基于VoronoiCells插值的三维海底地形图生成方法
三维Voronoi图的动态实现与研究
三维Voronoi图的动态实现与研究曹锐创石奇偲黄棱潇摘要在计算几何中,离散点构造Voronoi图是一个非常基础且应用广泛的问题。
N个离散点按照最邻近原则划分区域,每个点与它的最近邻区域相关联。
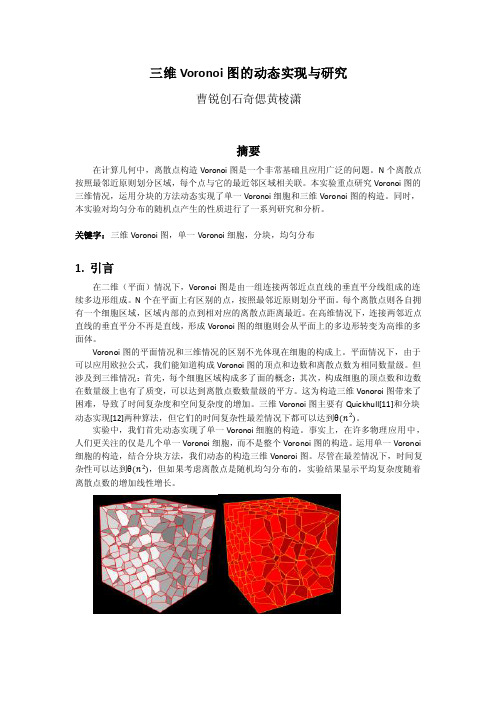
本实验重点研究Voronoi图的三维情况,运用分块的方法动态实现了单一Voronoi细胞和三维Voronoi图的构造。
同时,本实验对均匀分布的随机点产生的性质进行了一系列研究和分析。
关键字:三维Voronoi图,单一Voronoi细胞,分块,均匀分布1.引言在二维(平面)情况下,Voronoi图是由一组连接两邻近点直线的垂直平分线组成的连续多边形组成。
N个在平面上有区别的点,按照最邻近原则划分平面。
每个离散点则各自拥有一个细胞区域,区域内部的点到相对应的离散点距离最近。
在高维情况下,连接两邻近点直线的垂直平分不再是直线,形成Voronoi图的细胞则会从平面上的多边形转变为高维的多面体。
Voronoi图的平面情况和三维情况的区别不光体现在细胞的构成上。
平面情况下,由于可以应用欧拉公式,我们能知道构成Voronoi图的顶点和边数和离散点数为相同数量级。
但涉及到三维情况:首先,每个细胞区域构成多了面的概念;其次,构成细胞的顶点数和边数在数量级上也有了质变,可以达到离散点数数量级的平方。
这为构造三维Vonoroi图带来了困难,导致了时间复杂度和空间复杂度的增加。
三维Voronoi图主要有Quickhull[11]和分块动态实现[12]两种算法,但它们的时间复杂性最差情况下都可以达到θ(n2)。
实验中,我们首先动态实现了单一Voronoi细胞的构造。
事实上,在许多物理应用中,人们更关注的仅是几个单一Voronoi细胞,而不是整个Voronoi图的构造。
运用单一Voronoi 细胞的构造,结合分块方法,我们动态的构造三维Vonoroi图。
尽管在最差情况下,时间复杂性可以达到θ(n2),但如果考虑离散点是随机均匀分布的,实验结果显示平均复杂度随着离散点数的增加线性增长。
海底地形测量图的插值模型海底地形

海底地形测量图的插值模型海底地形海底地形测量图的插值模型摘要:随着全球经济一体化和信息技术的发展,企业之间的合作日益继续加强,跨地区甚至跨国合作制造的日益明显。
国际上越来越多的制造企业不断地将大量常规业务“外包”(outsourcing)出去给发展中国家,而若果保留最为核心的业务(如市场、关键系统设计和软硬件、总装配以及销售)。
在这些密切合作生产的过程中,大量的物资和信息在更为广阔的地域间转移、储存和交换,国际物流活动将日益频繁,港口作为国际物流活动主要包括的载体,在国际贸易与国际经济业务合作项目合作中愈来愈发挥着极其重要的作用。
但是海底的地形是十分复杂的,它不仅分布有巍峨的海底山脉、平缓的海底平原,而且还有许多陡峭的海底万兴庄。
为并使轮船进出港口安全,就需要了解港口航道的海底地形。
所以我们就要对海底地形有一定的了解,预测出哪些区域是船只船只的王汝贤点,避免船只在危险区域搁浅。
为了研究此问题,我们利用低潮时测得14组数据,并进行了6个基本假设,在此基础上曲面便利用插入与拟合的思想来利用光滑我们来模拟海底曲面。
但考虑到保凸性及光滑性的要求,我们采用双三次样条函数来模拟海底曲面。
首先利用测量的14个随机点的深度,以随机点的坐标将待测矩形划分成1414的网格。
然后我们通过某种加权平均来逼近未知网格接点远距离上的深度,采用距离的倒数作权重反映是定值出距离越小影响越大。
求出所有14×14个网格点上的多维度后,调用IMST中的双三次样条子程序,通过插值得到海底曲面,然后再加细网格,划分成50×50的网格,计算这加细网格接点上所的深度;最后找出两个危险三个区域分别在深度为4Ft的两个点的周围,并借助于Matlab中的绘图程序,绘出海底的二维、三维网格图及等高线图。
