架空高压输电线除冰机器人设计
一种高压线除冰机器人的设计
一种高压线除冰机器人的设计设计了一款基于STC89C52单片机的高压线除冰机器人。
该机器人可通过蓝牙通讯、短信通信和自我检测完成在高压线上的行走、除冰和数据实时监测等功能。
通过实验室测试和调整,较好地实现了预期功能。
标签:机械除冰;光强检测;高压线路Abstract:A high-voltage deicing robot based on STC89C52 microcontroller is designed. The robot can perform the functions of walking,deicing and data real-time monitoring on high-voltage lines through Bluetooth communication,short message communication and self-detection. Through the laboratory test and adjustment,the expected function is well realized.Keywords:mechanical deicing;light intensity detection;high voltage line改革开放以来,我国的电力行业得到迅速发展,电网覆盖面积扩大,线路走廊穿越的地理环境更加复杂,输电线路冰灾事故更为频发。
严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线,绝缘子闪络,而且线路不均匀覆冰和不同期脱冰还会引起导线舞动现象,这些情况会引发线路跳闸、供电中断等事故,给工农业生产和人民生活造成严重影响。
目前,国内外除冰方法有30余种,根据除冰机理可分为机械除冰法与热力融冰法两类。
机械除冰方法能耗较小,但是除冰效率低,而且一般需要人工参与;热力融冰较机械除冰速度快,安全性高,但实际应用中限制因素太多,不能广泛适用。
对于较为严重的导线覆冰一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。
高压线除冰机器人本体结构设计
1 除 冰 机 器 人 的 总体 设计
机 器 人 是 一 个 复 杂 的 机 电一 体 化 系 统 。涉 及
到 机械 结构 、 自动控 制 、 通信 技 术 等多 个领 域 。 但
机 械 结 构 是 整 个 系 统 的基 础 ,也 是 制线 路上 的高
1 3 2 0 2 1 )
赫
( 北华 大 学 机 械 工程 学 院 ,吉林 吉林
摘
要 :针 对 高 压 输 电 线 路 的 覆 冰情 况 , 提 出 了一 种 线 路 除冰 机 器 人 , 该 机 器 人 由行 走 机 构 、 越 障机构 、 除 冰
工具 、 传 动 系统 和 摄 像 系 统 组成 。 机 器人 利 用 固定 在 前 端 的 除 冰 砂 轮对 覆 冰 切 割 , 而后除冰锤实现 1 8 0  ̄ 半 圆 形 往 复 运 动 对 剩余 覆 冰进 行 反 复 敲 打 清 除 ; 驱 动 轮 采 用 半 圆型 结 构 , 适 应 一 定 范 围的 线 径 , 为机 器人 提供 了稳 定
冰已成为 现实 。国外 的除冰机器人研发技术较为成 熟, 但 除冰机器人体积较为笨重 . 成本较 高[ 1 - 3 1 . 而国 内的机器 人研发 处于实验室 阶段 针对 高压输 电线 的覆 冰情 况 .本 文提 出了一
种 高效彻 底 、便捷 式 除冰机器 人 ,主要 由传动 机
构、 越 障机 构 、 除 冰机 构 、 行走 机 构 和摄像 机 构 组 成, 具有线 上 “ 行走” 功能 , 能 够在一 条高压 电线 上 自动越 障完成各 线塔 间的除 冰工作 ,还能 检测 线
2 除冰 机 器 人 的机 构 设 计
2 . 1 传 动 机 构 的 设 计
输电线路防冰除冰机器人设计与仿真
0引言在中国南方的冬季,高压输电线路常因雨雪天气、湿度偏大及气温偏低而发生覆冰现象[1]。
严重的覆冰现象,可能导致杆塔倾斜、倒塌、断线及绝缘子闪络、供电中断等事故,使国民经济遭受打击,给民众生活带来不便[2]。
而人工除冰是在恶劣气候环境下的野外高空作业,工作强度大,危险性高[3]。
在危险工作场合,采用机器人代替人工操作提高安全性,是大势所趋[4-5]。
基于此,为减轻工作人员的劳动强度,降低企业的劳动力成本,提高安全保障和工作效率,采用机器人对高压输电线路进行防冰除冰是近年来的发展趋势[6-8]。
如湖南大学、中科院沈阳自动化研究所研制了用于输电线路除冰的系列巡检机器人[9-10],为输电线路机器人的发展提供了参考。
当前市面上的除冰机器人除冰功能强大,同时成本也较高,且主要以除冰为主。
本文提出“预防为主,防除结合”的新型防冰除冰机械器人设计理念,为设计结构简单,成本可控的高压输电线路专用防冰除冰机器人提供参考。
1总体设计1.1设计要求结合国内110V 高压线路的基本情况及障碍物的类型尺寸,综合高压线的承受载荷特点,机器人的结构设计和相关指标主要包括:①为节约能源,提高工作效率,整机重量应不超过35kg ;②工作线路为应用广泛的Φ40mm 钢铰线;③具有输电线路清除和防止覆冰功能;④具有高安全性,当遇到外界环境突变时,可立即停止工作并将高压线抱死;⑤运动平稳,具备越障能力,能平稳地跨越防震锤等障碍物。
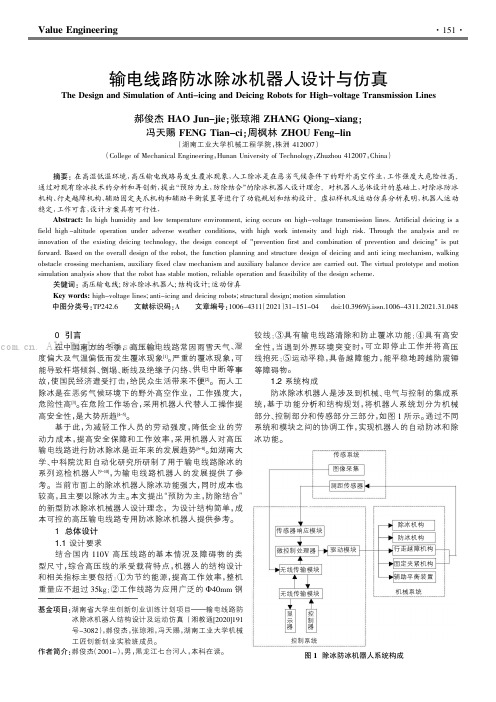
1.2系统构成防冰除冰机器人是涉及到机械、电气与控制的集成系统,基于功能分析和结构规划,将机器人系统划分为机械部分、控制部分和传感部分三部分,如图1所示。
通过不同系统和模块之间的协调工作,实现机器人的自动防冰和除冰功能。
输电线路防冰除冰机器人设计与仿真The Design and Simulation of Anti-icing and Deicing Robots for High-voltage Transmission Lines郝俊杰HAO Jun-jie ;张琼湘ZHANG Qiong-xiang ;冯天赐FENG Tian-ci ;周枫林ZHOU Feng-lin(湖南工业大学机械工程学院,株洲412007)(College of Mechanical Engineering ,Hunan University of Technology ,Zhuzhou 412007,China )摘要:在高湿低温环境,高压输电线路易发生覆冰现象,人工除冰是在恶劣气候条件下的野外高空作业,工作强度大危险性高。
供电线路除冰机器人的设计
供电线路除冰机器人的设计摘要:供电线路除冰机器人是一种集机械、电子、自控、通信等多种领域技术综合体。
本文提出了一种供电线路除冰机器人的设计方案,该机器人以STM32F4系列芯片作为主控芯片,由机械系统、传感器系统以及检测系统组成,详细论述了该除冰机器人的机械设计方案以及除冰机器人在除冰过程中的驱动、除冰、越障等一系列动作的控制方案。
该除冰机器人能在一定的环境下满足供电线路的除冰要求,在一定程度上减少供电线路人工除冰等方式带来的不利影响。
关键词:除冰机器人;供电线路;STM32;越障;除冰我国是电力大国,发电总量跃居世界第一位,电力的安全传输关系着我国社会生产力的发展水平。
高压供电线路大多数处于环境恶劣、远离人口聚居的山区或者森林等地区,尤其在我国南方地区高压供电线路易受雨雪、冰冻等极端天气影响,严重者可能引发供电线路跳闸、断线、倒杆、烧伤、通信中断等事故,影响电网的安全运营,造成社会经济损失。
因此,保证电力安全可靠传送是电力部门必须重视的课题。
我国针对供电线路结冰等情况,目前主要由人工攀爬进行敲击除冰,此种工作方式效率低,工作强度很大,且对于除冰工人来说存在巨大安全隐患。
因此有必要发展除冰机器人代替人工进行除冰作业。
本文提出了一种面向高压供电线路的除冰机器人设计方案,能自主完成在供电线路上“行走”、“越障”、“除冰”等一系列动作,高效灵活地完成除冰任务。
1、总体方案设计除冰机器人是一个机电一体化系统,涉及机械、电子、自控、通信等多领域技术,主要由机械系统、传感器系统、监测系统、主控系统等组成。
