高压电线除冰机器人
输电线路防冰除冰机器人设计与仿真
0引言在中国南方的冬季,高压输电线路常因雨雪天气、湿度偏大及气温偏低而发生覆冰现象[1]。
严重的覆冰现象,可能导致杆塔倾斜、倒塌、断线及绝缘子闪络、供电中断等事故,使国民经济遭受打击,给民众生活带来不便[2]。
而人工除冰是在恶劣气候环境下的野外高空作业,工作强度大,危险性高[3]。
在危险工作场合,采用机器人代替人工操作提高安全性,是大势所趋[4-5]。
基于此,为减轻工作人员的劳动强度,降低企业的劳动力成本,提高安全保障和工作效率,采用机器人对高压输电线路进行防冰除冰是近年来的发展趋势[6-8]。
如湖南大学、中科院沈阳自动化研究所研制了用于输电线路除冰的系列巡检机器人[9-10],为输电线路机器人的发展提供了参考。
当前市面上的除冰机器人除冰功能强大,同时成本也较高,且主要以除冰为主。
本文提出“预防为主,防除结合”的新型防冰除冰机械器人设计理念,为设计结构简单,成本可控的高压输电线路专用防冰除冰机器人提供参考。
1总体设计1.1设计要求结合国内110V 高压线路的基本情况及障碍物的类型尺寸,综合高压线的承受载荷特点,机器人的结构设计和相关指标主要包括:①为节约能源,提高工作效率,整机重量应不超过35kg ;②工作线路为应用广泛的Φ40mm 钢铰线;③具有输电线路清除和防止覆冰功能;④具有高安全性,当遇到外界环境突变时,可立即停止工作并将高压线抱死;⑤运动平稳,具备越障能力,能平稳地跨越防震锤等障碍物。
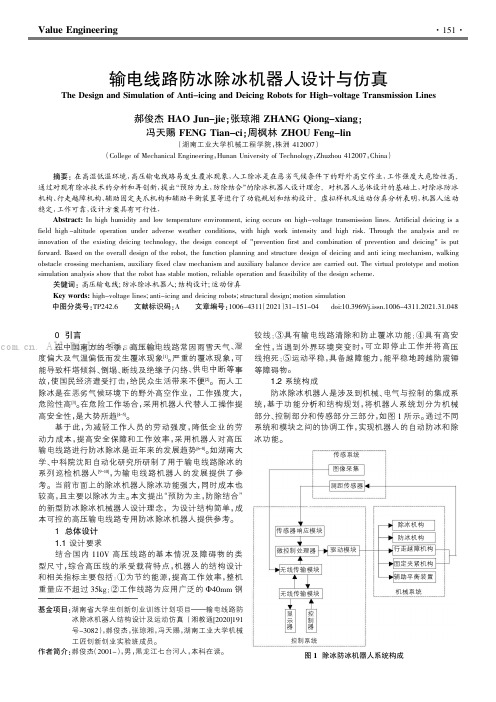
1.2系统构成防冰除冰机器人是涉及到机械、电气与控制的集成系统,基于功能分析和结构规划,将机器人系统划分为机械部分、控制部分和传感部分三部分,如图1所示。
通过不同系统和模块之间的协调工作,实现机器人的自动防冰和除冰功能。
输电线路防冰除冰机器人设计与仿真The Design and Simulation of Anti-icing and Deicing Robots for High-voltage Transmission Lines郝俊杰HAO Jun-jie ;张琼湘ZHANG Qiong-xiang ;冯天赐FENG Tian-ci ;周枫林ZHOU Feng-lin(湖南工业大学机械工程学院,株洲412007)(College of Mechanical Engineering ,Hunan University of Technology ,Zhuzhou 412007,China )摘要:在高湿低温环境,高压输电线路易发生覆冰现象,人工除冰是在恶劣气候条件下的野外高空作业,工作强度大危险性高。
高压线除冰机器人答辩

衔铁1 定位环1 蜗轮 定位环2 衔铁2
齿轮2
齿轮3
图7.主传动轴
5、越障旋转原理:衔铁2通电吸引齿轮4贴合3,
发生相对转动,在轮爪将电线扣紧后,4、3分开,齿 轮1,2啮合,继续转动,直到扣到电缆上。
槽,作为连杆的导轨。在凸轮 带动下,两块拍板在连杆带动 下对高压线进行前后错位拍打, 使电线产生弯曲,除去覆冰。 图10.除冰系统