以不同的颜色将水深小于船只的吃水深度出来,作为军舰的避免进入区域,多于并作出水深小于船只吃水深度的海域范围,并绘出等高线。
在找几个近似大小的海底拓扑地图,每个随即取14个数据点,把我们的模型广泛应用上去,通过比较实际地图及由模型画出地图比较接近。
基于Voronoi Cells的自然邻点插值法在地形可视化中的应用

专业知识才能正确判读它所表达 的信息 。随着现 代 社会 经济 的飞速 发展 , 特别是 信 息化 时代 的到来 , 越来越多的领域对地理信息的需求 . 特别是对其可 视 化 的要 求 也越 来 越高 , 因而 地形 可 视 化具 有 广泛
的应用前 景 ] 。
的D l ny r n l 的数据结构和算法 本文采用 e u a i g s a ta e 基于 V r ni el oo o cl s的数据结构 , 给出了一种在二维不 规 则 区域 中生成 Voo o cl 及 D lu a r n l rni el s ea nyti ge a s
地 形 可 视 化 ( eri sai t n 是 地 理 信 T ranVi lai ) u z o
函数值与 已知高程值有最佳 程度的拟 合; 最后就可
以按要 求得 到该平 面域 内任意 位置 的 高程值 。这 实 际上是 一 个插值 的过 程 。 若选 择函 数H 的定义域包 含所 有原 始 点 , 称为 全局 插 值 ; 之 . 取 某 一局 则 反 若
维普资讯
珥 钯 ● 究
适戚 信惠
基 于 Voo o C l 的 自然邻 点 插值 法 rn i el s 在 地形 可 视 化 中 的应 用
谢 经 平 0, 朱怀 球 0, 吴泰 然0, 潘懋0
( ①北 京大学地质 系信息系统实验 室 , 京 10 7 } 北 0 8 1 ②北京大学 力学 与工程科学 系, 京 10 7 ) 北 0 8 1
1 5
建 舢 l . 赫 _ 1
维普资讯
地形可视化就是将地理空间数据用各种可视化
技 术 或工具 表 现 出来 , 抽象 的地理 数 据 变 成具 体 使 的有真 实感 和 立体 感 的图形 ( 可 结合 图 像) 也 显
基于分形插值的三维海底地图生成算法_张涛

第16卷第2期中国惯性技术学报V ol.16 No.2 2008年4月 Journal of Chinese Inertial Technology Apr. 2008文章编号:1005-6734(2008)02-0171-03基于分形插值的三维海底地图生成算法张涛,徐晓苏,王其,李佩娟(东南大学 仪器科学与工程学院,南京 210096)摘要:三维海底数字地图的制作是海底地形匹配技术的基础。
分形插值算法利用了海底地貌的自相似特性,通过参数垂直比例因子来描述地形的复杂度和起伏程度,以此特征来实现对地形的分类。
本文在分形理论的基础上提出了利用随机中点位移法进行水深数据插值生成规则网格数字高程模型的算法,可以区别不同种类地形对地形辅助导航的影响,为海底地形匹配技术的研究提供了重要的理论意义和实用价值。
关 键 词:水下潜器;地形匹配;分形插值;垂直比例因子中图分类号:U666.1 文献标志码:AGenerating algorithm of 3D submarine digital cartographbased upon fractal interpolationZHANG Tao, XU Xiao-su, WANG Qi, LI Pei-juan(Department of Instrument Science & Engineering, Southeast University, Nanjing 210096, China)Abstract: The making of three-dimensional sea-bottom terrain digital map is the basement of sea-bottom terrain matching technology. Fractal interpolation algorithm, based