其中机械系统由电机驱动装置、行走机构、越障机构、除冰机构等机械机构组成,主要用于控制除冰机器人在除冰过程中的一系列动作过程,是除冰机器人的主要功能系统;传感器系统主要由图像采集传感器以及超声波测距传感器组成,用于机器人周边环境影像及参数的采集,传输至地面监控设备,以便于地面工作人员,对机器人周边环境进行判断,发送控制指令;主控系统由主控芯片及外围电路组成,是除冰机器人的核心部分,用于接收处理各项指令及数据,控制协调整个机器人的工作过程。
高压输电线路除冰机器人的机构设计
第30卷 第6期2008年12月三峡大学学报(自然科学版)J of China Three G orges Univ.(Natural Sciences )Vol 130No.6Dec 12008收稿日期:2008208223通讯作者:张 屹(1976-),男,副教授,博士后,主要研究方向为机电系统现代设计方法.高压输电线路除冰机器人的机构设计张 屹 邵 威 高虹亮 罗 成 杨 旸(三峡大学机械与材料学院,湖北宜昌 443002)摘要:在分析高压输电线路巡检工作的特点和国内外高压输电线路巡线机器人的发展现状和发展趋势的基础上,结合高压输电线路上覆冰的去除方法,主要介绍了设计的一种新型的高压输电线路除冰机器人.该机器人结构简单,可以在输电线上稳定地行走,能够较好地解决自主越障的问题,完成输电线上的除冰任务,具有广泛的应用前景.关键词:除冰机器人; 输电线路; 越障; 除冰中图分类号:T H112 文献标识码:A 文章编号:16722948X (2008)0620069204Mechanical Design of a Robot for Deicing T ransmission LinesZhang Y i Shao Wei Gao Hongliang L uo Cheng Yang Yang(College of Mechanical &Material Engineering ,China Three G orges U niv.,Y ichang 443002,China )Abstract A new robot for t ransmission lines deicing is designed ,based on analyzing t he characters of trans 2mission lines inspection and t he advance of t he robot for inspection of t ransmission lines at home and abroad ;and deicing combining t he met hods of t ransmission lines.The frame of t his robot is very simple.It can walk on t he t ransmission lines ,and solve t he p roblem of spanning t he barrier it self better ,and complete t he deicing task basically.The robot has a broad p rospect of application.K eyw ords deicing robot ; t ransmission lines ; spanning t he barriers ; deicing 随着我国经济的高速发展,超高压大容量输电线路越建越多,线路走廊穿越的地理环境更加复杂,如经过大面积的水库、湖泊和崇山峻岭,给线路维护带来很多困难.而且在严冬及初春季节,我国云贵高原、川陕一带及两湖地区常出现雾凇和雨凇现象,造成架空输电线路覆冰,使线路舞动、闪络、烧伤,甚至断线倒杆,使电网结构遭到破坏,安全运行受到严重威胁.在紧急情况下,寻道员用带电操作杆或其它类似的绝缘棒只能为很少的一部分覆冰线路除冰,人工除冰有很高的危险性[1].在国外,一些国家的地理与气候情况与我国相似,甚至一些国家的情况更加恶劣,为了保证电力系统的可靠性,提高高压输电线除冰的效率,减少损失,维护工人的安全,开发一种可以替代或部分替代工人进行除冰作业的新型设备一直是国内外相关研究的热点.因此,研制安全有效的除冰机械以代替人进行导线除冰具有较好的应用前景和实用意义.文章提出的除冰机器人即为一种既安全又有效的除冰装置.1 高压输电线路除冰机器人的机构介绍机器人是一个复杂的机电一体化系统,涉及到机械结构、自动控制、通信、传感器信息融合、电源技术等多个领域.但机械结构是整个系统的基础,也是目前制约机器人实用化的最大障碍.针对这种情况设计了一种新型的实用的高压输电线路除冰机器人,它具有以下一些功能:(1)能在输电线上以预想的速度进行平稳爬行;(2)具有一定的爬坡能力;(3)能够跨越输电线上的防震锤,线夹,绝缘子等障碍物;(4)能够除去输电线上的冰雪.机器人的参数如下:机器人的体积为600mm ×328mm ×526mm (长×宽×高);重量约为15kg ;平稳爬行的速度约为375m/h.机器人的机械结构主要包括平稳爬行机构、越障机构和除冰机构,其总体图如图1所示.图1 机器人的总体图1.1 平稳爬行机构的设计为了使机器人的前行速度达到最快,且前行平稳,此机器人采用行走轮式机构,如图1中的平稳爬行机构.1.2 越障机构的设计机器人的越障机构主要由行走箱机构、升降箱机构、夹紧机构和旋转机构组成.(1)行走箱机构.机器人行走箱机构行走方式的构思来自蠕虫的行走方式.其主要由左、右行走箱机构以及行走螺杆和螺母组成,如图2所示.图2 行走箱机构(2)升降箱机构[2].机器人的升降方式也采用螺杆驱动机构升降的方式.升降箱机构的主要组成为上箱机构和下箱机构以及升降螺杆和螺母组成,如图3所示.(3)夹紧机构[3].夹紧机构的夹紧夹图如图4所示,1为滑槽,升降机构上箱上的伸出轴便在其中滑动,2为轴孔,升降箱下箱机构的伸出轴便从中穿入,而轴便带动夹紧夹在升降箱上箱机构的槽中上下滑动,从而带动夹紧夹顺、逆时针旋转,3为半圆形槽,当夹紧夹到达死点位置时,便夹紧导线.夹紧夹的作用是夹紧导线,其运动方式的简图如图6和图7所示.夹紧夹的松开状态如图5所示,夹紧夹的夹紧状态如图6所示.夹紧夹将导线夹紧,便可保证机器人在越障时不会发生径向和轴向侧翻.(4)旋转机构.旋转机构采用的是一对齿轮的传动,齿轮安装在行走箱机构的行走箱内,如图7所示.1为大齿轮,以键连接的方式与2相连,2为箱座与升降机构的连接,它的作用是将升降机构和箱座连接,3为小齿轮,它靠驱动电机4驱动,4为小齿轮的驱动电机,5为螺母,6为插销,5和6的作用是托住行走箱.当小齿轮旋转时,带动大齿轮的旋转,而大齿轮则通过2带动升降箱机构与除冰机构的旋转.1.3 除冰机构的设计目前国内外已经研究出许多种除冰的方法[4],但是有许多在目前都只是提出,并没有实现.所设计的高压输电线路除冰机器人是在对巡线机器人作设计的基础上添加除冰装置,既可以巡线也可以除冰,结构比较简单,而且效率比较高.所设计的除冰机构分为两个部分,即铣刀部分与楔形块部分.先利用铣刀1从覆冰的中间铣出一条裂缝,覆冰的其它部分便会裂开,其后的楔形块4再对覆冰进行挤压,覆冰便会07三峡大学学报(自然科学版) 2008年12月被挤压掉,导线的除冰便完成.如图8所示.1.铣刀;2.联轴器;3.电机;4.楔形块;5.螺纹孔图8 除冰机构机器人跨越悬垂绝缘子等障碍物时一只手臂悬空,另一只手臂越过绝缘子,而此时障碍物另一侧导线上的覆冰未清除,轮子和铣刀处于一个平面上面,这样就会造成轮子无法在电线上落脚的情况.基于这种情况的考虑,提出了第2套除冰方案.具体示意图如图9所示,采用2个铣刀,其中铣刀中心线和导线中心线垂直,在无障碍物时和上面的除冰装置类似,铣刀电机驱动铣刀旋转除导线两侧面的覆冰,后面的楔形块在机器向前行走的推力作用下可以破碎铣刀未清除的覆冰.当遇到悬垂线夹这样的障碍物时,首先还是行走电机停机,然后启动驱动螺杆运动的电机,使电极正转,在螺杆转动下带动与螺母相连的楔形块以及前面的铣刀一起向前推进,直到将通过悬垂线夹并且将线夹前面的覆冰除掉,直到当一只手臂越障后轮子可以落到导线上面为止.