360度角度传感器说明书
米朗科技霍尔角度传感器使用说明.pdf说明书
米朗科技有限公司 电话:*************
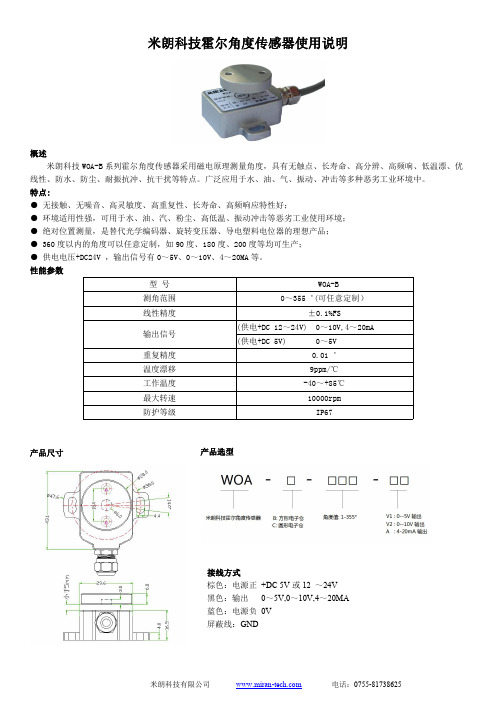
米朗科技霍尔角度传感器使用说明
概述
米朗科技WOA-B 系列霍尔角度传感器采用磁电原理测量角度,具有无触点、长寿命、高分辨、高频响、低温漂、优线性、防水、防尘、耐振抗冲、抗干扰等特点。
广泛应用于水、油、气、振动、冲击等多种恶劣工业环境中。
特点:
●无接触、无噪音、高灵敏度、高重复性、长寿命、高频响应特性好;
●环境适用性强,可用于水、油、汽、粉尘、高低温、振动冲击等恶劣工业使用环境;●绝对位置测量,是替代光学编码器、旋转变压器、导电塑料电位器的理想产品;●360度以内的角度可以任意定制,如90度、180度、200度等均可生产;●供电电压+DC24V ,输出信号有0~5V、0~10V、4~20MA 等。
性能参数
型
号WOA-B
测角范围0~355 (可任意定制)
线性精度±0.1%FS 输出信号(供电+DC 12~24V)0~10V,4~20mA (供电+DC 5V)
0~5V 重复精度0.01 温度漂移9ppm/℃工作温度-40~+85℃最大转速10000rpm 防护等级
IP67
产品尺寸
接线方式
棕色:电源正+DC 5V 或12~24V 黑色:输出0~5V,0~10V,4~20MA
蓝色:电源负0V
屏蔽线:GND
产品选型。
Beholder乐拍DS1中文说明书(10.21)

可能云台的底板和快装版上的橡胶减震贴纸没贴,按要求贴上即可。
4、为什么采用电池架充电时间比说明书叙述的充电时间长?
