基于ADAMS的摆盘机构动力学仿真分析
实验二 单摆机构的动力学模拟
实验二单摆机构的动力学模拟一、实验目的1.掌握多体动力学分析软件ADAMS中实体建模方法;2.掌握ADAMS中施加约束和驱动的方法;3.计算出单摆运动的位移、速度和加速度。
二、实验设备和工具1.ADAMS软件;2.CAD/CAM机房。
三、实验原理按照单摆机构的实际工况,在软件中建立相应的几何及约束模型,即按照单摆机构的实际尺寸,建立单摆几何实体模型;把摆臂和大地之间的实际连接简化成铰连接,从而在软件中建立其连接副模型;按照摆臂初始运动的参数,如初始转角和转速建立相应的驱动模型;然后利用计算机进行动力学模拟,从而可以求得摆臂在实际工况下的任何时间、任何位置所对应的位移、速度加速度,以及摆臂和大地铰接点处的约束反力等一系列参数。
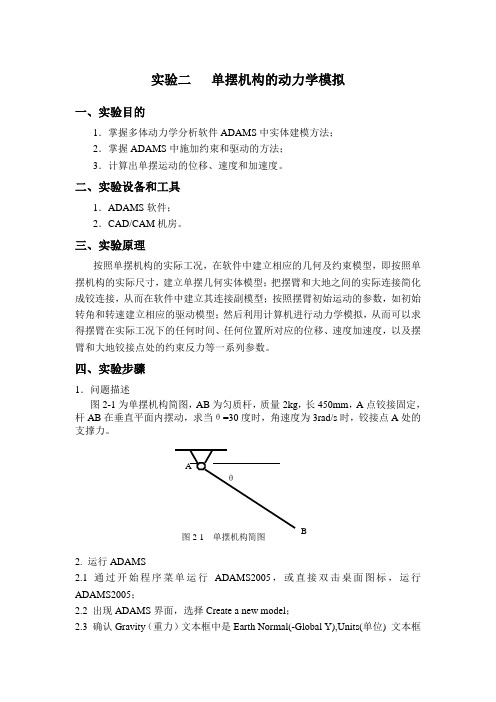
四、实验步骤1.问题描述图2-1为单摆机构简图,AB为匀质杆,质量2kg,长450mm,A点铰接固定,杆AB在垂直平面内摆动,求当θ=30度时,角速度为3rad/s时,铰接点A处的支撑力。
2. 运行ADAMS2.1 通过开始程序菜单运行ADAMS2005,或直接双击桌面图标,运行ADAMS2005;2.2 出现ADAMS界面,选择Create a new model;2.3 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units(单位) 文本框中是MM ,K ,S ,确认后单击OK 按钮;2.4 在Settings 下拉菜单中选择Working Grid ,系统打开参数设置对话框,在spacing 栏,X 和Y 都输入25mm 。
3. 建立几何模型3.1 用鼠标右键单击几何工具箱,弹出级联图标,用鼠标左键选中杆件图标;3.2 系统打开参数设置对话框,如图2-2所示,确认在工具箱下方文本框中显示New Part 。
选中Length 选项,输入45.0cm ,即摆臂长度。
选种width 选项,输入2.0cm ,选中Depth 选项,输入2.75cm ;3.3 按F4打开坐标框,鼠标单击(-225,0,0)作为摆臂的左侧起点,然后单击右侧水平方向任一点,ADAMS 自动生成摆臂,如图2-3所示;4. 设置模型参数4.1 设置摆臂质量鼠标右键单击摆臂Part_2,在右键打开的快捷菜单中选择Modify ,弹出修改对话框,在Define mass by 栏中选择User Input.,在Mass 栏输入2.0,单击OK 按钮。
基于Adams的摆杆输送机动力学仿真分析
龙源期刊网
基于Adams的摆杆输送机动力学仿真分析作者:高先海韩业鹏张群
来源:《计算机辅助工程》2012年第06期
摘要:采用Adams脚本语言建模,自动完成摆杆输送机整体系统的轨道、链条、摆杆和工件之间的装配约束和载荷边界条件的设定等.对某卡车白车身涂装过程进行动力学仿真分
析,求得系统整体运行时所需的驱动力大小、链节间的相互作用力和进行静力学分析所需的载荷条件等,分析结果可指导摆杆输送机的整体设计.