当除完该段覆冰后,螺杆电机反转将刚前进的装置收回,然后再进行如上述的越障动作.图9 第2套方案除冰机构2 高压输电线路除冰机器人的运动过程此机器人采用双臂结构,这样可以满足其在行走时的稳定性,并且在双臂的配合下可以完成相应的姿态调整以完成各种障碍的跨越和除冰[5].机器人的整体机构的三维图如图10所示,由于此机器人的驱动靠的是电机的驱动,因此叙述其运动过程将以电机为线路对整体机构的运动过程作阐述.图10 整体图为了使运动过程分析起来简单,下面将采用机器人的结构简图作分析,机器人的结构简图如图11所示.由于两边机构基本对称,故下面简图只对一边作了运动方式的标注.1.行走箱螺杆驱动电机;2.行走箱螺杆;3、14.旋转机构;4、11.升降箱机构;5、12.夹紧夹;6、11.除冰机构;7、10.螺杆;8、9.行走轮.图11 整体图的简化图而若要完成基本的行走运动、相应的障碍跨越和除冰,那么机器人将要有以下基本的运动形式来互相配合完成基本的行走运动、相应的障碍跨越和除冰.(1)行走运动.双臂依靠8和9前后行走轮,可以在输电上行走,来完成除冰的任务.(2)旋转运动.升降箱机构和除冰机构的整体旋转可以依靠3和14各自的齿轮组旋转来完成.在此机器人中,只需要旋转180°即可.(3)升降运动.机器人的升降可以依靠4和13中各自的螺杆和螺母的相对运动来完成.(4)夹紧运动.夹紧运动不需要电机的驱动来完成,上面已介绍过当4和13升降机构进行升降运动时会带动夹紧夹夹紧或松开输电线.(5)移行运动.当除冰机构采用的是图9的除冰机构时,铣刀的伸出与缩回运动需要依靠7和10的螺杆与螺母的相对运动来完成.由于在输电线上存在多种障碍物,故只对其中一种典型的障碍物防震锤作跨越演示,具体步骤如下.第1步:当前臂接近防震锤时,电机1,2停止,行走轮8和9停止前进,电机5和6打开,前后臂的升17第30卷 第6期 张 屹等 高压输电线路除冰机器人的机构设计降螺杆顺时针旋转,带动升降箱下箱和行走箱一起上升,夹紧夹5顺时针旋转和夹紧夹12逆时针旋转,当俩夹紧夹夹紧输电线时,电机5和6关闭.采用第2套除冰机构,打开除冰机构的驱动电机,通过冰刀在伸出和缩回的过程中,将防震锤后方输电线上的一段冰除去,以便前臂的行走轮8安放.如图12所示.第2步:前臂的电机5打开,前臂的升降螺杆顺时针旋转,由于后臂的夹紧夹12已将输电线夹紧,前臂中固定在上箱中的螺母向上运动,螺母带动上箱和除冰机构、行走轮向上运动,此时夹紧夹5顺时针旋转,当夹紧夹夹紧输电线时,此时将电机5关闭.打开前臂旋转机构的小齿轮驱动电机7,小齿轮带动大齿轮旋转,当大齿轮逆时针旋转180°后,关闭电机7.打开行走箱行走螺杆的驱动电机9,由于后臂的夹紧夹12将输电线夹紧,故前臂便在行走螺杆和螺母的相对移动下前进,当移动到防震锤后方的不远处,关闭电机9.如图13所示.第3步:打开前臂旋转机构小齿轮驱动电机7,小齿轮带动大齿轮旋转,当大齿轮顺时针旋转180°后,关闭电机7.前臂的电机5打开,前臂的升降螺杆逆时针旋转,升降箱和除冰机构下降,当夹紧夹5将输电线夹紧时,关闭电机5,此时前臂便跃过防震锤.如图14所示.图14 前臂完全落在防震锤另一侧输电线上 第4步:后臂如同前臂过防震锤一样跨越,机器人便恢复到跨越防震锤前的情况.如图15所示.图15 双臂都越过防震锤3 结 论以上所述为高压输电线路除冰机器人机械部分的设计,该机器人为在高压线上自动智能化的作业提供了一个良好的平台,同时该机器人在未结冰季节可以将前面的除冰装置卸掉而换为巡线装置,这样就变成了巡线机器人,达到一机多用的目的.该机器人采用两手臂轮式行走结构,使结构上更为简便,控制上更容易实现,巧妙的线夹装置和仿尺蠖越障行走的方式使得该机器人的的可靠性更高.通过仿真实验表明,该机器人可以在线路上稳定的除冰,同时完全解决了直线段的自主越障问题,变路径自主越障还需要人工辅助,基本上能够较好地完成规定的除冰任务.参考文献:[1] 张运楚,梁自泽,谭 民.架空电力线路巡线机器人的研究综述[J ].机器人,2004,26(5):4672473.[2] 吴俊飞,王新智,姜生元,等.高压线检测机器人吊臂式越障机构的研制[J ].机器人技术,2006(11):35236.[3] 朱兴龙,王洪光,房立金,等.一种自主越障巡检机器人行走夹持机构[J ].机械设计,2006,23(8):11213.[4] 苑吉河,蒋兴良,易 辉,等.输电线路导线覆冰的国内外研究现状[J ].高电压技术,2004,30(1):629.[5] 耿 欣,周延泽.巡线机器人的爬行方案设计[J ].机器人技术与应用,2002(4):19221.[责任编辑 张 莉]27三峡大学学报(自然科学版) 2008年12月。
高压输电线主动防冰除冰机器人控制系统设计

㊀2021年3月第24卷第3期电力大数据大数据专题㊀Feb.2021ꎬVol.24ꎬNo.3POWERSYSTEMSANDBIGDATABigDataSpecialReports高压输电线主动防冰/除冰机器人控制系统设计庄红军1ꎬ彭赤2ꎬ陈友坤1ꎬ莫刚1ꎬ华强3ꎬ鲁彩江3(1.贵州电网有限责任公司毕节供电局ꎬ贵州毕节330006ꎻ2.贵州电网有限责任公司ꎬ贵州贵阳550002ꎻ3.西南交通大学机械工程学院机电测控系ꎬ四川成都610036)摘㊀要:针对现有除冰机器人防冰功能不足和远程操控困难的问题ꎬ本文介绍了一种110KV高压输电线主动防冰/除冰机器人ꎬ提出了一种基于马氏距离的覆冰判断模型ꎮ设计了以地面监控端和机器人本体控制系统相结合的系统总体框架ꎮ地面监控端实现了对输电线路现场复杂环境的实时监测以及对机器人本体的远程控制ꎬ机器人本体控制系统实现了关节电机的联动控制ꎮ地面监控端简洁的可视化操作界面搭配机器人本体控制系统程序逻辑ꎬ不仅提高了机器人线上自主作业的能力ꎬ也增强了地面人员对机器人的远程调控能力ꎮ试验表明ꎬ系统响应速度快ꎬ具有较高的实时性㊁可靠性以及良好的人机交互性ꎬ提出的马氏距离覆冰判断模型预测覆冰准确性较高ꎬ机器人能较好地实现防冰除冰功能ꎮ关键词:输电线路ꎻ控制ꎻ机器人ꎻ防冰ꎻ除冰ꎻ覆冰预测文章编号:2096-4633(2021)03-0034-08㊀㊀中图分类号:TM75㊀文献标志码:B㊀㊀由于输电线上的覆冰和积雪ꎬ常引起线路舞动㊁烧伤㊁跳闸㊁断线㊁倒杆[1-2]㊁绝缘子闪络和通信中断等事故ꎬ给工农业生产和人民生活造成严重影响ꎮ而我国是输电线路覆冰最为严重的国家之一ꎬ线路冰害事故发生的概率也居世界前列ꎬ同时我国传统的除冰方式效率低㊁成本高ꎮ目前除冰机器人已经成为机器人研究领域的一大热点[3]ꎮ除冰机器人代替工人在高压线上作业ꎬ通过高效的方法除去线路的冰雪ꎬ对于保护我国电网的安全运行和电力工人的生命安全具有极其重要的现实意义ꎮ近年来除冰方法和技术发展很快ꎬ防冰方法和技术对监测系统和预警精度也要求很高ꎮ在输电线路覆冰之前做出预警ꎬ及时采取防冰措施ꎬ将覆冰 扼杀 于萌芽状态ꎬ不仅能减少输电线路大面积覆冰的可能ꎬ也将大大降低覆冰对输电线路的损害ꎬ为除冰工作争取更多的时间并且降低除冰的难度ꎮ要实现准确的覆冰预警ꎬ使机器人做出快速响应ꎬ离不开一个可靠的控制系统ꎮ因此ꎬ本文针对自主研制的110KV轻量化输电线路主动防冰/除冰机器人ꎬ设计了一种实时可靠ꎬ扩展性良好的控制系统ꎮ1㊀机器人本体结构本文设计的主动防冰/除冰机器人兼具防冰和除冰的双重功能ꎬ主要由传感器㊁防冰/除冰㊁行走㊁取电和控制等模块组成ꎬ其整体实物图如图1所示ꎮ主动防冰/除冰机器人的线上移动采用轮式结构ꎬ行走轮置于输电线上ꎬ下端设置有夹紧轮ꎬ主要起夹持作用ꎬ避免机器人在起大风时被吹翻而坠落ꎬ可以保证机器人在线上稳定地行走ꎮ机器人两端有弧形开口ꎬ方便机器人上下线ꎮ开口到靠近顶端位置ꎬ以降低重心ꎬ使机器人具有更好的稳定性ꎮ自取电装置置于两轮之间ꎬ底端设计有电气仓ꎬ用于放置微控制器以及各电气元件ꎮ机器人实时监测输电线路以及周边环境状态ꎬ在输电线覆冰前ꎬ闭合两端的除水刷ꎬ包裹输电线ꎬ通过机器人在线上的来回移动即可有效除去输电线上的雨凇㊁雾凇和湿雪等ꎬ从而达到防冰的目的ꎮ在导线进入覆冰状态后ꎬ启动除冰电机ꎬ下方的冰刀开始旋转破冰ꎮ冰刀架嵌入机器人本体ꎬ可