on self-similar character of sea-floor features, presents the complexity and fluctuation by using the parameter quality scale coefficient, and classifies the terrain by this character.Based on the above theory, a random midpoint displacement algorithm was put forward which simulates the digital elevation model by using depth datum of electronic chart and can distinguish the influence of different kinds of terrain on the terrain-aided navigation. So it provides important theoretical basis and practical values for the research of sea-bottom terrain matching technology.Key words: underwater vehicle; terrain mapping; fractal interpolation; quality scale coefficient21世纪的水下潜器将成为人类探索海洋和开发海洋的重要工具,它在民用和军用方面起着重要作用,所以水下潜器的应用环境对其导航精度提出了越来越高的要求。
基于Unity3D的三维海底地形建模

基于Unity3D的三维海底地形建模马龚丽1,杨敏2,支雄飞1,3, 周鹏1,马修水11浙江大学宁波理工学院3安徽大学2国家海洋局北海海洋技术保障中心【摘要】本文运用虚拟现实技术,以Unity3D为建模工具,介绍了三维海底地形地貌建模的建模步骤以及最终的建模效果,实现了三维海底地形地貌建模,为三维可视化海底管道集成系统的建立创造条件。
【关键词】海底地形;输油管;风险评估;三维模型;Un ity3D0引言海底管道是海洋油气开发的重要设施,近年来全球海底管道泄漏事件时有发生,造成了巨大的经济损失与生态环保破坏,世界各国对于海底管道的检测和风险评估日益重视。
海底管道三维动态信息系统集成,旨在建立适合集成数据支持体系和基于该体系的网络三维可视化集成系统。
郝燕铃和路辉提出了基于OpenGL的具有真实感的三维海底地形显示的方法⑴。
申浩、田峰敏和赵玉新提出了一种利用电子海图已有的水深数据生成三维数字高程模型的方法⑵。
邱秋香提出了将IFS分形插值曲面算法应用于海底离散的水深高程数据插值过程,在Creator建模工具中使用Delaunay转换算法生成三维海底地形模型[3]。
作为一个三维虚拟现实的开发平台,Unity3D具有兼容操作系统可跨平台发布并部署、开发效率高、人机交互功能强大、三维效果逼真、内置网络功能的特点,被广泛地运用于游戏开发和虚拟现实。
Unity3D支持所有主要文件格式的资源,并能和大部分相关应用程序协同工作,其内置的地形引擎可以实现广阔复杂的地形场景在低端硬件上流畅运行。
本文以Unity3D为建模工具,结合Photoshop图像处理技术,构建一个基于Unity3D的三维海底地形地貌模型。
模型具有真实的三维立体感,以虚拟海底环境为目标,用于作为三维可视化海底管道集成系统建立的基础。
1总体地形建模方案本文建模的总体方案是通过Unity3D地形引擎创建一个基础地形模型,在这个基础地形上添加各种场景效果,实现各种功能,最终形成一个三维海底地形地貌的模型。
基于空间改进型Voronoi图的路径规划研究.pdf

理!我们以过三点的一个凸曲面作为可规划的路
