装置
手语中文翻译装置是用于实现手势语言识别及翻译的设备。
装置的主
要部件包括摄像头、录音模块、处理器、显示器等。
摄像头用于捕捉手势
输入,录音模块用于录取说出的中文字,处理器用于处理捕捉的手势信息,并将其转换为机器可以理解的信息,最后在显示器上将手势信息转换成中
文文本,供用户查看。
三、手语中文翻译方法
手语中文翻译方法主要包括三步:
(1)捕捉手势输入:首先,使用摄像头捕捉用户手势输入,并存储
在计算机中;
(2)处理手势输入:然后,运用计算机视觉技术和机器学习技术对
存储的手势图像进行处理,并将其分类存储;
(3)生成中文文本:最后,运用语音识别技术将存储的手势图像转
换成中文文本,供用户查看。
手势识别装置的设计与实现

2019年第18期信息与电脑China Computer & Communication软件开发与应用手势识别装置的设计与实现杨 蕊 米文辉(陕西科技大学镐京学院,陕西 西安 712046)摘 要:手势识别已成为人机交互技术的关键之一。
笔者基于传感芯片FDC2214设计制作了手势识别装置和STM32F103C8T6微控制器控制系统,能够通过JC22-V05串口显示器显示测试结果。
考虑到手势的大小,对“石头”“剪刀”“布”和“1”“2”“3”“4”“5”手势进行了识别实验,结果表明本算法可行。
关键词:手势识别;FDC2214;STM32F103C8T6中图分类号:TP391.41 文献标识码:A 文章编号:1003-9767(2019)18-104-02Design and Implementation of Gesture Recognition DeviceYang Rui, Mi Wenhui(Haojing College of Shaanxi University of Science & Technology, Xi'an Shaanxi 712046, China)Abstract: Gesture recognition has become one of the key technologies of human-computer interaction. Based on the sensor chipFDC2214, a gesture recognition device and a STM32F103C8T6 microcontroller control system are designed and manufactured, which can display the test results through JC22-V05 serial port display. Considering the size of gestures, the recognition experiments of "stone", "scissors", "cloth" and "1", "2", "3", "4" and "5" gestures are carried out. The results show that the algorithm is feasible.Key words: gesture recognition; FDC2214; STM32F103C8T61 设计方案本系统主要由输入切换部分、振荡部分、分频部分、单片机部分、显示部分、键盘部分和FDC2214的传感平面组成,电容式传感器的测量电路就是将电容式传感器看成一个电容并转换成电压或其他电量的电路[1-2]。
《手语识别系统设计》范文

《手语识别系统设计》篇一一、引言随着社会的发展和信息技术的不断进步,对于残障人士特别是听障人士的交流需求越来越迫切。
手语识别系统作为实现听障人士与健听人士无障碍沟通的重要工具,其设计和应用已经成为现代信息技术发展的重要方向。