市面上有不少usb电源电流数虚标,采用电池架充电用2A的usb口充电都可以 在5小时内充满,一般笔记本电脑的USB3.0供电能力都可以大于2A,采用此 类USB口充电速度将大大提升,当然也可以选购Beholder多功能智能座充, 可以使您的充电时间缩短一半。
电池架的安装使用
a.锂电池正极朝上面 b.电池负极对着电池架的弹簧安装三个电池 c.把安装好电池的电池架按照安装在电池仓内 d.盖上后盖并拧紧后盖
! ●安装相机后才能启动电源 ● 后盖必须拧紧,保证接触通电。
3 © 2015 Beholder乐拍 版权所有
相机安装方式
1.安装滑块:把快装板从云台中取出,并如 右图(更宽的方向朝镜头安装),把相机装 到快装板上(1/4相机螺母不需要扭太紧, 使得快装板可在相机上左右移动)。
响应速度更快搭配双传感器稳定精度大大提高并且支持任意角度开机无需切换模式支持3轴向360度无死角增稳支持可翻屏系列相机支持外接遥控器实现有线或无线远程控制让您连接延长杆后可以直接成为移动摇臂实现摇臂镜头滑轨镜头及延时摄影
TRD系列Beholder DS1 (乐拍) 三轴单手持陀螺仪稳定器
V1.0 2015.10
适用相机型号
Beholder DS1支持轻于1.7KG(包括镜头)的主流单反相机及微单相机, 支持佳能6D/5D/7D、支持较大的微单,如A7R2、A7S+24- 70/12- 35 ,GH4+12- 35,GH3+14- 140等相机。
手持摄影云台拍摄角度范围
TLE5012B英飞凌Infineon 360°角度传感器GMR巨磁阻

TLE5012B英飞凌Infineon 360°角度传感器GMR巨磁阻Infineon TLE5012B GMR-Based Angle Sensors英飞凌TLE5012B 基于GMR 的角度传感器是一款360°角度传感器,可检测磁场的方向。
这是通过使用单片式集成巨磁阻(iGMR)元件测量正弦和余弦角分量来实现的。
可对原始信号(正弦和余弦)在内部进行数字处理以计算磁场(磁铁)的角方向。
TLE5012B 是经过预校准的传感器。
校准参数存储在激光引信中。
启动时引信值被写入双稳态多谐振荡器触发电路中,在其中这些值可由具体应用的参数进行修改。
数据通信通过一个兼容SPI 的双向同步串行通信接口(SSC)实现。
传感器配置存储在寄存器中,可由SSC 接口进行访问。
特点巨磁阻(GMR)原理集成磁场感应用于角度测量360°角度测量,有转数表和角速度测量两个单独的高精度单位SD-ADC绝对角度值在输出端的15 位表示( 0.01°的分辨率)正弦/余弦值在接口上的16 位表示使用周期和温度范围内最大为1.0°的角度误差,并有激活自校准功能达8Mbit/s 的双向SSC 接口有诊断功能和状态信息,支持安全完整性等级(SIL)接口:SSC、PWM、增量接口(IIF), 霍尔开关模式(HSM), 短PWM 码(SPC, 基于SAE J2716 中规定的SENT 协议)输出引脚可配置(编程或预配置)为推挽或开漏SSC 或SPC 接口为开漏配置时,可以实现一条线上多个传感器的总线模式工作0.25μm CMOS 技术汽车级:-40°C 到+ 150°C(结温)ESD > 4kV (HBM)符合RoHS(无铅封装)不含卤素应用:电换向电机,旋转开关,转向角测量,通用角测量方框图Block DiagramInfineon Technologies AG(英飞凌)近日宣布推出了其首款基于TMR(隧道磁阻)技术的磁传感器系列产品。
电阻式角度传感器

电阻式角度传感器内部有一个类似螺旋线的骨架,在这个骨架上从头到尾绕有一整根电阻丝。
当传感器的轴作360度旋转时,压在电阻丝上的滑臂也可以顺着螺旋骨架旋转360度。
当然,多圈螺旋骨架可以使滑臂也旋转多圈,但最后总有一个端点(或电阻跳变点),它不可能永远旋转下去而电阻不跳变。
多圈螺旋骨架结构,可以大大提高电阻式角度传感器的分辨率和量程.
角度编码器,类似于位移尺,通过模拟量来显示角度变化量,角度编码器有90度的和360度的,有多功能显示器,可以直接把角度编码器接到显示器上显示角度变化。
市场上都有卖的。
找都能找到。
角度传感器,顾名思义,是用来检测角度的。
它的身体中有一个孔,可以配合乐高的轴。
当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。
往一个方向转动时,计数增加,转动方向改变时,计数减少。
计数与角度传感器的初始位置有关。
当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位.。
360度ALPS传感器RDC803001A

8mm 12mm
8mm 9mm 12mm
–40℃ to +105℃ 100,000 cycles
●
生命周期
机械性 能
动作力 旋转扭矩
1.96mN・m max.
-
-
2mN・m max.