径集合!因为在此曲面上点的风险系数相对较小B 同理 ! 若 以 ? 作 为 顶 点 ! 我 们 可 以 选 择 过:!#!( 三点的一个凸曲面作为可规划的路径集合B若以 5 作 为 顶 点 ! 我 们 可 以 选 择 过 *!#!6 三 点 的 一 个凸曲面作为可规划的路径集合B若以 M 作为顶 点 ! 我 们 可 以 选 择 过(!6!h 三 点 的 一 个 凸 曲 面 作为可规划的路径集合B而四个凸曲面围成的区 域 我 们 称 为 ,安 全 区 域 -! 若 XMb 在 这 个 区 域 内 飞 行 ! 则 ?!=!5!M 任 一 点 对 其 的 威 胁 性 相 对 较小B
"$$对 于 每 组 的 K 个 威 胁 点 X!!X$!X( 和 XK! 如 果K 个 相 同 威 胁 点 组 成 一 组 ! 确 定% 个 初 始 路 径 点 ! 如 图 ("1$所 示 B 其 中 /!9!R!! 为 各 三 角 形 的 外 心 !3 为 四 面 体 ?8=5M 的 外 接 球球心B若威胁等级不全相同!同样确定相应的 % 个 初 始 路 径 点 /!9!R !! 和 3! 如 图 ("F$ 所 示 B 其 中 点 /!9!R!! 分 别 为 各 边 上 根 据 相应顶点的威胁等级分割所在边的点所组成的内
图+!具有@ 类不同威胁点的空间区域初始路径图 "1$?!=!5!M 的 ER 相 同!3 为 四 面 体 ?8=5M 外 接 球 球 心! /!9!R!! 为各三角形 外 心!3/@ ??=5)39@ ?=5M)3! @??=M)3R@??5M)"F$?!=!5!M 的 ER 不 全 相 同!3 为内接倒立四面体98/R! 内接球球心!/!9!R!! 为各面上
基于OpenGL的海底地形三维渲染方法

基于OpenGL的海底地形三维渲染方法马丹;阳凡林;崔晓东;田会波【摘要】在海底地形的三维可视化表达中,三维颜色渐变渲染方法能够直观、方便地表达海底地形的起伏变化.本文分析比较了颜色模型与光照模型,提出基于HSL颜色模型的海底地形多色渐变渲染与配色方法,基于OpenGL进行了真实感光照模型的设置,并分析了影响光照效果的相关因素,最终实现了以海底数字高程模型为数据基础并叠加颜色及光照渲染真实感三维海底场景的建立.文中基于MFC平台进行了程序实现,并与常见海底地形成图软件的渲染效果进行了比较,对比结果证明本文所提出的渲染方法地形显示准确,渲染效果美观.【期刊名称】《山东科技大学学报(自然科学版)》【年(卷),期】2018(037)002【总页数】8页(P99-106)【关键词】地形可视化;地形渲染;光照计算;HSL颜色模型;OpenGL (Open Graphics Library)【作者】马丹;阳凡林;崔晓东;田会波【作者单位】山东科技大学测绘科学与工程学院,山东青岛266590;山东科技大学测绘科学与工程学院,山东青岛266590;海岛(礁)测绘技术国家测绘地理信息局重点实验室,山东青岛266590;山东科技大学测绘科学与工程学院,山东青岛266590;山东科技大学测绘科学与工程学院,山东青岛266590【正文语种】中文【中图分类】P229;TP391多波束测深系统在水深测量中应用广泛[1-3],如何利用多波束数据实现海底地形的可视化越来越受到关注。
自20世纪40年代以来,随着计算机技术的出现和蓬勃发展,以及计算机图形学、计算机辅助制图、现代数学理论等的完善和应用,各种数字地形的表达方式与可视化技术得到迅速发展。
地形可视化技术经历了从简单到复杂、从低级符号化到高级符号化、从抽象到逼真的过程,其表达方法也从二维可视化向三维可视化转变[4-5]。
在可视化方法中,等高线法能较为科学地反映地形的高程、坡度坡向、山脊山谷等基本形态及其变化,但是缺乏视觉立体感,无法表达等高线之间的微小地貌;分层设色在等高线地形图的基础上绘制,用不同的色调和色相只能概略表达地势起伏状况,且某些要素符号的颜色易受干扰;明暗等高线法、半色调符号表达法等只能在普通二维地形图中表达出相对的地势起伏,上述方法均难以直观、方便地反映海底地形的真实变化。
基于Unity3D的三维海底地形建模