第三部分 产品使用说明
(1)机器人充电后,由工作人员携带到达巡检现场 ,
使用升降机将机器人安装到电缆上;
(2)安装完毕后,工作人员即可向机器人发出工作 指令,机器人开始沿高压线前行,进行除冰; (3)遇到障碍物时,工作人员向机器人发出越障指 令,机器人即可跨越障碍,完成之后自行继续工作;
松完成除冰任务。机器人有带着滑轮的“手臂”,能在 高压输电线路上行走自如,遇到障碍物时能自动调整
“手臂”越过,行走时“眼观六路,耳听八方”——摄
像头可以180度旋转,自动收集线路和周边环境的数据, 检测导线损伤程度,监控电网运行情况。总之该机器人 成本较低,兼有高机动性、高安全性、高出勤率和工作 高效率四大优势。
齿轮1 电磁铁1 齿轮4 齿轮3
齿轮2 电磁铁2
图8.越障旋转系统
6、配重控制系统:机器人越障时,通过改变
配重块在滑轨上的位置来改变箱体重心的位置,保证 箱体的平衡。
小轴 传动链1 锥齿轮2
锥齿轮1
图9.配重控制系统
配重块 导轨
三、除冰系统
除冰原理:如图10所示,
除冰装置靠支架与机器人手臂
连接,凸轮表面开有弯曲的沟
输电线路除冰机器人关键技术综述
图7输电线路结构示意图
在设计控制系统时可采用如图8所示的分层控 制系统结构,即将总系统分为地面监控层(管理层)
和机器人本体控制层(规划层和执行层),分别实现
除冰机器人运动机构和除冰执行机构的伺服控制。
2011年12月
王耀南等:输电线路除冰机器人关键技术综述
33
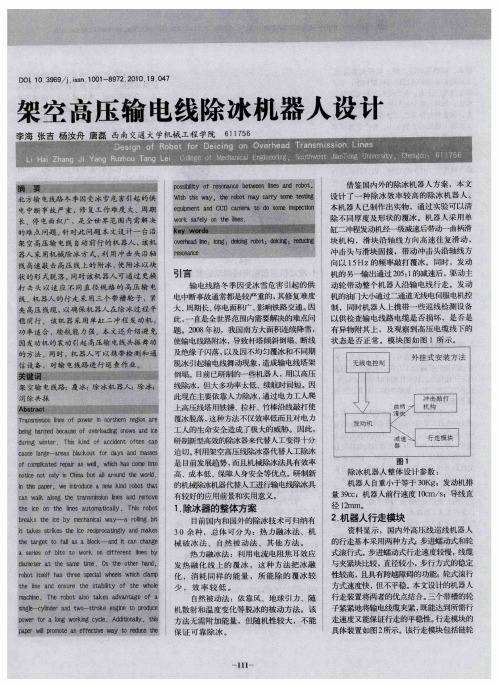
杆塔等障碍,行走环境介于结构化和非结构化环境
性的影响,需要结合变结构控制、鲁棒控制、自适 应控制、神经网络、模糊控制或视觉伺服控制等先 进控制方法ll引,研究不确定条件下除冰机器人的精
确运动伺服控制问题。 除冰机器人运行过程中需要跨越的主要障碍 物包括:绝缘子、防振锤和引流跳线(图7)。这通常
输电线除冰机器人跟一般工业机器人不同,它 悬挂在柔性输电导线上,在运行过程中机器人的姿 态时刻发生着变化,呈现出多体系三维空间的复杂
需要解决如下技术问题。 2.2.1机器人运动学和动力学建模与分析
机器人运动学和动力学特性的准确建模是实
现机器人运动控制和导航避障的前提。除冰机器人
动力学建模需要重点考虑以下问题。 (1)必须考虑机器人与柔性作业环境间的非线
性动力学耦合特性。在进行除冰机器人动力学研究 时,必须考虑柔性作业环境对除冰机器人动力学特 性的影响,即大垂度柔性输电导线与相对刚性较大 的机器人之间的刚柔耦合特性。机器人本身是一个 多刚体动力学系统,而高压输电线路相邻两塔间的 万方数据
大的局限性;随着机器人技术的发展,各种巡线机
器人已成功用于替代人工完成对输电线的巡检任
网覆冰现象严重,如何加强和改善输电线路的抗覆 冰能力,加快研究有效的线路抗冰融冰技术,最大
务,因此,采用机器人进行输电线路除冰已成为可
能。与传统除冰方法相比,采用机器人除冰具有无 人员伤亡、无须停电和转移负载等优点,无需除冰
高压线除冰机器人设计