以在一定范围内上下移动ꎬ便于调整机器人在上下坡时冰刀与输电线之间的距离ꎬ防止因自重引起的线路倾斜使除冰刀距离输电线太近而损43㊀第3期庄红军ꎬ等:高压输电线主动防冰/除冰机器人控制系统设计坏输电线或距离太远而不能有效除冰ꎮ图1㊀机器人整体实物图Fig.1㊀Overallphysicalpictureoftherobot2㊀系统总体结构由于高压输电线路环境复杂[4]ꎬ为了保证机器人工作的安全性和稳定性ꎬ设计了机器人的地面监控端和机器人本体控制系统ꎬ它们之间采用4G通信ꎬ通信速度快且信息传递可靠ꎮ地面监控端属于管理决策层控制ꎬ监控端PC上装有组态软件ꎬ可以接收和储存传感器传回的各种气象参数以及图像信息ꎬ并通过算法处理后反馈给机器人本体控制系统ꎮ机器人本体控制系统是直接对电机的底层控制ꎬ以STM32F427IIH单片机为核心ꎬ根据传感器反馈信号控制各电机的联动ꎬ执行防冰㊁除冰作业ꎮ控制系统总体结构图如图2所示ꎮ图2㊀控制系统总体结构图Fig.2㊀Overallstructurediagramofthecontrolsystem3㊀控制系统硬件设计3.1㊀主控制板选择除冰机器人活动关节众多ꎬ需要多路PWM输出和I/O口控制输出ꎮ选用RoboMasterA型开发板ꎬ一款面向机器人DIY的开源主控ꎮ主控芯片为STM32F4271IH6ꎬ主频可高达180MHzꎬ静态功耗低ꎬ是一款高性能㊁高集成的工业与消费级芯片ꎮ同时拥有14个定时器ꎬ16路用户自定义PWM输出接口以及20个用户自定义I/O口ꎬ具有防反接和缓启动等多重保护ꎬ安全可靠ꎬ满足除冰机器人的功能需求ꎮ3.2㊀本体控制系统硬件结构本体控制系统由主控制板㊁供电系统㊁传感器㊁4G-RTU以及各执行元件组成ꎬ执行元件包括继电器㊁驱动器以及所有关节电机ꎮ除冰机器人设备复杂ꎬ其驱动元件数量众多ꎬ包括2个行走电机(直流无刷电机ꎬ自带刹车功能)㊁2个除冰电机(轮毂电机)㊁2个除水电机(舵机)和5个关节电机(步进电机)在内的共11个关节电机ꎬ电机在驱动器的驱动下完成关节规划动作ꎮ单片机控制相应的I/O端口控制电机的启停和正反转ꎬ电机转速由PWM波输出不同大小的占空比调节ꎮ供电系统包括24V直流电源和自取电装置ꎮ为保证机器人的持续作业ꎬ采用自取电装置对电源进行补充ꎮ自取电装置利用电磁感应原理ꎬ机器人在线上行走时切割高压线磁场生电ꎮ输电线路情况复杂ꎬ天气多变ꎬ采用此方法取电较太阳能取电更稳定ꎬ使机器人拥有了较强的续航能力ꎮ3.3㊀传感反馈部分设计自然状态下的导线覆冰形成与增长主要与气象条件及气象要素及其作用的时间累积长度有关[5]ꎮ因此ꎬ为了连续有效的监测各种气象要素以及周边导线实时画面[6]ꎬ除冰机器人上搭载了光栅ꎬ温度传感器ꎬ内外置摄像头ꎬ超声波微气象站以及电池监测装置ꎮ光栅置于机器人前ꎬ可精确测量导线覆冰厚度ꎬ以此为反馈调整机器人的行走速度和冰刀的转速ꎮ温度传感器位于机器人内部ꎬ用于测量导线温度ꎮ外置摄像头将图像信息传回监控端ꎬ地面监53电力大数据第24卷控人员可根据反馈的图像信息更加准确的控制机器人的线上作业ꎮ一般情况下通过控制继电器通断关闭它ꎬ以节约电量ꎮ内置摄像头备用ꎬ通常情况下处于休眠状态ꎮ在遇到覆冰严重ꎬ外置摄像头被冻住的情况下ꎬ控制丝杠电机转动ꎬ推开正前方小窗ꎬ下达指令唤醒即可代替外置摄像头传达图像信息ꎮ机载超声微波气象站相当于一个移动的小型气象观测站ꎬ可实时监测输电线周围的温湿度㊁风速风向㊁大气压力以及光照强度等气象参数ꎮ各传感器的相互配合ꎬ将气象参数ꎬ图片等重要环境信息通过4G-RTU传回地面监端ꎬ经过算法处理后ꎬ根据反馈信息生成指令并传达给机器人ꎬ最好的发挥机器人的线上功能ꎮ4㊀控制系统软件设计4.1㊀覆冰预测模型防冰技术需结合气象监测预警系统使用ꎬ是在导线未覆冰前采取的一种措施[7]ꎮ目前提出的防冰技术有基于电容感应式厚度传感器等监测防冰[8]㊁基于灰度图像的边缘特征提取[9]以及预防性调度传输除冰[10]等理论ꎬ但存在高耗能和可靠性等问题ꎮ为了很好地实现机器人的防冰功能ꎬ提出了基于马氏距离的覆冰预测判断模型[11]ꎮ马氏距离不受量纲的影响ꎬ两点之间的马氏距离与原始数据的测量单位无关ꎮ它考虑到了各种特性之间的联系ꎬ并且是尺度无关的ꎬ排除了变量之间的相关性干扰ꎮ其数学定义如下:X和Y是来自均值向量为μꎬ协方差矩阵为ð的总体G中的p维样本ꎬ则总体内两点间的马氏距离定义为:d2XꎬY()=X-Y()ᶄð-1X-Y()(1)定义点X到总体G的马氏距离定义为d2XꎬG()=X-μ()ᶄð-1X-μ()(2)我国南方地区多以雨㊁雾凇覆冰为主[12]ꎮ影响导线覆冰的气象因素主要有:空气温度㊁风速以及相对湿度等ꎮ根据架空输电线路的历史覆冰数据[13]和覆冰机理分析ꎬ输电线路覆冰需要同时满足如下条件:(1)气温及输电线表面温度低于0ħꎬ一般-20ħ~0ħꎻ(2)空气中相对湿度大于85%ꎻ(3)导线附近风速在1~10m/s之间ꎮ根据以上条件ꎬ可以建立输电线路覆冰定性判断的基本约束:㊀㊀㊀㊀-20ɤtairɤ0-20ɤtwireɤ0RHȡ85%1ɤvɤ10ìîíïïïïïï(3)式中ꎬtair表示大气温度ꎬ单位为摄氏度ꎬtwire表示导线表面温度ꎬ单位是摄氏度ꎬRH是相对湿度ꎬv表示导线附近风速ꎬ单位为m/sꎮ首先ꎬ我们将已有的2n个输电线路历史覆冰数据随机均分为2组ꎮ一组数据用作对输电线路覆冰数据总体G的近似估计ꎬ另一组数据用作覆冰数据样本对总体G中心马氏距离的计算ꎬ用以覆冰数据与总体中心马氏距离的统计分析ꎮ设输电线路历史覆冰数据样本数据为Xi=TiꎬHiꎬVi()ᶄꎬi=1ꎬ2ꎬ ꎬ2n(4)式中ꎬXi为输电线路第i个历史覆冰数据样本ꎻTi为第i个历史覆冰数据样本的温度值ħ()ꎻHi为第i个历史覆冰数据样本的相对湿度值ꎻVi为第i个历史覆冰数据样本的风速值m/s()ꎮ不妨取输电线路历史覆冰数据近似总体G为G=X1ꎬX2ꎬ ꎬXn{}(5)令μT=1nðni=1Ti(6)μH=1nðni=1Hi(7)μV=1nðni=1Vi(8)则近似总体G的均值向量μ为μ=μTꎬμHꎬμV()ᶄ(9)协方差矩阵ð为63㊀第3期庄红军ꎬ等:高压输电线主动防冰/除冰机器人控制系统设计ð=1n-1ðni=1Ti-μT()2ðni=1Ti-μT()Hi-μH()ðni=1Ti-μT()Vi-μV()ðni=1Hi-μH()Ti-μT()ðni=1Hi-μH()2ðni=1Hi-μH()Vi-μV()ðni=1Vi-μV()Ti-μT()ðni=1Vi-μV()Hi-μH()ðni=1Vi-μV()2éëêêêêêêùûúúúúúú(10)㊀㊀则对于任一样本点Xi=TiꎬHiꎬVi()ᶄꎬn<iɤ2nꎬ与近似总体G的中心的马氏距离dXꎬG()为dXꎬG()=㊀Xi-μ()ᶄð-1Xi-μ()(11)4.2㊀确定覆冰预测判断阈值统计由气象参数组成的输电线历史覆冰数据样本点与总体间的马氏距离ꎬ确定防冰除冰机器人覆冰判断模型的判断阈值ꎬ即当样本点与总体马氏距离小于设定值时ꎬ则认为极可能发生覆冰ꎮ因此ꎬ选取贵州电网8条输电线路的一些具有明显覆冰特征的数据作为样本ꎬ用以确定马氏距离的判断阈值ꎮ其详细参数和模型计算马氏距离如表1所示ꎮ表1㊀样本马氏距离统计表Tab.1㊀StatisticaltableofsampleMahalanobisdistance样本编号环境温度/ħ环境湿度/%环境风速/m/s覆冰厚度/mm马氏距离平方d2XꎬG()2900.76.91.38-27915.93.38-3860.34.40.86-3861.94.40.83-4930.68.91.63-3970.37.13.03-2976.813.55.7859323.54.11-6941.79.43.04-38719.30.53-1960.36.72.100930.54.50.981801.55.53.82-2840.85.71.00-4960.59.42.85-1950.37.11.67由此次样本的马氏距离平方统计表得出ꎬ覆冰数据样本与覆冰数据总体的马氏距离平方都小于6ꎮ即㊀㊀fdXꎬG()()=1ꎬd2XꎬG()<D0ꎬd2XꎬG()⩾D{式中ꎬfdXꎬG()()为覆冰定性判断函数ꎬ1为覆冰ꎬ0为不覆冰ꎻd2XꎬG()为马氏距离平方ꎮD为马氏距离的覆