-
- 0.25N max.
10mN・m max. 100mN・m
-
2N max. -
总电阻值许容 误差
±30%
±20%
电阻式 位置传感器
手工焊接方式的参考举例
系列 RDC50, RDC90, RDC80 RDC10, RD7
烙铁头温度 350±5℃ 350℃ max.
焊接时间
3 +1 0
s
3s max.
浸焊方式的参考举例
系列
RDC501, RDC502 RD7
预热
焊接面表面温度
加热时间
100 to150℃ 100℃ max.
线性保证范围 330°(1相) 360°(2相)
线性 ±3%
通孔形状 φ4.05
最小订货单位(pcs.)
日本
出口
1,600
1,600
产品编号 RDC803001A
电阻式 位置传感器
包装规格 载带
卷盘尺寸
IPMF
Unit:mm
包装数 (pcs.)
载带宽度 出口包装箱尺寸
1卷
1 箱 / 日本
1 箱 / 出口包装
电阻式位置传感器 产品规格
关于线性的规定方法
Model RDC40
100 VA
Model RDC80
电阻式 位置传感器
ʢˋʣ ʶ1%
角度传感器简介
无触点角位移传感器
特点:角度传感器采用新型磁敏感元件将机械转动或角位移转化为电信 号输出可无触点的测量 转动角度的变化输出模拟电压信号与线绕式金属膜式导电膜式结构相比具有 特点 ·无触点 ·高灵敏度 ·极长寿命 ·高可靠性 ·360 连续转动 角位移传感器将机械转动或角位移的电信号变化经精密集成电路处理标准转 台标定在 角度测量范围内对应输出的标准电压或电流信号可以精确测量出角度和角位 移值 可后接显示仪表显示角度仪表可选带报警功能角度设定功能PID 调节以及计 算机 通讯接口和打印接口等多项功能 本产品广泛的用于工业自动化的测量和监控系统尤其适用于机械变化频繁环 境恶劣需 使用寿命长可靠性高的场合具体应用于航空电子机械纺织船舶冶金等行业
Functions linear, on request specific law Theoretical electrical angle (TEA) TEA = actual electrical angle (AEA) – 2° Independent linearity (over TEA) A ≤ ± 1% B ≤ ± 0.5% C ≤ ± 0.25% D ≤ ± 0.1% on request NA down to E ≤ ± 0.05% down to F ≤ ± 0.025% down to ≤ ± 0.015% Actual electrical angle (AEA) 340° ± 3° 350° ± 2° Ohmic values (RT) 1kΩ - 2kΩ - 5kΩ - 10kΩ - on request other values Ohmic value tolerances at 20°C ± 10%; on request ± 5% Output smoothness ≤ 0.025% on request ≤ 0.01% Maximum power rating at 70°C 0.25W 0.3W 0.4W 0.5W 0.75W 1W 1.2W 1.5W Wiper current / load resistance recommended: a few μA - 1mA max. continuous / minimum 103 x RT Tap (current or voltage) { Position: ± 2° on request with angular position to be specified U = current { Width: ≤ 4° T = voltage Position: ± 2° Repeatability ≤ 0.01 % End voltage ≤ 0.4% for 470Ω ≤ RT ≤ 1000Ω / ≤ 0.2% for 1000Ω < RT ≤ 2200Ω / ≤ 0.1% RT > 2200Ω Insulation resistance ≥ 1000MΩ, 500Vdc Dielectric strength ≥ 750VRMS, 50Hz ≥ 1000VRMS, 50Hz SIZE MODEL 08 34 SF 09 78 SF 11 116 SF 13 156 SF 15 176 SF 18 134 SF 20 200 SF 30 300 SF ELECTRICAL SPECIFICATIONS Mechanical rotation 360° continuous; stops on request Mounting/shaft guiding servo/ball bearings Housing diallylphtalate; on request anodized aluminum Termination turrets; on request flexible leads, cables... Wiper precious metal multi-finger contact Starting torque (N.cm) 1 cup 0.2 0.25 each additional cup 0.15 Moment of inertia (g. cm2) 0.3 0.4 0.6 0.8 2.2 2.8 3.5 10 Weight (g) 1 cup 11 ± 2 16 ± 2 20 ± 2 29 ± 2 49 ± 2 67 ± 3 79 ± 3 120 ± 10 each additional cup 5 ± 2 6 ± 2 7 ± 2 10 ± 2 16 ± 2 18 ± 3 21 ± 3 62 ± 10 Life (million of cycles) ≥ 50 Temperature range – 55°C, + 125°C Climatic category 55 / 125 / 04 Maximum rotation speed (RPM) 600 Sine vibration on 3 axes 1.5mm or 20g from 10Hz to 2000Hz