【摘要】本文运用虚拟现实技术,以Unity3D为建模工具,介绍了三维海底地形地貌建模的建模步骤以及最终的建模效果,实现了三维海底地形地貌建模,为三维可视化海底管道集成系统的建立创造条件。
【关键词】海底地形;输油管;风险评估;三维模型;Unity3D0 引言海底管道是海洋油气开发的重要设施,近年来全球海底管道泄漏事件时有发生,造成了巨大的经济损失与生态环保破坏,世界各国对于海底管道的检测和风险评估日益重视。
海底管道三维动态信息系统集成,旨在建立适合集成数据支持体系和基于该体系的网络三维可视化集成系统。
郝燕铃和路辉提出了基于OpenGL的具有真实感的三维海底地形显示的方法[1]。
申浩、田峰敏和赵玉新提出了一种利用电子海图已有的水深数据生成三维数字高程模型的方法[2]。
邱秋香提出了将IFS分形插值曲面算法应用于海底离散的水深高程数据插值过程,在Creator建模工具中使用Delaunay转换算法生成三维海底地形模型[3]。
作为一个三维虚拟现实的开发平台,Unity3D具有兼容操作系统可跨平台发布并部署、开发效率高、人机交互功能强大、三维效果逼真、内置网络功能的特点,被广泛地运用于游戏开发和虚拟现实。
Unity3D支持所有主要文件格式的资源,并能和大部分相关应用程序协同工作,其内置的地形引擎可以实现广阔复杂的地形场景在低端硬件上流畅运行。
本文以Unity3D为建模工具,结合Photoshop图像处理技术,构建一个基于Unity3D的三维海底地形地貌模型。
模型具有真实的三维立体感,以虚拟海底环境为目标,用于作为三维可视化海底管道集成系统建立的基础。
1 总体地形建模方案本文建模的总体方案是通过Unity3D地形引擎创建一个基础地形模型,在这个基础地形上添加各种场景效果,实现各种功能,最终形成一个三维海底地形地貌的模型。
建模大的具体流程如图1所示。
图1 三维海底地形地貌建模流程图2 基础地形建模打开Unity3D创建一个新的Project,将建模所需的所有资源导入新建的Project中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系 统 仿 真 学 报© Journal of System Simulation
Vol. 18 Suppl.2 Aug., 2006
基于 VoronoiCells 插值的三维海底地形图生成方法
申 浩 1,田峰敏 2,赵玉新 2,3
(1.中国人民解放军 91336 部队, 秦皇岛 066326; 2.哈尔滨工程大学自动化学院, 哈尔滨 150001; 3.哈尔滨工业大学航天学院, 哈尔滨 150001)
·444·
第 18 卷增刊 2 2006 年 8 月
Vol. 18 Suppl.2
申
浩, 等: 基于 VoronoiCells 插值的三维海底地形图生成方法
Aug., 2的 DEM 生成方法
DEM 的数据结构一般是规则网(Grid)和不规则三角网
来实现插值。要对 ℜ n 中的任意一点 X 进行估计,须先确定 构 X 的自然邻接点: 选择区域 Ω 作为待估点的初始影响域, 再根据约束域中自然邻接 建 Ω 内全体离散点的 Voronoi 图, 点的定义确定待估点 X 的自然邻接点集{Pi},接着构造插值 形函数(shape function) φ i ( X , Pi ) ,则点 X 属性值的估计值: u h ( X ) = ∑ [φi ( X , Pi )u ( Pi )] ( ∑ φ i = 1 ,φi ≥ 0 )
Z i× j
⎡ z 00 ⎢ ⎢ z 01 = ⎢L ⎢ ⎢L ⎢z ⎣ 0j
z10 z11 L L z1 j
L L L L L L L L L L
zi0 ⎤ ⎥ z i1 ⎥ L⎥ ⎥ L⎥ z ij ⎥ ⎦
几何意义上,V(Pi, Pj)表示那些以 Pi 为最近点,Pj 为第二近 (1) 点的点的集合。 V ( Pi ) = 如 果
[1]