冰判断阈值ꎬ这里取为6ꎮ为了使除冰机器人对覆冰判断更加灵敏ꎬ以适应更为恶劣的情况ꎬ将马氏距离平方的阈值在合理范围内进行扩大ꎬ取为6.5作为覆冰预测的判断阈值ꎮ为了验证覆冰判断阈值选取的合理性ꎬ选取了一些边界数据样本进行判断测试ꎮ如表2所示ꎮ表2㊀马氏距离阈值验证表Tab.2㊀ThresholdverificationtableofMahalanobisdistance样本编号环境温度/ħ环境湿度/%环境风速/m/s实际是否覆冰马氏距离平方d2XꎬG()覆冰定性判断f(d(XꎬG))1705否20.6300801是3.1212901.5是1.1315901否4.261-5901是1.571-2720.7否9.070-2809.7否24.620-1901.3是0.051从上表可以看出ꎬ覆冰判断模型能够判断准确大部分样本的覆冰情况ꎬ具有较高的准确性ꎮ基于上述覆冰预测模型ꎬ根据覆冰判断阈值设定输电线路覆冰预警区间ꎬ监控端根据传感器反馈气象参数ꎬ设定除冰任务等级ꎬ并下达相应的防冰除冰指令ꎮ73电力大数据第24卷图3㊀主程序运行流程图Fig.3㊀Runningflowchartofmainprogram4.3㊀程序流程整个机器人的主程序由keil5编写ꎬ时钟数㊁引脚使用以及底层驱动由STM32CubeMX进行图形化配置ꎮ主程序运行流程图如3ꎬ机器人挂于线上ꎬ始终保持更新事件轮询状态ꎬ机器人本体控制系统在接收到监控端发送来的指令后ꎬ首先判断设备地址ꎬ在地址和校验码都正确的情况下开始解析报文ꎬ然后执行相关子程序ꎮ如图4所示ꎬ机器人实时监测输电线路覆冰状态ꎬ覆冰预测算法在地面监控端运行ꎮ根据传感器所传回的温度㊁湿度㊁风速等气象参数值ꎬ运用已建立的覆冰等级模型[14]ꎬ按此模型算出马氏距离后与预设阈值相比较ꎬ当传感器反馈数值的马氏距离达到防冰判断阈值时ꎬ系统会发出防冰预警[15]ꎬ并给除冰机器人发送防冰指令ꎻ当反馈值处于除冰区间时则会给机器人发送除冰指令ꎻ否则机器人继续保持轮询状态ꎮ图4㊀防冰/除冰程序触发流程图Fig.4㊀Triggerflowchartforanti-icing/deicingprogram如图5所示为机器人底层控制流程ꎮ在解码监控端指令信息后ꎬ调用防冰/除冰子程序ꎬ启动防冰/除冰电机和行走电机ꎬ往指定方向移动进行防冰作业ꎬ机器人除冰初始行走速度和冰刀旋转速度根据除冰等级而定ꎬ采用模糊PID[16-17]控制调节PWM输出占空比调节ꎮ当监测到电池需要充电的情况ꎬ则启动推杆电机ꎬ推动取电装置的左右两块半磁体闭合ꎬ进入充电模式ꎮ监测计监测到电池充满后ꎬ系统会发送指令ꎬ反向启动推杆ꎬ半磁体分开ꎬ充电完毕ꎮ83㊀第3期庄红军ꎬ等:高压输电线主动防冰/除冰机器人控制系统设计图5㊀任务级指令运行流程图Fig.5㊀Runningflowchartsoftasklevelinstructions4.4㊀监控界面设计地面监控端监控任务由组态王实现ꎬ由监测界面和控制界面组成ꎮ监测界面如图6所示ꎬ传感器传回的温湿度ꎬ大气压力等参数被直观地反映出来ꎬ以折线图的形式可以很容易看出气压㊁风向㊁雨量㊁温湿度㊁雨量等参数一段时间内的动态变化ꎬ实现了对现场环境的远程实时监控ꎮ图6㊀地面监控端监测界面Fig.6㊀Monitoringinterfaceofgroundmonitoringterminal图7所示为控制界面ꎬ界面正中为机器人模型图ꎬ点击图上对应位置按钮即可控制相应的关节电机ꎬ即可实现电机的单线程控制ꎬ通过点击下方的任务级指令栏按钮可实现电机的多机联动ꎮ电机的单线程和多机联动协调控制设计ꎬ使机器人可以同时完成多种动作而不相互冲突ꎬ提高了机器人的作业效率[18-21]ꎮ用户可以通过监控界面与机器人本体控制系统进行信息交换ꎬ随时向机器人本体发送控制指令ꎬ组态王与本体主控制板之间采用基于RS485的modbus通信协议ꎬ该协议应用于电控领域ꎬ通信可靠ꎮ用户还可通过左上角的界面菜单在监测界面和控制界面之间任意切换ꎬ操作界面简单易懂的设计体现了良好的人机交互性ꎮ图7㊀地面监控端控制界面Fig.7㊀Controlinterfaceofgroundmonitoringterminal结论本文设计的防冰/除冰机器人控制系统实现了对机器人的远程实时控制ꎮ地面监控端的设计减小了机器人本体系统的数据处理压力ꎬ增加了系统的可靠性ꎬ使机器人更好地适应复杂的输电线路作业环境ꎮ构建的覆冰预测模型ꎬ合理可靠ꎮ接下来将完善防冰/除冰预测模型ꎬ优化设定阈值ꎬ增强覆冰预测的准确性和提高机器人的智能程度ꎮ参考文献:[1]㊀殷蔚翎ꎬ黄良.基于倾角传感器及不同杆塔类型的输电线路覆冰监测研究[J].电力大数据ꎬ2020ꎬ23(01):14-20.YINWeilingꎬHUANGLiang.Researchesontransmissionlineicingmonitoringbasedonmotionanglesensorsanddifferenttypes93电力大数据第24卷ofpowertower[J].PowerSystemsandBigDataꎬ2020ꎬ23(01):14-20.[2]㊀史天如ꎬ胡丹晖ꎬ周学明ꎬ等.冰风组合下输电线路塔线结构可靠度分析[J].南方电网技术ꎬ2019ꎬ13(10):81-86.SHITianruꎬHUDanhuiꎬZHOUXuemingꎬetal.Reliabilityanalysisoftower ̄linestructureoftransmissionlineundercombinedice ̄windcondition.[J].SouthernPowerSystemTechnologyꎬ2019ꎬ13(10):81-86.[3]㊀崔彦彬ꎬ邹文珏.基于模糊小波网络的除冰机器人外观设计综合评价[J].包装工程ꎬ2018ꎬ39(20):146-151.CUIYanbinꎬZOUWenjue.Comprehensiveevaluationofdeicingrobotappearancedesignbasedonfuzzywaveletnetwork[J].PackagingEngineeringꎬ2018ꎬ39(20):146-151. [4]㊀AGARWALSꎬSWETAPADMAAꎬPANIGRAHICꎬetal.Faultanalysismethodofintegratedhighvoltagedirectcurrenttransmissionlinesforonshorewindfarm[J].JournalofModernPowerSystemsandCleanEnergyꎬ2019ꎬ7(03):621-632. [5]㊀庄文兵ꎬ祁创ꎬ王建ꎬ等.基于微气象监测的输电线路覆冰动态过程估计模型[J].电力系统保护与控制ꎬ2019ꎬ47(14):87-94.ZHUANGWenbingꎬQIChuangꎬWANGJianꎬetal.Dynamiciceprocessestimationmodeloftransmissionlinebasedonmicrometeorologicalmonitoring[J].PowerSystemProtectionandControlꎬ2019ꎬ47(14):87-94.[6]㊀JIANGJAꎬWANGJCꎬWUHSꎬetal.AnovelsensorplacementstrategyforanIoT-basedpowergridmonitoringsystem[J].IEEEInternetofThingsJournalꎬ2020ꎬ7(08):7773-7782.[7]㊀庄文兵ꎬ祁创ꎬ熊小伏ꎬ等.计及气象因素时间累积效应的输电线路覆冰预测[J].电力系统保护与控制ꎬ2019ꎬ47(17):6-13.ZHUANGWenbingꎬQIChuangꎬXIONGXiaofuꎬetal.Transmissionlineicingforecastconsideringthetimecumulativeeffectofmeteorologicalfactors[J].PowerSystemProtectionandControlꎬ2019ꎬ47(17):6-13.[8]㊀王勇ꎬ苗虹ꎬ莫思特ꎬ等.高压架空输电线路防冰㊁融冰㊁除冰技术研究综述[J].