旋转角度传感器的机械参数

旋转角度传感器是一种常用的检测仪器,具有分辨率高、温度稳定性好、耐用性强等优点,在机器动物、汽车开关、电动机驱动件、汽车装置等领域中都有一定的应用。
接下来艾驰小编主要来为大家介绍一下旋转角度传感器的机械参数吧,希望可以帮助到大家。
启动扭力矩《0.3ncm
最大转速3000rpm
寿命》3000万次循环
允许轴端荷载水平《15n 垂直《15n
防护等级ip67
供电电压12、24v通用(极限8至30v)
功耗空载电流约20ma
量程0至360度
输出分辨率0.088度(模拟输出)
输出精度校准版:0.1%(0.36度)
常规版:0.5%(1.8度)
输出响应速度》1000次/秒
输出温度系数《100ppm(通常30-60ppm)
使用温度范围-40至85摄氏度
艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城/。
MagnTek MT6816 高分辨率无延迟磁场角度位置传感器IC说明书

Features and Benefits■Based on advanced AMR Technology with 0~360°Full Range Angle Sensing ■14 bit Core Resolution■Maximum Rotation Speed 25,000 RPM ■Output Propagation Delay <2 us■-40~125℃ Industry Operating Temperature Range■Output Interface: ABZ、UVW,PWM or SPI ■Incremental ABZ Resolution 1~1024 Pulses per Revolution User Programmable ■UVW Output Resolution 1~16 Pole-Pairs per Revolution User Programmable ■SOP-8 PackageGeneral DescriptionTheMagnTekrotarypositionsensorMT6816is an IC based on advanced AMR technology.A rotating magnetic field in the x-y sensor plane delivers two sinusoidal output signals which indicating the angle(α)between the sensor and the magneticfield direction.The sensor is only sensitive to the magnetic field direction in x-y plane as the sensing element output is specially designed to be independent from the magnet field strength.This allows the device to be less sensitive to magnet variations,stray magnetic fields,air gap changes and off-axis misalignment.TheincrementalABZoutputmodeisavailable in this sensor series,making thechip suitable to replace various optical encoders.The maximum resolution is 4096steps or 1024pulses per revolutionA standard SPI (3-Wire or 4-Wire)interface allows a host microcontroller to read out the 14-bit absolute angle position data from MT6816.The absolute angle position is also provided as a 12bit PWM output.Applications■Absolute Angle Position Sensor ■BLDC Motor Control ■Servo Motor Control ■Stepping Motor Control ■Optical EncoderReplacementTable of ContentsFeatures and Benefits (1)Applications (1)General Description (1)1Pin Configuration (3)2Function Diagram (4)3Absolute Maximum Ratings (5)4Operating Conditions (5)5Electrical Characteristics (6)6Magnetic Input Specifications (8)7Output Mode (9)7.1I/O Pin Configuration (9)7.2Reference Circuit for ABZ,UVW and PWM Mode (10)7.3Quadrature A,B and Zero-Position Output