福州大学本科毕业设计(论文)开题报告题目轻量化高速过障超高压巡线除冰机器人设计院、系机械工程及自动化专业机械设计制造及其自动化学生姓名杨祥学号*********指导教师聂晓根2013年10 月28 日国内外研究现状、发展动态;查阅的主要文献通过这个课题的研究,能通过一种机械设备,较高效率的替代工作人员预防和除去因雨雪冰冻引起的线缆冰冻灾害,减轻工作人员的负担,保障电力设施的正常运行,降低电力公司的损失,保障人民生活的正常进行。
如今一些国家也在研究线缆除冰问题,不少国家在此领域也有不少成就,线缆除冰技术关系到人们生活中的各个方面,除了电力公司设备设施,工作人员的安全外,还关系到交通运输,生活用电等。
各种除冰技术及除冰方案也有所不同,目前国内外的除冰技术有30余种,常见的就有热力融冰法、机械除冰法、自然被动法和其他方法。
热力融冰法[1]就是利用电阻焦耳效应发热来融化线缆上的覆冰,具体操作方法为当供电线缆上的冰层达到一定厚度时,先停止供电,断开供电导线与两端设备的联接,在线路的一段用临时导线将结冰的供电导线联通,而在另一端接上除冰用的临时电源和滑动变阻器调节电流的大小,使供电导线的温度保持在一定的范围内。
已有的机械除冰法也有各种各样的机构形式:文献[架空高压输电线除冰机器人设计] [2]给出了一种由曲柄滑块机构组成,滑块沿轴线方向高速往复滑动,冲击头与滑块固接,带动冲击头敲打覆冰。
其冲击头构件零件图如图1所示:图1 敲打式除冰冲击头这种机构除冰方式可以用于不同厚度形状的覆冰,但由于覆冰在低温下具有粘性,冲击头破冰后,可能在电线上粘有一层薄冰层,可能会使得破冰不够彻底,且影响除冰效率。
文献[高压输电线上除冰机器人的系统设计] [3]提出了一种压轮推进方式除冰机构,该机器人除冰刀具如图2所示:图2 压轮推进式机器人刀具示意图该设计机体上的两个固定压轮骑挂在输电线上保持机体的平衡,机体的重心位于输电线下方,另两个动力压轮分别与两个固定压轮配合,当推动动压轮时, 动压轮向上抬升, 与固定压轮配合从上下夹紧输电线, 依靠压轮与输电线的摩擦获得前进的动力,机体前部的除冰机构呈圆柱形, 分为上下两个。
架空高压输电线除冰机器人设计
块机 构 ,滑块 沿轴线 方向高速 往复滑动 , 冲击头与滑块 固接 ,带动 冲击头沿轴线 方 向以 1 Hz的频率敲打覆冰 。同时 ,发动 5
引言
输 电 线 路 冬 季 因 受冰 雪 危 害 引起 的 供 电中断事故通常都是较严重的, 其修复难度 大、 周期 长 、 电面 积 广 、 响铁 路 交通 。 停 影 因
少 ,效 率 较 低 。 自然被动法 :依靠风 、地球 引力、随 机 散射和温 度变化等 脱冰 的被动方法。该 方法无需附加 能量 ,但随机性 较大 ,不能 保证 可靠除冰 。
m ci T e rb t a o t k s a v na e o ah e n h oo l a e d a t g f a 3
热 力融 冰 法 :利 用 电 流 电 阻 焦 耳 效 应 发 热 融 化 线 上 的 覆 冰 ,这 种 方 法 把 冰 融
2机器人行走模块 .