关键词:
汽车涂装;电泳线;链条;装配约束;驱动力; Adams;脚本语言
中图分类号: TH123 文献标志码: B。
msc adams多体动力学仿真基础与实例解析

MSC Adams是一种常用的多体动力学仿真软件,它可以用于研究和分析机械系统、运动学和动力学特性。
下面简要介绍MSC Adams的基础知识和实例解析:
1. 多体动力学基础:
-刚体和连接:MSC Adams使用刚体模型来表示物体,可以定义物体的质量、惯性矩阵和几何形状。
通过连接件(约束)将多个物体连接在一起,可以模拟各种机构系统。
-动力学模型:通过定义物体的受力和力矩,可以建立动力学模型。
这些力可以包括重力、摩擦力、弹簧力等,可以根据需要进行自定义。
-运动学分析:可以分析物体的位置、速度、加速度以及各个连接件之间的相对运动关系。
2. 实例解析:
-车辆悬挂系统:通过建立车辆悬挂系统的多体动力学模型,可以分析车轮与地面的接触力、悬挂系统的行程和动态响应等。
这有助于改善车辆的悬挂性能和乘坐舒适性。
-机械臂运动学和动力学分析:通过建立机械臂的多体动力学模型,可以分析机械臂在不同工作状态下的位姿、速度和加速度。
这有助于优化机械臂的设计和运动控制算法。
-飞机起落架系统:通过建立飞机起落架系统的多体动力学模型,
可以分析起落架在着陆和起飞时的动态响应和受力情况。
这有助于改进起落架的设计和耐久性。
-振动系统:通过建立振动系统的多体动力学模型,可以分析系统的固有频率、振动模态和受力情况。
这有助于评估结构的稳定性和设计适当的减振措施。
以上是MSC Adams多体动力学仿真的基础知识和一些实例解析。
通过使用MSC Adams,工程师和研究人员可以更好地理解和优化复杂机械系统的动力学特性。
基于adams的摆环机构运动仿真及优化设计
基于adams的摆环机构运动仿真及优化设计:
摆环机构是一种基本的机械运动装置,它具有结构简单、节省空间、运动可靠性高等
特性,被广泛应用于机床、注塑机等多个机械工程。
Adams是用于机械系统动力学仿真的一种软件,它可以用来仿真摆环机构的运动时响应特性,为优化设计提供了有效支持。
Adams能够仿真摆环机构流程和多个运动参数之间的相互作用,可以准确表示摆环机
构运动变化,是实现摆环机构优化设计的重要工具。
举例来说,Adams能够根据摆环机构
内部参数计算两个自由度的力学链条参数,并计算其运动特性,为给定的摆环机构结构指
定精确的位置。
此外,由于Adams可以模拟摆环机构内部多个参数之间的相互影响,因此
能够准确预测摆环机构的运动变化。
Adams的优势还可以体现在优化设计中。
借助于Adams,我们可以从一系列不同的输
入参数,其中包括质量、运动参数、力学链条等参数,寻求摆环机构最优解。
Adams还可
以模拟出足够精确的摆环机构运动轨迹,利用这些模拟数据来确定新的摆环机构结构及运
动参数的一系列范畴,通过这种设计也可以实现优化设计的效果。
另外, Adams还可以实现精确模拟,以及流体动力学分析等多种功能,同时也可以进行参数优化和对比分析,根据收集的实际数据,快速验证摆环机构的结构参数和运动参数,从而可以更有效地实现优化设计,提高生产效率。
总之,Adams可以用于摆环机构的仿真和优化设计,其准确的运动仿真和多功能优化
支持使得摆环机构可以更加精确的满足设计要求,从而提升设计效率。
adams动力学仿真原理
adams动力学仿真原理
Adams是一种基于动力学原理进行仿真的软件,它使用多体
动力学理论和计算力学算法,对系统中的物体进行建模和仿真,以模拟真实的物体运动和相互作用。
Adams的仿真原理主要基于以下几个方面:
1. 多体动力学:Adams使用多体动力学理论来描述系统中的
物体运动。
多体动力学是物体受力和受力作用导致的加速度之间的关系。
通过建立质点、刚体或弹性体等物体的动力学模型,并考虑物体之间的相互作用,可以求解物体的运动轨迹、速度和加速度等。
2. 约束条件:Adams支持对系统中物体之间的各种约束条件
进行建模和仿真。