设施、水深、港口设施、海流和潮汐等。水深数据是电子海 图的第 10 层要素[2]。将海图中的水深数据提取出来并转化 成需要的格式,具体实现步骤如下: 1) 读出海图的文件头结构体: 每一个电子海图的文件头结构体包括该海图的所有索 引信息,比如图号、图名、投影方式、控制点坐标、分层文 件起始序号、要素数等。当处理某一张电子海图时,首先将 其文件头结构体信息保存到设计好的结构体中。 2) 提取海图中的水深数据: 本步的主要任务是提取需要的水深数据和相应的海图 坐标信息。根据上一步的结构体中包括分层文件起始序号、 要素数等,读取第 27 层的水深数据,其文件位置从起始序 号开始,总共读取的个数由要素数决定。读出的数据包括水 深点的海图坐标(单位:0.01cm)和该点的水深值(单位:m)。 3) 将坐标数据和水深数据存放在指定的文件,在后面 处理数据时用到。 上面得到的水深数据是离散的采样点, 没有固定分布规 律,属于散乱数据范畴,为了对地形特征进行空间描述就需 要建立 DEM 表面。
N
N
(2)
其中 N 是 X 自然邻接点的个数, φi ( X , Pi ) 是与 X 的第 i 个 uh( X )是对节点 X 属性值 自然邻接点 Pi 相关的插值形函数, 的估计值, u(Pi)是节点 Pi 的属性值, φi ( X , Pi ) 的求法在下 面给出。 2.2.1 Sibson 插值(二阶 Voronoi 插值)
j , j ≠1
UV ( Pi , Pj ) , V ( Pi , Pj ) 可能是空集。
, 那 么 由
κV ( Pi , Pj ) < +∞
= κV ( Pi ) ⋅ x i
∑ κV ( Pi , Pj ) ⋅ x j
⇒ φ ij
=
z00 对应的坐标为最小经度和最小纬度, zij 对应的坐标为最大 经度和最大纬度。
摘 要:水下地形匹配技术是近年来导航技术领域研究的新方向,三维海底数字地形图的制作是海 底地形匹配技术的基础。提出一种利用电子海图已有的水深数据生成三维数字高程模型(Digital Elevation Model,DEM)的方法:首先提取电子海图的水深数据,接着通过基于 Voronoi 多边形的 插值算法计算 DEM 网格节点的高程值,生成规则的 DEM 网格,最后对生成 DEM 的三维显示进 行了仿真,仿真结果证明该方法是可行的,为海底地形匹配技术的研究提供了前提。 关键词:水下地形匹配;三维数字海底地形图;数字高程模型;Voronoi 多边形 中图分类号:U666.1 文献标识码:A 文章编号:1004-731X (2006) S2-0444-03
。电子海图是公开发行的,包括较为翔实的水深数据,所 本文提出了一种利用二维电子海图水深数据生成三维
以利用电子海图上的水深数据绘制三维海图具有实际意义。 海底地形图的方法,主要分三个方面:1) 从电子海图数据 文件中提取水深数据;2) 对这些数据处理,生成数字高程 模型 DEM 形式的文件;3) 数字高程模型的三维显示。
几何意义上, V(Pi)表示到 Pi 比到其它节点近的点的集合。 它的二阶 Voronoi 图定义为:
n ⎧ ⎪x ∈ ℜ | d ( x, Pi ) < d ( x, Pj ) < d ( x, Pk ),⎫ ⎪ V (Pi , Pj ) = ⎨ ⎬ ⎪ ⎪ ∀ k ≠ i k ≠ j i ≠ j , , ⎩ ⎭
Abstract: Underwater terrain-matching technology is a new direction of navigation technology. The making of three-dimensional sea-bottom terrain digital map is the basement of sea-bottom terrain matching technology. A method of how to construct the Digital Elevation Model (DEM) was put forward on the base of depth datum in electronic navigation charts (ENC): Firstly, the depth datum was picked up from ENC data base. Secondly, the depth of crossing node in Grid DEM with an interpolation algorithm was calculated based on VoronoiCells, and then a Grid DEM was generated. At last, the digital simulation about DEM was carried out. The simulation results demonstrate that the method is effective, and it provides a precondition of the sea-bottom terrain matching technology research. Key words: underwater terrain matching; three-dimensional sea-bottom terrain digital map; DEM; VoronoiCells
Sibson 插值由 Sibson[5]于 1980 年提出,算法模型如下:
设 Ω ( P ) ⊂ ℜ n 是 ℜ n 空间中的一个区域,{P}是离散点 集,它的一阶 Voronoi 图定义为:
n V (P i ) = {x ∈ℜ | d ( x, P i ) < d ( x, Pj ), ∀j ≠ i}
i =1
i =1
2.1 数字高程模型 DEM 的建立
(TIN)。规则网格模型中高程数据排列规则,存储结构简单, 利于计算机分析处理,具有较好的实时性,可以方便的完成 检索和插值计算,但存在数据冗余;不规则的三角网(TIN) 具有良好的拓扑结构,使用较少的点可以获得较高的精度, 但构建费时,算法设计比较复杂。目前陆上高程数据采样一 般通过地形图数字化、摄影测量、实地测量、合成孔径雷达 干涉测量和机载激光扫描的方式获得[3];水下高程数据一般 是航道部门通过声纳设备测量获得。 由于这些采样数据没有 固定的分布规律,如果直接用来绘制三维地图,就需要在整 个数据空间构建 TIN 网格, 这要花掉很多时间。 如果定步长 绘上直线,生成格网,然后利用事先已生成了规则的 Grid 格网数据,节点间的连线关系也就确定了,根据最大最小经 纬度及步长,就能绘出每张二维图对应的三维图。规则网格 DEM(Grid-DEM)实际上就是一个存放高程数据的二维阵 列,式 1。在矩形区域上,在横竖两个方向上,每隔一定步 长绘上直线,生成格网,然后利用已有的离散高程采样数据 估算每个格网节点的高程值。
κV ( Pi , P j ) ( κ 表示 κV ( Pi )
ℜ n 空间的 Leresgue 测度, κV ( Pi , Pj ) 称作 Sibson 系数) 。
2.2 数字高程模型的内插
DEM 建立过程中的关键环节是格网节点高程值的内插 计算,在数学上属于插值问题。任意的内插方法都是基于原 始地形起伏变化的连续光滑性, 由邻近的数据点内插得出待 定点的高程。本文采用基于 VoronoiCells 的自然邻接点插值 (natural neighbors interpolation)算法作为求算 DEM 网格节点 高程值的方法, 具有插值域稳定、 形函数满足 kroneker 条件、 高平滑度、满足分解及线性连续条件等优点 。首先说明两 个概念:Voronoi 图和自然邻接点。 定义 1 在 ℜ n 欧拉空间内,设 Vi 为离散点 xi 所对应 V o r o n o i 区 域 ,x 为 空 间 内 任 意 一 点 , Vi = {x ∈ℜ n | d ( x, xi ) < d ( x, x j ), ∀j ≠ i} 称 Vi 为点 xi 的 Voronoi 区 域 也 称 作 VoronoiCell , xi 为 此 区 域 的 生 长 点 ;