本文将对手语识别系统的设计进行详细探讨,旨在为相关研究和应用提供理论和实践的参考。
二、手语识别系统的设计目标手语识别系统的设计目标主要包括准确性、实时性、易用性和通用性。
准确性是手语识别系统的核心,要求系统能够准确识别出手语动作的含义;实时性则保证手语能够被及时识别并转换为文字或语音信息;易用性则要求系统操作简便,无需专业培训即可使用;通用性则要求系统能够适应不同地域、不同文化背景的手语动作。
三、手语识别系统的技术设计手语识别系统的技术设计主要涉及传感器技术、图像处理技术和机器学习技术。
传感器技术用于捕捉手部动作信息,如手套式传感器、摄像头等;图像处理技术则对捕捉到的手部动作信息进行预处理,如去噪、增强等;机器学习技术则用于训练和优化识别模型,提高识别的准确性和效率。
四、手语识别系统的具体设计1. 数据采集与预处理:通过传感器或摄像头等设备,采集手语动作数据,并进行预处理,如去除噪声、归一化等操作。
2. 特征提取:从预处理后的数据中提取出手语动作的关键特征,如手势形状、动作轨迹等。
3. 模型训练与优化:利用机器学习算法,对手语动作特征进行训练和优化,建立手语识别模型。
4. 识别与转换:将实时捕捉的手语动作信息输入到识别模型中,进行实时识别,并将识别的手语动作转换为文字或语音信息。
5. 用户界面设计:设计简洁、直观的用户界面,方便用户使用和操作。
五、手语识别系统的应用场景手语识别系统的应用场景广泛,包括教育、医疗、社交等领域。
在教育领域,手语识别系统可以帮助听障学生更好地融入学校生活,提高学习效率;在医疗领域,手语识别系统可以帮助医护人员与听障患者进行无障碍沟通,提高医疗服务质量;在社交领域,手语识别系统可以扩大听障人士的社交圈子,提高他们的生活质量。
《手语识别系统设计》范文
《手语识别系统设计》篇一一、引言手语作为聋人群体表达和沟通的主要方式,具有极其重要的意义。
随着科技的发展,手语识别系统的设计日益成为关注的焦点。
该系统能够将手语动作转化为语音或文字信息,使得聋人群体能够更好地与他人进行交流。
本文将详细探讨手语识别系统的设计思路、方法及实现过程。
二、系统需求分析在设计手语识别系统之前,首先需要进行系统需求分析。
这一阶段主要关注以下几个方面:1. 目标用户:系统主要服务于聋人群体,因此需要深入了解他们的需求和习惯。
2. 功能需求:系统应具备识别手语动作、将手语转化为语音或文字信息、提供实时交互等功能。
3. 性能要求:系统应具备高识别率、低延迟、易操作等特点。
4. 安全性和可靠性:确保系统数据的安全性和系统的稳定性。
三、系统设计在系统需求分析的基础上,进行系统设计。
手语识别系统设计主要包括硬件设计和软件设计两部分。
(一)硬件设计硬件部分主要包括摄像头、处理器、存储设备等。
摄像头用于捕捉手语动作,处理器负责处理图像信息,存储设备用于存储识别结果和系统数据。
此外,还需要考虑设备的便携性、耐用性等因素。
(二)软件设计软件部分主要包括图像处理、手语识别、语音合成或文字转换等模块。
图像处理模块负责将摄像头捕捉的图像信息转化为数字信号;手语识别模块通过算法对手语动作进行识别;语音合成或文字转换模块将识别的手语转化为语音或文字信息。
此外,还需要设计友好的人机交互界面,以便用户能够方便地使用系统。
四、算法选择与实现在手语识别系统中,算法的选择与实现是关键。
常用的算法包括深度学习、机器视觉等。
其中,深度学习算法在图像处理和模式识别方面具有较高的准确率,适用于手语识别。
在实现过程中,需要使用大量的手语数据对模型进行训练,以提高识别率。
此外,还需要对算法进行优化,以降低计算复杂度,提高系统的实时性。
五、系统测试与评估在完成手语识别系统的设计和实现后,需要进行系统测试与评估。
测试阶段主要包括功能测试、性能测试、安全性和可靠性测试等。
《手语识别系统设计》范文