约束条件可以是几何约束,如固定连接、旋转关节、滑动关节等,也可以是物理约束,如弹簧、阻尼器等。
Adams利用这些约束条件来限制物体的运动范围,并求解约
束条件下的系统运动。
3. 接触和碰撞:Adams还考虑了系统中物体之间的接触和碰撞。
通过建立接触模型和碰撞模型,Adams可以模拟物体之
间的接触力和碰撞力,并根据物体的质量、形状和速度等参数计算物体的反应。
4. 动力学求解:Adams使用高效的动力学求解算法,通过求
解物体运动的微分方程组,得到物体的运动轨迹、速度和加速度等。
求解过程中,Adams考虑了物体之间的相互作用和约
束条件,并根据物体的质量、惯性、摩擦力等参数计算物体的运动状态。
总的来说,Adams的仿真原理基于多体动力学理论和计算力学算法,并考虑了物体之间的约束、接触和碰撞等相互作用,以模拟系统中物体的真实运动和行为。
adams动力学仿真原理
adams动力学仿真原理一、引言动力学仿真是一种模拟真实物体运动及其相互作用的方法。
在工程领域,动力学仿真被广泛应用于设计、分析、优化以及预测产品或系统的性能。
Adams动力学仿真软件是一款功能强大的工程仿真软件,能够模拟具有复杂运动学和动力学特性的多体系统。
本文将介绍Adams动力学仿真的原理和应用。
二、运动方程和受力分析Adams基于牛顿力学和欧拉法则,通过求解运动方程来描述仿真对象的运动。
运动方程可以通过对系统中所有物体的质量、惯性矩阵以及施加在物体上的外力进行受力分析得到。
Adams提供了丰富的数学建模工具,能够精确地描述物体的几何特性、物理特性以及约束关系。
三、约束建模约束是Adams仿真中的重要概念,用于描述系统中物体之间的约束关系。
Adams支持多种约束类型,包括关节约束、接触约束、力学约束等。
通过合理地定义约束条件,可以准确地模拟物体间的接触、连接和约束。
在进行仿真前,需要根据系统的需求设置适当的约束条件,以确保仿真结果的准确性和可靠性。
四、力学属性在Adams中,物体的力学属性包括质量、惯性、刚度、阻尼等。
通过设置这些属性,可以模拟物体运动时受到的惯性力、重力、弹力、摩擦力等作用。
适当地设置力学属性,能够更加真实地模拟物体的运动行为,并实现精确的仿真分析。
五、控制器建模为了模拟真实系统中的控制装置,Adams提供了控制器建模工具。
控制器可以对系统中的物体施加不同的力或者施加控制策略来实现特定的运动目标。
通过设置适当的控制器参数和策略,可以对系统进行精确的控制和仿真分析。
六、仿真结果分析Adams提供了丰富的仿真结果分析工具,能够对仿真结果进行可视化、数据分析和优化。
通过这些工具,用户可以直观地观察仿真结果,分析系统的运动特性、力学响应以及能耗情况。
此外,Adams还支持与其他工程软件的数据交换,方便用户将仿真结果与实际工程设计相结合。
七、应用案例Adams在许多领域都得到了广泛的应用,例如汽车工业、航空航天、机械设计等。
基于ADAMS的曲柄摆杆机构的运动分析

基于ADAMS的曲柄摆杆机构的运动分析作者:程熊豪来源:《科技资讯》 2015年第2期程熊豪(武汉理工大学物流学院湖北武汉 430063)摘要:曲柄摆杆机构能将旋转运动转换为直线运动,常常作为动力源(如旋转式电动机)与直线运动形式的执行机构,是现代机械设备中一种十分常见的核心执行装置。
针对某工程中曲柄摆杆机构设计中的运动学问题,基于ADAMS仿真软件建立了曲柄摆杆机构的虚拟样机模型,并对虚拟样机模型进行运行学特性分析与仿真,分析了作为执行机构的滑块上工作点的位移、运动速度和加速度变化规律,得出作为动力输入曲柄的驱动力矩曲线,从而为曲柄摆杆机构的结构设计和控制系统的设计提供参考。
关键词:曲柄摆杆运动分析 ADAMS 机构中图分类号:TH112 文献标识码:A 文章编号:1672-3791(2015)01(b)-0014-02曲柄摆杆机构具有构件形状简单、加工方便、可承受较大载荷等诸多优点,因此,曲柄摆杆机构在现代机械设备中有着非常广泛的应用。