电力系统保护与控制ꎬ2020ꎬ48(18):178-187.WANFYongꎬMIAOHongꎬMOSiteꎬetal.Summaryofresearchonanti ̄iceꎬicemeltingandde ̄icingofhighvoltageoverheadtransmissionlines[J].PowerSystemProtectionandControlꎬ2020ꎬ48(18):178-187.[9]㊀唐宏伟ꎬ孙炜ꎬ张文洋ꎬ等.电力线除冰机器人基于粒子群优化的小波神经网络障碍物识别方法[J].机械工程学报ꎬ2017ꎬ53(13):55-63.TANGHongweiꎬSUNWeiꎬZHANGWenyangꎬetal.Waveletneuralnetworkmethodbasedonparticleswarmoptimizationforobstaclerecognitionofpowerlinedeicingrobot[J].JournalofMechanicalEngineeringꎬ2017ꎬ53(13):55-63.[10]JAFARISHIADEHFꎬMOHAMMADIFꎬSAHRAEI-ARDAKANIM.Preventivedispatchfortransmissionde ̄icing[J].IEEETransactionsonPowerSystemsꎬ2020ꎬ35(05):4104-4107. [11]NEZHADSHOKOUHIMMꎬMAJIDIMAꎬRASOOLZADEGANA.Softwaredefectpredictionusingover ̄samplingandfeatureextractionbasedonMahalanobisdistance[J].JournalofSupercomputingꎬ2020ꎬ76(01):602-635.[12]陈百炼ꎬ曹双和ꎬ李昊.雨雾淞导线覆冰理论模型数值模拟研究[J].电力大数据ꎬ2018ꎬ21(08):73-81.CHENBailianꎬCAOShuangheꎬLIHao.Theoreticalmodelingofconductoricingunderrimeandglazeconditions.[J].PowerSystemsandBigDataꎬ2018ꎬ21(08):73-81.[13]LUJZꎬLILꎬXUXJꎬetal.AnanalysisofthereliabilityofanewdatasetoftransmissionlineicingthicknessinsouthernChina[J].JournalofAppliedMeteorologyandClimatologyꎬ2019ꎬ58(02):413-426.[14]陈勇ꎬ李鹏ꎬ张忠军ꎬ等.基于PCA-GA-LSSVM的输电线路覆冰负荷在线预测模型[J].电力系统保护与控制ꎬ2019ꎬ47(10):110-119.CHENYongꎬLIPengꎬZHANGZhongjunꎬetal.OnlinepredictionmodelforpowertransmissionlineicingloadbasedonPCA-GA-LSSVM[J].PowerSystemProtectionandControlꎬ2019ꎬ47(10):110-119.[15]李伟ꎬ马佳ꎬ王世蓉ꎬ等.精细化气象要素下输电线路覆冰预测预警研究[J].电力大数据ꎬ2018ꎬ21(02):1-7.LIWeiꎬMAJiaꎬWANGShirongꎬetal.Researchonpredictionandwarningofoverheadlineicingunderrefinedmeteorologicalelements[J].PowerSystemsandBigDataꎬ2018ꎬ21(02):1-7. [16]ARYAY.AGCofrestructuredmulti-areamulti ̄sourcehydrothermalpowersystemsincorporatingenergystorageunitsviaoptimalfractional ̄orderfuzzyPIDcontroller[J].NeuralComputing&Applicationsꎬ2019ꎬ31(03):851-872.[17]VANM.AnenhancedrobustfaulttolerantcontrolbasedonanadaptivefuzzyPID-nonsingularfastterminalslidingmodecontrolforuncertainnonlinearsystems[J].IEEE-ASMETransactionsonMechatronicsꎬ2018ꎬ23(03):1362-1371.[18]ARYAY.AGCofrestructuredmulti-areamulti-sourcehydrothermalpowersystemsincorporatingenergystorageunitsviaoptimalfractional ̄orderfuzzyPIDcontroller[J].NeuralComputing&Applicationsꎬ04㊀第3期庄红军ꎬ等:高压输电线主动防冰/除冰机器人控制系统设计2019ꎬ31(03):851-872.[19]吴俊俊ꎬ宋刚ꎬ卢彬芳.基于粒子群优化算法的特高压输电线路覆冰不平衡张力计算[J].浙江电力ꎬ2019ꎬ38(03):59-64.WUJunjunꎬSONGGangꎬLUBinfang.CalculationofunbalancedtensionoficedUHVtransmissionlinebasedonparticleswarmoptimization[J].ZhejiangElectricPowerꎬ2019ꎬ38(03):59-64. [20]王覃梅.用于融化输电线路初期覆冰的方法[J].云南电力技术ꎬ2018ꎬ46(02):84-88.WUHongfeiꎬHANLingyunꎬLIGuobinꎬetal.ADeicingmethodappliedinearlystageoficingonpowertransmissionline[J].YunnanElectricPowerꎬ2018ꎬ46(02):84-88.[21]陈波ꎬ赵建坤ꎬ赵建利ꎬ等.架空输电线路覆冰在线监测系统的开发与应用[J].内蒙古电力技术ꎬ2018ꎬ36(04):10-14.CHENBoꎬZHAOJiankunꎬZHAOJianliꎬetal.Developmentoficingonlinemonitoringsystemforoverheadtransmissionlinesanditsapplication[J].InnerMongoliaElectricPowerꎬ2018ꎬ36(04):10-14.作者简介:㊀㊀庄红军(1988)ꎬ男ꎬ本科ꎬ工程师ꎬ主要从事输电技术㊁电力机器人等方面的工作ꎮ(本文责任编辑:范㊀斌)Designofactiveanti-icing/deicingrobotcontrolsystemforhighvoltagetransmissionlineZHUANGHongjun1ꎬPENGChi2ꎬCHENYoukun1ꎬMOGang1ꎬHUAQiang3ꎬLUCaijiang3(1.BijiePowerSupplyCorporationofGuizhouPowerGridCo.ꎬLtd.ꎬBijie330006GuizhouꎬChinaꎻ2.ElectricPowerResearchInstituteofGuizhouPowerGridCo.