Signal(ABZ Mode) (11)7.4UVW Output Mode (15)7.5Pulse Width Modulation(PWM)Output Mode (16)7.6SPI Interface (17)7.6.1SPI Reference Circuit (17)7.6.2SPI Timing Diagram (18)7.6.34-Wire SPI (19)7.6.43-Wire SPI (20)7.6.5SPI Read Angle Register (21)8MTP Programming (23)9Magnet Placement (24)10Mechanical Angle Direction (25)11Package Information (26)12Copy Rights and Disclaimer (27)13Revision History (28)1. Pin Configuration3Figure 1: Pin Configuration of MT6816(SOP-8) PackagePart Number DescriptionMT6816CTSOP-8 Package, Tube Pack (100pcs/Tube) or Tape & Reel Pack (3000pcs/Reel)Family MembersPin List*SOP-8 Reflow Sensitivity Classification: MSL-3Sensing Center at Geometry Center12348765Name #Type Description CSN 1Digital Input SPI Chip SelectionHVPP 2Power Supply OTP Programming Supply(7V)or SPI Enable OUT 3Digital Output PWM Output VDD 4Power Supply 3.3~5.0V SupplyA/U 5Digital Input/output Incremental Signal A/U or SPI MOSI(4-Wire), SDAT(3-Wire)B/V 6Digital Input/output Incremental Signal B/V or SPI MISO(4-Wire)Z/W 7Digital Input Incremental Signal Z/W or SPI Clock GND8GroundGround2. Functional DiagramFigure 2: Block DiagramThe MT6816is manufactured in a CMOS standard process and uses advanced magnet sensing technology to sense the magnetic field distribution across the surface of the chip.The integrated magnetic sensing element array is placed around the center of the device and delivers a voltage representation of the magnetic field at the surface of the IC.Figure 2shows a simplified block diagram of the chip,consisting of the magnetic sensing element modeled by two interleaved Wheatstone bridges to generate cosine and sine signals,gain stages,analog-to-digital converters (ADC)for signal conditioning,and a digital signal processing (DSP)unit for encoding.Other supporting blocks such as LDO,etc.are also included.G GADCADCDSPLDO CalibrationNVMABZ /-A-B-ZPWMVDD HVPPA B ZOUTCSNM U XOSCSPIUVWVSS Angle CalculationInterpolatorMagnetic Sensing ElementI/V REF3. Absolute Maximum Ratings (Non-Operating)ParameterMin.Max.Unit NotesDC Voltage at Pin VDD -0.5 6.5V DC Voltage at Pin HVPP-0.58V Terminal Voltage at Input and Output Pins -0.5VDD V ABZ,OUT Output Current at Output Pins -2020mA ABZ, OUT Storage Temperature-55150℃Electrostatic Discharge (CDM)-±1.0KV Electrostatic Discharge (HBM)-±3.0KVStresses beyond those listed under “Absolute Maximum Ratings”may cause permanent damage to the device.These are stress ratings only.Functional operation of the device at these or any