该机构可以将周期转动的运动形式转化为直线运动,而且具有结构简单、制造容易、工作可靠等优点,因此在工程中得到了广泛的应用。
最典型的是牛头刨床机构。
但是,传统的曲柄摆杆机构设计多采用图解法或实验法,其过程复杂繁琐、设计周期长、稳定性差、精度不高,难以达到设计要求。
尽管采用解析法可以得到较高的计算精度,但该方法存在推导公式复杂,计算工作量大,且获得的结果过于抽象,达不到形象直观的要求。
ADAMS是机械系统动态仿真软件的应用软件,用户可以运用该软件非常方便地对虚拟样机进行静力学、运动学和动力学分析,可视化地输出位移、速度、加速度和反作用力曲线。
通过ADAMS软件对曲柄摆杆机构进行运动学分析,能够克服图解法分析过程复杂、精度低等问题。
针对某一项目,利用曲柄摆杆机构的滑块作往复直线运动的功能,实现滑块到达目标位置后可以回到初始位置的基本动作。
同时,设计曲柄摆杆机构时需要对其进行运动分析,以判断能否完成所需动作要求。
基于ADAMS的摆盘机构动力学仿真分析

pae adst l , es i he — i e s nlm d 1 yapyn eA A -o w rf r y a c a s f t n t tre dm ni a o eB p l gt D MS s t ae nmi a l i o s o . i h f d o sn y s
cr c n ei l, d teds ra c asd b s in e t ew e i o d ai o n so — or t d rl ea i ub ec ue ymi g m n b te nps na xsf l k i b e a b a n h t n l a t n i t n d a e s a s uvs r oe i i teps na dc l drw l n et q eT ersac i a e ,s la a l i c re f frewt n h i o yi e a dt ru. ee rh w l ys n o h t n n l a h o h
刘剑 钊 党建军 张进 军 ( 中国工程物理研究院 总体工程研究所, 绵阳 6 10 )(西北工业大学 航海学院, 290 西安 7 07 ) 10 2
ADAMS- a e y a c s mua in a ay i o b l— lt c a im b s d d n mi i lt n lss f r o wo be pa e me h ns LU J n za I A G J njn, H N i-u I i —h o, N i -u 2Z A G J jn a D a n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1000.0 500.0 0.09
0.0 0.075 -500.0 -1000.0 0.06
-1500.0 0.045
-2000.0
-2500.0 0.03 0.0
0.0187
CM_Position.X CM_Velocity.X CM_Acceleration.X
10.0 5.0
0.0
-5.0
0.0375 Time(s)
76
文章编号:1001-3997(2012)04-0076-02
机械设计与制造 Machinery Design & Manufacture
第4期 2012 年 4 月
基于 ADAMS 的摆盘机构动力学仿真分析
刘剑钊 1 党建军 2 张进军 2 (1 中国工程物理研究院 总体工程研究所,绵阳 621900)(2 西北工业大学 航海学院,西安 710072)
(4)
缸体固定不旋转,摆盘的运动只是空间周期性摆动。与传统平面曲 柄连杆活塞发动机相比,具有结构简单紧凑,功率质量比大,振动噪 声小,背压对发动机功率影响小等特点。摆盘机构运动复杂,参数繁
任一时刻 tn 的位置确定,可由约束方程的牛顿—拉夫森
(Newton-Raphson)迭代方法求得:坠准 坠qj
图 1 摆盘机构整机装配模型
3.2 ADAMS 仿真模型