资料显示 ,国内外高压线巡线机器人
的行走基本采用两种方式 步进蠕动式和轮
式 滚 行 式 。 进 蠕 动式 行 走速 度较 慢 , 缆 步 线 与夹 紧块 比较 , 直径 较 小 , 步行 方 式 的稳 定
化 ,消耗 同样 的 能量 ,所 能 除的 覆冰 较
t e i a d nue h s a it o t e h le n e sr te t bly f h wh { n i oe
性较高 , 且具有跨越障碍的功能;轮式滚行 方式速度快 , 但不平稳 。 本文设计的机器人 行走装置将两者的优点结合 。 三个带槽的轮 子紧紧地将输 电线缆夹紧, 既能达到所需行
p pr w rm t n e fc ̄e wa o rdc h a e m po o e a fe t y t e ue te
输电线除冰机器人越障

输电线除冰机器人越障摘要:输电线路是现代社会不可或缺的组成部分,但在冬季可能会受到积雪或结冰的影响,导致输电线路受损或工作中断。
本文设计了一种输电线除冰机器人,能够自主越过障碍物,对输电线路进行及时的清理和除冰工作。
机器人通过激光雷达进行障碍物检测,采用机械臂完成线路清理和冰层清除。
测试表明,该机器人具有较高的工作效率和精度。
关键词:输电线,除冰机器人,障碍物越过,激光雷达,机械臂。
正文:一、引言输电线路是现代社会不可或缺的重要设施,但面临着周期性积雪和结冰等问题,这不仅会影响输电线路的正常工作,还会带来很大的安全隐患和经济损失。
针对这一问题,本文设计了一种输电线除冰机器人,能够自主越过障碍物,对输电线路进行及时的清理和除冰工作。
二、机器人设计1. 硬件设计本文设计的输电线除冰机器人采用全轮驱动模式,具有优秀的越障性能。
机器人的上部安装着带有激光雷达的横梁,用于进行障碍物检测。
在机器人下部,固定着沿线工具抓取器和冰层清除器,用于完成除冰和清理工作。
此外,机器人还配置有高清摄像头,用于实时监视除冰过程。
2. 软件设计机器人控制软件主要由机器人底盘控制和机械臂控制两部分组成。
机器人底盘控制通过激光雷达进行障碍物检测,当机器人检测到障碍物时,能够自动调整运动轨迹,以完成越障工作。
机械臂控制则负责进行除冰和清理工作,机器人通过高清摄像头对工作效果进行实时监视,并将监视结果反馈给控制端进行处理。
三、实验结果本文采用模拟障碍物进行了机器人越障实验,测试结果表明,机器人具有良好的越障性能和工作效率。
同时,机器人的精度也非常高,能够准确地检测冰层厚度并进行清理工作。
四、结论本文设计的输电线除冰机器人在障碍物越过和除冰工作等方面具有较高的性能和精度,可为输电线路的安全运行提供有力的技术保障。
在今后的实际应用中,还需要加强对机器人的优化和改进,从而更好地为输电线路保障安全。
五、存在问题及展望尽管本文设计的输电线除冰机器人具有较好的性能和精度,但在实际应用中仍存在一些问题需要进一步解决。
架空输电线路除冰机器人作业导则
架空输电线路除冰机器人作业导则
架空输电线路除冰机器人作业导则
1. 准备工作:
- 确保机器人的正常运行,包括充电和功能测试。
- 确认输电线路的工作状态和任何限制,如电流负荷和电压要求。
2. 装配机器人:
- 根据机器人的操作手册和指导,正确装配机器人的除冰设备,并确保所有部件安装牢固。
3. 保护措施:
- 确保机器人操作区域的安全,如设置警示标志或栅栏,并确保没有人员或动物进入除冰作业区域。
- 如果必要,佩戴个人防护装备,如安全帽、护目镜和防护服。
4. 操作步骤:
- 在除冰机器人上设置所需的除冰参数,如温度、湿度和除冰速度。
- 将机器人放置在需要除冰的输电线路附近的安全位置,并确保机器人的稳定和平衡。
- 使用遥控器或自动化程序,启动机器人并开始除冰作业。
- 监控机器人的运行状态和除冰效果,确保机器人按预期工作。
- 根据需要调整除冰参数,以确保最佳的除冰效果。
5. 安全事项:
- 在操作机器人时保持警惕,避免碰撞或触碰高压线路,以免发生电击事故。