other conditions beyond those indicated under “Operating Conditions”is not implied.Exposure to absolute maximum rating conditions for extended periods may affect device reliability.4. Operating ConditionsParameterMin.Max.Unit DC Voltage at Pin VDD3.0 5.5V DC Voltage at Pin HVPP (If Used) 6.757.25V Magnetic Flux Density Range 301,000mT Rotation Speed -25,000RPM Operating Temperature-40125℃5. Electrical CharacteristicsOperation conditions:Ta=-40to 125℃,VDD=3.0~5.5V unless otherwise noted.Symbol1Parameter Conditions/Notes Min.Typ.Max.Unit VDD Supply Voltage - 3.0 3.3~5.0 5.5V HVPP Supply Voltage - 6.757.07.25V Idd Supply Current -51015mA LSB Resolution (ABZ Mode)N Steps per Cycle -360°/N -°INL Integral Non-Linearity Note(1)-±0.75±1.5°DNL Differential Non-Linearity (ABZ Mode), Figure 3@1000 PPR-±0.01-°TN Transition Noise (ABZ Mode)25℃, HYST=4 Note(2)-0.01-°rms Hyst Hysteresis (ABZ Mode)HYST=0 Note(2)-0.022-°T PwrUp Power-Up Time VDD Ramp<10us-16-ms T DelayPropagation Delay-13usPWM Output Characteristics Conditions/Notes Min.Typ.Max.Unit FPWM PWM Frequency Programmable -971.1/485.6-Hz T Rise Rising Time C L =1nF --1us T FallFalling TimeC L =1nF--1usNote (1):The typical error value can be achieved at room temperature and with no off-axis misalignment error.The maximum error value can be achieved over operation temperature range,at maximum air gap and with worst-case off-axis misalignment error.Note (2):HYST could be set to:0=1LSB,1=2LSB,2=4LSB,3=8LSB,4=0LSB,5=0.25LSB,6=0.5LSB,7=1LSB.Here 1LSB=360°/214=0.022°.Digital I/O Characteristics(Push-Pull Type in Normal Mode)Symbol Parameter Conditions/Notes Min.Typ.Max.Unit V IH High Level Input Voltage-0.7*VDD--V V IL Low Level Input Voltage---0.3*VDD V V OH GPIO Output High Level Push-pull (Iout=2mA)VDD-0.25--V V OL GPIO Output Low Level Push-pull(Iout=2mA)--0.25VFigure 3: Drawing Illustration INL, DNL and TN (for 10 bit case)6. Magnetic Input SpecificationsOperation conditions:Ta=-40to 125℃,VDD=3.0~5.5V unless otherwise noted,two-pole cylindrical diametrically magnetized source.Symbol ParameterConditions/Notes Min.Typ.Max.UnitDmag Diameter of Magnet Recommended Magnet: Ø10mm x 2.5mm for Cylindrical Magnets -10-mmTmag Thickness of Magnet -- 2.5-mm Bpk Magnetic Input Field Amplitude Measure at the IC Surface 30-1,000mT AG Air Gap Magnetic to IC Surface Distance- 2.0 3.0mm RSRotation Speed--25,000RPMDISPOff Axis MisalignmentMisalignment ErrorBetween Sensor Sensing Center and Magnet Axis (See Figure 4)--0.3mmTCmag1Recommended