在确认没有装配体模型丢失或失真的情况下,设置各构件
的材料密度,计算得到各构件的质量。通过对构件添加约束(运动 副、驱动、阻力矩、接触力),使各个独立的构件形成有机整体,反 映机构运动结构特点。完成上述前处理后,得到了摆盘机构的 ADAMS 仿真模型。
3.1 三维实体模型
针对摆盘机构有多个零件组成,个别零件结构复杂,直接利
用 ADAMS 自身建模功能很难完成三维实体建模的问题,采用
*来稿日期:2等:基于 ADAMS 的摆盘机构动力学仿真分析
77
UG NX 建模,建模过程遵循摆盘机构自身原理结构进行从下至 顶式方法,通过建立各部件的三维实体模型,进行装配并最终完 成整机建模,如图 1 所示。
(2)
* * k
式(1)和(2)可以统一表示为:准(q,t)=
准(q,t)
D
=0
准 (q,t)
(3)
tn 时刻速度、加速度的确定,可由约束方程求一阶、二阶时间
导数得到:坠准 q觶 =- 坠准 坠q 坠t
(6)
觶2
nn
2
觶
ΣΣ 坠准
q咬 =-
坠觶
觶
Ω
坠 t 觶
觶觶
22
觶
+
k=1
l=1
坠准 坠qk 坠ql
(2School of Marine Engineering,Northwestern Polytechnical University,Xi’an 710072,China)
【摘 要】简要介绍了摆盘机构组成和工作原理,建立摆盘机构三维模型,运用机械系统动力学分 析软件 ADAMS 对机构进行动态仿真分析,得到关键运动部件的运动规律曲线和动力学分析曲线,结果 表明 ADAMS 对复杂机构的仿真准确可靠,得到了活塞与连杆轴线不重合导致的扰动与气缸壁间侧压 力和力矩分析曲线,零部件间冲击和扰动产生的动力学响应,为摆盘机构减震降噪的优化设计提供了 重要参数。表明了 ADAMS 对复杂机构进行仿真分析的可行性,对相关研究具有借鉴意义。
表 1 研究的稳定工况
第一组工况 第二组工况
航速 40kn 50kn
航深 50m 400m
燃烧室压强 13MPa 27MPa
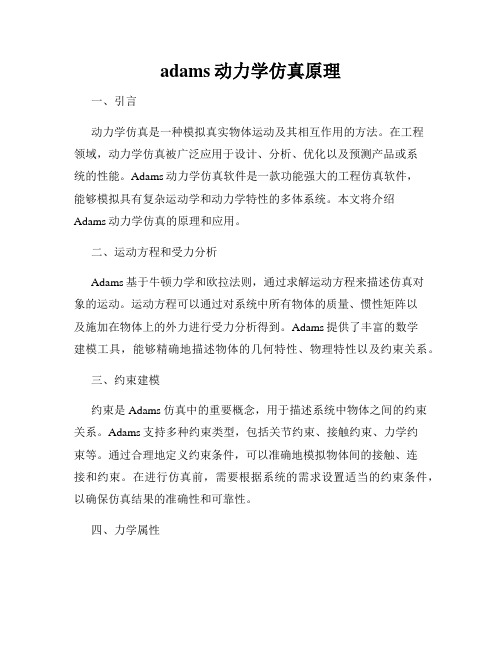
10.0
Velocliy(meter/sec)
5.0
0.0
-5.0
.liangan.CM_Velocity.X
-10.0
0.0
0.05
0.1
0.15
0.2
Time(sec)
图 2 连杆质心 x 方向速度曲线
中图分类号:TH16,TP391.7 文献标识码:A
1 引言
对 ADAMS 运动学方程求解:在 ADMAS 仿真软件中,运动
摆盘机构[1]作为一种新型发动机动力总成核心组件,适合大深 学分析研究零自由度系统位置、速度、加速度和约束反力,因此只
度大功率 UUV(水下无人航行器)使用。摆盘轴线的轨迹是圆锥面, 需求解系统约束方程:准(q,t)=0
存在运动副的连接,设运动副的约束方程数为 nh,用系统广义坐
标矢量表示的运动学约束方程为:
k
准(q)=
*准k1(q),准k2(q),…,准knh(q)*=0
(1)
又因为在考虑运动学分析时,系统具有确定运动,所以要使
系统实际自由度为零,因此对其施加等于自由度(nc-nh)的驱动
D
约束:准 (q,t)=0
q觶 k q觶 l
觶 觶 觶 觶觶 觶
坠q
觶 觶 觶 觶 觶
觶
+觶
觶觶 觶
坠 坠
坠T 坠q觶
q觶
坠 坠q
坠准 坠t
q觶
觶 觶 觶 觶觶
觶
(7)
tn 时刻约束反力的确定,可由带乘子拉格朗日方程得到:
觶 觶 觶 觶 觶 觶 觶 觶 T
坠准 坠q
λ=- d dt
坠T 坠q
T 坠T - 坠q觶
T
-Q
(8)
3 摆盘机构虚拟样机模型
0.0562
-10.0 0.075
图 4 某 2 个循环内活塞运动规律曲线
在时间 t=0s、t=0.0375s 和 0.0750s 时,活塞位于前止点。t=
0.0187s、t=0.0563s 时,活塞位于后止点,活塞完成 4 个冲程,即 2
个循环。从图中还可以看出活塞运动是典型的简谐运动。加速度