ꎬLtd.Guiyang550002GuizhouꎬChinaꎻ3.DepartmentofElectromechanicalMeasurementandControlꎬSchoolofMechanicalEngineeringꎬSouthwestJiaotongUniversityꎬChengdu610036SichuanꎬChina)Abstract:Inordertosolvetheproblemsofinsufficientanti-icingfunctionanddifficultremotecontrolofexistingdeicingrobotsꎬthispaperintroducesanactiveanti-icing/deicingrobotfor110kVhigh-voltagepowertransmissionlineꎬandputsforwardanicingjudgmentmodelbasedonMahalanobisdistance.Theoverallframeworkofthesystemisdesignedꎬwhichcombinesthegroundmonitoringterminalwiththerobotbodycontrolsystem.Thegroundmonitoringterminalrealizesthereal-timemonitoringofthecomplexenvironmentofthetransmissionlineandtheremotecontroloftherobotbody.Therobotbodycontrolsystemrealizesthelinkagecontrolofthejointmotor.Thesimplevisualoperationinterfaceofthegroundmonitoringterminalandtheprogramlogicoftherobotbodycontrolsystemnotonlyimprovetheabilityofonlineautonomousoperationoftherobotꎬbutalsoenhancetheabilityofthegroundpersonneltocontroltherobotremotely.Thetestresultsshowthatthesystemhashighresponsespeedꎬhighreal-timeperformanceꎬhighreliabilityandgoodman-machineinteraction.TheproposedMa̓sdistanceice-coverdeterminationmodelhasahighaccuracyinpredictingice-coverꎬandtherobotcanbetterachievetheanti-icingandde-icingfunctions.Keywords:transmissionlineꎻcontrolꎻrobotꎻdeicingꎻanti-icingꎻiceforecast14。
高压电线除冰机器人机构设计(全套图纸)
高压电线除冰机器人机构设计(全套图纸)
毕业设计-高压电线除冰机器人机构设计(全套图纸)精品文档
摘要
机械式输电线除冰技术是利用传统的工具通过机构运动方式达到输电线除冰的目的。
由于机械式输电线除冰技术除冰效率高,操作简单,因此受到很多国家的重视,在国内也引起了极高的重视,尤其是各大院校和科研院所。
本文从输电线覆冰原理及其危害综合说明了输电线覆冰对人们生产生活的影响,提出了一种新的输电线除冰解决方案。
研发一款新式输电线除冰机。
本输电线除冰机主要由4部分组成,行走部分和除冰部分。
行走部分主要通过齿轮传动机构实现,除冰部分通过对滚刀具实现除冰。
关键词:输电线除冰机械式覆冰
Mechanical transmission line de-icing technology is used tools by body movements in traditional means to achieve the purpose of transmission line icing. The mechanical transmission line de-icing deicing technology, high efficiency, easy operation. Therefore, the attention by many countries, high in the country also attracted
1。
高压线除冰机器人本体结构设计

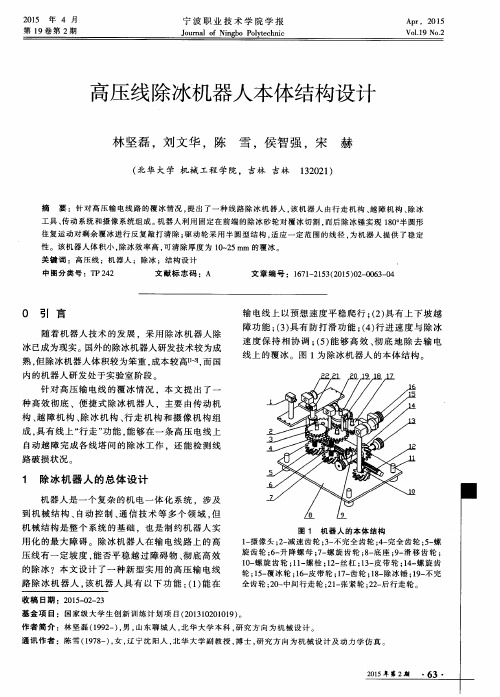
高压线除冰机器人本体结构设计作者:林坚磊刘文华陈雪侯智强宋赫来源:《宁波职业技术学院学报》2015年第02期摘要:针对高压输电线路的覆冰情况,提出了一种线路除冰机器人,该机器人由行走机构、越障机构、除冰工具、传动系统和摄像系统组成。
机器人利用固定在前端的除冰砂轮对覆冰切割,而后除冰锤实现180°半圆形往复运动对剩余覆冰进行反复敲打清除;驱动轮采用半圆型结构,适应一定范围的线径,为机器人提供了稳定性。
该机器人体积小,除冰效率高,可清除厚度为10~25 mm的覆冰。
关键词:高压线;机器人;除冰;结构设计中图分类号: TP 242 文献标志码: A 文章编号: 1671-2153(2015)02-0063-040 引言随着机器人技术的发展,采用除冰机器人除冰已成为现实。
国外的除冰机器人研发技术较为成熟,但除冰机器人体积较为笨重,成本较高[1-3],而国内的机器人研发处于实验室阶段。
针对高压输电线的覆冰情况,本文提出了一种高效彻底、便捷式除冰机器人,主要由传动机构、越障机构、除冰机构、行走机构和摄像机构组成,具有线上“行走”功能,能够在一条高压电线上自动越障完成各线塔间的除冰工作,还能检测线路破损状况。
1 除冰机器人的总体设计机器人是一个复杂的机电一体化系统,涉及到机械结构、自动控制、通信技术等多个领域,但机械结构是整个系统的基础,也是制约机器人实用化的最大障碍。
除冰机器人在输电线路上的高压线有一定坡度,能否平稳越过障碍物、彻底高效的除冰?本文设计了一种新型实用的高压输电线路除冰机器人,该机器人具有以下功能:(1)能在输电线上以预想速度平稳爬行;(2)具有上下坡越障功能;(3)具有防打滑功能;(4)行进速度与除冰速度保持相协调;(5)能够高效、彻底地除去输电线上的覆冰。
图1为除冰机器人的本体结构。
2 除冰机器人的机构设计2.1 传动机构的设计传动系统可以分为三条传动路线,如图2所示。
第一条:电机—花键轴—滑移齿轮—螺旋齿轮—皮带轮—除冰砂轮。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
热力融冰挂利用电流电阻焦耳娃应 啦热融化缱上的覆潍.这种方皓把泳融 化.消耗同样的能量.所能除的覆冰轻 ’.效率鞍低。
自髂被动珐:依靠风、地球引力随 机散射和温度变化等脱冰的被动方拄。诖 方法无需附加稚置.但陡机性较大.不能 保证日靠除冰。
《t高压输t蠛自#前行的机5人.自№.
o^采目机械聩求方式,利用冲女央§H
w∞墉w of m∞fW脚№“mn■m删r曲ot
m№w.№.咖tfwwm*Ⅻ 目m∞4暗*~t删∞cc%o∞k一∞∞珊h∞Ⅲm
“日吲h;b吼自bg岫%;d☆吼m^啪
m∞t咐
1*鍪国内外的除冰机器^方案,奉丈 设计了一种除沫&率较高的除冰机日^。 奉机器^已制作出实物.通过实验Ⅵ“清 除不同厚度肚彤状的覆冰。机%凡束月虮 缸一冲张赞动机经—圾减速后带动曲柄滑 块凯构,滑块沿轴线方向高速往复滑动. 冲击头与滑扶同接,带动冲击头ff}轴线方
交通大学机械工程学院.专业方向:机
槭设计制造及其自动化.研究方向机电一体 化.三维软件的建模仿真应用。
万方数据
一112一
架空高压输电线除冰机器人设计
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
李海, 张吉, 杨汝舟, 唐磊, Li Hai, Zhang Ji, Yang Ruzhou, Tang Lei 西南交通大学机械工程学院,611756
2006。32(4X 25—27.
【5】杨赐,高虹亮,孟遂民,罗成,
马小强.架空输电线除冰机器人的结构设
计0】.电力建设.2009,50(5):93-96
14】吴功平,戴锦春,郭应龙。等.具有自动* 越障功能的高压线巡线小车[J】.水利电力
机械.1 999(2)46-50.