Magnet Material and Temperature Drift CoefficientNdFeB (Neodymium Iron Boron)--0.12-%/℃TCmag2SmCo (Samarium Cobalt)--0.035-Figure 4: Magnet ArrangementAir GapOff-axis MisalignmentN S7. Output ModeThe MT6816provides ABZ,UVW and PWM signals at output pins,and also 14-bit absolute angle position data could be transferred by SPI interface (Both 3-Wire and 4-Wire modes).7.1 I/O Pin ConfigurationPin#3-Wire SPI4-Wire SPIABZ+PWMUVW+PWM1CSN CSN VDD VDD 3PWM PWM PWM PWM 5SDAT MOSI A U 6-MISO B V 7SCKSCKZWI/O Pin Configuration For SOP-8package,ABZ,UVW,PWM and SPI Interface are configured as below table.Figure 5: ABZ, UVW and PWM Output Reference Circuit w/o MTP Programming7.2 Reference Circuit for ABZ, UVW and PWM ModeFigure 6: ABZ, UVW and PWM Output Reference Circuit w/i MTP Programming12348765A/UB/V Z/W VDDTVS(6V)0.1ufPWM NC12348765A/UB/V Z/W VDDTVS(6V)0.1ufPWM HVPP1uf NC7.3 Quadrature A,B and Zero-Position Output (ABZ Mode)As shown in Figure 7,when the magnet rotates counter-clock-wise (CCW),output B leads output A by 1/4cycle,when the magnet rotates clock-wise (CW),output A leads output B by 1/4cycle (or 1LSB).Output Z indicates the zero position of the magnet.After chip power-on,the ABZ output is blocked for 16ms to guarantee proper output.Figure 7: ABZ output with VDD power onAZCCWB360°VDDCW16msOutput Z indicates the zero position of the magnet and the pulse width of Z is selectable as 1,2,4,8,12,16LSBs and 180°as shown in Figure 8and Figure 9.It is guaranteed that one Z pulse is generated for every rotation.The zero position is user programmable。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
七、可编程输出形式专用角度传感器:
产品型号
DWQT-360-ZY-V
参数名称
测试条件
最小
参数值 典型
最大
单位
电源电压 VDD
9
12
24
V
消耗电流 Is
10
16
mA
转动角度
-15°~-135° 15°~ 135°
-135°~-180°
-15°~15°
135°~ 180°
Deg
输出信号
RL > 1KΩ
0.00(中点)
10.00
Deg ±0.01V
存储温度 Ts
-55
150
ºC
使用温度 TA
商业级 0~55
工业级-20~80 军工器件-40~125 ºC
中点温漂 -40ºC <TA<125ºC
≤ ±5mV
FS
满度温漂 分辨率
(等效 4096 分度)
商业级 1%
工业级 0.5%
军工器件 0.5%
FS
工业级 0.5%
军工器件 0.5%
FS
分辨率 (等效 4096 分度)
0.087o
Deg
线性度
0.2% (≤60°) ±0.3% (≤150°) ±0.5% (≥150°)
FS
防护等级
IP 60 ~ I P 67
输出与接线 屏蔽线, 聚四氟高温导线, 航空插头,红 — 正极 黑 — 负极 黄 — 输出
分辨率
(等效 4096 分度)
0.04 o
0.087 o
Deg
线性度
0.2%(≤60°) ±0.3%(≤150°)
±0.5%
FS
防护等级
IP 60 ~ IP 67
输出与接线
屏蔽线, 聚四氟高温导线, 航空插头,红 —正极 黑 — 负极 黄 — 输出
备注
0~360°全量程多圈测量时,4mA 至 20mA 之间输出信号跳变死区 ≤0.2°
分辨率 线性度 防护等级
0 ~ θ1 0 - V1
(等效 4096 分度)
±0.3%
D W Q T-360-ZY2-V
参数值
最小
典型
最大
9
12
24
10
16
θ1 ~ θ2
θ2 ~ θ3
θ3 ~ θ4
V1
V1 - 5.0
5.0
-55
150
工业级-20~80 军工器件-40~125
工业级 0.5% 0.087o