《手语识别系统设计》篇一一、引言手语是聋人群体进行交流的主要方式,然而,对于非聋人群体来说,理解和掌握手语是一项困难的任务。
随着科技的发展,手语识别系统的设计成为了研究的热点。
这种系统可以将手语动作转化为文字或语音信息,使得不懂手语的人也能理解和交流。
本文将探讨手语识别系统的设计,包括其重要性、设计目标、技术实现和未来发展方向。
二、手语识别系统的重要性手语识别系统对于聋人群体和社会的交流具有重要意义。
首先,它可以帮助不懂手语的非聋人群体理解和掌握手语,从而更好地与聋人群体进行交流。
其次,手语识别系统可以打破语言障碍,提高聋人群体在社会中的参与度和自信心。
最后,手语识别系统的应用可以推动科技进步,为人工智能、机器学习和计算机视觉等领域的研究提供新的挑战和机遇。
三、设计目标手语识别系统的设计目标主要包括准确性、实时性、用户体验和可扩展性。
首先,准确性是手语识别系统的核心目标,只有准确识别出手语动作的含义,才能实现有效的交流。
其次,实时性是保证交流顺畅的关键因素,系统需要能够快速响应并处理手语动作。
此外,用户体验也是非常重要的,系统需要简洁易用,符合用户的使用习惯。
最后,可扩展性是保证系统能够适应不同手语和用户需求的关键因素。
四、技术实现手语识别系统的技术实现主要包括图像采集、预处理、特征提取、分类识别和输出等步骤。
首先,图像采集需要使用高精度的摄像头对手部动作进行捕捉和记录。
其次,预处理是对图像进行去噪、二值化等处理,以便更好地提取特征。
然后,特征提取是通过计算机视觉技术对手部动作的特征进行提取和表示。
接着,分类识别是通过机器学习算法对提取的特征进行分类和识别,得出手语动作的含义。
最后,输出是将识别的结果以文字或语音的形式呈现给用户。
五、技术挑战与解决方案在手语识别系统的设计过程中,会面临许多技术挑战。
首先,手语的多样性和复杂性使得识别难度较大。
针对这个问题,可以通过采集多种手语数据和建立大规模的手语数据库来提高识别的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词:弯曲传感器ꎻ 加速度传感器ꎻ 手语识别ꎻ 隐马尔科夫模型ꎻ 语音播报 中图分类号:TP 212ꎻTP 391 文献标识码:A
随着社会的进步ꎬ聋哑人正逐步融入大众生活ꎬ 但是对于正常人来说能使用手语的人却很少ꎬ这也 造成了聋哑人在日常生活中与普通人的交流障碍ꎮ 聋哑人与正常人 之 间 的 交 流 主 要 有 两 种 方 式: 手 语 翻译和书面表达[1] ꎮ 但是手语翻译需要专业人员和 高昂的费用ꎬ书面表达主要通过画图或文字交流ꎬ效 率不高且不方便ꎮ 在这个背景下ꎬ本文提出一种基于 弯曲传感器的手语识别装置ꎬ不仅能够降低手语翻译 成本ꎬ而且能够实现便捷高效的手语识别ꎮ
另外模板库可以通过使用者的训练来进行完 善ꎬ让系统根据使用者的自 身 习 惯 建 立 适 合 的 数 据库ꎮ 2. 3 手指语的实现
系统运行中会不断地进行弯曲电阻的电压值采 集ꎬ将电压值划分为 0 ~ 9 不同的等级ꎬ10 个手指的 弯曲程度记录在一维数组中ꎬ一次采集完成即对模 板库进行对比ꎬ寻找是否相对应的词条ꎬ如果找到匹 配词 条 输 出 数 据ꎮ 手 指 电 压 采 集 可 能 是 { 2080ꎬ 2472ꎬ 2462ꎬ 2466ꎬ 2468ꎬ 2467ꎬ 2477ꎬ 2453ꎬ 2480ꎬ 2446} 对应的弯曲等级是{2ꎬ9ꎬ9ꎬ9ꎬ9ꎬ9ꎬ9ꎬ9ꎬ9ꎬ9} ꎮ 这样在模板库里就能找出对应的词条 Aꎮ 2. 4 手势语的识别
2. 2 手指语模板库的建 由实验测量可知ꎬ当手指伸直时ꎬ采集弯曲传感