在某些位置如波峰、波谷处会有突变,这种突变容易引起机构的
|△qj =准(qj tn)
式中:△qj =qj+1 -qj —第 j次迭代。
(5)
多,难以建立完整数学模型进行理论计算,借助机械系统动力学仿
真软件 ADAMS,对摆盘机构虚拟样机模型进行运动学和动力学分
析,得到不同工况下摆盘机构的运动规律和动力学响应。
2 多刚体运动学理论
利用 ADAMS 建立机械系统仿真模型时,系统中各构件之间
4 ADAMS 动力学仿真分析
以完成了前处理的摆盘机构虚拟样机[2]模型为研究对象,在
ADAMS/View 下进行仿真分析。研究的稳定工况,如表 1 所示。以 第一组工况(航速 40kn,航深 50m,燃烧室压强 13MPa)的仿真结 果进行说明。从图 2、图 3 可以看出连杆质心在 x 方向速度呈周 期性变化,与活塞往复运动吻合,峰值速度为 6.442m/s;连杆质心 在 y、z 方向上的速度比 x 方向上小很多,但是可以从速度曲线看 出连杆质心做周期性空间复杂运动[3]。
的位移、速度、加速度曲线变化规律成三角函数规律。位移曲线幅
值约为 0.071m,即活塞的冲程。速度曲线峰值约为±6.445m/s,加
速度曲线峰值约为±1551.2m/s。
Acceleration(meter/sec**2) Velocliy(meter/sec)
Length(meter) 1500.0 0.105
关键词:摆盘机构;ADAMS;动态仿真;动力学 【Abstract】It gives a detailed introduction of the constitution and operating principle of wobble plate,and sets up its three-dimensional model.By applying the ADAMS-software for dynamics analysis of mechanism, the dynamic simulation of the wobble plate is analyzed.And the motion regulation curves and dynamics analysis curves for some key parts are obtained.The result suggests that ADAMS-based simulation analysis can bring about dynamic response between impulse and disturbance among the components,hence correct and reliable,and the disturbance caused by misalignment between piston and axis of link is ob - tained,as well as analysis curves for force within the piston and cylinder wall and the torque.The research offers significant parameters for optimizing the design of wobble plate in the aspect of shock absorption and noise reduction.It shows that ADAMS-software being applied for analysis complex mechanism is feasible and shall provide reference for similar study. Key words:Wobble plate;ADAMS;Dynamic simulation;Dynamics
0.0563 Time(s)
0.0656
0.075
图 6 1 个循环内活塞与缸壁的作用力