2
北京天海科科技发展有限公司
联系电话:010-82376719 010-81603449 010-62332738 (FAX) 网址: 地 址:北京市海淀区学院路 30 号北京科技大学理学楼 102 室 邮编:100083 联系人:田跃 郑伟 E-mail: ytian202@. Zheng_wei119@
备注
输出低电压不能达到绝对 0,最低 0.05V; 0~360°多圈测量时 Vout 输出死区≤2°
3
北京天海科科技发展有限公司
联系电话:010-82376719 010-81603449 010-62332738 (FAX) 网址: 地 址:北京市海淀区学院路 30 号北京科技大学理学楼 102 室 邮编:100083 联系人:田跃 郑伟 E-mail: ytian202@. Zheng_wei119@
1
北京天海科科技发展有限公司
联系电话:010-82376719 010-81603449 010-62332738 (FAX) 网址: 地 址:北京市海淀区学院路 30 号北京科技大学理学楼 102 室 邮编:100083 联系人:田跃 郑伟 E-mail: ytian202@. Zheng_wei119@
二、电压比例输出 产品型号
参数名称
测试条件
最小
除特别说明外,VDD=5.00V, TA=25℃
DWQT-BL-V-
参数值 典型
最大
单位
电源电压 VDD 消耗电流 Is
4.5
5.0
5.5
V
10
16
mA
测量量程 VFS 中点输出 VO 满度输出 FS
存储温度 Ts
RL>2KΩ
0~360°范围内,可根据客户要求调试
Deg
中点输出 IO
11.9
12.0
12.1
mA
满度输出 FS
RL<250Ω
4.0
20.0
mA
存储温度 TS
-55
150
℃
使用温度 TA
商业级 0~50 工业级-20~80 军工器件-40~125
℃
中点温漂
-40℃<TA<125℃
±0.01
mA
满度温漂
商业级 1%
工业级 0.5%
军工器件 0.5%
FS
数字量输出产品选型技术参数指标
一、PWM 输出 参数名称
电源电压 供电电流 存储温度 使用温度 输出电压 输出电流
0.02 0.02
2.50(中点) 5.00(中点)
5.00 10.00
±0.01V
VDD=24V
0.02
10.00(中点)
20.00
存储温度 Ts
-55
150
ºC
使用温度 TA
商业级 0~55
工业级-20~80 军工器件-40~125 ºC
中点温漂 -40ºC <TA<125ºC
≤ ±5mV
FS
满度温漂
军工器件 0.5%
FS
0.087o
Deg
线性度 防护等级
0.2% (≤60°)
±0.3% (≤150°) ±0.5% (≥150°)
FS
IP 60 ~ I P 67
输出与接线 屏蔽线, 聚四氟高温导线,红—电源正;黑—电源负;黄—输出正;蓝-输出负
备 注 单极性电源输入,要求传感器负载高阻抗;0~360°多圈测量时 Vout 输出死区≤2°
六、正负电源输入正负电压输出
除特别说明外 TA=25℃
产品型号
DWQT-BZ-±V±-
参数名称
测试条件
最小
参数值 典型
最大
单位
电源电压 VDD
± 12
V
消耗电流 Is
10
16
mA
测量量程 VFS 输 出 FS
RL > 1KΩ
0~360°范围内,可根据客户要求调试
-5.00
0.00(中点)
5.00
-10.00
模拟量输出产品选型技术参数指标
一、4~20mA 标准化输出
电气参数
产品型号
除特别说明外,VDD=12V,TA=25℃。
DWQT-BZ-A-
参数名称
测试条件
最小
参数值 典型
最大
单位
电源电压 VDD
8
12
24
V
消耗电流 IS
50
mA
负载阻抗 RL
0
250
Ω
测量量程 IFS
0~360°范围内,可根据客户要求调试
Deg
2.49
2.50
2.51
V
10%VDD
0.5~4.5V
90%VDD
-
0.05
标称输出 0~5V
4.95
V
-55
150
ºC
使用温度 TA 中点温漂 -40ºC <TA<125ºC
商业级 0~55
工业级-20~80 军工器件-40~125 ºC
≤±5mV
FS
满度温漂 分辨率
(等效 4096 分度)
备注
0~360°多圈测量时 Vout 输出死区≤0.2°
四、标准化过零电压输出 产品型号
除特别说明外 TA=25℃
DWQT-BZ-V-
参数名称
测试条件
最小
参数值 典型
最大
单位
电源电压 VDD
9
12
24
V
消耗电流 Is
10
16
mA
测量量程 VFS
0~360°范围内,可根据客户要求调试
Deg
输 出 FS RL>2KΩ VDD=12V
-
商业级 1%
工业级 0.5%
军工器件 0.5%
FS
分辨率 (等效 4096 分度)
0.087o
Deg
线性度
0.2% (≤60°) ±0.3% (≤150°) ±0.5% (≥150°)
FS
防护等级
IP 60 ~ I P 67
输出与接线 屏蔽线, 聚四氟高温导线, 航空插头,红 — 正极 黑 — 负极 黄 — 输出
0.087o
Deg
线性度 防护等级
0.2% (≤60°)
±0.3% (≤150°) ±0.5% (≥150°)
FS
IP 60 ~ I P 67
输出与接线 屏蔽线, 聚四氟高温导线,红—电源正;黑—电源负;黄—输出正;蓝-公共端
备 注 传感器负载常规阻抗; 0~360°多圈测量时 Vout 输出死区≤2°
3.00(中点) 5.00(中点)
5.00 9.00
±0.01V
VDD=24V
1.00
10.00(中点)
19.00
存储温度 Ts
-55
150
ºC
使用温度 TA
商业级 0~55
工业级-20~80 军工器件-40~125 ºC
中点温漂 -40ºC <TA<125ºC