- 如果发现机器人出现故障或异常情况,立即停止作业并通知相关人员进行检查和修理。
- 遵守电力公司的相关安全规定和操作流程,确保作业过程安全可靠。
6. 清理工作:
- 作业完成后,及时清理除冰机器人和其它工具设备,并妥善存放。
- 及时上报作业数据和除冰效果,以便进行评估和分析,优化除冰作业策略。
这些步骤和指导将有助于架空输电线路除冰机器人的安全、高效作业。
在进行机器人除冰作业之前,务必始终优先考虑安全性,并遵循电力公司的规定和指导方针。
输电线路除冰机器人机械部分设计

输电线路除冰机器人机械部分设计随着冬季的到来,气温的逐渐降低,大型输电线路的安全运转也面临较大的挑战。
冰雪天气容易造成输电线路结冰,导致电力设施出现故障,给正常的生产生活带来诸多不便。
为了解决这一问题,研究人员提出了输电线路除冰机器人。
本文重点介绍输电线路除冰机器人的机械部分设计。
一、输电线路除冰机器人的作用传统的输电线路除冰工作主要是通过人工爬上塔杆,使用除冰器具进行除冰。
这种方式存在较高的危险性,不仅造成人手资源浪费,而且也无法保证工作效率和安全性。
输电线路除冰机器人的出现,则解决了这一问题。
除冰机器人采用自动化控制方式,能够直接上升塔杆,通过旋转刷子等方法完成除冰工作。
这不仅提高了工作效率,而且也能够保证工作人员的安全。
因此,输电线路除冰机器人成为了解决输电线路结冰问题的重要装置。
二、输电线路除冰机器人的机械部分设计输电线路除冰机器人机械部分设计的关键在于实现机器人的上升和旋转等动作。
机器人主要包括基座、动臂、机械手爪、除冰刷等部分。
接下来,将分别介绍这些部分的设计。
1. 基座基座是输电线路除冰机器人的重要组成部分,其不仅负责支撑整个机器人,同时也需要实现整个机器人的上升和下降动作。
基座设计应尽量轻巧,同时也能承受机器人自身重量。
通常采用金属制造,基座上设有马达和外壳,以便连接动臂和下一部分装置。
2. 动臂动臂是输电线路除冰机器人的另一重要组成部分,其主要任务是将机器人送到需要进行除冰的导线附近,动臂长度一般为2.5~3.5米之间。
机器人的上升和下降动作是动臂实现的,同时,动臂上也需要设定一些辅助装置,例如,温度和车速传感器,视觉设备等。
在动臂的设计中,应该考虑到动作执行精度和旋转等特殊要求。
3. 机械手爪机械手爪是输电线路除冰机器人的关键装置,其主要任务是用于搭载除冰刷和完成除冰工作。
手爪是由机器人动臂末端延伸的部分,应该能够灵活伸缩。
机械手爪设计需要注意的一个重要问题在于重量,应尽量减轻重量以提高机器人的运动性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高压电线除冰机器人
作者:刘哲成
来源:《发明与创新·中学生》2016年第02期
高压电线结冰后需要抢修与维护时,由于工作条件恶劣,人工作业存在难度大、危险性高、费用高的弊端。
本文在机械手工作原理的基础上,提出了一种高压电线除冰机器人的设计构想。
一、机械手的组成及工作原理
机械手是一种能模仿人手某些动作的器械,主要用来代替人抓取、搬运物体。
作为一种早期的机器人,它被用来代替人类做一些繁重的劳动,并能在恶劣环境下工作,因而被广泛应用。
其结构如图1所示。
img src="/qkimages/fmcs/fmcs201602/fmcs20160227-1-l.jpg" alt="" />
当右边的拉杆I顺时针旋转时,拉杆II带动滑块I向右运动,此时,上、下夹具体分别随滑块II、III向中间靠拢,这样机械手就可将物体夹起,如图2。
二、除冰机器人设计构想
以机械手工作原理为基础,我提出一种高压电线除冰机器人,其结构如图3所示。
为提高除冰效率,需在机械手的夹具体上添加细齿。
高压电线除冰机器人在线轮的转动下沿电线前进,当拉杆I顺时针转动时,通过拉杆II、滑块I、II、III的传递,机械手的夹具体将高压电线夹住,从而将高压电线上的冰块除掉,如
图4。