黪者介绍
3。?’。。
灞
李海.男.1 9 88—0 9—2 5.单位:西南
mMm■‰hJt UⅢ№Ⅲ
h∞曲蚶wd.k啪m自№mA㈣∞^㈣删hdhl“恤tm口"m
恤m onthe■m枷删%n T№robot
㈨ n№s*8hn目by“ №bhⅢmⅫmH“m№m
甘时nⅢn∞fal∞a蚍—刊n c”d吣
a蜘of*b"愀∞airf啪,nt№by
dia_Ⅲ”a‘m qm№“m 0*r“
№P.№lf№帅∞目_“咄蝴由帅
t№№aⅢ∞mm咖0‘瑚1w oft№wr咖
腑抵T№山t alsot蛔“%mao¨a
女神~qh岍aⅢ呻一¨咖∞蛐∞wo∞∞
M惜awⅥ岫E啦M州吣.慷 Mnm*Ⅻmm~to№%
高、成奉低、保障^身安垒等优点。阱制新 的机破除水机警陀替^丁进行翰电线嚎沫具 有轻好的应用前景和实用意女。 1除冰器的整体方案
本文介绍的除冰器采用单缸二冲程发 动机,正常工作转速为3000r/min,则气 缸中活塞的振动频率为50Hz,把输电线缆 简化成两端固定的弦,计算其固有频率为 2 0 H z,气缸中活塞振动频率与之相差较 大,引起振动幅值小。为了更彻底减小振 幅,将发动机的活塞振动方向放置成与输 电线轴线平行的方向,并且在机架与发动 机连接部位加减震缓冲材料。这种方法可 以大幅度降低发动机震动引起输电线舞动的 可能性,确保机器人工作稳定可靠。
D。L 10 3*9/J%n I∞1—8972 2010 19 047
架空高压输电线除冰机器人设计
李海张吉杨浊舟唐磊’“‘l‘学{:坂j《jE 6 7驰
蔫鞠酵醅罐懑疆疆盈霹疆西蹦
m方输t鞋路}事目黄率t忘t引起竹* t十*事*F童修复1作雌且太.一期 繁.母t自自广.是仝世羊范目内需井女 "4^目怠。计对此问题本i近计一§☆
相信随着人们对导线覆冰现象研究的 逐渐深入和机器人运用技术的逐渐成熟, 高压线缆除冰机器人将有更好的发展及应用 前景。
渗筹文献o”辎!?’1净”4”+?婴矿登瀚
【1]朱兴龙,王洪光,房立金,等.一
种自主越障巡检机器人行走夹持机构[J】-
机械设计.2003,23(8):1 1—14. [210w霞舒,乃秋.关于架空输电线除冰措施 的研究【J】.高电压技术.
本文读者也读过(10条) 1. 杨暘.高虹亮.孟遂民.罗成.马小强.YANG Yang.GAO Hong-liang.MENG Sui-min.LUO Cheng.MA Xiao-qiang 架空 输电线路除冰机器人的结构设计[期刊论文]-电力建设2009,30(3) 2. 张屹.邵威.高虹亮.罗成.杨晻.Zhang Yi.Shao Wei.Gao Hongliang.Luo Cheng.Yang Yang 高压输电线路除冰机 器人的机构设计[期刊论文]-三峡大学学报(自然科学版)2008,30(6) 3. 王超.魏世民.廖启征.WANG Chao.WEI Shi-min.LIAO Qi-zheng 高压输电线上除冰机器人的系统设计[期刊论文 ]-机械工程与自动化2010(1) 4. 甘辰予.陈劲生 LEGO智能除冰机器人的设计[期刊论文]-大众科技2009(10) 5. 输电线路除冰机器人机构设计与动力学仿真[期刊论文]-机械与电子2009(10) 6. 谭磊.王耀南.沈春生.印峰.杨易曼 高压输电线在线除冰机器人的设计与研究[会议论文]-2009 7. 张海霞.孙炜.缪思怡 高压输电线除冰机器人的建模及运动控制[期刊论文]-计算机工程与应用2010,46(10) 8. 侯文琦 输电线路除冰机器人本体设计与越障动力学分析[学位论文]2009 9. 吴俊飞.王新智.姜生元.吴爽.WU Jun-fei.WANG Xin-zhi.JIANG Sheng-yuan.WU Shuang 高压线检测机器人吊臂 式越障机构的研制[期刊论文]-机械工程师2006(11) 10. 山霞.舒乃秋.SHAN Xia.SHU Naiqiu 关于架空输电线除冰措施的研究[期刊论文]-高电压技术2006,32(4)
本文链接:/Periodical_zgkjxx201019046.aspx
回敲击覆冰,使覆冰以块状的形式脱落,该
除冰方式具有以下优点:(1)可以用于不同
厚度形状的覆冰(2)只要冲击头通过的输 电线缆就能保证除冰的彻底性(3)覆冰块 状形式脱落,大大降f氐了能耗(4)能在除冰
时保护输电线缆不被破坏。由于覆冰在低温
下具有粘性,冲击头破冰后,可能在输电线 上牯有一层薄冰层,可通过主动轮和从动
轮的碾压破除,从而除冰更加彻底。
冲击头通过刚性杆与滑块相连,如图3
和起输电线舞动的解决方 法
自然条件下,输电线可能会由于风、 雨等因素引起舞动,若舞动的幅度大,会 造成输电线塔的破坏,甚至倒塌。若有一 振动源位于输电线上,其共振的频率和输 电线的固有频率相近,则会引起输电线的 共振,对输电线塔造成破坏。
同时在机器人上载有CCD摄像头,用 以采集工作情况时输电线的状态,远程发回
控制者的接收装置,为下一步的数据分析 提供必要保证,也方便于控制者对除冰机 器人的准确控制。本机器人还可以携带特 定检测模块,目前,设计载有探伤仪探测 钢芯铝绞导线或钢绞地线的内外损伤。同 时有红外热感像仪等。
6.除冰机器人的三维模型与实物制 作
按照上述的各个结构模块,应用 SolidWorks软件绘制除冰器的三维模型图。 对其进行motion分析,分析结果与计算结 果有较小误差。最后时段设计的机器人在 实验室按l:l制作,进行试验。
实验结果表明,轮式行走往复敲击式 高压线除冰机器人较好地实现设计需求, 同时在消除输电线舞动方面效果更佳。
随着输电线路电压等级越来越高,杆 塔设计高度也越来越高,线路导线覆冰现 象也越来越严重,因此对输电线路的防冰 和除冰方法的研究也显得格外重要。
5.机器人控制模块和检测模块
考虑到输电线的地域特点,除冰机器 人采用■通道无线电遥控控制。其中一个通 道控制舵机来控制油门的大小,另外一个通 道控制发动机的启动电机。油门的大小根据 线上覆冰的情况来调节,若冰厚实,则可加 大油门。若在除冰过程中,遇到突发事故一 一发动机熄火,则町通过遥控控制启动电 机,进行远程启动,继续除冰。本文介绍特 殊的控制方式使除冰机器人轻便灵活,适应 性强。
除冰机器^链体设¨参数:
机#^自雨小}等干30Kg}牲动㈣}
最3%c-机器^前行速度toc=|n/s,导线直 nlh瑚。
2机器人行走撰块
资科疆示.目内外高压线越线凯器人 的行垃幕本采用两种方如步i&蟮动式和轮 式滚行式。步进蠕动式行走速度辜空1曼,线绳 与央鞯块比陵.直径较小,步行方式的稳定 性鞍高.且具有跨越障碍的功能;轮式浓行 方式速鹰快.怛币平稳。奉文设“的机器^ 行走装鞋将陌者的优点结台。j个带精的耗 }鬟甏吐将输电线蟪兜紧.%能达到所需行
设计的机器人采用特制冲击头固接于曲柄滑
块机构的滑块上,以15Hz的频率反复敲击
覆冰。冲击头360。环形包围着输电线缆且 留有间隙保证了除冰干净彻底,同时又避
免在除冰过程中损坏电缆。此外,冲击头
设计为剖分式,安装方便。冲击头与覆冰之
间的撞击产生的后坐力通过主动轮与从动轮 之间的夹紧产生的摩擦力来平衡。冲击头来
图2 1.链轮2.主动轮1
5.链条 4.机
架 5.主动轮2 6.高压线7.重劝轮8.
丝杆 g.重动轮支座
3.除冰模块的设计 ’
结合已有的除冰方法,本文提出一种 更加节能的机械除冰方式,其最大的创新
点在于使覆冰以较大体积的块状方式脱落,
较热力除冰节约大量的能量,是真正的高
效节能除冰。 充分利用冰硬而脆的物理特性,本文
本文介绍来的高压线缆除冰机器人是 一个机电系统,在满足机械动作和机械强 度前提下,采取多种措施使系统的结构紧 凑;针对不同厚度的覆冰的除冰要求,且 有高效节能的特点。本除冰机器人还可以 将除冰模块拆下,变为寻仙机器人,获得 一机两用的效果。同时更换所携带的检测 装备,以达到不同的检测目的。值得高兴 的是本文介绍的机器人已获得全国大学生机 械设计大赛四川省二等奖。