器两端电压约为 1. 6 Vꎬ当手指完全弯曲大约为 2 V 左右ꎮ STM32 的 AD 采集分辨率是 12 位ꎬ即将 0 ~ 3. 3V 均分为 0 ~ 4096ꎬ所以对应单片机所采集到的 值应该是 1986 ~ 2482 左右ꎬ两者相差 500 个值ꎮ 以 50 个数为界将手指分为十个不同的弯曲程度ꎬ来表 示手指当前的状态ꎬ建立手指语的模板库ꎮ 定义一 个数组ꎬ每个元素代表一个手指ꎬ元素的值代表手指 的弯曲程度ꎬ在未接受训练计划前ꎬ对系统采用均分 制ꎬ将 1980 ~ 2480 均分为十份以 0 ~ 9 代表不同的 程度ꎮ 例如手势 A 只有一个大拇指伸直ꎬ则对应的 数组可以表示为 {2ꎬ9ꎬ9ꎬ9ꎬ9 ꎬ9ꎬ9ꎬ9ꎬ9ꎬ9} ꎮ
1 总体设计
牙模块、显示模块、语音模块组成ꎮ 本装置由 STM32 作主控ꎬ通过弯曲传感器和加速度传感器分别采集 手指、手腕的运动信息并转化为电压信号传给主控ꎬ 再与已建立好的手语模块库数据相比较ꎬ从而判定 所示手语含义ꎬ由显示屏显示同时由语音模块播报ꎮ 总体结构图如图 1 所示ꎮ
2 功能实现
2. 1 基于弯曲传感器的手指弯曲识别 RFP 弯曲传感器是柔性可穿戴的薄膜式弯曲传
手语不仅包括手指语ꎬ通常还有手掌的空间运 动ꎬ二者结合共同构成手语ꎮ 所以如果要更全面的 进行手语识别ꎬ需要在手指语的基础上添加手掌的 姿态解算ꎮ 2. 4. 1 手掌姿态的检测
本系统采用 MPU605 六轴陀螺仪传感器ꎬ可以 测量三轴加速度、三轴角速度ꎬ并且内部自带了硬件 滤波ꎬ 可 以 减 少 程 序 的 繁 琐ꎮ 本 设 计 所 采 用 的 MPU6050 传 感 器 自 带 数 字 运 动 处 理 器 DMPꎬ 且 InvenSense公司提供了一个 MPU6050 传感器的嵌入 式运动驱动库ꎬ可以将原始数据结合 DMP 输出的 6 轴姿态解算数据ꎬ直接转换成四元数输出ꎬ可以很方 便地计算出欧拉角ꎬ从而得到俯仰角( P)ꎬ横滚角 (R)ꎬ航向角( Y) [4] ꎮ 核心计算:四元数就是包含 四个元的一种数ꎬ可表示为 Q = q0 - qv = q0 + q1 i + q2 j + q3 k 其中ꎬq0 ꎬq1 ꎬq2 和 q3 都是实数ꎬq0 称为实 部、qv = q1 i + q2 j + q3 k 称为虚部ꎮ
图 1 总体结构图
本手语识别装置总体结构主要由 STM32 微控 制器、RFP 弯曲传感器、MPU6050 加速度传感器、蓝
图 2 薄膜式弯曲传感器
收稿日期:2019 - 04 - 24 作者简介:邢 倩(1992 ̄ ) ꎬ女ꎬ河南商丘人ꎬ本科生ꎬ研究方向为模糊控制ꎮ
36
山 西 电 子 技 术 2019 年
q0 = quat[0] / q30ꎻ q1 = quat[1] / q30ꎻ q2 = quat[2] / q30ꎻ q3 = quat[3] / q30ꎻ P = asin( - 2 ∗q1 ∗q3 + 2 ∗q0 ∗q2 ) ∗57. 3 + P - error R = atan2(2∗q2 ∗q3 + 2∗q0 ∗q1 ꎬ - 2∗q1 ∗q1 - 2 ∗q2 ∗q2 + 1) ∗57. 3 + R - error Y = atan2(2∗( q1 ∗q2 + q0 ∗q3 ) ꎬ0∗q0 + q1 ∗q1 - q2 ∗q2 - q3 ∗q3 ) ∗57. 3 + Y - error
山西电子技术 2019 年第 4 期
应用实践
文章编号:1674  ̄ 4578 ( 2019 ) 04  ̄ 0035  ̄ 03
一种手语识别装置设计
邢 倩ꎬ 方全彪ꎬ 许梦文ꎬ 宋晓娜ꎬ 王新勇
( 河南科技大学ꎬ河南 洛阳 471000)
摘 要:手语作为聋哑人群最常使用的交流方式ꎬ却因为手势语在大众中的普及程度低ꎬ造成 了聋哑人与普通人的交流障碍ꎮ 为解决这一问题ꎬ本文提出一种手语识别装置的设计ꎬ它主要是以 普通手套为载体ꎬ通过弯曲传感器和加速度传感器来采集手的运动轨迹和手势特征ꎬ并将信息传递 到主控器进行处理ꎬ进一步与已建立的手语模板库进行比较ꎬ再通过显示模块和语音模块进行实时 显示和播报ꎮ